
Review of Three-Dimensional Handheld Photoacoustic and Ultrasound Imaging Systems and Their Applications




Abstract
:1. Introduction
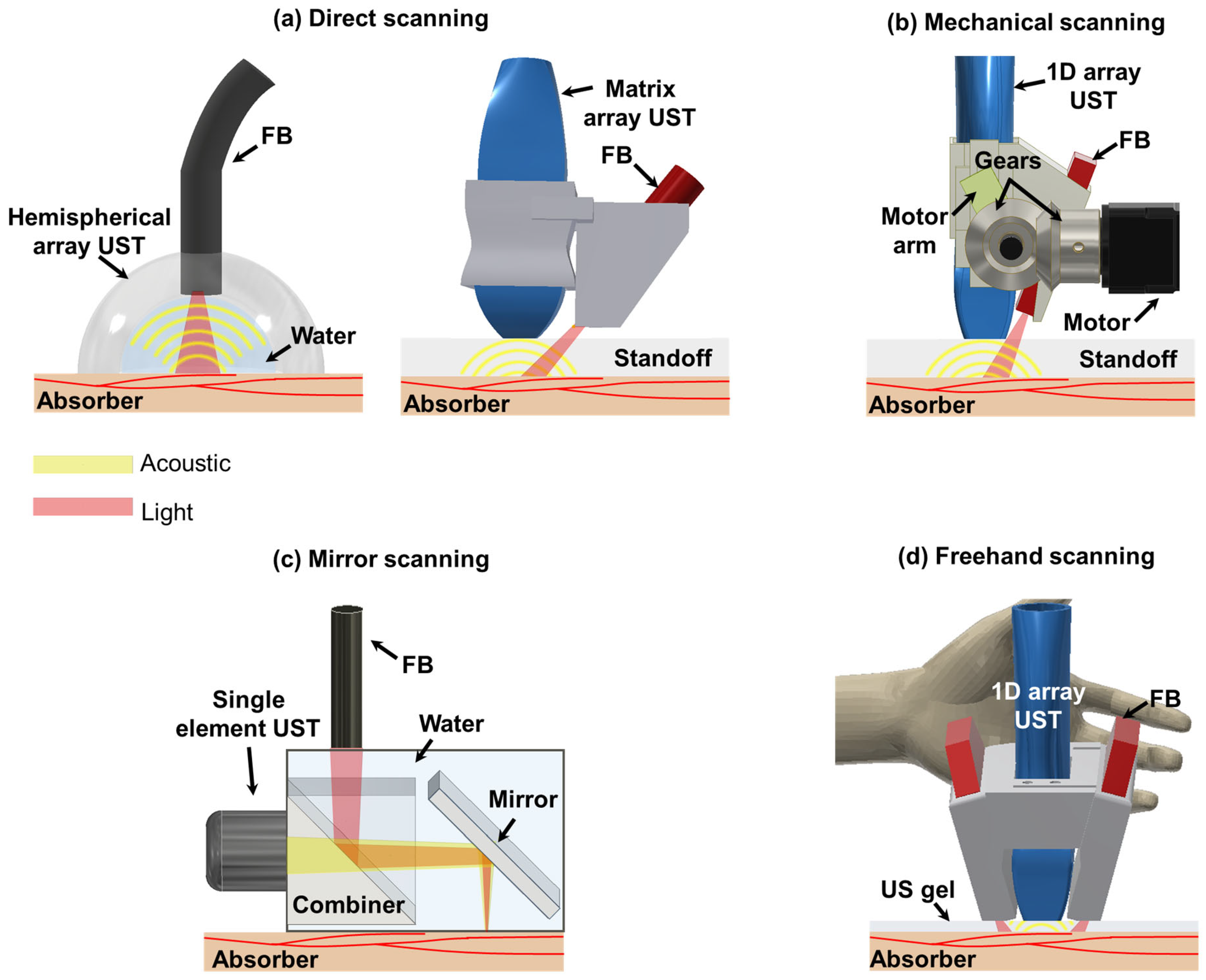
2. Classification of 3D Handheld PA Imaging Systems into Four Scanning Techniques
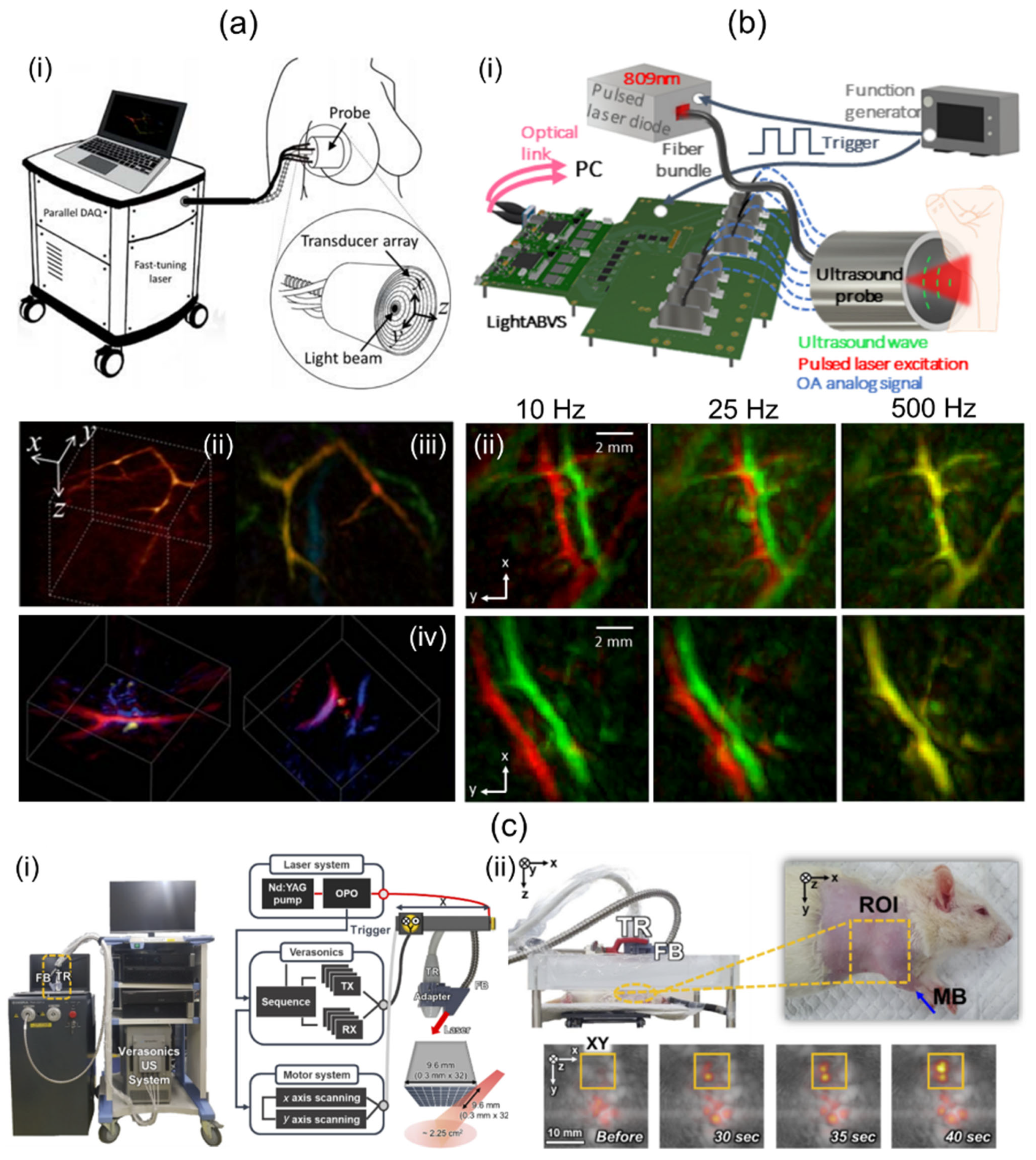
2.1. Three-Dimensional Handheld PA Imaging Systems Using Direct Scanning
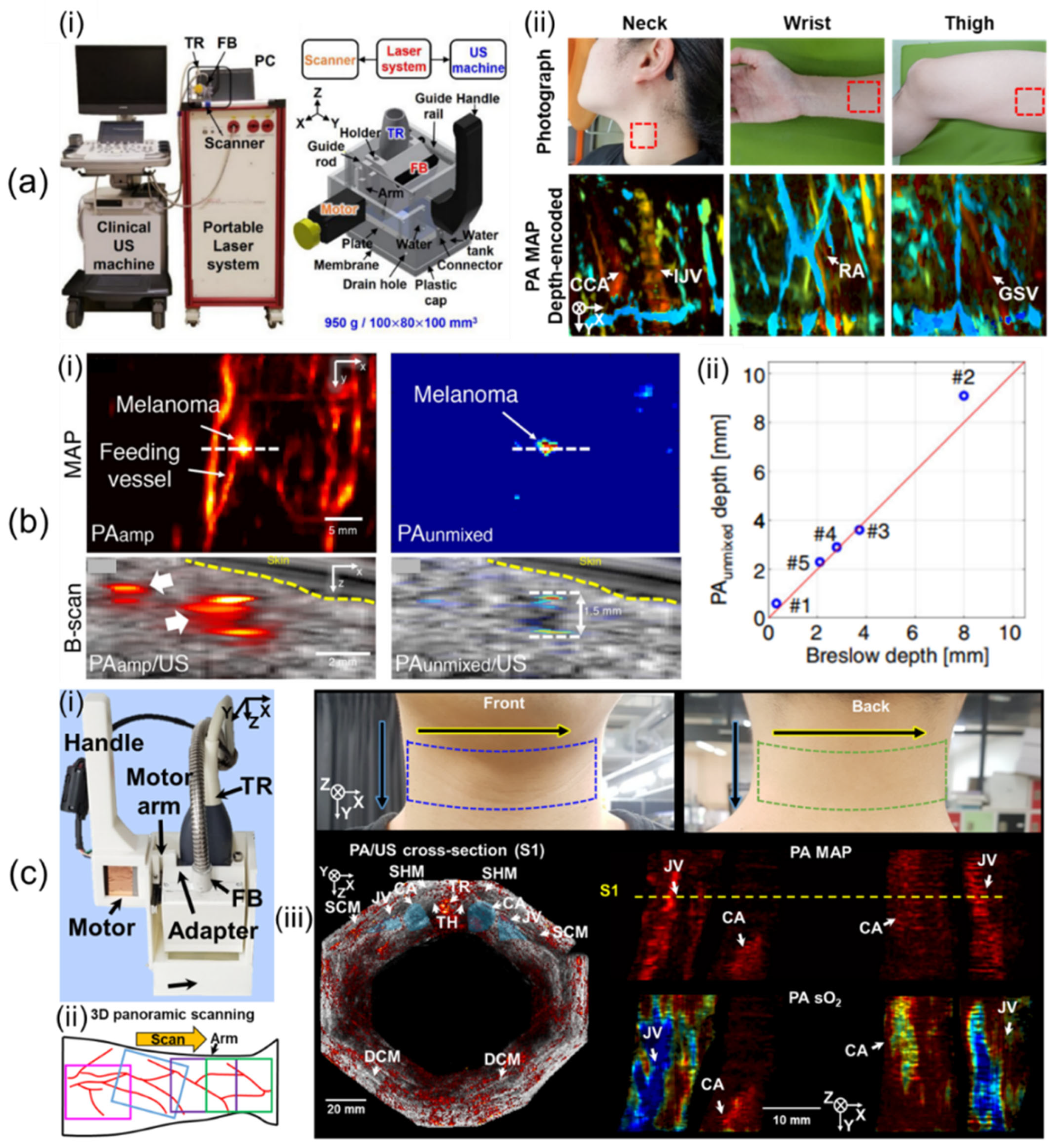
2.2. Three-Dimensional Handheld PA Imaging Systems Using Mechanical Scanning
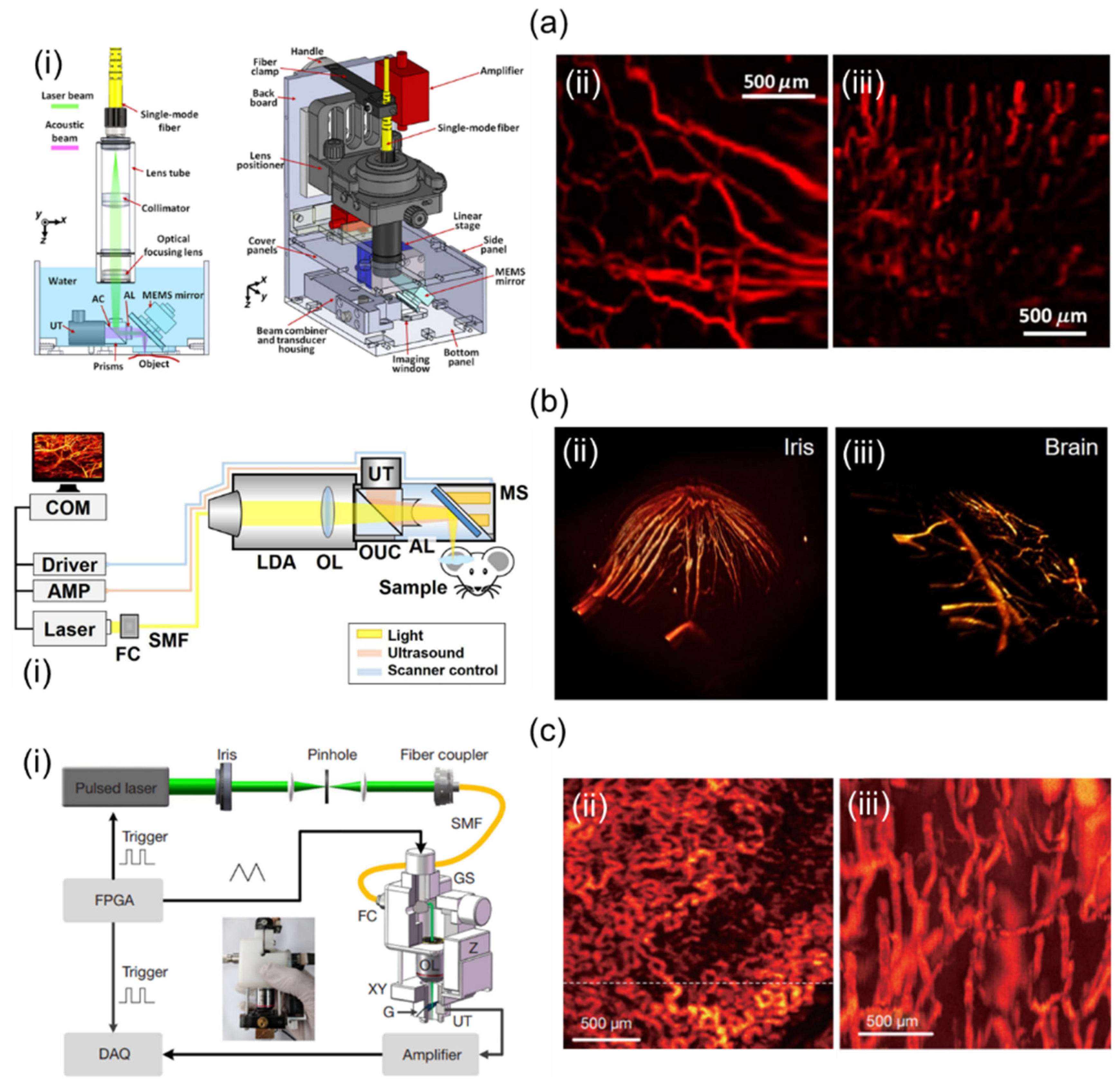
2.3. Three-Dimensional Handheld PA Imaging Systems Using Mirror Scanning
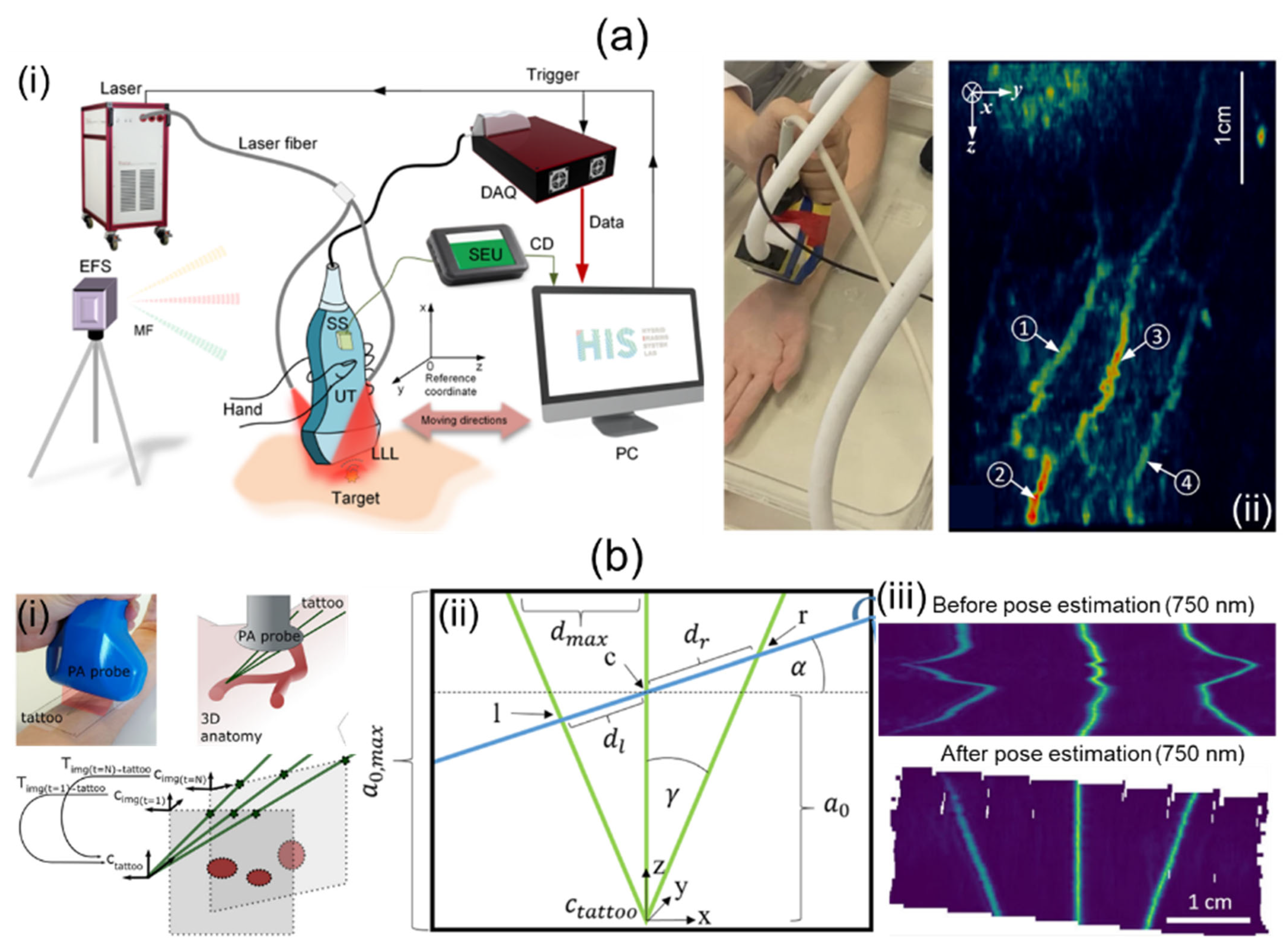
2.4. Three-Dimensional Handheld PA Imaging Systems Using Freehand Scanning
3. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chen, Q.; Qin, W.; Qi, W.; Xi, L. Progress of clinical translation of handheld and semi-handheld photoacoustic imaging. Photoacoustics 2021, 22, 100264. [Google Scholar] [CrossRef]
- Choi, W.; Park, B.; Choi, S.; Oh, D.; Kim, J.; Kim, C. Recent Advances in Contrast-Enhanced Photoacoustic Imaging: Overcoming the Physical and Practical Challenges. Chem. Rev. 2023, 123, 7379–7419. [Google Scholar] [CrossRef]
- Cao, R.; Zhao, J.; Li, L.; Du, L.; Zhang, Y.; Luo, Y.; Jiang, L.; Davis, S.; Zhou, Q.; de la Zerda, A.; et al. Optical-resolution photoacoustic microscopy with a needle-shaped beam. Nat. Photonics 2022, 17, 89–95. [Google Scholar] [CrossRef]
- Liu, C.; Wang, L. Functional photoacoustic microscopy of hemodynamics: A review. Biomed. Eng. Lett. 2022, 12, 97–124. [Google Scholar] [CrossRef]
- Zhang, Z.; Mu, G.; Wang, E.; Cui, D.; Yang, F.; Wang, Z.; Yang, S.; Shi, Y. Photoacoustic imaging of tumor vascular involvement and surgical margin pathology for feedback-guided intraoperative tumor resection. Appl. Phys. Lett. 2022, 121, 193702. [Google Scholar] [CrossRef]
- Bell, A.G. Upon the production and reproduction of sound by light. J. Soc. Telegr. Eng. 1880, 9, 404–426. [Google Scholar] [CrossRef]
- Yao, J.; Kaberniuk, A.A.; Li, L.; Shcherbakova, D.M.; Zhang, R.; Wang, L.; Li, G.; Verkhusha, V.V.; Wang, L.V. Multiscale photoacoustic tomography using reversibly switchable bacterial phytochrome as a near-infrared photochromic probe. Nat. Methods 2015, 13, 67–73. [Google Scholar] [CrossRef]
- Wang, L.V.; Yao, J. A practical guide to photoacoustic tomography in the life sciences. Nat. Methods 2016, 13, 627–638. [Google Scholar] [CrossRef]
- Choi, W.; Park, E.-Y.; Jeon, S.; Yang, Y.; Park, B.; Ahn, J.; Cho, S.; Lee, C.; Seo, D.-K.; Cho, J.-H.; et al. Three-dimensional multistructural quantitative photoacoustic and US imaging of human feet in vivo. Radiology 2022, 303, 467–473. [Google Scholar] [CrossRef]
- Lee, C.; Cho, S.; Lee, D.; Lee, J.; Park, J.-I.; Kim, H.-J.; Park, S.H.; Choi, W.; Kim, U.; Kim, C. Panoramic Volumetric Clinical Handheld Photoacoustic and Ultrasound Imaging. Photoacoustics 2023, 31, 100512. [Google Scholar] [CrossRef]
- Neuschler, E.I.; Butler, R.; Young, C.A.; Barke, L.D.; Bertrand, M.L.; Böhm-Vélez, M.; Destounis, S.; Donlan, P.; Grobmyer, S.R.; Katzen, J.; et al. A pivotal study of optoacoustic imaging to diagnose benign and malignant breast masses: A new evaluation tool for radiologists. Radiology 2018, 287, 398–412. [Google Scholar] [CrossRef]
- Yang, X.; Chen, Y.-H.; Xia, F.; Sawan, M. Photoacoustic imaging for monitoring of stroke diseases: A review. Photoacoustics 2021, 23, 100287. [Google Scholar] [CrossRef]
- Mantri, Y.; Dorobek, T.R.; Tsujimoto, J.; Penny, W.F.; Garimella, P.S.; Jokerst, J.V. Monitoring peripheral hemodynamic response to changes in blood pressure via photoacoustic imaging. Photoacoustics 2022, 26, 100345. [Google Scholar] [CrossRef]
