
Multimodal Assessment of Cognitive Workload Using Neural, Subjective and Behavioural Measures in Smart Factory Settings



Abstract
:1. Introduction
2. Methodology
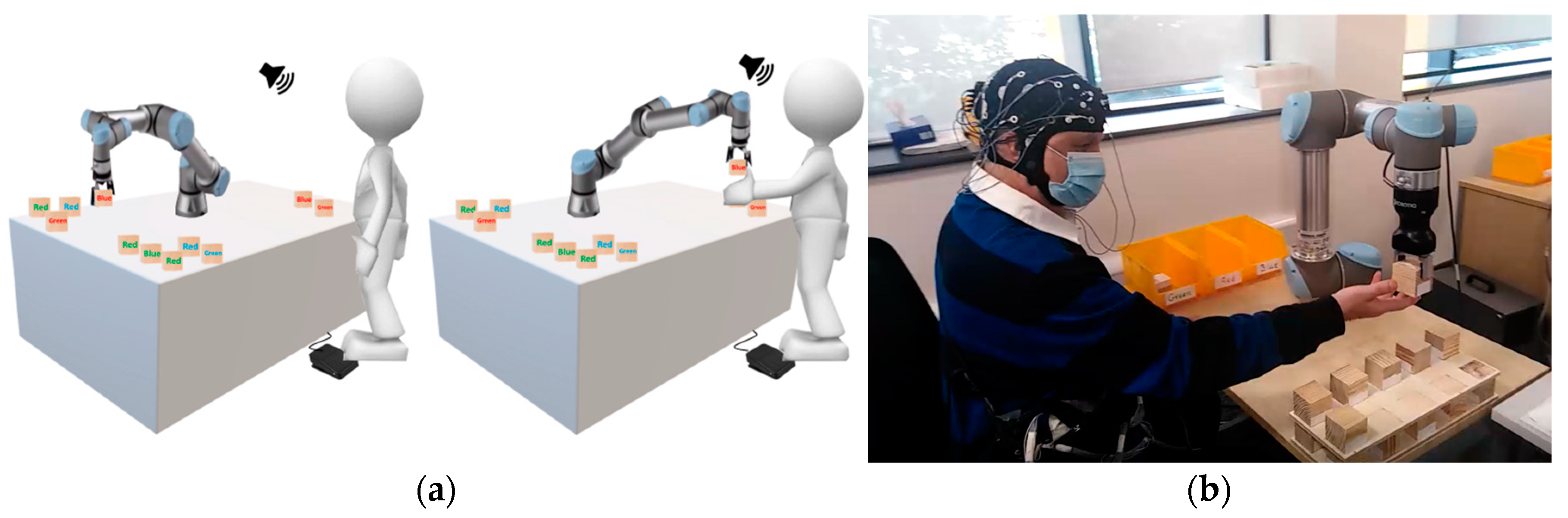
2.1. Experimental Paradigm
2.2. Data Acquisition
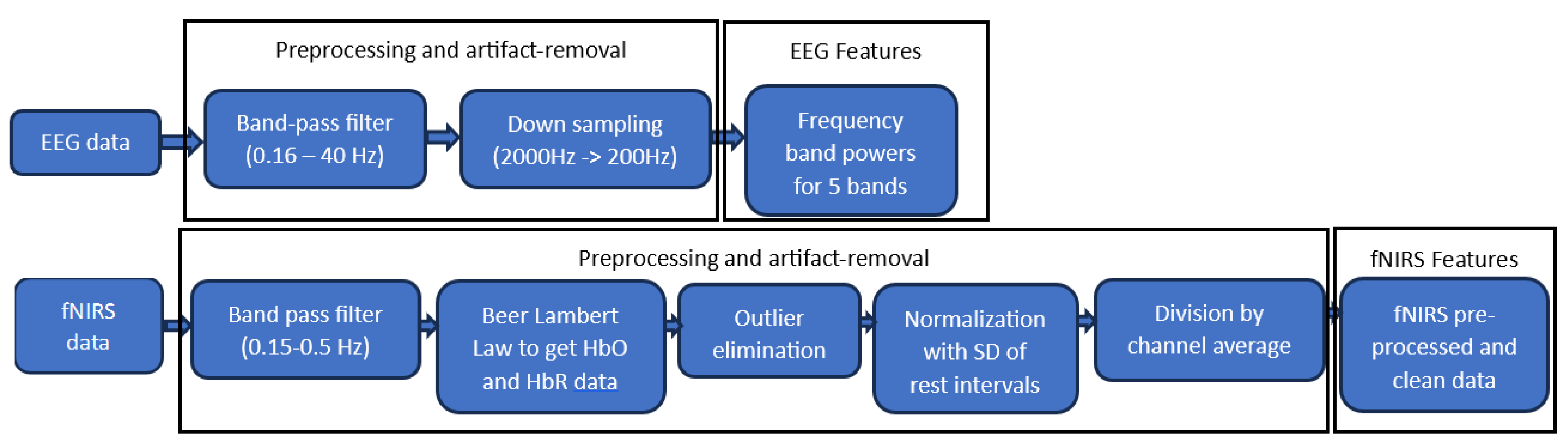
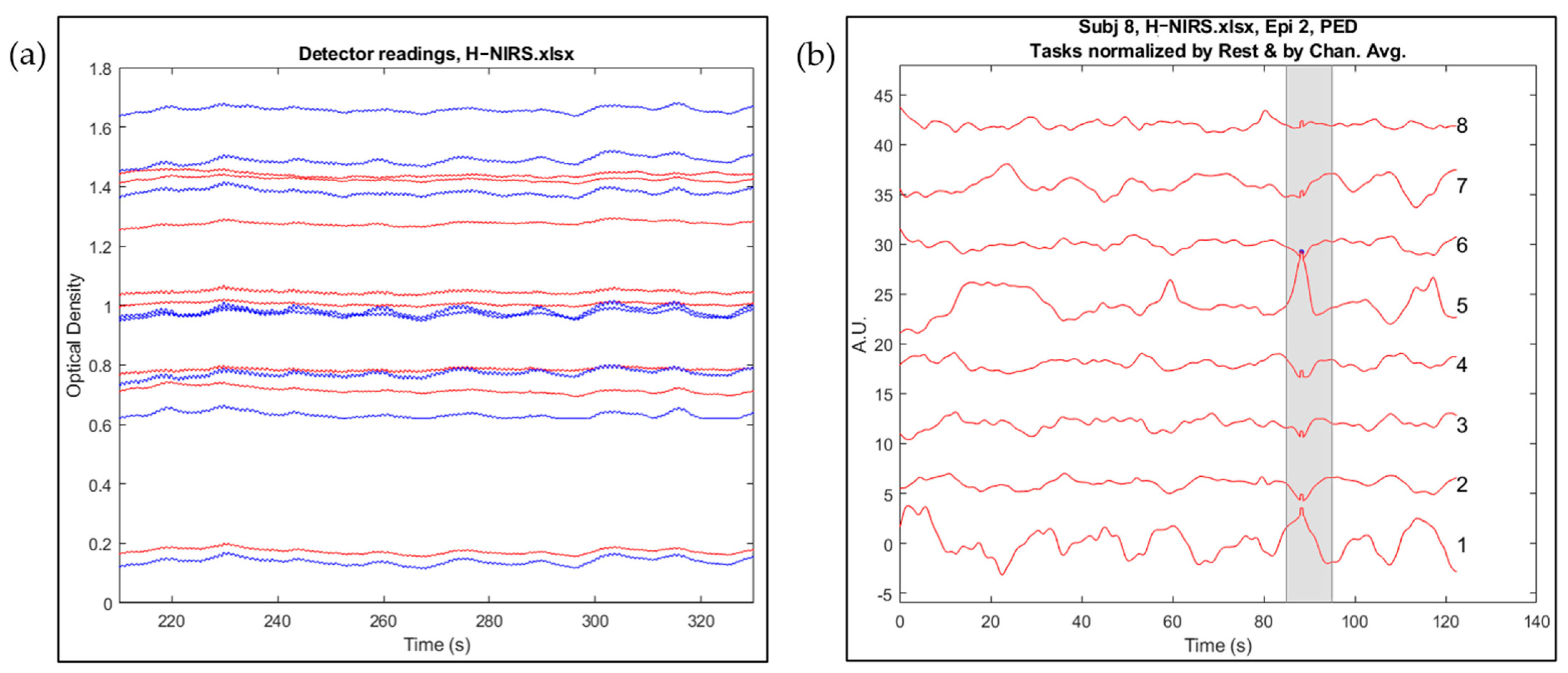
2.3. Data Pre-Processing and Artefacts Removal
2.4. Use of Machine Learning and Statistical Analysis for Prediction of Traditional Measures Using Physiological Measures
3. Results and Discussion
3.1. Impact of Performance Variables on Cognitive Stress Considering Subjective Measure—NASA-TLX
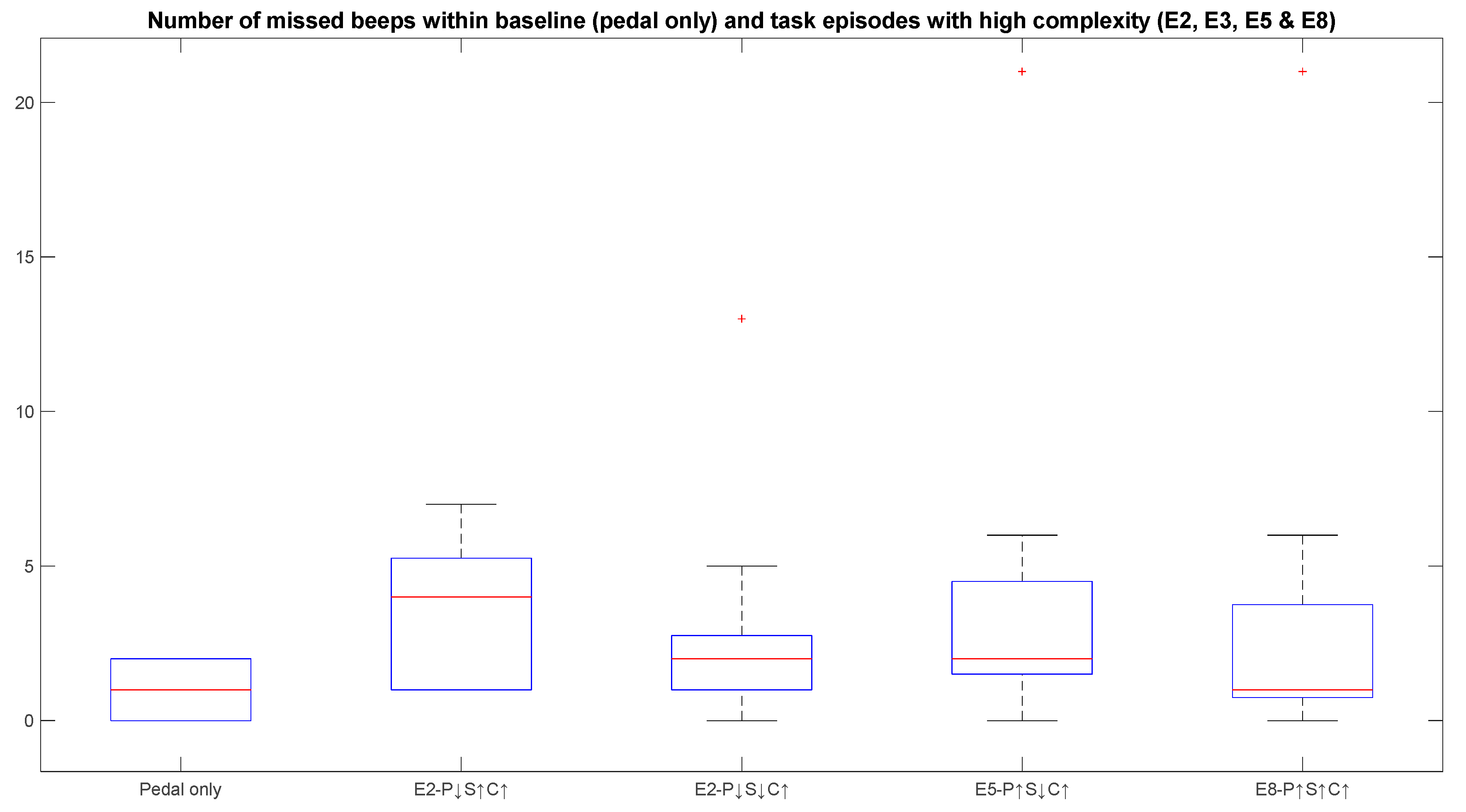
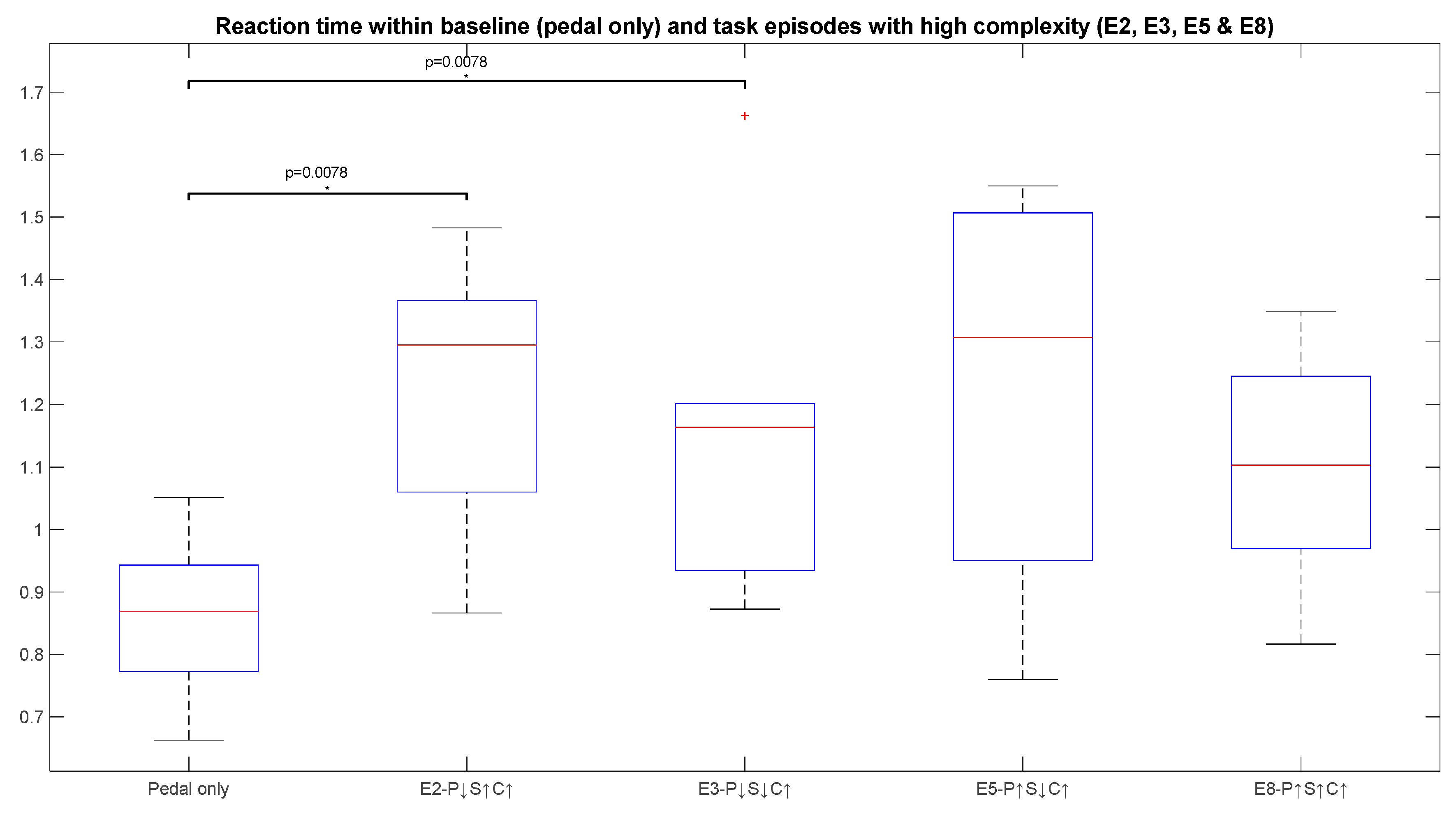
3.2. Impact of Performance Variables on Cognitive Stress Considering Behavioural Measures—Reaction Time and Missed Beeps
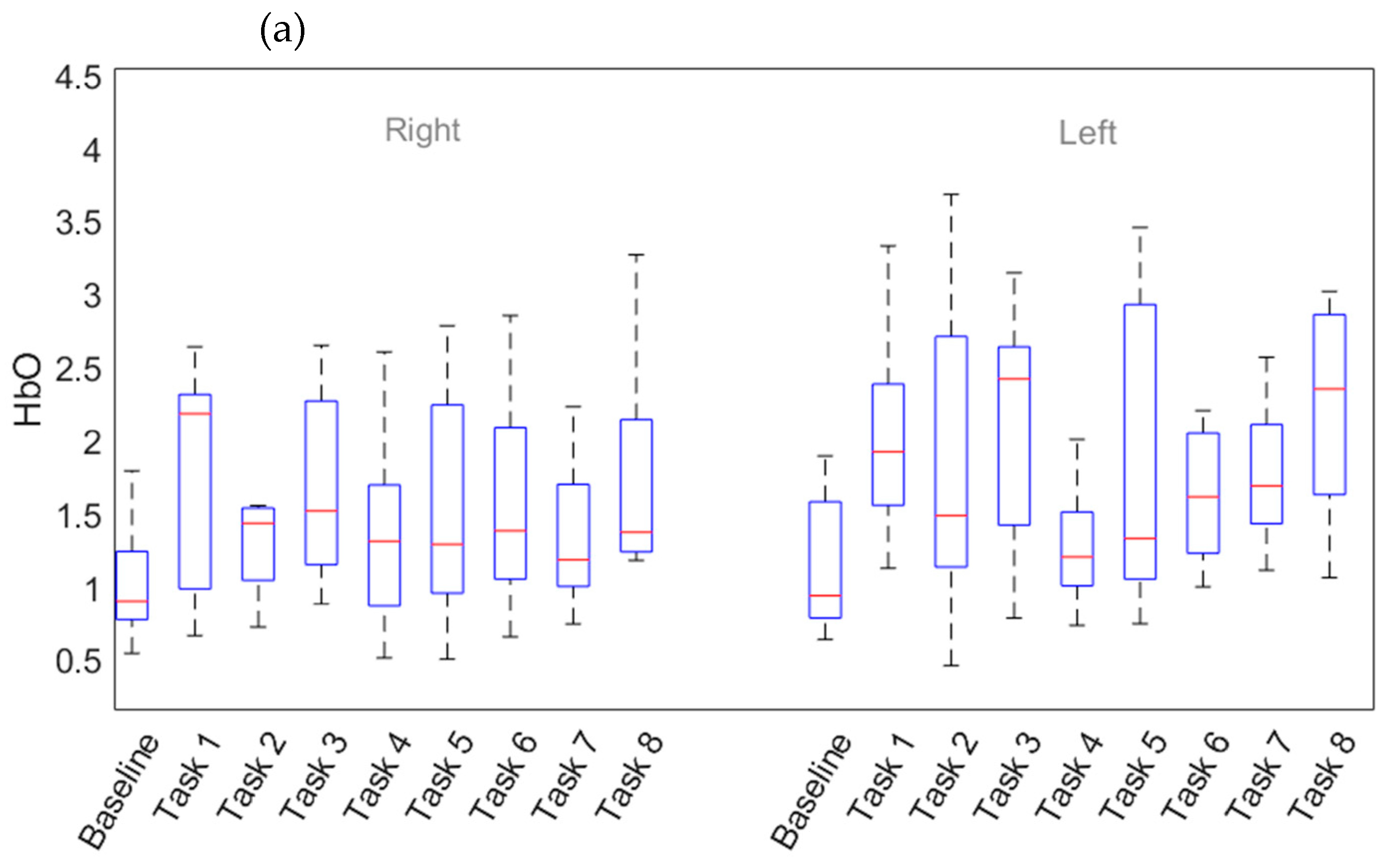
3.3. Impact of Performance Variables on Cognitive Stress Considering Physiological Measures—EEG and fNIRS
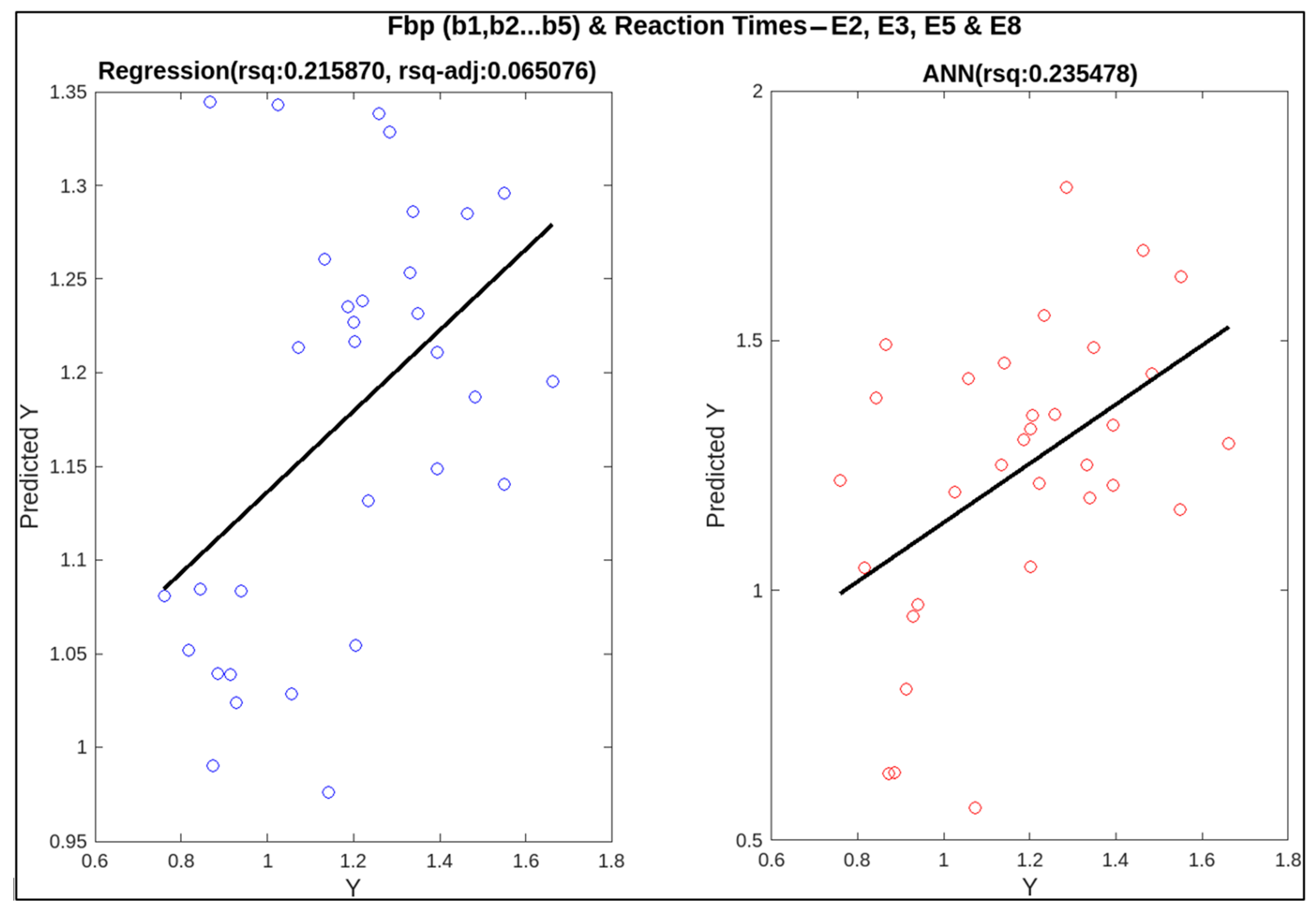
3.4. Prediction of Performance and Subjective Experience from Physiological Variables
