
Development of the Romanian Radar Sensor for Space Surveillance and Tracking Activities †


 ,
,
Abstract
:1. Introduction
- Space Surveillance and Tracking (SST), which is dedicated to detecting, observing, and monitoring man-made Earth-orbiting objects as a tool for collision risk assessment and prevention;
- Space Weather (SWE), which is dedicated to the monitoring and prediction of dangerous levels of radiation and high energetic particles due to solar activity that may negatively impact ground or space-based electronic systems and humans;
- Near-Earth objects (NEO), which is tasked with detecting and monitoring natural space objects passing close to Earth and posing a threat to our planet.
- (a)
- assessing and reducing the risks to in-orbit operations of European spacecraft relating to collisions and enabling spacecraft operators to plan and carry out mitigation measures more efficiently;
- (b)
- reducing the risks relating to the launch of European spacecraft;
- (c)
- surveying uncontrolled re-entries of spacecraft or space debris into the Earth’s atmosphere and providing more accurate and efficient early warnings with the aim of reducing the potential risks to the safety of Union citizens and mitigating potential damage to terrestrial infrastructure;
- (d)
- seeking to prevent the proliferation of space debris.
2. Characteristics and Performance of Some European SST Radars
- The GRAVES radar (Grand Reseau Adapte a la Veille Spatiale) is a bistatic radar operating in the VHF band with transmitters located near Dijon and receivers located near Apt, France, operated by the French air force. GRAVES concerns itself with active satellites as a priority, carries out continuous surveys, and is able to acquire simultaneous observation data (angles, Doppler shifts, and Doppler rates) for several objects to an altitude of maximum 1000 km, equivalent to a range of more than 2500 km [9].
- The S3TSR radar (Spanish Space Surveillance and Tracking Surveillance Radar) is a ground-based radar in close monostatic configuration operating at the L band from 1215 to 1400 MHz and capable of providing automatic surveillance and tracking of space objects in LEO from 200 km to 2000 km of orbit height above Earth. The design of S3TSR allows for scalable evolution in size and capabilities by adding multiple Tx and Rx units. The sensor is fully operational since early 2019 and is providing high-accuracy orbital data of more than 2400 LEO objects included in the catalogue maintained by the Spanish Space Surveillance and Tracking Operation Centre (S3TOC), which also generates autonomous conjunction analysis products [10,11].
- The Italian radar sensor BIRALES (BIstatic RAdar for LEo Survey) is a UHF band (410 MHz) bistatic radar composed of a transmitter antenna situated in Cagliari, Sardinia, and a portion of the Northern Cross Radio Telescope operating as a receiving antenna situated in Medicina, Emilia-Romagna, at a 580 km distance. The transmitter is able to supply a maximum power of 10 kW and uses a 7 m fully steerable wheel-and-track parabolic antenna, with a maximum speed of 3 deg/s. The two installations operate for the space surveillance of debris in the LEO. The radar sensor initially operated in CW mode and performed only Doppler measurements. The system was upgraded to use pulse compression, which enables BIRALES to also perform range measurements [12,13].
- The sensor BIRALET (BIstatic RAdar for LEo Tracking) is a bistatic radar configuration located in Sardinia, Italy. The transmitter is a 7 m fully steerable wheel-and-track parabolic antenna located north of Cagliari that transmits a continuous wave (CW) signal of 10 kW at 410 MHz. The receiving system is the Sardinia Radio Telescope (SRT), a 64 m fully steerable wheel-and-track parabolic antenna devoted mainly to radio astronomical observations located at approximately a 40 km distance from the transmitter operating in the frequency range from 0.3 to 116 GHz. The antenna Gain at 410 MHz is 46.6 dBi, and the efficiency at 410 MHz is 57.7%. During measurement campaigns, the BIRALET has been able to detect objects in orbit with radar cross-section (RCS), ranging from 0.13 to 13.4 m2 in the range interval between 459 and 1224 km [14,15].
3. Cheia Space Surveillance and Tracking Radar Design Overview
Radar Site Antennas Opportunities and Constraints
- C-band quasi-monostatic fadar: In this architecture, both Cheia antennas are retrofitted. One of the Cheia antennas performs transmission on one circular polarization, while the second antenna performs reception on the opposite polarization.
- C-band monostatic: In this architecture, only one of the Cheia antennas is retrofitted. It performs both transmission and reception. The radar transmits to the LHCP port and receives at the RHCP port of the same antenna.
- C-band bistatic: In this architecture, only one of the Cheia antennas is retrofitted. It performs transmission, while the reception sites must be placed at another site, probably outside Romania. Several reception sites can be used simultaneously.
- The two 32 m diameter parabolic Cassegrain beam-waveguide-type antennas were initially designed for large bandwidth operation in the range 3.6 to 6.4 GHz. The antenna main reflector, subreflector, and feed waveguide were improved to achieve the largest possible gain and the best parameters in this bandwidth. The antenna analysis determined that any modification of the antenna system would incur high costs and likely lower the antenna merit factor (G/T ratio); the conclusion was to employ them without any customization.
