
Analysis of Data Reception in the Communication Layer Applied to an Architecture of Mobile Sensor Networks in Marine Environments
 , and
, and
Abstract
:1. Introduction
- Validation of a sensor network architecture to be implemented in marine environments;
- Validation of low-frequency data reception, which is useful in marine environments;
- Verification of the viability of the two proposed types of communication in the smart sensor architecture.
2. Materials and Methods
2.1. Architecture of the Sensor Network
2.2. Characterization of the Data Reception of the Communication Layer for a Sensor Network for Aquatic Environments
2.2.1. Characterization of Data Reception between the Mobile Nodes and the Static Node
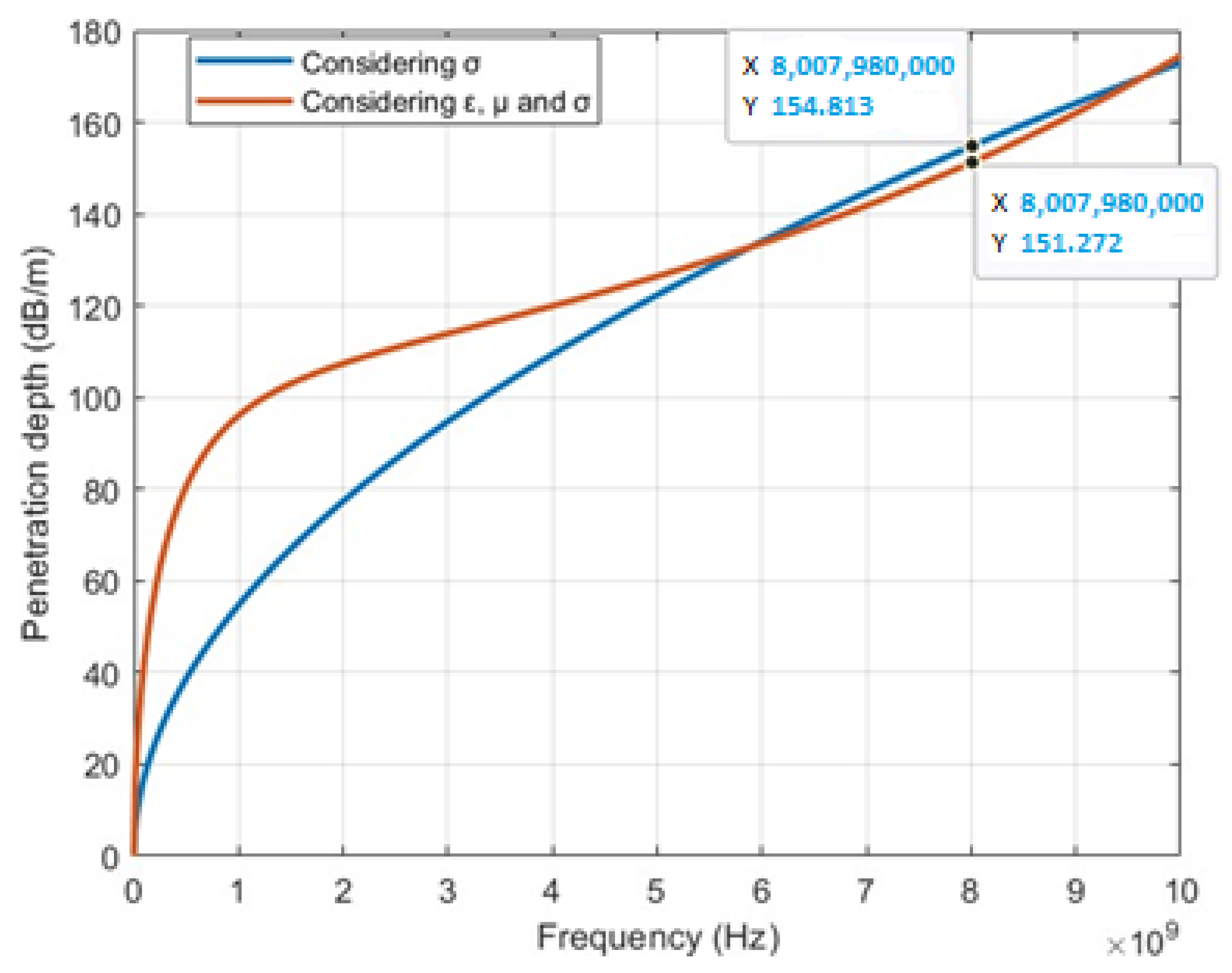
| Algorithm 1. Algorithm to determine the depth range for data reception in a saltwater environment. |
| Data: sample frequencies medium conductivity medium permeability permittivity of the medium penetration depth considering penetration depth considering , and begin For the penetration depth considering for k = 0:1: ( maximum value of ) do end for For the penetration depth considering and for k = 0:1: do end for end |
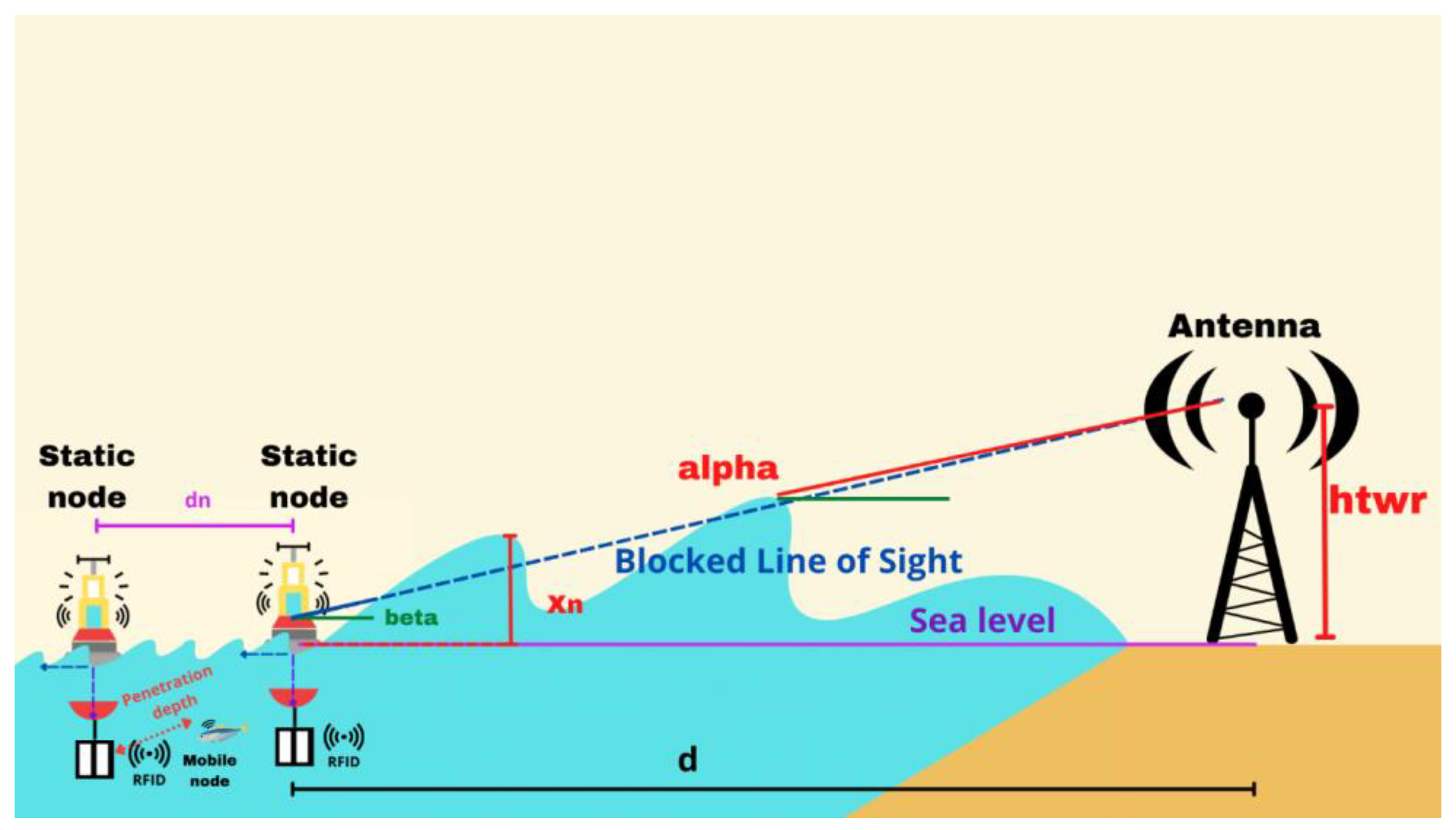
2.2.2. Characterization of Data Reception between Static Nodes and the Terrestrial Antenna
| Algorithm 2. Algorithm to determine the occurrence of data reception between the static nodes and the antenna. |
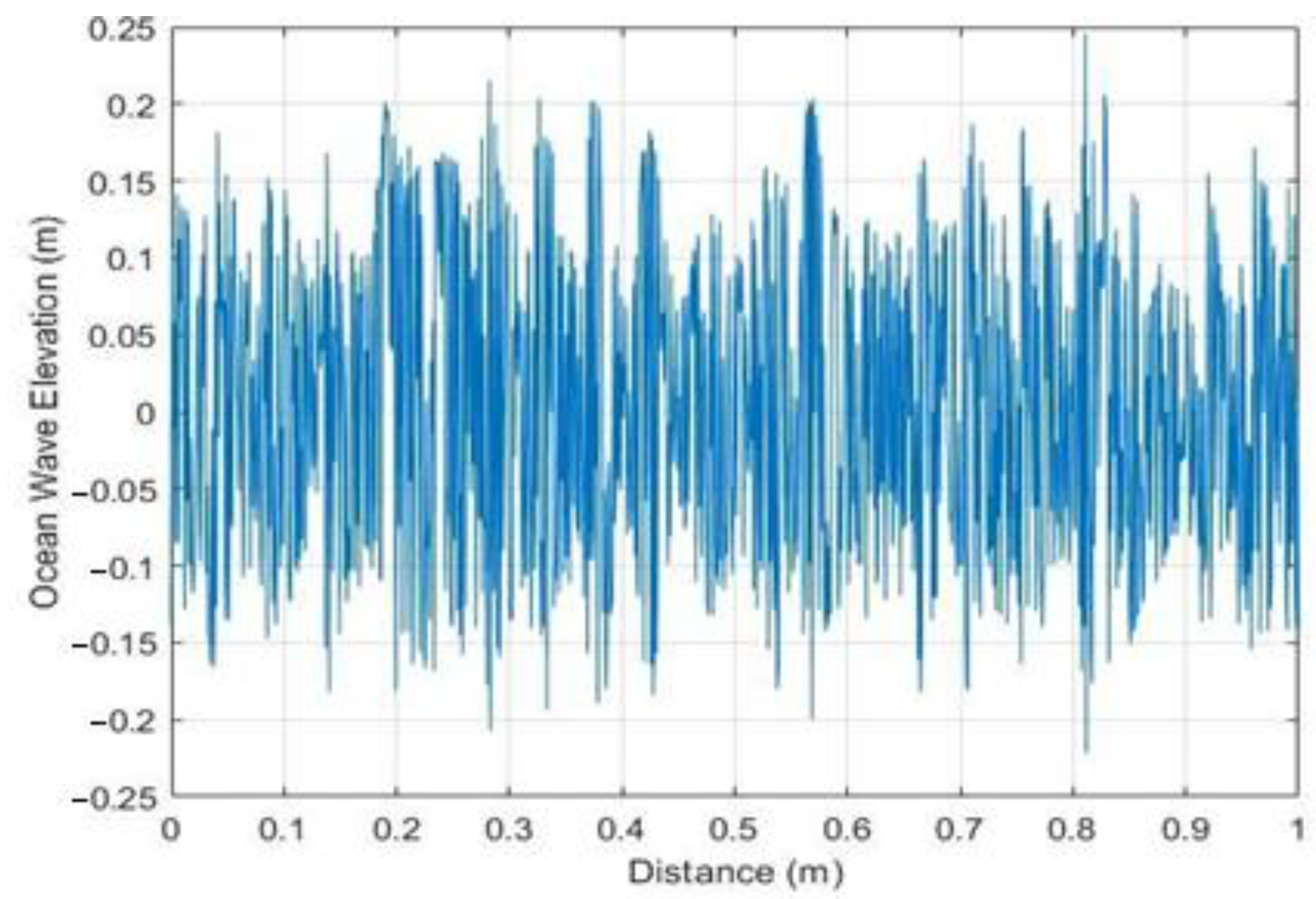
| Data: significant wave height peak period terrestrial antenna height node antenna height distance between antenna and node number of random realizations begin Generate wave number for each frequency component set ; ; while do for Find the blocker at the current time instance for do if then The distance and height of the blocker landing are saved to be subtracted from the component number. end if end for end for Regenerate a set of realizations of and random end while end |