- Menozzi, L.; Del Águila, Á.; Vu, T.; Ma, C.; Yang, W.; Yao, J. Three-dimensional non-invasive brain imaging of ischemic stroke by integrated photoacoustic, ultrasound and angiographic tomography (PAUSAT). Photoacoustics 2023, 29, 100444. [Google Scholar] [CrossRef]
- Li, H.; Zhu, Y.; Luo, N.; Tian, C. In vivo monitoring of hemodynamic changes in ischemic stroke using photoacoustic tomography. J. Biophotonics 2023, e202300235. [Google Scholar] [CrossRef]
- Li, J.; Chen, Y.; Ye, W.; Zhang, M.; Zhu, J.; Zhi, W.; Cheng, Q. Molecular breast cancer subtype identification using photoacoustic spectral analysis and machine learning at the biomacromolecular level. Photoacoustics 2023, 30, 100483. [Google Scholar] [CrossRef]
- Lin, L.; Wang, L.V. The emerging role of photoacoustic imaging in clinical oncology. Nat. Rev. Clin. Oncol. 2022, 19, 365–384. [Google Scholar] [CrossRef]
- Xing, B.; He, Z.; Zhou, F.; Zhao, Y.; Shan, T. Automatic force-controlled 3D photoacoustic system for human peripheral vascular imaging. Biomed. Opt. Express 2023, 14, 987–1002. [Google Scholar] [CrossRef]
- Zhang, M.; Wen, L.; Zhou, C.; Pan, J.; Wu, S.; Wang, P.; Zhang, H.; Chen, P.; Chen, Q.; Wang, X.; et al. Identification of different types of tumors based on photoacoustic spectral analysis: Preclinical feasibility studies on skin tumors. J. Biomed. Opt. 2023, 28, 065004. [Google Scholar] [CrossRef]
- Kim, J.; Park, B.; Ha, J.; Steinberg, I.; Hooper, S.M.; Jeong, C.; Park, E.-Y.; Choi, W.; Liang, T.; Bae, J.S.; et al. Multiparametric Photoacoustic Analysis of Human Thyroid Cancers in vivo photoacoustic Analysis of Human Thyroid Cancers. Cancer Res. 2021, 81, 4849–4860. [Google Scholar] [CrossRef]
- Park, B.; Kim, C.; Kim, J. Recent Advances in Ultrasound and Photoacoustic Analysis for Thyroid Cancer Diagnosis. Adv. Phys. Res. 2023, 2, 2200070. [Google Scholar] [CrossRef]
- Kim, J.; Kim, Y.; Park, B.; Seo, H.-M.; Bang, C.; Park, G.; Park, Y.; Rhie, J.; Lee, J.; Kim, C. Multispectral ex vivo photoacoustic imaging of cutaneous melanoma for better selection of the excision margin. Br. J. Dermatol. 2018, 179, 780–782. [Google Scholar] [CrossRef] [PubMed]
- Yang, M.; Zhao, L.; He, X.; Su, N.; Zhao, C.; Tang, H.; Hong, T.; Li, W.; Yang, F.; Lin, L.; et al. Photoacoustic/ultrasound dual imaging of human thyroid cancers: An initial clinical study. Biomed. Opt. Express 2017, 8, 3449–3457. [Google Scholar] [CrossRef] [PubMed]
- Garcia-Uribe, A.; Erpelding, T.N.; Krumholz, A.; Ke, H.; Maslov, K.; Appleton, C.; Margenthaler, J.A.; Wang, L.V. Dual-modality photoacoustic and ultrasound imaging system for noninvasive sentinel lymph node detection in patients with breast cancer. Sci. Rep. 2015, 5, 15748. [Google Scholar] [CrossRef] [PubMed]
- Berg, P.J.v.D.; Daoudi, K.; Moens, H.J.B.; Steenbergen, W. Feasibility of photoacoustic/ultrasound imaging of synovitis in finger joints using a point-of-care system. Photoacoustics 2017, 8, 8–14. [Google Scholar] [CrossRef]
- Dima, A.; Ntziachristos, V. Non-invasive carotid imaging using optoacoustic tomography. Opt. Express 2012, 20, 25044–25057. [Google Scholar] [CrossRef]
- Dima, A.; Ntziachristos, V. In-vivo handheld optoacoustic tomography of the human thyroid. Photoacoustics 2016, 4, 65–69. [Google Scholar] [CrossRef]
- Fenster, A.; Downey, D.B. 3-D ultrasound imaging: A review. IEEE Eng. Med. Biol. Mag. 1996, 15, 41–51. [Google Scholar] [CrossRef]
- Yang, J.; Choi, S.; Kim, C. Practical review on photoacoustic computed tomography using curved ultrasound array transducer. Biomed. Eng. Lett. 2021, 12, 19–35. [Google Scholar] [CrossRef]
- Deán-Ben, X.L.; Razansky, D. Portable spherical array probe for volumetric real-time optoacoustic imaging at centimeter-scale depths. Opt. Express 2013, 21, 28062–28071. [Google Scholar] [CrossRef]
- Zhang, W.; Ma, H.; Cheng, Z.; Wang, Z.; Zhang, L.; Yang, S. Miniaturized photoacoustic probe for in vivo imaging of subcutaneous microvessels within human skin. Quant. Imaging Med. Surg. 2019, 9, 807. [Google Scholar] [CrossRef]