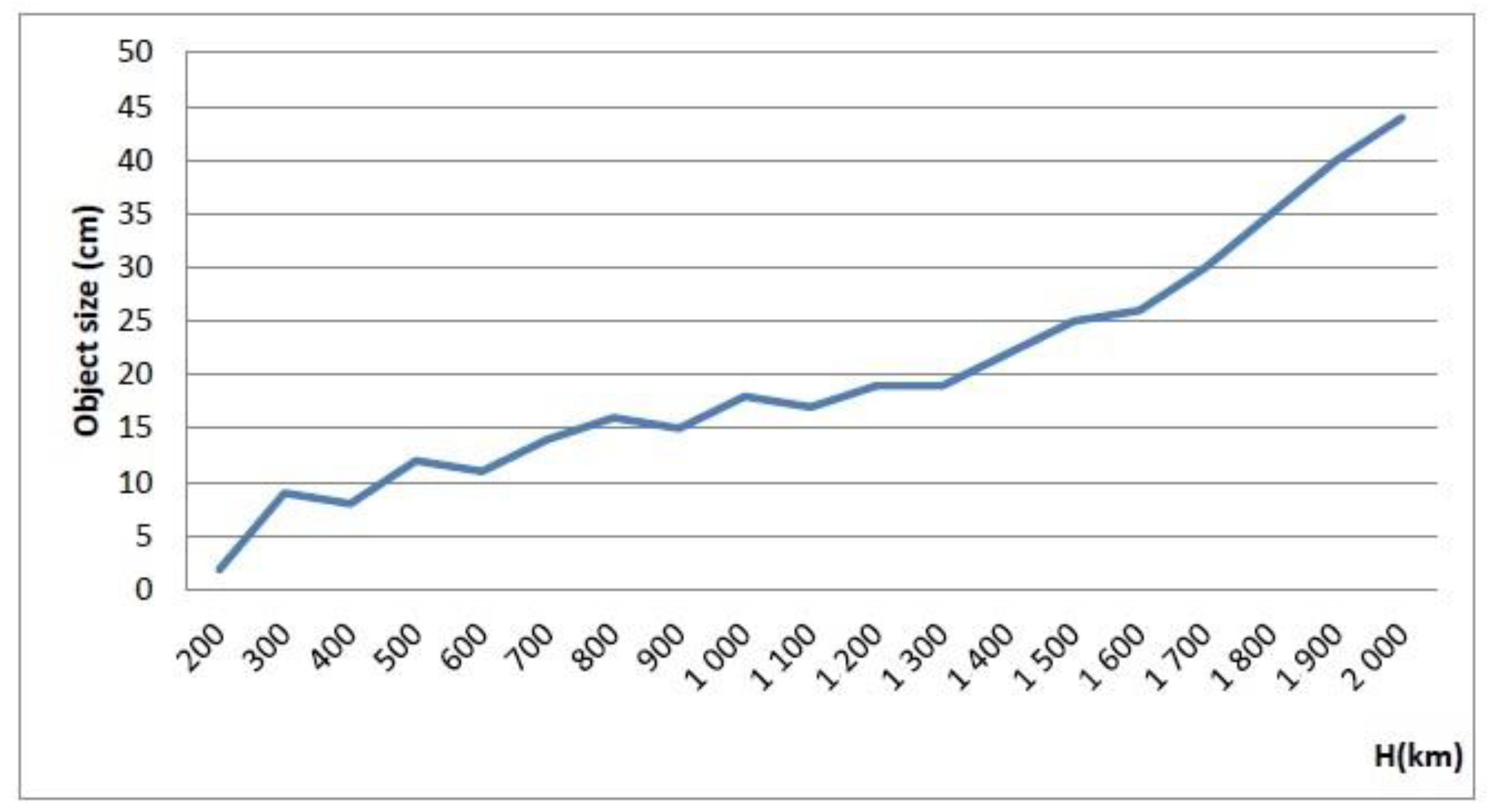
- The originally designed transmitted-power-handling capability of the antennas in the 6 GHz band using the original structure of the feed was limited to 10 kW CW. Radar modelling showed that 2.5 kW of CW-transmitted power provided satisfactory dimensions of the discovered space objects. In the CW mode of operation, the radar would be able to detect and track objects with dimensions of over 40 cm in LEO at a maximum of 2000 km altitude. In the pulsed mode, using a duty cycle of 30% would increase the dimensions of discovered objects by a factor of three.
- The original antenna positioning system provided a positioning and slewing velocities limited to 0.3°/s on both axes, which was considered to be insufficient for tracking fast space objects. It was determined that the technically obsolete existing system should be reformed and upgraded by replacing main parts of the driving mechanism in order to increase the tracking and slewing speeds to 1.0°/s on each axis.
- An analysis of the results to be achieved in terms of separation between objects close to each other in orbit showed that, as the antenna beamwidth at the selected operating frequency was 0.11°, the angular resolution was limited to 0.06°. Even if the radar system would not use monopulse technology to improve the angular accuracy, taking into account the limited antenna positioning and slewing speed, the radar would provide good results in tracking LEO objects based on TLE data.
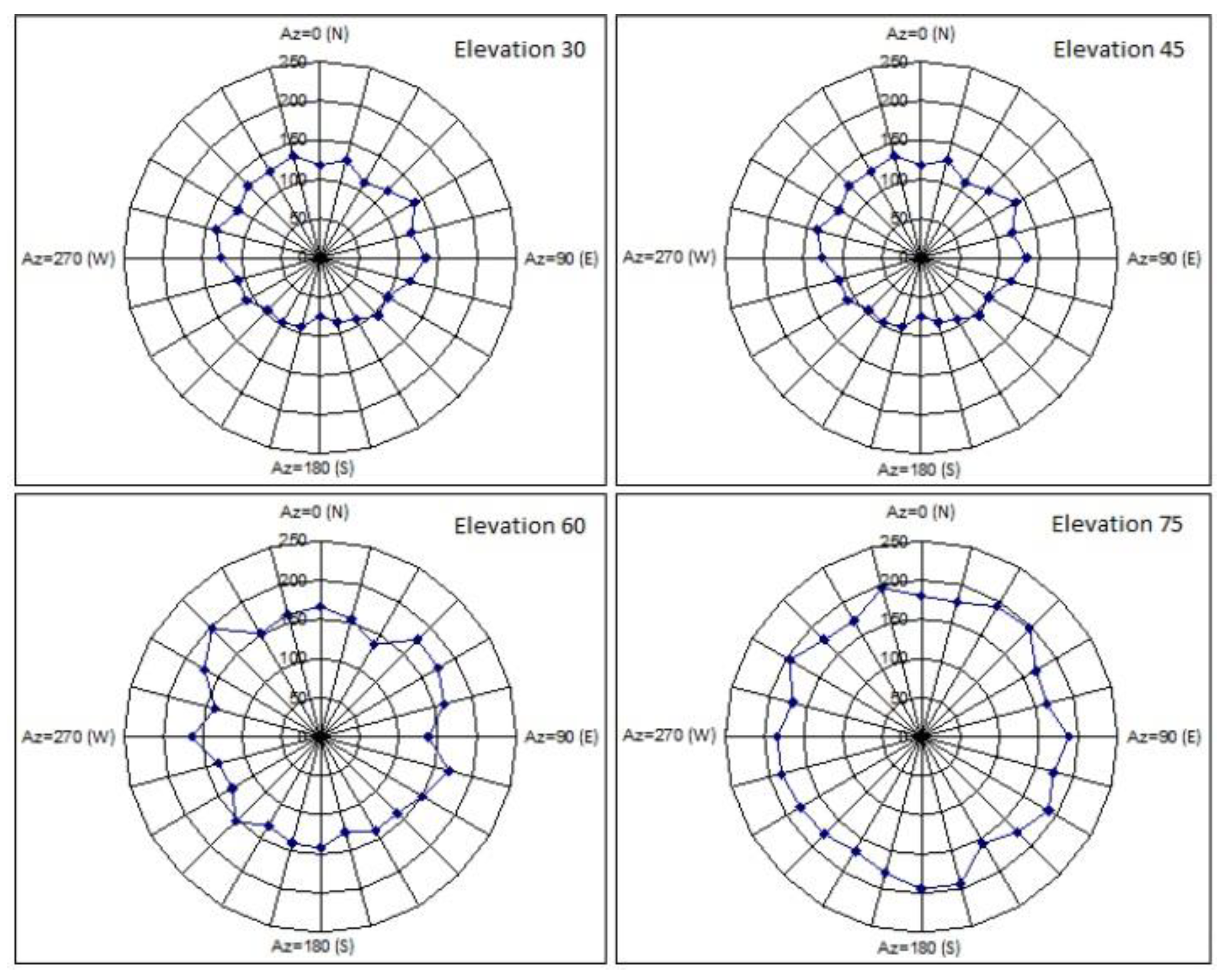
- The tracked radar targets must be located within a limited visibility domain to be detected. Each antenna has an azimuth scanning range of ±170° around south and 0° to 92° in elevation. Additional limitations that are due to existing buildings, installations, trees, or other natural terrain features in the close vicinity of the antennas were determined during in situ tests.