3.5. Classification Results Using KNN for Prediction of Behavioural and Subjective Measures Using EEG and fNIRS Features
4. Challenges and Future Work
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Eimontaite, I.; Gwilt, I.; Cameron, D.; Aitken, J.M.; Rolph, J.; Mokaram, S.; Law, J. Language-free graphical signage improves human performance and reduces anxiety when working collaboratively with robots. Int. J. Adv. Manuf. Technol. 2019, 100, 55–73. [Google Scholar] [CrossRef]
- Kumar, S.; Savur, C.; Sahin, F. Survey of Human–Robot Collaboration in Industrial Settings: Awareness, Intelligence, and Compliance. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 280–297. [Google Scholar] [CrossRef]
- D’Souza, F.; Costa, J.; Pires, J.N. Development of a solution for adding a collaborative robot to an industrial AGV. Ind. Robot. Int. J. Robot. Res. Appl. 2020, 47, 723–735. [Google Scholar] [CrossRef]
- Khalid, A.; Kirisci, P.; Ghrairi, Z.; Thoben, K.-D.; Pannek, J. A methodology to develop collaborative robotic cyber physical systems for production environments. Logist. Res. 2016, 9, 23. [Google Scholar] [CrossRef]
- Arai, T.; Kato, R.; Fujita, M. Assessment of operator stress induced by robot collaboration in assembly. CIRP Ann. 2010, 59, 5–8. [Google Scholar] [CrossRef]
- Cardoso, A.; Colim, A.; Bicho, E.; Braga, A.C.; Menozzi, M.; Arezes, P. Ergonomics and Human Factors as a Requirement to Implement Safer Collaborative Robotic Workstations: A Literature Review. Safety 2021, 7, 71. [Google Scholar] [CrossRef]
- Ender, J.; Wagner, J.C.; Kunert, G.; Larek, R.; Pawletta, T.; Guo, F.B. Design of an Assisting Workplace Cell for Human-Robot Collaboration. In Proceedings of the 2019 International Interdisciplinary PhD Workshop (IIPhDW), Wismar, Germany, 15–17 May 2019. [Google Scholar]
- Zakeri, Z.; Omurtag, A.; Breedon, P.; Hilliard, G.; Khalid, A. Studying Mental Stress Factor in Occupational Safety in the Context of the Smart Factory. In Proceedings of the 31st European Safety and Reliability Conference, ESREL 2021, Angers, France, 19–23 September 2021; pp. 92–99. [Google Scholar] [CrossRef]