- Park, K.; Kim, J.Y.; Lee, C.; Jeon, S.; Lim, G.; Kim, C. Handheld Photoacoustic Microscopy Probe. Sci. Rep. 2017, 7, 13359. [Google Scholar] [CrossRef]
- Moothanchery, M.; Dev, K.; Balasundaram, G.; Bi, R.; Olivo, M. Acoustic resolution photoacoustic microscopy based on microelectromechanical systems scanner. J. Biophotonics 2019, 13, e201960127. [Google Scholar] [CrossRef] [PubMed]
- Toi, M.; Asao, Y.; Matsumoto, Y.; Sekiguchi, H.; Yoshikawa, A.; Takada, M.; Kataoka, M.; Endo, T.; Kawaguchi-Sakita, N.; Kawashima, M.; et al. Visualization of tumor-related blood vessels in human breast by photoacoustic imaging system with a hemispherical detector array. Sci. Rep. 2017, 7, 41970. [Google Scholar] [CrossRef]
- Kim, W.; Choi, W.; Ahn, J.; Lee, C.; Kim, C. Wide-field three-dimensional photoacoustic/ultrasound scanner using a two-dimensional matrix transducer array. Opt. Lett. 2023, 48, 343–346. [Google Scholar] [CrossRef]
- Neuschmelting, V.; Burton, N.C.; Lockau, H.; Urich, A.; Harmsen, S.; Ntziachristos, V.; Kircher, M.F. Performance of a Multispectral Optoacoustic Tomography (MSOT) System equipped with 2D vs. 3D Handheld Probes for Potential Clinical Translation. Photoacoustics 2015, 4, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Dean-Ben, X.L.; Ozbek, A.; Razansky, D. Volumetric real-time tracking of peripheral human vasculature with GPU-accelerated three-dimensional optoacoustic tomography. IEEE Trans. Med. Imaging 2013, 32, 2050–2055. [Google Scholar] [CrossRef] [PubMed]
- Deán-Ben, X.L.; Bay, E.; Razansky, D. Functional optoacoustic imaging of moving objects using microsecond-delay acquisition of multispectral three-dimensional tomographic data. Sci. Rep. 2014, 4, srep05878. [Google Scholar] [CrossRef] [PubMed]
- Deán-Ben, X.L.; Fehm, T.F.; Gostic, M.; Razansky, D. Volumetric hand-held optoacoustic angiography as a tool for real-time screening of dense breast. J. Biophotonics 2015, 9, 253–259. [Google Scholar] [CrossRef] [PubMed]
- Ford, S.J.; Bigliardi, P.L.; Sardella, T.C.; Urich, A.; Burton, N.C.; Kacprowicz, M.; Bigliardi, M.; Olivo, M.; Razansky, D. Structural and functional analysis of intact hair follicles and pilosebaceous units by volumetric multispectral optoacoustic tomography. J. Investig. Dermatol. 2016, 136, 753–761. [Google Scholar] [CrossRef] [PubMed]
- Attia, A.B.E.; Chuah, S.Y.; Razansky, D.; Ho, C.J.H.; Malempati, P.; Dinish, U.; Bi, R.; Fu, C.Y.; Ford, S.J.; Lee, J.S.-S.; et al. Noninvasive real-time characterization of non-melanoma skin cancers with handheld optoacoustic probes. Photoacoustics 2017, 7, 20–26. [Google Scholar] [CrossRef]
- Deán-Ben, X.L.; Razansky, D. Functional optoacoustic human angiography with handheld video rate three dimensional scanner. Photoacoustics 2013, 1, 68–73. [Google Scholar] [CrossRef] [PubMed]
- Ivankovic, I.; Merčep, E.; Schmedt, C.-G.; Deán-Ben, X.L.; Razansky, D. Real-time volumetric assessment of the human carotid artery: Handheld multispectral optoacoustic tomography. Radiology 2019, 291, 45–50. [Google Scholar] [CrossRef] [PubMed]
- Deán-Ben, X.; Fehm, T.F.; Razansky, D. Universal Hand-held Three-dimensional Optoacoustic Imaging Probe for Deep Tissue Human Angiography and Functional Preclinical Studies in Real Time. J. Vis. Exp. 2014, 93, e51864. [Google Scholar] [CrossRef]
- Fehm, T.F.; Deán-Ben, X.L.; Razansky, D. Four dimensional hybrid ultrasound and optoacoustic imaging via passive element optical excitation in a hand-held probe. Appl. Phys. Lett. 2014, 105, 173505. [Google Scholar] [CrossRef]
- Ozsoy, C.; Cossettini, A.; Ozbek, A.; Vostrikov, S.; Hager, P.; Dean-Ben, X.L.; Benini, L.; Razansky, D. LightSpeed: A Compact, High-Speed Optical-Link-Based 3D Optoacoustic Imager. IEEE Trans. Med. Imaging 2021, 40, 2023–2029. [Google Scholar] [CrossRef] [PubMed]