4. Tracking Radar Design
4.1. Design Assumptions
- Operation with two antennas in quasi-monostatic architecture with an 80 m baseline: In this setup, the Cheia 1 antenna was used for transmitting (Tx), and the Cheia 2 antenna was used for receiving (Rx).
- While the antenna bandwidth allowed functioning in both radar S and C bands, the frequency range chosen for radar probing signals was 5830–5850 MHz because, in the C band, antenna performances are higher, and this interval was also very close and partly coinciding with the antenna specified bandwidth of 5845–6425 MHz.
- Dual mode modulation capability: The basic operation scenario was continuous wave (CW) modulation, which offers superior performances. The frequency-hopping pulsed (FH-P) mode was also investigated, which offers theoretically superior performances in a dense target situation and mitigates the risk of possible interference between the Tx and Rx antennas.
- Transmitted power: For the output power of the Tx amplifiers, the value of 2.5 kW was finally chosen (−3 dB from the 5 kW saturation point of the PA). This was an optimum value relative to the budget and the minimum size of detectable objects.
- Improved velocity of the antenna positioning system: The retrofitted radar antennas would be capable of superior performances compared to the originals by installing new drive motors and a tracking system, resulting in an increase of the slew velocity above the original 0.3°/s to the target of 1°/s.
4.2. Estimated Theoretical Performance of The Considered Solution
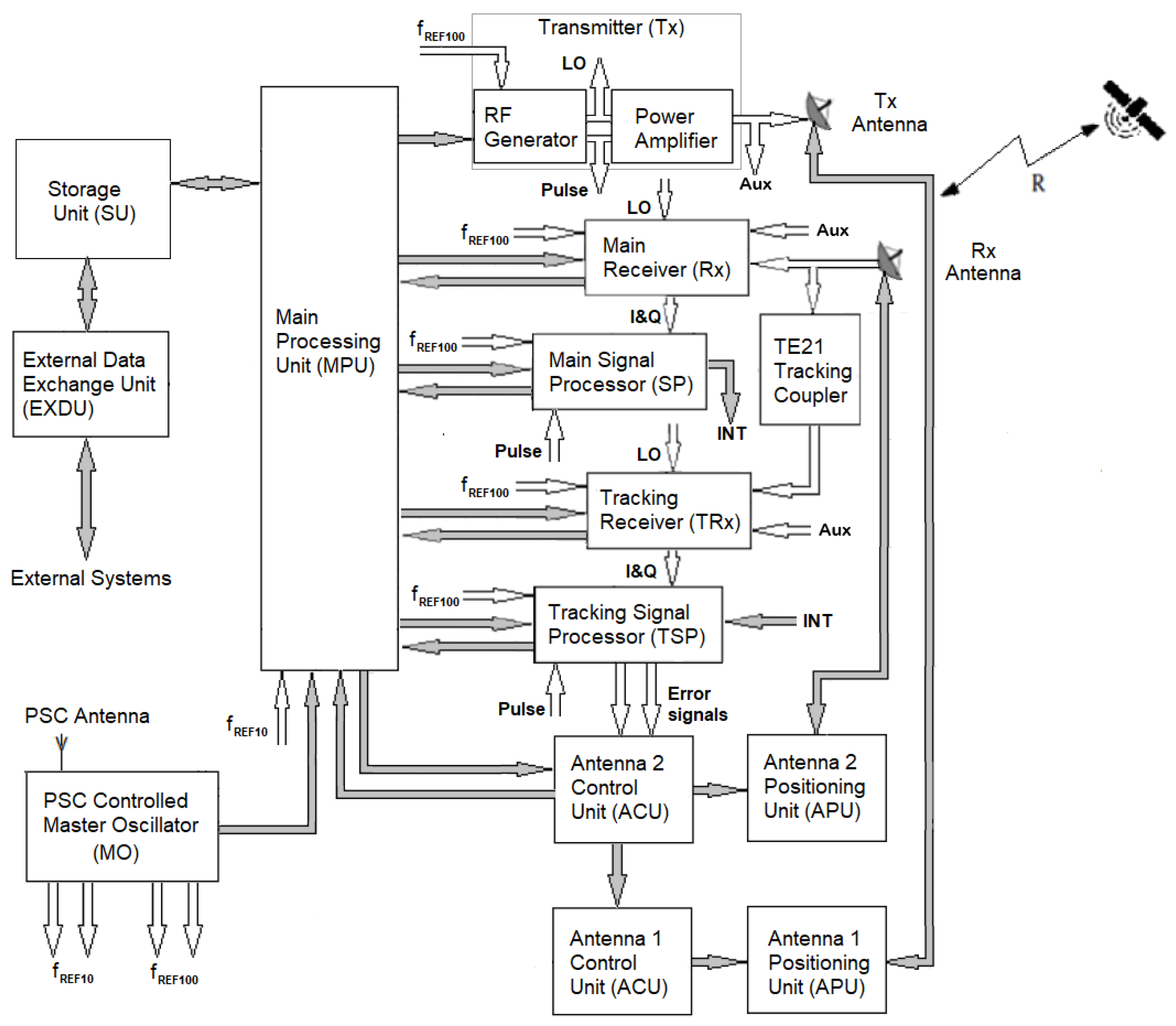
4.3. Radar Block Diagram and Operation
4.3.1. Transmitter
4.3.2. Receiver
4.3.3. Signal Processor
- Time stamps the input signal;
- Translates the input signal into the frequency domain by using a large short-time Fourier transform;
- Detects the presence of the target through a continuous false alarm rate (CFAR) algorithm;
- Processes the detected target’s frequency domain data in order to extract the target’s range, doppler, and signal-to-noise ratio (SNR).
- Time stamps the input signal;
- Translates the input signal into the frequency domain by using a large short-time Fourier transform;
- Processes the delta channel frequency domain data in order to extract the complex delta channel signal corresponding to the target;
- Uses the INT data to detect if a tracking lock condition is present and to normalize the azimuth and elevation antenna-positioning error data;
- Converts the azimuth and elevation antenna-positioning error data into analog signals, as required by the antenna 2 control unit (ACU).
4.3.4. Radar Management Unit
- The campaign preparation functions handle the tracking requests by computing the most probable trajectory of the object based on catalogue data, by determining the visibility windows of the specified objects, and by scheduling the observations.
- The operation functions set the initial data and operational parameters for each radar subsystem. Additionally, they display the tracked object’s estimated position (based on catalogue data) and the tracking errors at the end of the tracking process.