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kalantar-Zadeh, K. Sensors: An Introductory Course; Springer Science & Business Media: Melbourne, Australia, 2013; pp. 1–6. [Google Scholar]
- Gokhale, P.; Bhat, O.; Bhat, S. Introduction to IoT. Int. Adv. Res. J. Sci. Eng. Technol. 2018, 5, 41–44. [Google Scholar]
- Yurish, S.Y. Sensors: Smart vs. intelligent. Sens. Transducers 2010, 114, I–VI. [Google Scholar]
- Nóbrega, L.; Tavares, A.; Cardoso, A.; Gonçalves, P. Animal monitoring based on IoT technologies. In Proceedings of the 2018 IoT Vertical and Topical Summit on Agriculture IEEE, Tuscany, Italy, 8–9 May 2018; pp. 1–5. [Google Scholar]
- Domingo, M.C. An overview of the internet of underwater things. J. Netw. Comput. Appl. 2012, 35, 1879–1890. [Google Scholar] [CrossRef]
- Sanchez, P.J.B.; Márquez, F.P.G.; Govindara, S.; But, A.; Sportich, B.; Marini, S.; Papaelias, M. Use of UIoT for offshore surveys through autonomous vehicles. Pol. Marit. Res. 2021, 28, 175–189. [Google Scholar] [CrossRef]
- Guang, X.; Liu, C.; Qu, W.; Zhao, Z. Dynamic data collection algorithm based on mobile edge computing in underwater internet of things. J. Cloud Comput. 2023, 12, 46. [Google Scholar] [CrossRef]
- Nayyar, A.; Ba, C.H.; Duc, N.P.C.; Binh, H.D. Smart-IoUT 1.0: A smart aquatic monitoring network based on Internet of Underwater Things (IoUT). In Proceedings of the International Conference on Industrial Networks and Intelligent Systems, Da Nang, Vietnam, 27–28 August 2018; pp. 191–207. [Google Scholar]