- Koppenborg, M.; Nickel, P.; Naber, B.; Lungfiel, A.; Huelke, M. Effects of movement speed and predictability in human-robot collaboration. Hum. Factors Ergon. Manuf. Serv. Ind. 2017, 27, 197–209. [Google Scholar] [CrossRef]
- Nomura, T.; Suzuki, T.; Kanda, T.; Kato, K. Measurement of Anxiety toward Robots. In Proceedings of the ROMAN 2006—The 15th IEEE International Symposium on Robot and Human Interactive Communication, Hatfield, UK, 6–8 September 2006; pp. 372–377. [Google Scholar]
- Bjorling, E.A.; Xu, W.M.; Cabrera, M.E.; Cakmak, M. The Effect of Interaction and Design Participation on Teenagers’ Attitudes towards Social Robots. In Proceedings of the 2019 28th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), New Delhi, India, 14–18 October 2019; pp. 1–7. [Google Scholar]
- Rossato, C.; Pluchino, P.; Cellini, N.; Jacucci, G.; Spagnolli, A.; Gamberini, L. Facing with Collaborative Robots: The Subjective Experience in Senior and Younger Workers. Cyberpsychol. Behav. Soc. Netw. 2021, 24, 349–356. [Google Scholar] [CrossRef]
- Gervasi, R.; Aliev, K.; Mastrogiacomo, L.; Franceschini, F. User Experience and Physiological Response in Human-Robot Collaboration: A Preliminary Investigation. J. Intell. Robot. Syst. 2022, 106, 36. [Google Scholar] [CrossRef]
- Zakeri, Z.; Khalid, A.; Omurtag, A.; Hilliard, G.; Breedon, P. Building Trust and safety Correlates for Autonomous Systems using Physiological, Behavioral, and Subjective Measures. In Proceedings of the 13th International Conference on Applied Human Factors and Ergonomics (AHFE 2022), New York, NY, USA, 24–28 July 2022. [Google Scholar]
- Roy, R.N.; Drougard, N.; Gateau, T.; Dehais, F.; Chanel, C.P.C. How can physiological computing benefit human-robot interaction? Robotics 2020, 9, 100. [Google Scholar] [CrossRef]
- Ayaz, H.; Dehais, F. Neuroergonomics. In Handbook of Human Factors and Ergonomics; John Wiley & Sons: Hoboken, NJ, USA, 2021; pp. 816–841. [Google Scholar] [CrossRef]
- Karim, H.; Schmidt, B.; Dart, D.; Beluk, N.; Huppert, T. Functional near-infrared spectroscopy (fNIRS) of brain function during active balancing using a video game system. Gait Posture 2012, 35, 367–372. [Google Scholar] [CrossRef]