- The control functions check the full system status and perform maintenance tasks.
4.3.5. Antenna Control Unit
5. Predicted Performances
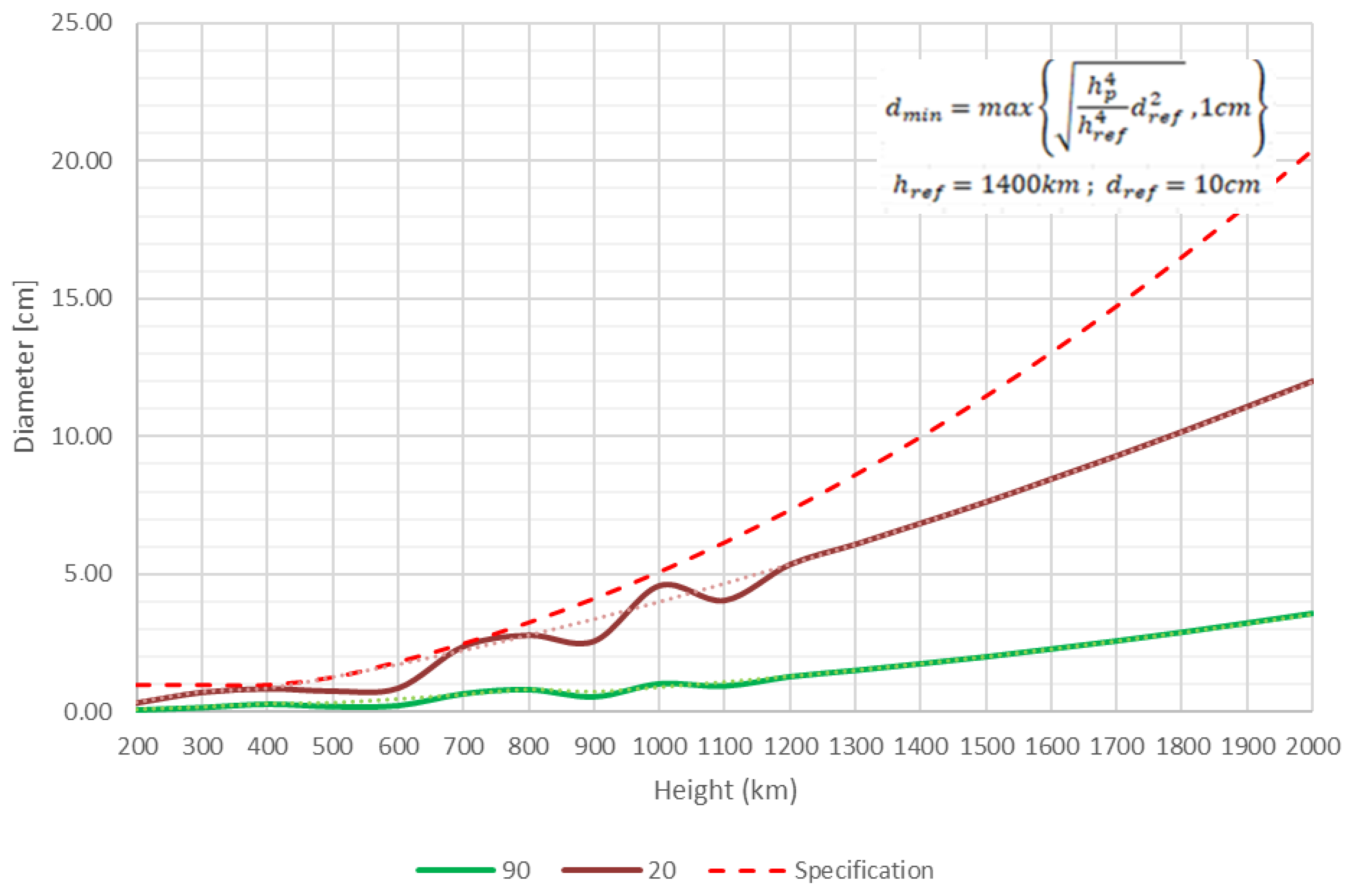
5.1. Quantity and Quality of Detectable Targets
5.2. Mean Duration of the Observed Track
- The total daily number of trackable targets was 47,068, which signified more than 98.16% of the number of passing space objects.
- For orbital altitudes between 750 and 900 km, the number of passes was 14,836, which was equivalent to 30.94% of the total number of passing space targets. From this number, 4394 were detectable distinct satellites, which represented 32% of the total number of detectable satellites.
- For orbital altitudes above 2000 km, the number of passes was 1747, which was approximately 3.65% of the total number of passing space targets.
- The highest density of trackable objects occurred at three adjacent orbital altitudes: 750 to 800 km, 800 to 850 km, and 850 to 900 km altitudes above Earth.
- For orbital altitudes from 750 to 800 km, 1471 objects had more than one passing, and only three satellites have one passing. The average and median times per passing were 1.95 min and 1.86 min.
- For orbital altitudes from 800 to 850 km, 1561 objects had more than one passing, and only one satellite had one passing. The total number of objects with two or more passings in the 800 to 850 km orbital regime was 1561, and only one satellite had one passing. The average and median times per passing were 2.25 min and 2.08 min.
- For orbital altitudes from 850 to 900 km, 1355 objects had more than one passing, and only three satellites had one passing. The average and median times per passing were 2.59 min and 2.32 min.
6. Initial Tests and Results
- The RF generator was implemented using an SMA-100B Rhode-Schwarz low-noise Microwave Generator, f = 5830–5850 MHz with a phase noise of −125 dBc/Hz and triangular linear frequency modulation that was externally synchronized by a customized GNSS-Controlled Master Oscillator manufactured by Quartzlock (United Kingdom) with an Allen frequency deviation of 5·10−12 (at 10 s) and a phase noise of −170 dBc/Hz at 10 KHz offset.
- The power amplifier had a saturation power of 5 kW. It was a custom-made low-noise SSPA manufactured by TTI Norte (Spain) [25]. This high-power SSPA was not used during the initial tests, as it was not available at that time, so the original 150 W power amplifier of the transmitting antenna was used.
- The receiver was a custom-made receiver produced by Ad-Hoc Telecom Solutions (Romania), while the signal processor was a computer featuring four high-performance 16 bit ADCs and a Tesla V100 Graphic Processing Unit (GPU); both the hardware and software were customized by Silicon Acuity (Romania) [26].
- The antenna positioning system was designed and manufactured by Antech Space (Italy) [27].
- Output power: 51 dBm (125 W). It would be increased to 67 dBm (5 kW) after installing the new SSPA;
- Frequency band: 5830–5850 MHz;
- Operating mode: CW (continuous wave);
- Modulation: triangular LFM (triangular linear frequency modulation);
- Antenna gain: 63 dBi;
- Antenna count: two (one for Tx and one for Rx);
- Receiver noise factor (FRx): 1.1 dB;
- Processing loss (LRx): 40 dB. This high value was due to the high level of the phase noise of the PA. This increased the noise threshold of the receiver through antenna coupling;
- Antenna noise temperature (Tant): 56 K;
- Detection signal-to-noise ratio (SNR): 6 dB (min).