- Deán-Ben, X.L.; Özbek, A.; Razansky, D. Accounting for speed of sound variations in volumetric hand-held optoacoustic imaging. Front. Optoelectron. 2017, 10, 280–286. [Google Scholar] [CrossRef]
- Ron, A.; Deán-Ben, X.L.; Reber, J.; Ntziachristos, V.; Razansky, D. Characterization of Brown Adipose Tissue in a Diabetic Mouse Model with Spiral Volumetric Optoacoustic Tomography. Mol. Imaging Biol. 2018, 21, 620–625. [Google Scholar] [CrossRef]
- Ozsoy, C.; Cossettini, A.; Hager, P.; Vostrikov, S.; Dean-Ben, X.L.; Benini, L.; Razansky, D. Towards a compact, high-speed optical linkbased 3D optoacoustic imager. In Proceedings of the 2020 IEEE SENSORS, Rotterdam, The Netherlands, 25–28 October 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Knauer, N.; Dean-Ben, X.L.; Razansky, D. Spatial Compounding of Volumetric Data Enables Freehand Optoacoustic Angiography of Large-Scale Vascular Networks. IEEE Trans. Med. Imaging 2019, 39, 1160–1169. [Google Scholar] [CrossRef] [PubMed]
- Chen, Z.; Deán-Ben, X.L.; Gottschalk, S.; Razansky, D. Hybrid system for in vivo epifluorescence and 4D optoacoustic imaging. Opt. Lett. 2017, 42, 4577–4580. [Google Scholar] [CrossRef]
- Chuah, S.Y.; Attia, A.B.E.; Long, V.; Ho, C.J.H.; Malempati, P.; Fu, C.Y.; Ford, S.J.; Lee, J.S.S.; Tan, W.P.; Razansky, D.; et al. Structural and functional 3D mapping of skin tumours with non-invasive multispectral optoacoustic tomography. Ski. Res. Technol. 2016, 23, 221–226. [Google Scholar] [CrossRef] [PubMed]
- Fehm, T.F.; Deán-Ben, X.L.; Schaur, P.; Sroka, R.; Razansky, D. Volumetric optoacoustic imaging feedback during endovenous laser therapy—An ex vivo investigation. J. Biophotonics 2015, 9, 934–941. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.; Tang, K.; Jin, H.; Zhang, R.; Kim, T.T.H.; Zheng, Y. Continuous wave laser excitation based portable optoacoustic imaging system for melanoma detection. In Proceedings of the 2019 IEEE Biomedical Circuits and Systems Conference (BioCAS), Nara, Japan, 17–19 October 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Liu, S.; Tang, K.; Feng, X.; Jin, H.; Gao, F.; Zheng, Y. Toward Wearable Healthcare: A Miniaturized 3D Imager with Coherent Frequency-Domain Photoacoustics. IEEE Trans. Biomed. Circuits Syst. 2019, 13, 1417–1424. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.; Feng, X.; Jin, H.; Zhang, R.; Luo, Y.; Zheng, Z.; Gao, F.; Zhenga, Y. Handheld Photoacoustic Imager for Theranostics in 3D. IEEE Trans. Med. Imaging 2019, 38, 2037–2046. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.; Song, W.; Liao, X.; Kim, T.T.-H.; Zheng, Y. Development of a Handheld Volumetric Photoacoustic Imaging System with a Central-Holed 2D Matrix Aperture. IEEE Trans. Biomed. Eng. 2020, 67, 2482–2489. [Google Scholar] [CrossRef] [PubMed]
- Lee, C.; Choi, W.; Kim, J.; Kim, C. Three-dimensional clinical handheld photoacoustic/ultrasound scanner. Photoacoustics 2020, 18, 100173. [Google Scholar] [CrossRef] [PubMed]
- Park, B.; Bang, C.H.; Lee, C.; Han, J.H.; Choi, W.; Kim, J.; Park, G.S.; Rhie, J.W.; Lee, J.H.; Kim, C. 3D wide-field multispectral photoacoustic imaging of human melanomas in vivo: A pilot study. J. Eur. Acad. Dermatol. Venereol. 2020, 35, 669–676. [Google Scholar] [CrossRef]
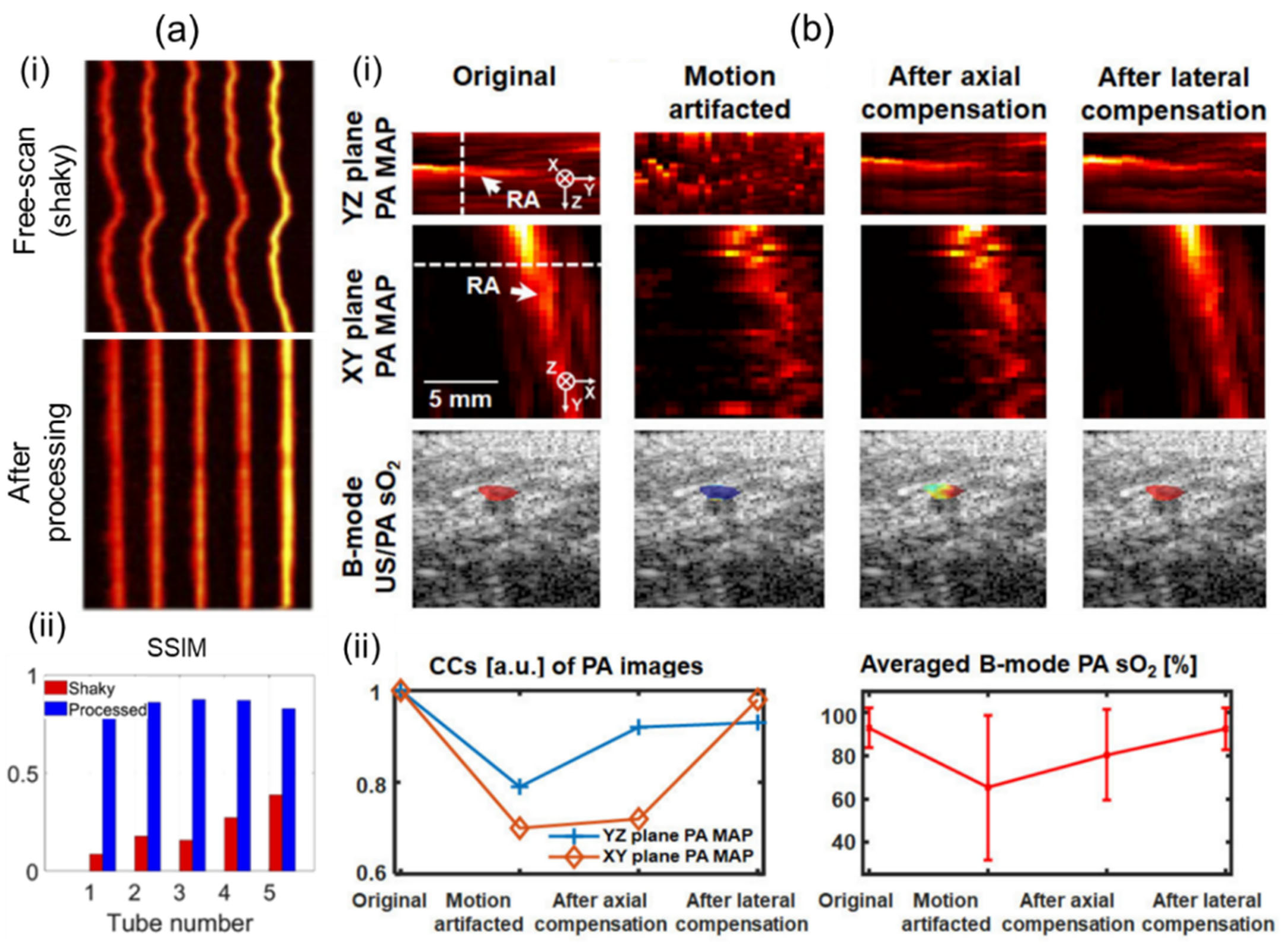
- Yoon, C.; Lee, C.; Shin, K.; Kim, C. Motion Compensation for 3D Multispectral Handheld Photoacoustic Imaging. Biosensors 2022, 12, 1092. [Google Scholar] [CrossRef] [PubMed]
- Aguirre, J.; Schwarz, M.; Garzorz, N.; Omar, M.; Buehler, A.; Eyerich, K.; Ntziachristos, V. Precision assessment of label-free psoriasis biomarkers with ultra-broadband optoacoustic mesoscopy. Nat. Biomed. Eng. 2017, 1, 0068. [Google Scholar] [CrossRef]