- Qiu, T.; Zhao, Z.; Zhang, T.; Chen, C.; Chen, C.P. Underwater Internet of Things in Smart Ocean: System architecture and open issues. IEEE Trans. Ind. Inform. 2019, 16, 4297–4307. [Google Scholar] [CrossRef]
- Huo, Y.; Dong, X.; Beatty, S. Cellular communications in ocean waves for maritime internet of things. IEEE Internet Things J. 2020, 7, 9965–9979. [Google Scholar] [CrossRef] [Green Version]
- Hungría, E.M. La protección de la biodiversidad marina frente al ruido subacuático: ¿es necesario incorporar valores umbral? Rev. Esc. Jacobea Posgrado 2020, 19, 73–96. [Google Scholar]
- Mooney, T.A.; Nachtigall, P.E.; Vlachos, S. Sonar-induced temporary hearing loss in dolphins. Biol. Lett. 2009, 5, 565–567. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Peres, C.; Pigeon, M.; Rather, N.; Gawade, D.R.; Buckley, J.; Jafarzadeh, H.; O’Flynn, B. Theoretical models for underwater RFID and the impact of water salinity on the design of wireless systems. Int. J. Adv. Netw. Serv. 2020, 13, 45–59. [Google Scholar]
- Sathappan, N.; Tokhi, M.O.; Zhao, Z.; Duan, F.; Shirkoohi, G.; Penaluna, L. Underwater GMR sensor data storage using RFID tags. In Proceedings of the 2022 Prognostics and Health Management Conference, London, UK, 27–29 May 2022; pp. 158–161. [Google Scholar]
- Wei, D.; Yan, L.; Huang, C.; Wang, J.; Chen, J.; Pan, M.; Fang, Y. Dynamic magnetic induction wireless communications for autonomous-underwater-vehicle-assisted underwater IoT. IEEE Internet Things J. 2020, 7, 9834–9845. [Google Scholar] [CrossRef]
- ISO. Available online: https://www.iso.org/obp/ui/#iso:std:iso:11784:ed-2:v1:en (accessed on 13 April 2023).
- Benelli, G.; Pozzebon, A. RFID Under Water: Technical Issues and Applications. In Radio Frequency Identification from System to Applications; InTech, Reaz, M.B.I.: Rijeka, Croatia, 2013; pp. 379–395. [Google Scholar]