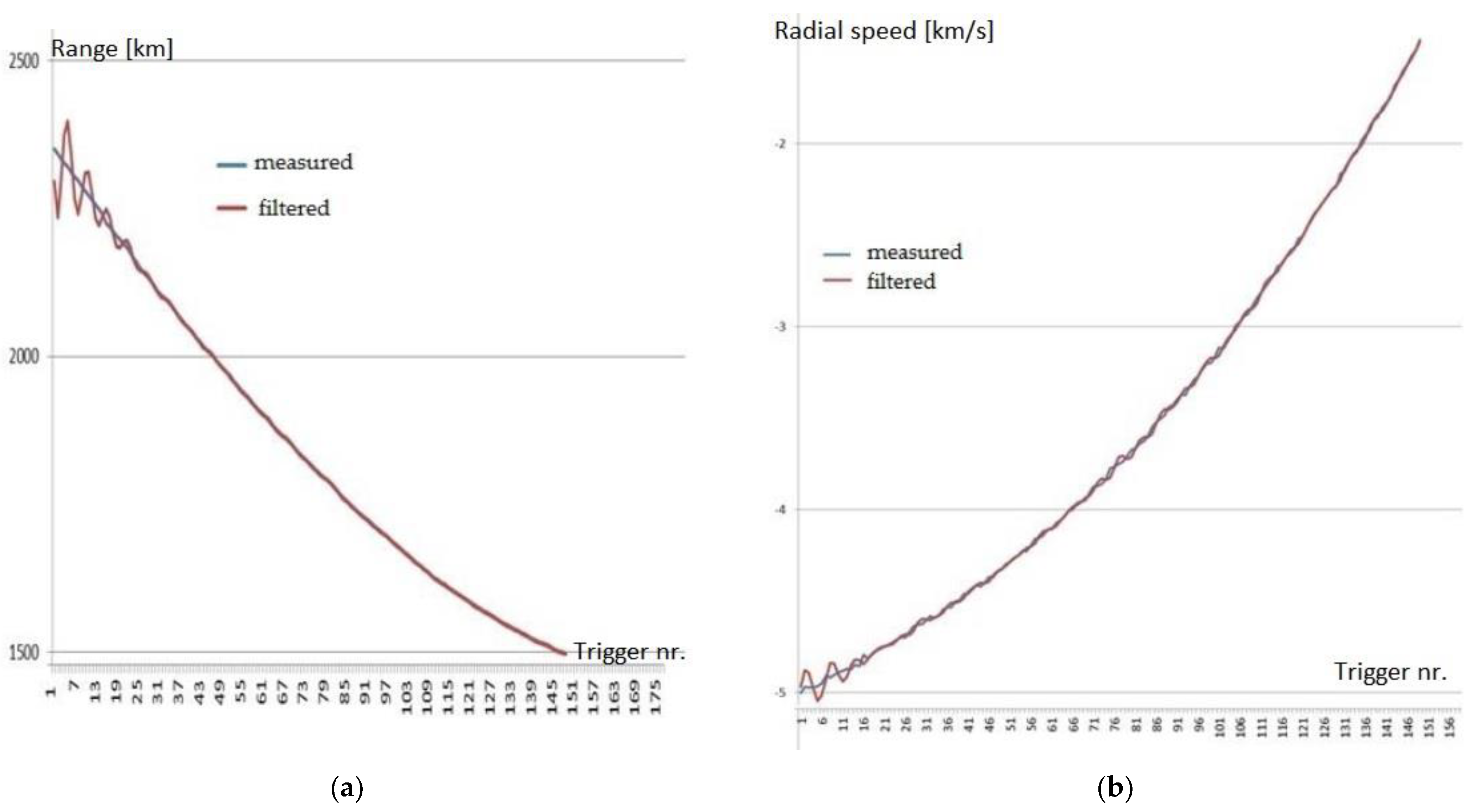
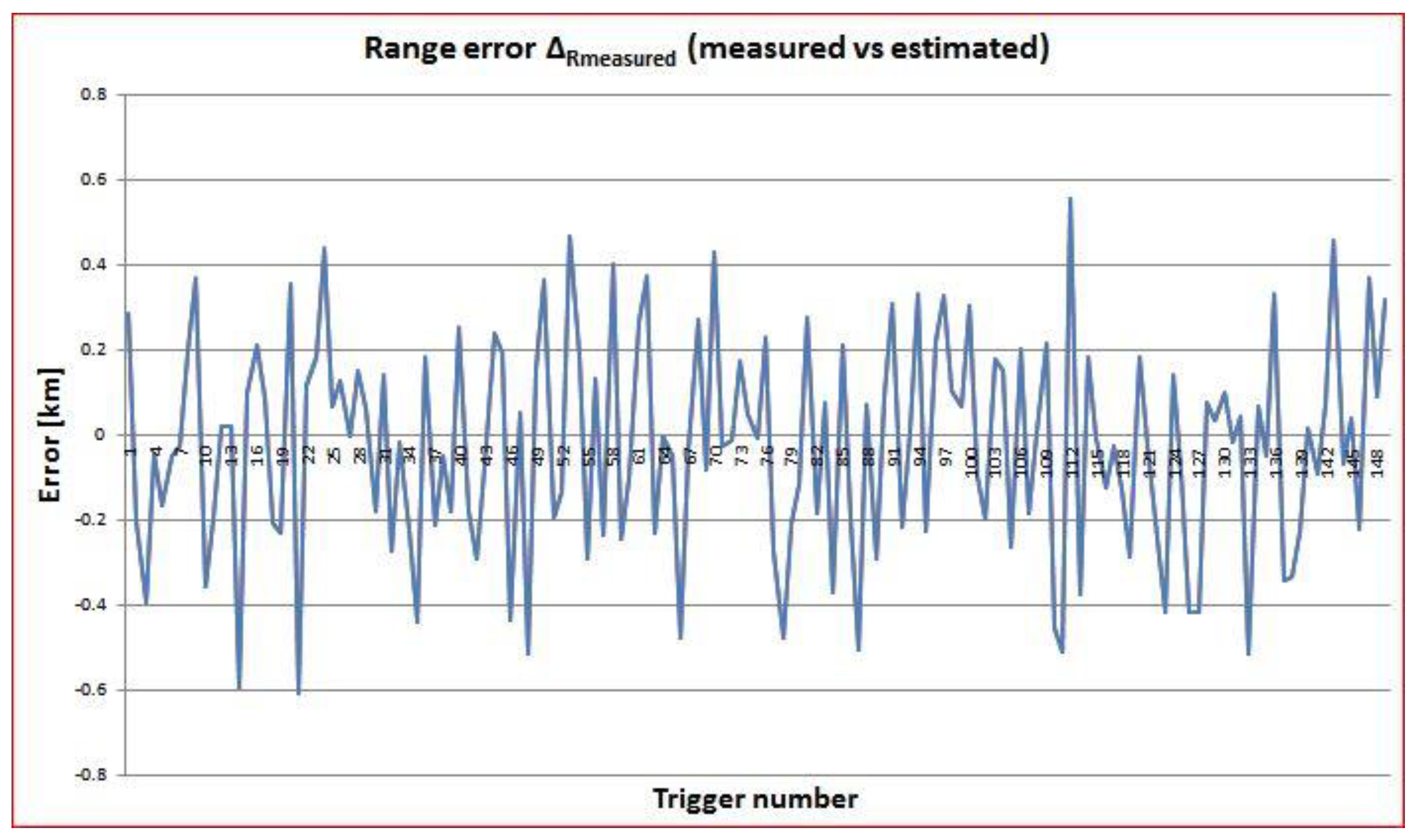
- COSMOS 2392 obsolete satellite (NORAD id 27470, International Designator 02037A) [28].