- Kim, H.-G.; Cheon, E.-J.; Bai, D.-S.; Lee, Y.H.; Koo, B.-H. Stress and Heart Rate Variability: A Meta-Analysis and Review of the Literature. Psychiatry Investig. 2018, 15, 235–245. [Google Scholar] [CrossRef]
- Zakeri, Z.; Mansfield, N.; Sunderland, C.; Omurtag, A. Physiological correlates of cognitive load in laparoscopic surgery. Sci. Rep. 2020, 10, 12927. [Google Scholar] [CrossRef]
- Arif, A.; Khan, M.J.; Javed, K.; Sajid, H.; Rubab, S.; Naseer, N.; Khan, T.I. Hemodynamic Response Detection Using Integrated EEG-fNIRS-VPA for BCI. Comput. Mater. Contin. 2021, 70, 535–555. [Google Scholar] [CrossRef]
- Bugg, J.M.; Jacoby, L.L.; Toth, J.P. Multiple levels of control in the Stroop task. Mem. Cogn. 2008, 36, 1484–1494. [Google Scholar] [CrossRef]
- Jin, K.; Rubio-Solis, A.; Naik, R.; Onyeogulu, T.; Islam, A.; Khan, S.; Teeti, I.; Kinross, J.; Leff, D.R.; Cuzzolin, F.; et al. Identification of Cognitive Workload during Surgical Tasks with Multimodal Deep Learning. Available online: www.artinis.com (accessed on 9 May 2023).