- Benson, B.; Li, Y.; Kastner, R.; Faunce, B.; Domond, K.; Kimball, D.; Schurgers, C. Design of a low-cost, underwater acoustic modem for short-range sensor networks. In Proceedings of the OCEANS’10 IEEE SYDNEY, Sydney, Australia, 24–27 May 2010; pp. 1–9. [Google Scholar]
- Uribe, C.; Grote, W. Radio communication model for underwater wsn. In Proceedings of the 2009 3rd International Conference on New Technologies, Mobility and Security, Cairo, Egypt, 20–23 December 2009; pp. 1–5. [Google Scholar]
- Jiang, S.; Georgakopoulos, S. Electromagnetic wave propagation into freshwater. J. Electromagn. Anal. Appl. 2011, 3, 261–266. [Google Scholar]
- Eagle. Available online: https://ww2.eagle.org/content/dam/eagle/rules-and-guides/current/offshore/238_Guidance_Notes_on_Selecting_Design_Wave_by_Long_Term_Stochastic_Method/Long_Term_Design_Wave_GN_e.pdf (accessed on 28 February 2023).
- Beatty, S. Analysis and Development of a Three Body Heaving Wave Energy Converter. Master’s Thesis, University of Victoria, Victoria, BC, Canada, 1 May 2009. [Google Scholar]
- Holthuijsen, L.H. Description of ocean waves. In Waves in Oceanic and Coastal Waters, 1st ed.; Smith, J., Ed.; Cambridge University Press: New York, NY, USA, 2007; pp. 24–55. [Google Scholar]
- Matheus, F.K.; Frank, P.M.; Marcelo, F.B.; Thomas, G.C. RFID wireless system for detection of water in the annulus of a flexible pipe. Mar. Struct. 2020, 72, 102776. [Google Scholar] [CrossRef]
- OCSE. Available online: http://ocse.mx/es/experimento/boyas-de-oleaje-corrientes/resultados?utf8=%E2%9C%93&spotter_id=SPOT-0113&variable=significant_wave_height&start_date=02%2F24%2F2022&end_date=02%2F24%2F2022 (accessed on 10 May 2022).