- ENVISAT obsolete satellite (NORAD id 27386, International Designator 02009A) [29].
- RADARSAT payload (NORAD id 23710, International Designator 95059A) [30].
- SS-18 R/B rocket body (NORAD id 25695, International Designator 99021C) [31].
- DELTA 1 R/B rocket body (NORAD id 13778, International Designator 83004B) [32].
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- EU Space Programme 2021–2027. Available online: https://www.consilium.europa.eu/en/policies/eu-space-programme/ (accessed on 10 January 2022).
- ESA’S Annual Space Environment Report 2021. Available online: https://www.esa.int/Safety_Security/Space_Debris/ESA_s_Space_Environment_Report_2021 (accessed on 26 February 2022).
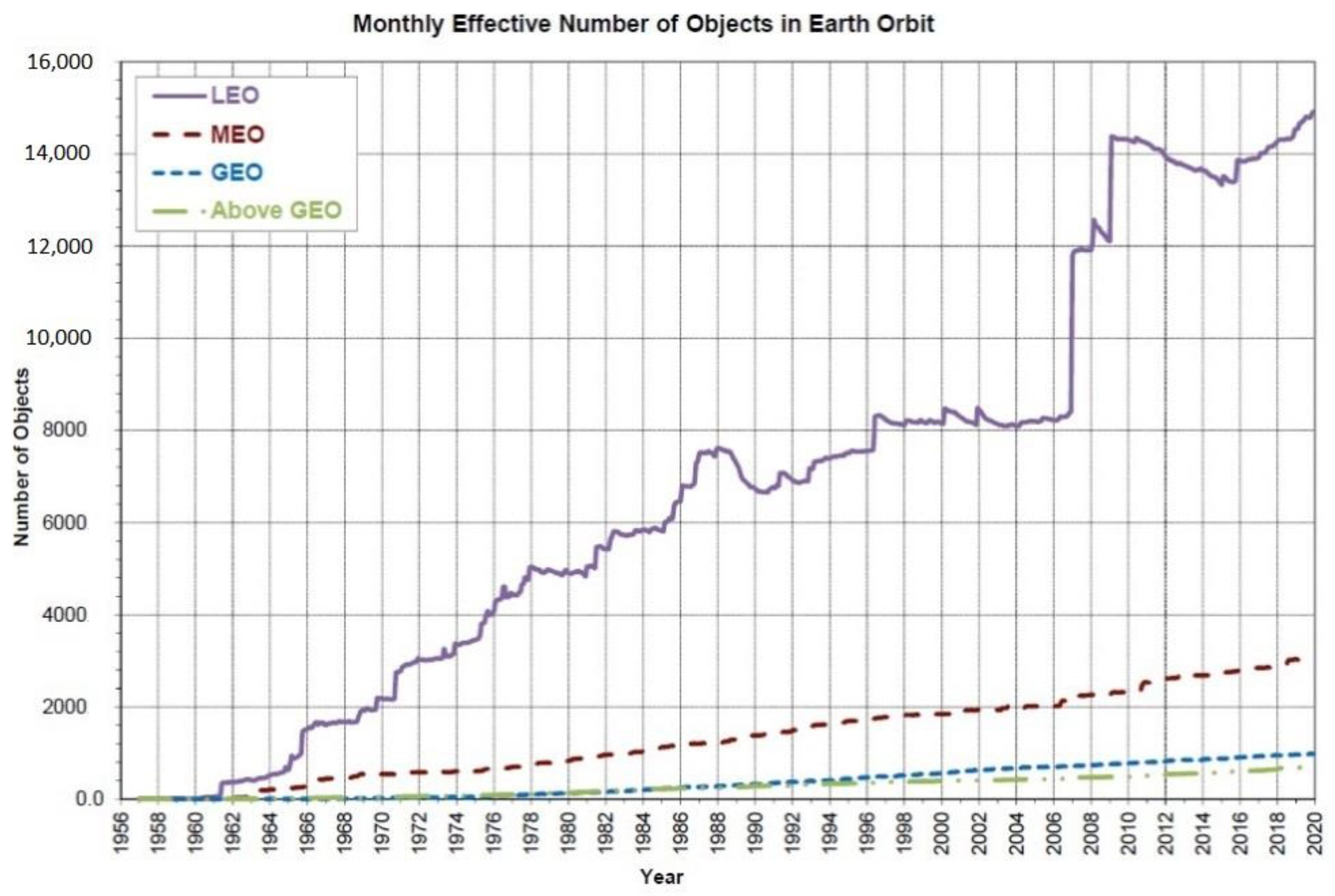
- NASA, Monthly Effective Mass of Objects in Earth Orbit, Orbital Debris Quarterly News, 24–2 (2020), pp. 10–11. Available online: https://orbitaldebris.jsc.nasa.gov/ (accessed on 10 February 2022).