- Argyle, E.M.; Marinescu, A.; Wilson, M.L.; Lawson, G.; Sharples, S. Physiological indicators of task demand, fatigue, and cognition in future digital manufacturing environments. Int. J. Hum.-Comput. Stud. 2021, 145, 102522. [Google Scholar] [CrossRef]
- Hart, S.G. Nasa-Task Load Index (NASA-TLX); 20 Years Later. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2016, 50, 904–908. [Google Scholar] [CrossRef]
- Cao, A.; Chintamani, K.K.; Pandya, A.K.; Ellis, R.D. NASA TLX: Software for assessing subjective mental workload. Behav. Res. Methods 2009, 41, 113–117. [Google Scholar] [CrossRef]
- Rubio, S.; Diaz, E.; Martin, J.; Puente, J.M. Evaluation of Subjective Mental Workload: A Comparison of SWAT, NASA-TLX, and Workload Profile Methods. Appl. Psychol. 2004, 53, 61–86. [Google Scholar] [CrossRef]
- Zakeri, Z.; Assecondi, S.; Bagshaw, A.P.; Arvanitis, T.N. Influence of Signal Preprocessing on ICA-Based EEG Decomposition. In Proceedings of the XIII Mediterranean Conference on Medical and Biological Engineering and Computing 2013: MEDICON 2013, Seville, Spain, 25–28 September 2013; pp. 734–737. [Google Scholar]
- Zheng, W.-L.; Lu, B.-L. Investigating Critical Frequency Bands and Channels for EEG-Based Emotion Recognition with Deep Neural Networks. IEEE Trans. Auton. Ment. Dev. 2015, 7, 162–175. [Google Scholar] [CrossRef]
- Oon, H.N.; Saidatul, A.; Ibrahim, Z. Analysis on Non-Linear Features of Electroencephalogram (EEG) Signal for Neuromarketing Application. In Proceedings of the 2018 International Conference on Computational Approach in Smart Systems Design and Applications (ICASSDA), Kuching, Malaysia, 15–17 August 2018; pp. 1–8. [Google Scholar]
- Herff, C.; Heger, D.; Fortmann, O.; Hennrich, J.; Putze, F.; Schultz, T. Mental workload during n-back task—Quantified in the prefrontal cortex using fNIRS. Front. Hum. Neurosci. 2014, 7, 935. [Google Scholar] [CrossRef]
- Scholkmann, F.; Kleiser, S.; Metz, A.J.; Zimmermann, R.; Pavia, J.M.; Wolf, U.; Wolf, M. A review on continuous wave functional near-infrared spectroscopy and imaging instrumentation and methodology. NeuroImage 2014, 85, 6–27. [Google Scholar] [CrossRef] [PubMed]
- Omurtag, A.; Aghajani, H.; Keles, H.O. Decoding human mental states by whole-head EEG+fNIRS during category fluency task performance. J. Neural Eng. 2017, 14, 066003. [Google Scholar] [CrossRef]
- Bell, J. What is machine learning? In Machine Learning and the City: Applications in Architecture and Urban Design; John Wiley & Sons: Hoboken, NJ, USA, 2022; pp. 209–216. [Google Scholar] [CrossRef]
- Schmidt, A.F.; Finan, C. Linear regression and the normality assumption. J. Clin. Epidemiol. 2018, 98, 146–151. [Google Scholar] [CrossRef]
- Zupan, J. Introduction to Artificial Neural Network (ANN) Methods: What They Are and How to Use Them. Acta Chim. Slov. 1994, 41, 327–352. [Google Scholar]
- Aziz, R.M.; Hussain, A.; Sharma, P.; Kumar, P. Machine learning-based soft computing regression analysis approach for crime data prediction. Karbala Int. J. Mod. Sci. 2022, 8, 1. [Google Scholar] [CrossRef]
- Zakeri, Z.; Mansfield, N.; Sunderland, C.; Omurtag, A. Cross-validating models of continuous data from simulation and experiment by using linear regression and artificial neural networks. Inform. Med. Unlocked 2020, 21, 100457. [Google Scholar] [CrossRef]
- Capa, R.L.; Audiffren, M.; Ragot, S. The effects of achievement motivation, task difficulty, and goal difficulty on physiological, behavioral, and subjective effort. Psychophysiology 2008, 45, 859–868. [Google Scholar] [CrossRef]
- Raveh, D.; Lavie, N. Load-induced inattentional deafness. Atten. Percept. Psychophys. 2015, 77, 483–492. [Google Scholar] [CrossRef]
- Yan, Y.; Jia, Y. A Review on Human Comfort Factors, Measurements, and Improvements in Human–Robot Collaboration. Sensors 2022, 22, 7431. [Google Scholar] [CrossRef]
- Yasin, S.; Hussain, S.A.; Aslan, S.; Raza, I.; Muzammel, M.; Othmani, A. EEG based Major Depressive disorder and Bipolar disorder detection using Neural Networks: A review. Comput. Methods Programs Biomed. 2021, 202, 106007. [Google Scholar] [CrossRef]
- Zhu, Q.; Du, J.; Shi, Y.; Wei, P. Neurobehavioral assessment of force feedback simulation in industrial robotic teleoperation. Autom. Constr. 2021, 126, 103674. [Google Scholar] [CrossRef]