- ITU. Available online: https://www.itu.int/dms_pubrec/itu-r/rec/p/R-REC-P.527-5-201908-S!!PDF-S.pdf (accessed on 13 April 2023).
- Pallares-Calvo, A.E.; Carvajal-Gámez, B.E.; Gutiérrez-Frías, O.O. Characterization of an RFID reader in saltwater. In Proceedings of the Multimodal Sensing and Artificial Intelligence: Technologies and Applications II, Online, Germany, 21–25 June 2021. [Google Scholar]
- Akyildiz, I.F.; Wang, P.; Sun, Z. Realizing underwater communication through magnetic induction. IEEE Commun. Mag. 2015, 53, 42–48. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Significant_ Wave_Height | Peak_ Period | Mean_ Period | Measured_at | Lat | Updated_at |
|---|---|---|---|---|---|---|
| 2802 | 0.8 | 34.12 | 18.7 | 20 March 2019 22:50:52 UTC | 21.1646 | 20 March 2019 23:21:48 UTC |
| 2803 | 0.25 | 10.24 | 11 | 20 March 2019 23:20:52 UTC | 21.1646 | 20 March 2019 23:21:48 UTC |
| 2806 | 0.39 | 25.6 | 13.36 | 20 March 2019 23:50:57 UTC | 21.1646 | 21 March 2019 01:25:36 UTC |
| 2807 | 0.62 | 34.12 | 15.08 | 21 March 2019 00:20:57 UTC | 21.1646 | 21 March 2019 01:25:36 UTC |
| 2804 | 0.71 | 25.6 | 13.56 | 21 March 2019 00:51:03 UTC | 21.1645 | 21 March 2019 01:24:43 UTC |
| 2805 | 0.77 | 20.48 | 14.96 | 21 March 2019 01:21:03 UTC | 21.1646 | 21 March 2019 01:24:43 UTC |