- Pardini, C.; Anselmo, L. Evaluating the impact of space activities in low earth orbit. Acta Astronaut. 2021, 184, 11–22. [Google Scholar] [CrossRef]
- European Parliament and Council of the European Union. Decision No 541/2014/Eu of the European Parliament and of the Council of 16 April 2014 establishing a Framework for Space Surveillance and Tracking Support. Off. J. Eur. Union 2014, 57, 227–236. [Google Scholar]
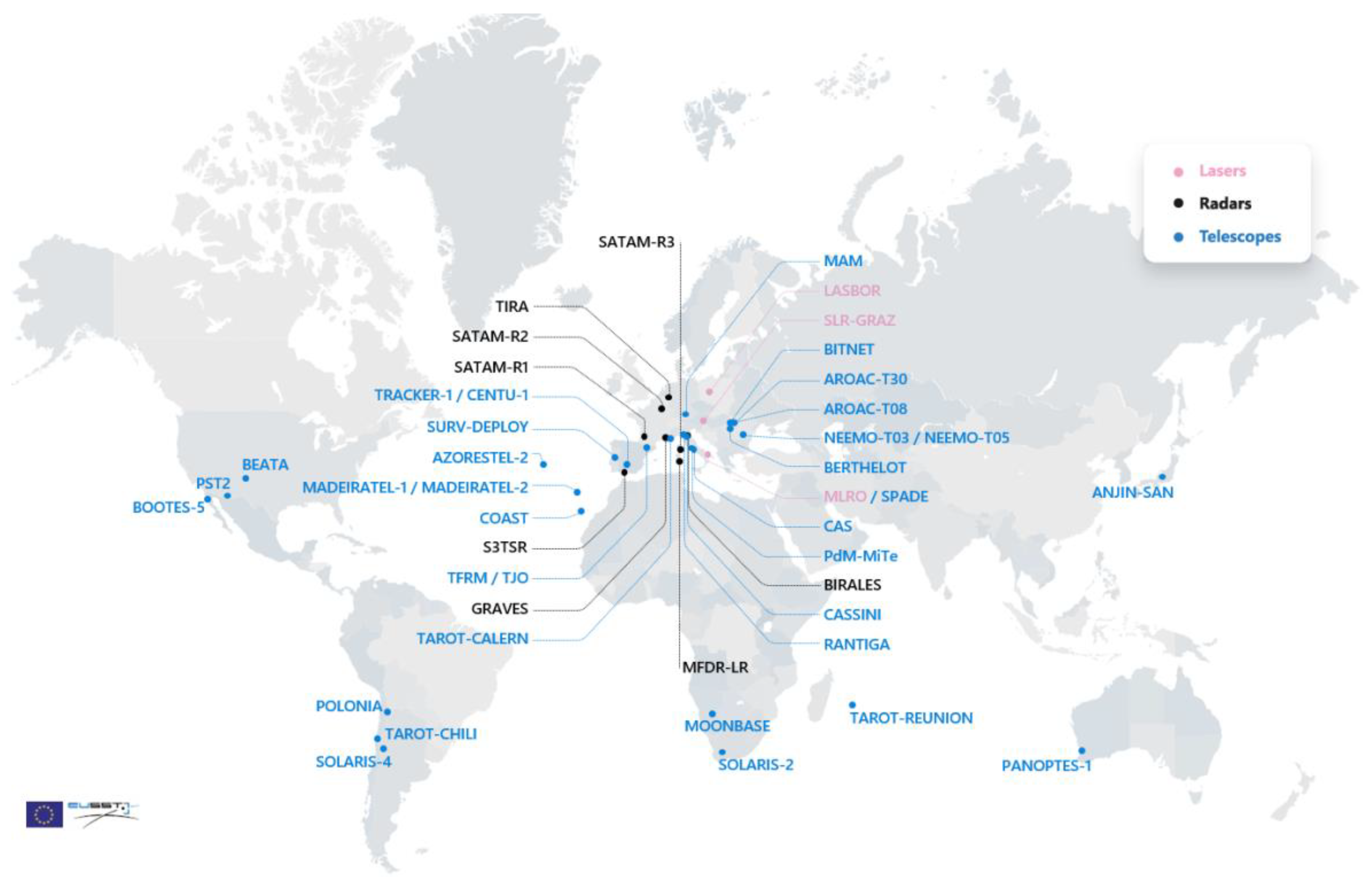
- EU SST Sensors Network, October 2021. Available online: https://www.eusst.eu/about-us/ (accessed on 20 January 2022).
- EU SST, EU Space Surveillance & Tracking: Service Portfolio. 2020. Available online: https://sst.satcen.europa.eu/ (accessed on 10 January 2022).
- Building the Future of SST, 3rd EU SST Webinar. 5 October 2021, EUSST. Available online: https://www.eusst.eu/wp-content/uploads/2021/10/3rd_EU_SST_Webinar_presentation.pdf (accessed on 12 February 2022).
- Michal, T.; Eglizeaud, J.P.; Bouchard, J. GRAVES: The New French System for Space Surveillance. In Proceedings of the 4th European Conference on Space Debris, Darmstadt, Germany, 18–20 April 2005; Volume 587, p. 61. [Google Scholar]
- Gomez, R.; Besso, P.; Pinna, G.M.; Alessandrini, M.; Salmerón, J.M.; Prada, M.A.R. Initial Operations of the Breakthrough Spanish Space Surveillance and Tracking Radar (S3TSR) in the European Context. In Proceedings of the 1st ESA NEO and Debris Detection Conference, Darmstadt, Germany, 22–24 January 2019. [Google Scholar]
- Hernández, C.P.; Prada, M.A.R.; Alessandrini, M.; Mañanes, D.C.; Siminski, J.; Pelorossi, F.; Besso, P.; Pinna, G.; Gómez, R.C.; Salmerón, J.M.; et al. Operational Review and Analysis of the S3T Surveillance Radar. In Proceedings of the 8th European Conference on Space Debris, ESA Space Debris Office, Darmstadt, Germany, 20 April 2021. [Google Scholar]
- Losacco, M.; Di Liziaa, P.; Massaria, M.; Bianchi, G.; Mattana, A.; Pupillo, G.; Bortolotti, C.; Roma, M.; Morselli, A.; Armellin, R.; et al. The Multibeam Radar Sensor BIRALES: Performance Assessment for Space Surveillance and Tracking. In Proceedings of the 7th European Conference on Space Debris, ESA Space Debris Office, Darmstadt, Germany, 18–21 April 2017. [Google Scholar]
- Pisanu, T.; Schirru, L.; Urru, E.; Gaudiomonte, F.; Ortu, P.; Bianchi, G.; Bortolotti, C.; Roma, M.; Muntoni, G.; Montisci, G.; et al. Upgrading the Italian BIRALES System to a Pulse Compression Radar for Space Debris Range Measurements. In Proceedings of the 22nd International Microwave and Radar Conference (MIKON), 2018, IEEE Xplore, Poznan, Poland,, 14–17 May 2018. [Google Scholar] [CrossRef]
- Muntoni, G.; Schirru, L.; Pisanu, T.; Montisci, G.; Valente, G.; Gaudiomonte, F.; Serra, G.; Urru, E.; Ortu, P.; Fanti, A. Space Debris Detection in Low Earth Orbit with the Sardinia Radio Telescope. Electronics 2017, 6, 59. [Google Scholar] [CrossRef] [Green Version]
- Schirru, L.; Pisanu, T.; Podda, A. The Ad Hoc Back-End of the BIRALET Radar to Measure Slant-Range and Doppler Shift of Resident Space Objects. Electronics 2021, 10, 577. [Google Scholar] [CrossRef]
- Pandeirada, J.; Bergano, M.; Neves, J.; Marques, P.; Barbosa, D.; Coelho, B.; Ribeiro, V. Development of the First Portuguese Radar Tracking Sensor for Space Debris. Signals 2021, 2, 122–137. [Google Scholar] [CrossRef]
- Cristea, O.; Turcu, V.; Cernat, M. Steps Towards a European SST System for Objects Beyond LEO Altitudes—Romanian Insights. Considerations for Space and Space-Enabled Capabilities in NATO Coalition Operations, NATO S&T Office STO-MP-SCI-283. 2016. Available online: https://www.sto.nato.int/publications/STO%20Meeting%20Proceedings/STO-MP-SCI-283/ (accessed on 20 February 2022).