- Bost, W.; Lemor, R.; Fournelle, M. Optoacoustic Imaging of Subcutaneous Microvasculature with a Class one Laser. IEEE Trans. Med. Imaging 2014, 33, 1900–1904. [Google Scholar] [CrossRef]
- Hajireza, P.; Shi, W.; Zemp, R.J. Real-time handheld optical-resolution photoacoustic microscopy. Opt. Express 2011, 19, 20097–20102. [Google Scholar] [CrossRef]
- Lin, L.; Zhang, P.; Xu, S.; Shi, J.; Li, L.; Yao, J.; Wang, L.; Zou, J.; Wang, L.V. Handheld optical-resolution photoacoustic microscopy. J. Biomed. Opt. 2016, 22, 041002. [Google Scholar] [CrossRef]
- Qin, W.; Chen, Q.; Xi, L. A handheld microscope integrating photoacoustic microscopy and optical coherence tomography. Biomed. Opt. Express 2018, 9, 2205–2213. [Google Scholar] [CrossRef] [PubMed]
- Chen, Q.; Guo, H.; Jin, T.; Qi, W.; Xie, H.; Xi, L. Ultracompact high-resolution photoacoustic microscopy. Opt. Lett. 2018, 43, 1615–1618. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Zhang, Y.; Zhu, J.; Tang, X.; Wang, L. Freehand scanning photoacoustic microscopy with simultaneous localization and mapping. Photoacoustics 2022, 28, 100411. [Google Scholar] [CrossRef] [PubMed]
- Fournelle, M.; Hewener, H.; Gunther, C.; Fonfara, H.; Welsch, H.-J.; Lemor, R. Free-hand 3d optoacoustic imaging of vasculature. In Proceedings of the 2009 IEEE International Ultrasonics Symposium, Rome, Italy, 20–23 September 2009; pp. 116–119. [Google Scholar] [CrossRef]
- Jiang, D.; Chen, H.; Zheng, R.; Gao, F. Hand-held free-scan 3D photoacoustic tomography with global positioning system. J. Appl. Phys. 2022, 132, 074904. [Google Scholar] [CrossRef]
- Holzwarth, N.; Schellenberg, M.; Gröhl, J.; Dreher, K.; Nölke, J.-H.; Seitel, A.; Tizabi, M.D.; Müller-Stich, B.P.; Maier-Hein, L. Tattoo tomography: Freehand 3D photoacoustic image reconstruction with an optical pattern. Int. J. Comput. Assist. Radiol. Surg. 2021, 16, 1101–1110. [Google Scholar] [CrossRef] [PubMed]
- Deán-Ben, X.L.; Razansky, D. On the link between the speckle free nature of optoacoustics and visibility of structures in limited-view tomography. Photoacoustics 2016, 4, 133–140. [Google Scholar] [CrossRef] [PubMed]
- Jeon, S.; Park, J.; Managuli, R.; Kim, C. A novel 2-D synthetic aperture focusing technique for acoustic-resolution photoacoustic microscopy. IEEE Trans. Med. Imaging 2018, 38, 250–260. [Google Scholar] [CrossRef] [PubMed]
- Yao, J.; Wang, L.V. Sensitivity of photoacoustic microscopy. Photoacoustics 2014, 2, 87–101. [Google Scholar] [CrossRef]
- Cho, S.-W.; Park, S.M.; Park, B.; Kim, D.Y.; Lee, T.G.; Kim, B.-M.; Kim, C.; Kim, J.; Lee, S.-W.; Kim, C.-S. High-speed photoacoustic microscopy: A review dedicated on light sources. Photoacoustics 2021, 24, 100291. [Google Scholar] [CrossRef] [PubMed]
- Ozsoy, C.; Cossettini, A.; Ozbek, A.; Vostrikov, S.; Hager, P.; Dean-Ben, X.L.; Benini, L.; Razansky, D. Compact Optical Link Acquisition for High-Speed Optoacoustic Imaging (SPIE BiOS); SPIE: Bellingham, WA, USA, 2022. [Google Scholar]
- Hager, P.A.; Jush, F.K.; Biele, M.; Düppenbecker, P.M.; Schmidt, O.; Benini, L. LightABVS: A digital ultrasound transducer for multi-modality automated breast volume scanning. In Proceedings of the IEEE International Ultrasonics Symposium (IUS), Glasgow, Scotland, UK, 6–9 October 2019. [Google Scholar]
- Ozbek, A.; Deán-Ben, X.L.; Razansky, D. Realtime parallel back-projection algorithm for three-dimensional optoacoustic imaging devices. In Opto-Acoustic Methods and Applications; Ntziachristos, V., Lin, C., Eds.; Optica Publishing Group: Washington, DC, USA, 2013; Volume 8800, p. 88000I. Available online: https://opg.optica.org/abstract.cfm?URI=ECBO-2013-88000I (accessed on 12 May 2013).
- Wang, Y.; Erpelding, T.N.; Jankovic, L.; Guo, Z.; Robert, J.-L.; David, G.; Wang, L.V. In vivo three-dimensional photoacoustic imaging based on a clinical matrix array ultrasound probe. J. Biomed. Opt. 2012, 17, 0612081–0612085. [Google Scholar] [CrossRef]