| 2808 | 0.65 | 25.6 | 14.68 | 21 March 2019 01:51:08 UTC | 21.1646 | 21 March 2019 02:45:25 UTC |
| 2809 | 0.6 | 34.12 | 15.16 | 21 March 2019 02:21:08 UTC | 21.1646 | 21 March 2019 02:45:25 UTC |
| 2810 | 0.98 | 25.6 | 17.08 | 21 March 2019 02:51:14 UTC | 21.1646 | 21 March 2019 03:22:52 UTC |
| 2811 | 0.85 | 34.12 | 17.54 | 21 March 2019 03:21:14 UTC | 21.1646 | 21 March 2019 03:22:52 UTC |
| 2812 | 0.66 | 25.6 | 14.68 | 21 March 2019 03:51:19 UTC | 21.1645 | 21 March 2019 04:49:14 UTC |
| 2813 | 0.48 | 25.6 | 17.12 | 21 March 2019 04:21:19 UTC | 21.1646 | 21 March 2019 04:49:14 UTC |
| 2814 | 0.71 | 34.12 | 18.92 | 21 March 2019 04:51:24 UTC | 21.1646 | 21 March 2019 05:27:23 UTC |
| 2815 | 0.65 | 34.12 | 16.14 | 21 March 2019 05:21:24 UTC | 21.1646 | 21 March 2019 05:27:23 UTC |
| 2816 | 0.52 | 25.6 | 13.84 | 21 March 2019 05:51:30 UTC | 21.1646 | 21 March 2019 06:52:52 UTC |
| 2817 | 0.52 | 10.24 | 11.66 | 21 March 2019 06:21:30 UTC | 21.1646 | 21 March 2019 06:52:52 UTC |
| 2818 | 0.64 | 10.24 | 10.44 | 21 March 2019 06:51:36 UTC | 21.1646 | 21 March 2019 07:32:20 UTC |
| 2819 | 0.71 | 10.24 | 12.72 | 21 March 2019 07:21:36 UTC | 21.1646 | 21 March 2019 07:32:20 UTC |