- Rartel, S.A. Company Profile. Available online: https://www.rartel.ro/en/about-us/our-company (accessed on 20 February 2022).
- Ionescu, I.; Scagnoli, R.; Istriteanu, D.; Turcu, V. Cheia Antennas Retrofit to a Space Tracking Radar. In Proceedings of the European Space Agency 1st NEO and Debris Detection Conference NEOSST1, Darmstadt, Germany, 22–24 January 2019; Available online: https://conference.sdo.esoc.esa.int/proceedings/neosst1/paper/415/NEOSST1-paper415.pdf (accessed on 20 February 2022).
- Krag, H.; Klinkrad, H.; Flohrer, T.; Fletcher, E.; Bobrinsky, N. The European Space Surveillance System–Required Performance and Design Concepts. In Proceedings of the 8th US/Russian Space Surveillance Workshop, Space Surveillance Detecting and Tracking Innovation, Maui, HI, USA, 18–23 April 2010. [Google Scholar]
- Skolnik, M.L. Radar Handbook; McGraw-Hill: London, UK, 2008. [Google Scholar]
- PROOF-2009, Institute of Space Systems TU Braunschweig. Available online: http://www.space-systems.eu/index.php/de/proof (accessed on 25 February 2022).
- Wiedemann, C.; Flegel, S.; Gelhaus, J.; Möckel, M.; Klinkrad, H.; Krag, H.; Vörsmann, P. MASTER-2009. Software User Manual. European Space Agency (ESA): Darmstadt, Germany, 2011. [Google Scholar]
- Wiedemann, C.; Flegel, S.; Gelhaus, J.; Möckel, M.; Klinkrad, H.; Krag, H.; Vörsmann, P. Maintenance of the ESA MASTER Model. Final Report. European Space Agency (ESA): Darmstadt, Germany, 2011. [Google Scholar]
- TTI Develops an Ultra-High Power SSPA, TTI. Available online: https://www.ttinorte.es/tti-develops-an-ultra-high-power-sspa/ (accessed on 22 February 2022).
- Silicon Acuity. Available online: https://silicon-acuity.com/ (accessed on 25 February 2022).
- Antenna Control Unit (ACU). Available online: http://antechspace.com/index.php/products/antenna-control-units-acu/ (accessed on 25 February 2022).
- Leolabs Space Objects Catalogue. Available online: https://platform.leolabs.space/catalog/L5306 (accessed on 25 February 2022).
- Leolabs Space Objects Catalogue. Available online: https://platform.leolabs.space/catalog/L335 (accessed on 25 February 2022).
- Leolabs Space Objects Catalogue. Available online: https://platform.leolabs.space/catalog/L6085 (accessed on 25 February 2022).
- Leolabs Space Objects Catalogue. Available online: https://platform.leolabs.space/catalog/L9984 (accessed on 25 February 2022).
- Leolabs Space Objects Catalogue. Available online: https://platform.leolabs.space/catalog/L1873 (accessed on 25 February 2022).
- Bira, C.; Rusu-Casandra, A. Dataset of Spatial Objects Acquired Using Romania’s First Ground-Based Space Tracking Radar. In Proceedings of the 14th International Conference on Communications COMM 2022, Bucharest, Romania, 16–18 June 2022. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | Antenna Cheia 1 | Antenna Cheia 2 |
|---|---|---|
| Model | Intelsat Standard A Earth Station | |
| Manufacturer | Nippon Electric Co., Ltd. (NEC), Tokyo, Japan | |
| Diameter | 32 m | |
| Year of installation | 1976 | 1979 |
| Satellite originally used | Intelsat IS—905 at 335.5° E | Intelsat IS—904 at 60.0° E |
| Total weight | 309 ton | 260 ton |
| Effective gain at feed | >63 dB | >63 dB |
| Noise temperature ԑ = 20° | 37.0 | 36.5 |
| Bandwidth | 3.6–6.4 GHz | |
| Isolation between antenna sidelobes | >93 dB | |
| Polarization | Dual circular | |
| Polarization isolation | 30 dB | |
| Azimuth scanning domain | −170° to +170° relative S | |
| Elevation scanning domain | 0°–92° | |
| Tracking speed | 0.3°/s | |
| Object | Estimated RCS (m2) | Range Min (km) | Range Max (km) | Lowest Radial Speed (km/s) | Highest Radial Speed (km/s) |
|---|---|---|---|---|---|
| COSMOS2932 | 8.31 | 1496 | 2351 | −1.43 | −5.00 |
| ENVISAT | 19.49 | 818 | 2030 | −0.45 | −6.48 |
| RADARSAT | 3.62 | 849 | 2136 | −1.42 | −6.47 |
| SS-18 R/B | 9.18 | 966 | 2177 | 0 | −6.09 |
| DELTA 1 R/B | 8.91 | 1108 | 2142 | 0 | 5.96 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ionescu, L.; Rusu-Casandra, A.; Bira, C.; Tatomirescu, A.; Tramandan, I.; Scagnoli, R.; Istriteanu, D.; Popa, A.-E. Development of the Romanian Radar Sensor for Space Surveillance and Tracking Activities. Sensors 2022, 22, 3546. https://doi.org/10.3390/s22093546
Ionescu L, Rusu-Casandra A, Bira C, Tatomirescu A, Tramandan I, Scagnoli R, Istriteanu D, Popa A-E. Development of the Romanian Radar Sensor for Space Surveillance and Tracking Activities. Sensors. 2022; 22(9):3546. https://doi.org/10.3390/s22093546
Chicago/Turabian StyleIonescu, Liviu, Alexandru Rusu-Casandra, Calin Bira, Alexandru Tatomirescu, Ionut Tramandan, Roberto Scagnoli, Dan Istriteanu, and Andrei-Edward Popa. 2022. "Development of the Romanian Radar Sensor for Space Surveillance and Tracking Activities" Sensors 22, no. 9: 3546. https://doi.org/10.3390/s22093546
APA StyleIonescu, L., Rusu-Casandra, A., Bira, C., Tatomirescu, A., Tramandan, I., Scagnoli, R., Istriteanu, D., & Popa, A. -E. (2022). Development of the Romanian Radar Sensor for Space Surveillance and Tracking Activities. Sensors, 22(9), 3546. https://doi.org/10.3390/s22093546