- Xu, M.; Wang, L.V. Universal back-projection algorithm for photoacoustic computed tomography. Phys. Rev. E 2005, 71, 016706. [Google Scholar] [CrossRef]
- Rosenthal, A.; Ntziachristos, V.; Razansky, D. Acoustic Inversion in Optoacoustic Tomography: A Review. Curr. Med. Imaging Former. Curr. Med. Imaging Rev. 2013, 9, 318–336. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Maslov, K.; Yao, J.; Rao, B.; Wang, L.V. Fast voice-coil scanning optical-resolution photoacoustic microscopy. Opt. Lett. 2011, 36, 139–141. [Google Scholar] [CrossRef]
- Wang, L.; Maslov, K.; Wang, L.V. Single-cell label-free photoacoustic flowoxigraphy in vivo. Proc. Natl. Acad. Sci. USA 2013, 110, 5759–5764. [Google Scholar] [CrossRef] [PubMed]
- Rohling, R.; Gee, A.; Berman, L. A comparison of freehand three-dimensional ultrasound reconstruction techniques. Med. Image Anal. 1999, 3, 339–359. [Google Scholar] [CrossRef] [PubMed]
- Chen, H.-B.; Zheng, R.; Qian, L.-Y.; Liu, F.-Y.; Song, S.; Zeng, H.-Y. Improvement of 3-D Ultrasound Spine Imaging Technique Using Fast Reconstruction Algorithm. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2021, 68, 3104–3113. [Google Scholar] [CrossRef]
- Lasso, A.; Heffter, T.; Rankin, A.; Pinter, C.; Ungi, T.; Fichtinger, G. PLUS: Open-Source Toolkit for Ultrasound-Guided Intervention Systems. IEEE Trans. Biomed. Eng. 2014, 61, 2527–2537. [Google Scholar] [CrossRef] [PubMed]
- Xu, S.; Li, S.; Zou, J. A micromachined water-immersible scanning mirror using BoPET hinges. Sensors Actuators A Phys. 2019, 298, 111564. [Google Scholar] [CrossRef]
- Xu, S.; Huang, C.-H.; Zou, J. Microfabricated water-immersible scanning mirror with a small form factor for handheld ultrasound and photoacoustic microscopy. J. Micro/Nanolithography MEMS MOEMS 2015, 14, 035004. [Google Scholar] [CrossRef]
- Li, Y.; Wang, Y.; Huang, W.; Zhang, Z. Automatic image stitching using SIFT. In Proceedings of the 2008 International Conference on Audio, Language and Image Processing, Shanghai, China, 7–9 July 2008; pp. 568–571. [Google Scholar] [CrossRef]
- Domokos, C.; Kato, Z. Parametric estimation of affine deformations of planar shapes. Pattern Recognit. 2010, 43, 569–578. [Google Scholar] [CrossRef]
- Szeliski, R. Image Alignment and Stitching: A Tutorial; Foundations and Trends® in Computer Graphics and Vision: Hanover, MA, USA, 2007; Volume 2, pp. 1–104. [Google Scholar] [CrossRef]
- AA, T.; Arfanakis, K. Motion correction in PROPELLER and turboprop-MRI. Magn. Reson Med. 2009, 62, 174–182. [Google Scholar]
- Mozaffarzadeh, M.; Moore, C.; Golmoghani, E.B.; Mantri, Y.; Hariri, A.; Jorns, A.; Fu, L.; Verweij, M.D.; Orooji, M.; de Jong, N.; et al. Motion-compensated noninvasive periodontal health monitoring using handheld and motor-based photoacoustic-ultrasound imaging systems. Biomed. Opt. Express 2021, 12, 1543–1558. [Google Scholar] [CrossRef] [PubMed]
- Heinrich, M.P.; Jenkinson, M.; Bhushan, M.; Matin, T.; Gleeson, F.V.; Brady, S.M.; Schnabel, J.A. MIND: Modality independent neighbourhood descriptor for multi-modal deformable registration. Med. Image Anal. 2012, 16, 1423–1435. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, D.; Hubbell, R.; Xia, J. Second generation slit-based photoacoustic tomography system for vascular imaging in human. J. Biophotonics 2017, 10, 799–804. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Wang, D.; Zhang, Y.; Geng, J.; Lovell, J.F.; Xia, J. Slit-enabled linear-array photoacoustic tomography with near isotropic spatial resolution in three dimensions. Opt. Lett. 2015, 41, 127–130. [Google Scholar] [CrossRef] [PubMed]
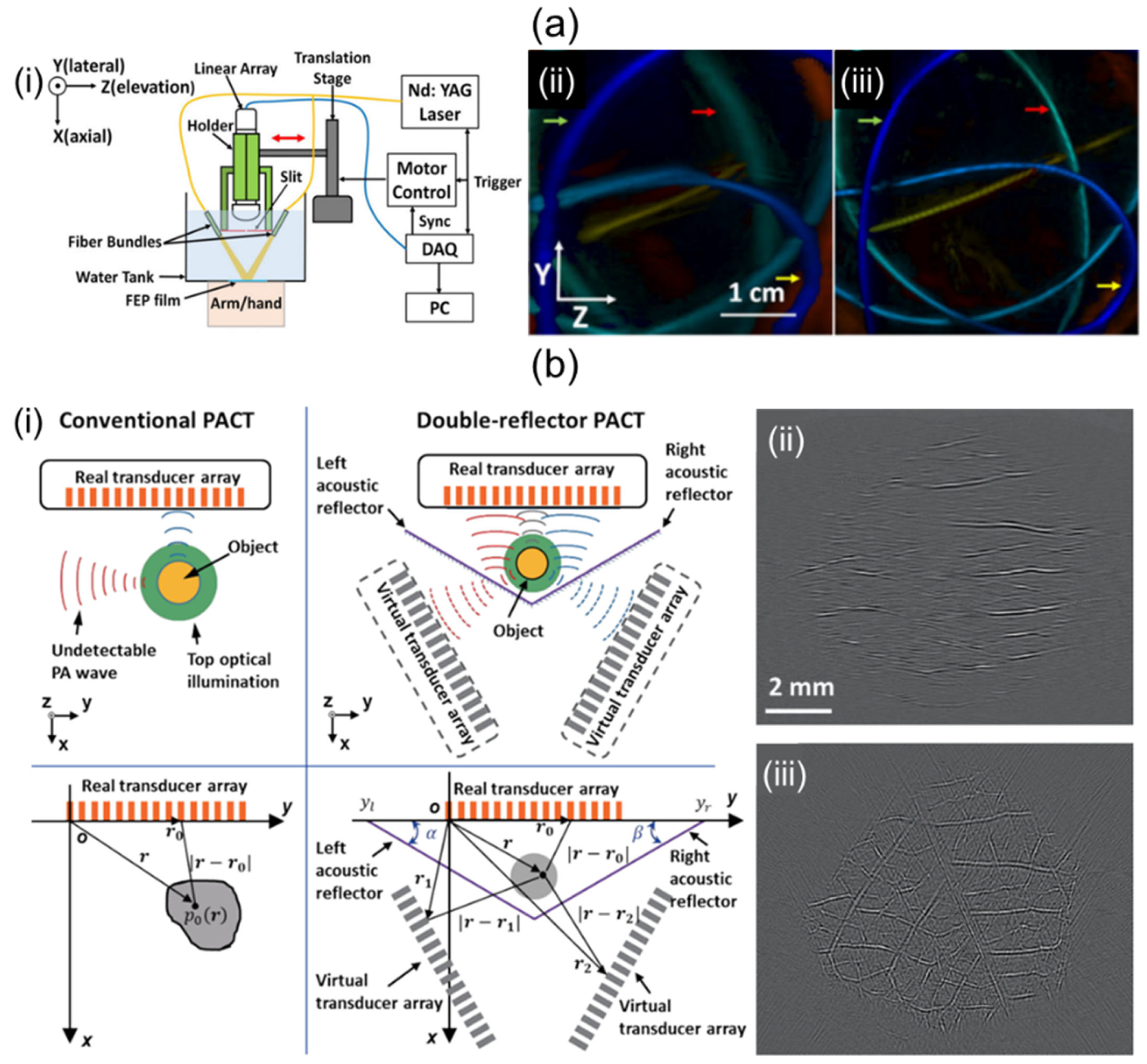