| 2820 | 0.78 | 34.12 | 15.8 | 21 March 2019 07:51:41 UTC | 21.1646 | 21 March 2019 08:57:51 UTC |
| 2821 | 1.17 | 34.12 | 19.56 | 21 March 2019 08:21:41 UTC | 21.1646 | 21 March 2019 08:57:52 UTC |
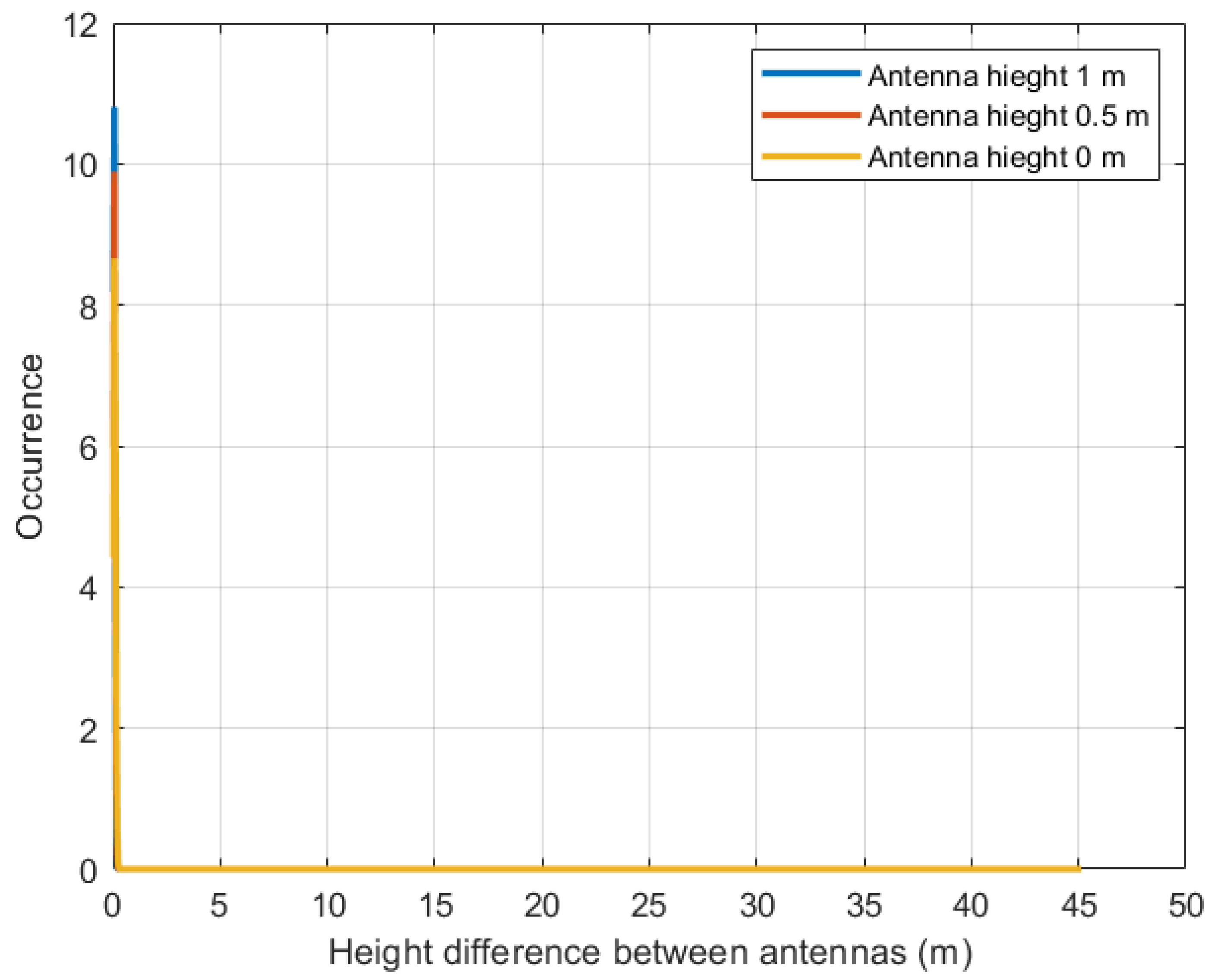
| Antenna Height of the Node (m) | Range of Difference between Antennas (m) | Probability (%) |
|---|---|---|
| 0 | 0 to 0.2886 | 54.2 |
| 0.5 | 0 to 0.2573 | 70.6 |
| 1 | 0 to 0.2362 | 94.5 |
| Antenna Height of the Node (m) | Range of Difference between Antennas (m) | Probability (%) |
|---|---|---|
| 0 | 0 to 0.3389 | 98.1 |
| 0.5 | 0 to 0.2968 | 99.2 |
| 1 | 0 to 0.2463 | 100 |
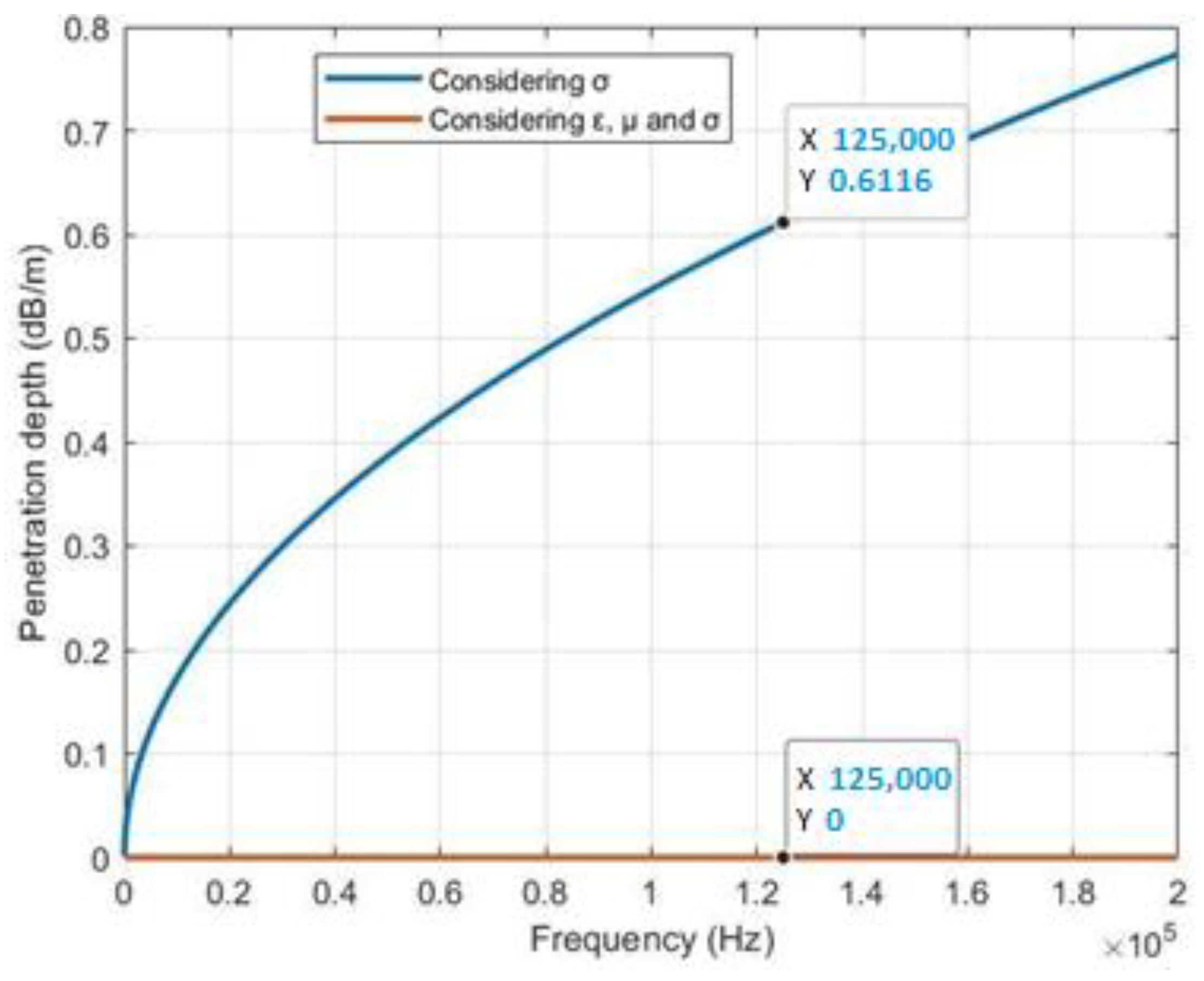
| Work | This Paper | [7] | [8] | [11] | [12] | [13] |
|---|---|---|---|---|---|---|
| Propagation method | MI | MI, acoustic, EM, optical | EM | MI | MI | MI |
| Transmission frequency (kHz) | 125 | No data | 110 | |||
| Penetration depth (dB/m) | 0.6116 | Only proposal | 0.5 to 0.02 | No data | 0.0683 | No data |
| Underwater data reception | YES | Only proposal | No data | YES | YES | YES |
| Sea surface data reception | YES | Only proposal | YES | NO | NO | NO |
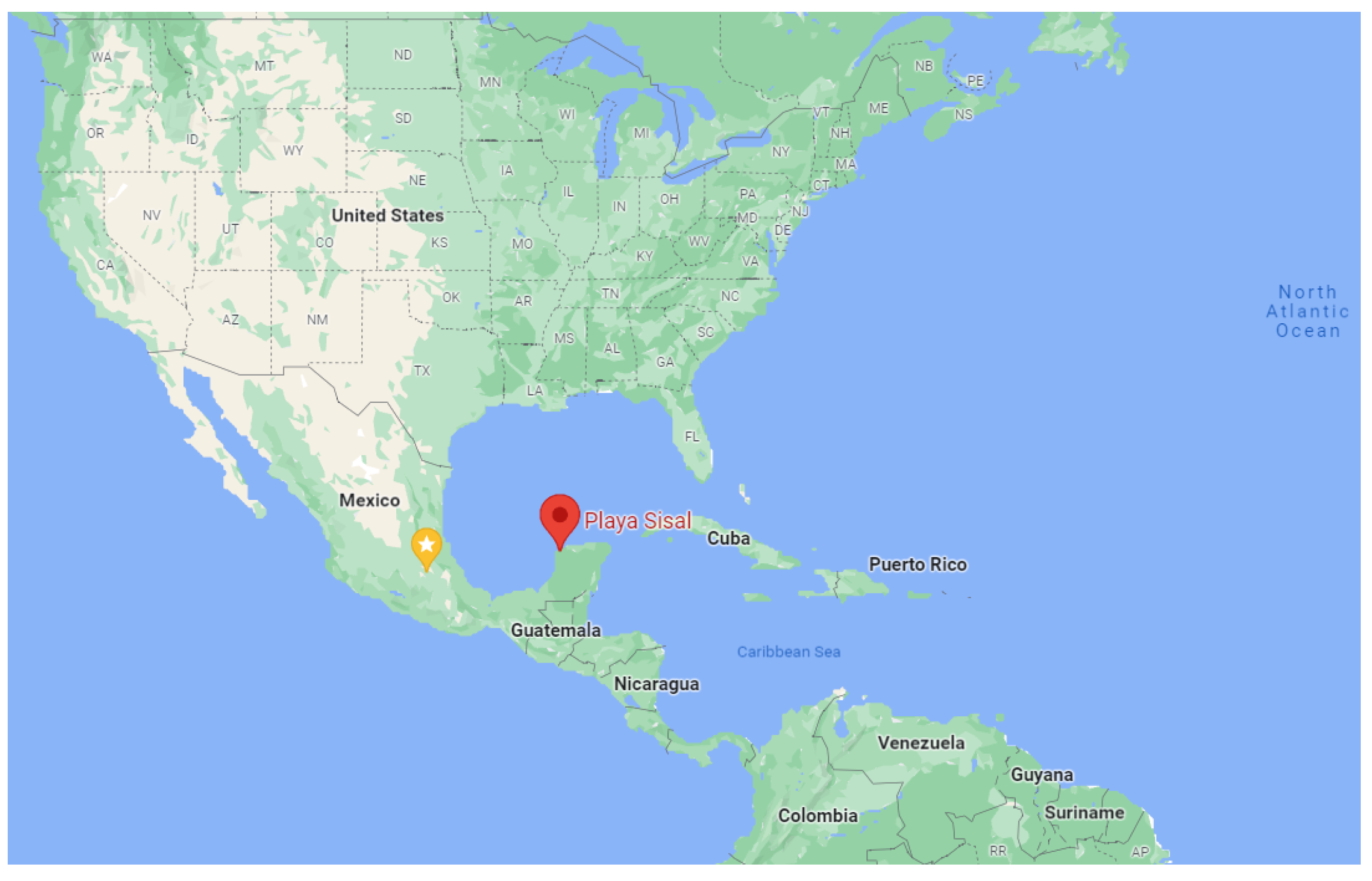