- Li, G.; Xia, J.; Wang, K.; Maslov, K.; Anastasio, M.A.; Wang, L.V. Tripling the detection view of high-frequency linear-array-based photoacoustic computed tomography by using two planar acoustic reflectors. Quant. Imaging Med. Surg. 2015, 5, 57–62. [Google Scholar] [CrossRef]
- Westerveld, W.J.; Hasan, M.U.; Shnaiderman, R.; Ntziachristos, V.; Rottenberg, X.; Severi, S.; Rochus, V. Sensitive, small, broadband and scalable optomechanical ultrasound sensor in silicon photonics. Nat. Photon. 2021, 15, 341–345. [Google Scholar] [CrossRef]
- Hazan, Y.; Levi, A.; Nagli, M.; Rosenthal, A. Silicon-photonics acoustic detector for optoacoustic micro-tomography. Nat. Commun. 2022, 13, 1488. [Google Scholar] [CrossRef]
- Pan, J.; Li, Q.; Feng, Y.; Zhong, R.; Fu, Z.; Yang, S.; Sun, W.; Zhang, B.; Sui, Q.; Chen, J.; et al. Parallel interrogation of the chalcogenide-based micro-ring sensor array for photoacoustic tomography. Nat. Commun. 2023, 14, 3250. [Google Scholar] [CrossRef] [PubMed]
- Park, J.; Park, B.; Kim, T.Y.; Jung, S.; Choi, W.J.; Ahn, J.; Yoon, D.H.; Kim, J.; Jeon, S.; Lee, D.; et al. Quadruple ultrasound, photoacoustic, optical coherence, and fluorescence fusion imaging with a trans-parent ultrasound transducer. Proc. Natl. Acad. Sci. USA 2021, 118, e1920879118. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.; Choi, S.; Kim, J.; Park, B.; Kim, C. Recent advances in deep-learning-enhanced photoacoustic imaging. Adv. Photonics Nexus 2023, 2, 054001. [Google Scholar] [CrossRef]
- Park, B.; Park, S.; Kim, J.; Kim, C. Listening to drug delivery and responses via photoacoustic imaging. Adv. Drug Deliv. Rev. 2022, 184, 114235. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scanning Mechanism | Direct [30,39] | Mechanical [10,58] | Mirror [32,64] | Freehand |
|---|---|---|---|---|
| UST type | 2D array | 1D array | Single element | All types |
| Lateral resolution (μm) | 200 | 592–799 | 5–12 | * |
| Penetration depth (mm) | <30 | <30 | <1 | * |
| Coaxial configuration unit | Hole | Standoff | Beam combiner | * |
| Author | Dea’n-Ben et al. [39] | Özsoy et al. [75] | Liu et al. [57] | Kim et al. [35] | Wang et al. [78] | |
|---|---|---|---|---|---|---|
| Laser | Wavelength | 660–900 nm | 809 nm | - | 660–1320 nm | 650 nm |
| Pulse duration | <10 ns | 40 ns | - | - | 6.5 ns | |
| PRF | - | ~500 Hz | - | 10 Hz | 10 Hz | |
| Light delivery | Fiber | Fiber | Fiber | Fiber | Fiber | |
| Probe | Scanning aids | - | - | 2 motor stages | - | - |
| Scanning type | Direct | Direct | Direct | Direct + mechanical | Direct | |
| UST type | 2D hemispherical | 2D hemispherical | 2D matrix | 2D matrix | 2D matrix | |
| # of elements | 256 | 256 | 72 | 1024 | 2500 | |
| Center frequency | 4 MHz | 4 MHz | 2.25 MHz | 3.3 MHz | - | |
| Bandwidth | 100% | 100% | 65% | - | - | |
| Resolution | S: 200 μm | - | A, L: 730, 800 μm | A, L: 760, 2800 μm | A, L, E: 840, 690, 900 μm | |
| Scan time | 0.1 s | 0.002 s | 0.1 s | - | 3 h | |
| FOV | - | 10 × 10 × 10 mm3 | 10 × 10 × 10 mm3 | 10 × 10 mm2 | 20 × 20 × 20 mm3 | |
| Weight | - | - | 44 g | - | - | |
| Dimension | - | - | <10 cm3 | - | - | |
| Data acquisition/ processing system | Platform | Custom DAQ | Custom DAQ | SonixDAQ | Verasonics | Custom DAQ |
| Sampling rate | 40 MHz | 40 MHz | 40 MHz | - | - | |
| Author | Lee et al. [58] | Park et al. [59] | Lee et al. [10] | Bost et al. [62] | |
|---|---|---|---|---|---|
| Laser | Wavelength | 690–950 nm | 690–950 nm | 690–950 nm | 532/1024 nm |
| Pulse duration | 5 ns | 5 ns | 5 ns | 1.5 ns | |
| PRF | 10 Hz | 10 Hz | 10 Hz | 1 kHz | |
| Light delivery | Fiber | Fiber | Fiber | Fiber | |
| Probe | Scanning aids | 1 motor | 1 motor | 1 motor | 2 motor stages |
| Scanning type | Mechanical | Mechanical | Mechanical | Mechanical | |
| UST type | 1D linear | 1D linear | 1D linear | Single element | |
| # of elements | 128 | 128 | 128 | 1 | |
| Center frequency | 8.5 MHz | 8.5 MHz | 8.5 MHz | 35 MHz | |