| Public database wave sample | Sisal Beach Yucatan Mexico | No database | Controlled scenario database | No database | No database | No database |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pallares-Calvo, A.E.; Carvajal-Gámez, B.E.; Gutiérrez-Frías, O.; Mujica-Vargas, D. Analysis of Data Reception in the Communication Layer Applied to an Architecture of Mobile Sensor Networks in Marine Environments. Sensors 2023, 23, 5480. https://doi.org/10.3390/s23125480
Pallares-Calvo AE, Carvajal-Gámez BE, Gutiérrez-Frías O, Mujica-Vargas D. Analysis of Data Reception in the Communication Layer Applied to an Architecture of Mobile Sensor Networks in Marine Environments. Sensors. 2023; 23(12):5480. https://doi.org/10.3390/s23125480
Chicago/Turabian StylePallares-Calvo, Abigail Elizabeth, Blanca Esther Carvajal-Gámez, Octavio Gutiérrez-Frías, and Dante Mujica-Vargas. 2023. "Analysis of Data Reception in the Communication Layer Applied to an Architecture of Mobile Sensor Networks in Marine Environments" Sensors 23, no. 12: 5480. https://doi.org/10.3390/s23125480
APA StylePallares-Calvo, A. E., Carvajal-Gámez, B. E., Gutiérrez-Frías, O., & Mujica-Vargas, D. (2023). Analysis of Data Reception in the Communication Layer Applied to an Architecture of Mobile Sensor Networks in Marine Environments. Sensors, 23(12), 5480. https://doi.org/10.3390/s23125480