| Bandwidth | 62% | 62% | 62% | 100% | |
| Resolution | A, L: 191, 799 μm | A, L: 200, 1000 μm | A, L, E: 195, 592, 1976 μm | L: 93 μm | |
| Scan time | 20 s | 11.4 s | 16.7 s | 4 min | |
| FOV | 40 × 38 mm2 | 31 × 38 mm2 | 25 × 38 mm2 | 9.6 × 9.6 mm2 | |
| Weight | 950 g | 950 g | 600 g | - | |
| Dimension | 100 × 80 × 100 mm3 | 100 × 80 × 100 mm3 | 70 × 62 × 110 mm3 | - | |
| Data acquisition/ processing system | Platform | EC-12R | EC-12R | EC-12R | AMI US/OA platform |
| Sampling rate | 40 MHz | 40 MHz | 40 MHz | 200 MHz | |
| Author | Lin et al. [64] | Park et al. [32] | Zhang et al. [31] | Qin et al. [65] | |
|---|---|---|---|---|---|
| Laser | Wavelength | 532 nm | 532 nm | 532 nm | 532 nm |
| Pulse duration | 5 ns | - | - | 8 ns | |
| PRF | 88 kHz | 50 kHz | 10 kHz | 10 kHz | |
| Light delivery | Fiber | Fiber | Fiber | Fiber | |
| Probe | Scanning aids | 2D MEMS | 2D MEMS | 2D galvo | 2D MEMS |
| Scanning type | Mirror | Mirror | Mirror | Mirror | |
| UST type | Single element | Single element | Single element | Single element | |
| # of elements | 1 | 1 | 1 | 1 | |
| Center frequency | 50 MHz | 50 MHz | 15 MHz | 10 MHz | |
| Bandwidth | - | - | - | 60% | |
| Resolution | A, L: 26, 5 μm | A, L: 30, 12 μm | A, L: 113, 9 μm | A, L: 120, 3.7 μm | |
| Scan time | 0.5 s | 20 s | 16 s | - | |
| FOV | 2.5 × 2.0 × 0.5 mm3 | 2.8 × 2 mm2 | 2 × 2 mm2 | 2 × 2 mm2 | |
| Weight | - | 162 g | - | - | |
| Dimension | 80 × 115 × 150 mm3 | 12 cm | - | 65 × 30 × 18 mm3 | |
| Data acquisition/ processing system | Platform | ATS9350 | NI PCIe-6321 | A DAQ card | NI PCI-5122 |
| Sampling rate | 250 MHz | - | 200 MHz | 100 MHz | |
| Author | Jiang et al. [69] | Holzwarth et al. [70] | Fournelle et al. [68] | Chen et al. [67] | Knauer et al. [50] | |
|---|---|---|---|---|---|---|
| Laser | Wavelength | 690 nm | 660–1300 nm | 532/1024 nm | 532/588 nm | 680–950 nm |
| Pulse duration | - | 4–10 ns | 3–10 ns | - | - | |
| PRF | 10 Hz | 25 Hz | 10–20 Hz | 500 kHz | 10 Hz | |
| Light delivery | Fiber | Fiber | Fiber | Fiber | Fiber | |
| Probe | Scanning aids | GPS sensor | Optical pattern | Optical tracker | Resonant galvo | - |
| Scanning type | Freehand | Freehand | Freehand | Freehand + mirror | Freehand + direct | |
| UST type | 1D linear | 1D concave | 1D linear | Single element | 2D hemispherical | |
| # Of elements | 128 | 256 | 128 | 1 | 256 | |
| Center frequency | 7.5 MHz | 4 MHz | 7.5 MHz | - | 4 MHz | |
| Bandwidth | 73% | - | - | - | 100% | |
| Resolution | L, E: 237, 333 μm | - | L, E: 600, 1100 μm | A, L: 39, 6 μm | S: 200 μm | |
| Scan time | 240 mm/min | - | 15 s | 0.1–0.2 s | - | |
| FOV | 45 × 38 × 38 mm3 | - | - | 1.7 × 5 mm2 | 50 × 70 × 15 mm3 | |
| Weight | - | - | - | 158 g | - | |
| Dimension | - | - | - | 59 × 30 × 44 mm3 | - | |
| Data acquisition/ processing system | Platform | A DAQ card | MSOT Acuity Echo | DiPhAS | - | Custom DAQ |
| Sampling rate | 40 MHz | - | 80 MHz | - | 40 MHz | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, C.; Kim, C.; Park, B. Review of Three-Dimensional Handheld Photoacoustic and Ultrasound Imaging Systems and Their Applications. Sensors 2023, 23, 8149. https://doi.org/10.3390/s23198149
Lee C, Kim C, Park B. Review of Three-Dimensional Handheld Photoacoustic and Ultrasound Imaging Systems and Their Applications. Sensors. 2023; 23(19):8149. https://doi.org/10.3390/s23198149
Chicago/Turabian StyleLee, Changyeop, Chulhong Kim, and Byullee Park. 2023. "Review of Three-Dimensional Handheld Photoacoustic and Ultrasound Imaging Systems and Their Applications" Sensors 23, no. 19: 8149. https://doi.org/10.3390/s23198149
APA StyleLee, C., Kim, C., & Park, B. (2023). Review of Three-Dimensional Handheld Photoacoustic and Ultrasound Imaging Systems and Their Applications. Sensors, 23(19), 8149. https://doi.org/10.3390/s23198149