- Serrien, D.J.; Sovijärvi-Spapé, M.M. Manual dexterity: Functional lateralisation patterns and motor efficiency. Brain Cogn. 2016, 108, 42–46. [Google Scholar] [CrossRef] [PubMed]
- Shin, K.-S.; Lee, T.S.; Kim, H.-J. An Application of Support Vector Machines in Bankruptcy Prediction Model. Expert Syst. Appl. 2005, 28, 127–135. [Google Scholar] [CrossRef]
- Al-Shargie, F.; Tang, T.B.; Kiguchi, M. Stress Assessment Based on Decision Fusion of EEG and fNIRS Signals. IEEE Access 2017, 5, 19889–19896. [Google Scholar] [CrossRef]
- Al-Shargie, F.; Kiguchi, M.; Badruddin, N.; Dass, S.C.; Hani, A.F.M.; Tang, T.B. Mental stress assessment using simultaneous measurement of EEG and fNIRS. Biomed. Opt. Express 2016, 7, 3882–3898. [Google Scholar] [CrossRef] [PubMed]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Episode No. | Cobot Speed | Payload Capacity | Task Complexity |
|---|---|---|---|
| 1 | L | L | L |
| 2 | L | H | H |
| 3 | H | L | H |
| 4 | H | H | L |
| 5 | L | L | H |
| 6 | L | H | L |
| 7 | H | L | L |
| 8 | H | H | H |
| EEG Bands | Payload Changing | Speed Changing | Complexity Changing | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| E1(P↓S↓C↓) vs. E7(P↑S↓C↓) | E2(P↓S↑C↑) vs. E8(P↑S↑C↑) | E1(P↓S↓C↓) vs. E4(P↓S↑C↓) | E5(P↑S↓C↑) vs. E8(P↑S↑C↑) | E1(P↓S↓C↓) vs. E3(P↓S↓C↑) | E6(P↑S↑C↓) vs. E8(P↑S↑C↑) | |||||||||||||
| Average Relative Power | p-Value | Average Relative Power | p-Value | Average Relative Power | p-Value | Average Relative Power | p-Value | Average Relative Power | p-Value | Average Relative Power | p-Value | |||||||
| E1 | E7 | E2 | E8 | E1 | E4 | E5 | E8 | E1 | E3 | E6 | E8 | |||||||
| delta | 0.9113 | 0.912 | 0.8203 | 0.9191 | 0.9226 | 1 | 0.9113 | 0.9094 | 0.6523 | 0.9175 | 0.9226 | 0.3594 | 0.9113 | 0.9226 | 0.3594 | 0.9194 | 0.9226 | 0.4258 |
| theta | 0.2399 | 0.2444 | 0.5703 | 0.2671 | 0.2724 | 0.7344 | 0.2399 | 0.2532 | 0.1641 | 0.2584 | 0.2724 | 0.4258 | 0.2399 | 0.2724 | 0.0273 | 0.261 | 0.2724 | 0.25 |
| alpha | 0.1623 | 0.1654 | 0.6523 | 0.1902 | 0.1979 | 0.7344 | 0.1623 | 0.1621 | 0.8203 | 0.1739 | 0.1979 | 0.0742 | 0.1623 | 0.1979 | 0.0078 | 0.178 | 0.1979 | 0.0195 |
| beta1 | 0.1118 | 0.1056 | 1 | 0.1363 | 0.1478 | 0.4258 | 0.1118 | 0.0982 | 0.3594 | 0.1178 | 0.1478 | 0.0742 | 0.1118 | 0.1478 | 0.0391 | 0.1228 | 0.1478 | 0.0039 |
| beta2 | 0.0925 | 0.0709 | 0.4258 | 0.0987 | 0.1102 | 0.6523 | 0.0925 | 0.0601 | 0.0977 | 0.0871 | 0.1102 | 0.1641 | 0.0925 | 0.1102 | 0.4258 | 0.0922 | 0.1102 | 0.1289 |
| beta3 | 0.0744 | 0.0473 | 0.25 | 0.0886 | 0.0941 | 1 | 0.0744 | 0.0424 | 0.1289 | 0.0652 | 0.0941 | 0.0977 | 0.0744 | 0.0941 | 0.4258 | 0.073 | 0.0941 | 0.0547 |
| beta4 | 0.0682 | 0.0283 | 0.1641 | 0.0741 | 0.0744 | 0.9102 | 0.0682 | 0.033 | 0.0547 | 0.0466 | 0.0744 | 0.0977 | 0.0682 | 0.0744 | 0.8203 | 0.0556 | 0.0744 | 0.25 |
| gamma | 0.0398 | 0.0077 | 0.3594 | 0.0499 | 0.0492 | 0.7344 | 0.0398 | −0.0048 | 0.0391 | 0.0238 | 0.0492 | 0.1289 | 0.0398 | 0.0492 | 1 | 0.033 | 0.0492 | 0.4961 |
| EEG Bands | Payload & Speed Changing | Payload & Complexity Changing | Speed & Complexity Changing | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| E1(P↓S↓C↓) vs. E6(P↑S↑C↓) | E3(P↓S↓C↑) vs. E8(P↑S↑C↑) | E1(P↓S↓C↓) vs. E5(P↑S↓C↑) | E4(P↓S↑C↓) vs. E8(P↑S↑C↑) | E1(P↓S↓C↓) vs. E2(P↓S↑C↑) | E7(P↑S↓C↓) vs. E8(P↑S↑C↑) | |||||||||||||
| Average Relative Power | p-Value | Average Relative Power | p-Value | Average Relative Power | p-Value | Average Relative Power | p-Value | Average Relative Power | p-Value | Average Relative Power | p-Value | |||||||
| E1 | E6 | E3 | E8 | E1 | E5 | E4 | E8 | E1 | E2 | E7 | E8 | |||||||
| delta | 0.9113 | 0.9194 | 0.4258 | 0.9068 | 0.9226 | 0.4258 | 0.9113 | 0.9175 | 0.3008 | 0.9094 | 0.9226 | 0.3008 | 0.9113 | 0.9191 | 0.9102 | 0.912 | 0.9226 | 0.1289 |
| theta | 0.2399 | 0.261 | 0.0391 | 0.2473 | 0.2724 | 0.25 | 0.2399 | 0.2584 | 0.0039 | 0.2532 | 0.2724 | 0.2031 | 0.2399 | 0.2671 | 0.0078 | 0.2444 | 0.2724 | 0.0078 |
| alpha | 0.1623 | 0.178 | 0.1641 | 0.1686 | 0.1979 | 0.2031 | 0.1623 | 0.1739 | 0.0977 | 0.1621 | 0.1979 | 0.0391 | 0.1623 | 0.1902 | 0.0039 | 0.1654 | 0.1979 | 0.0117 |
| beta1 | 0.1118 | 0.1228 | 0.4961 | 0.1114 | 0.1478 | 0.0742 | 0.1118 | 0.1178 | 0.9102 | 0.0982 | 0.1478 | 0.0273 | 0.1118 | 0.1363 | 0.0039 | 0.1056 | 0.1478 | 0.0078 |
| beta2 | 0.0925 | 0.0922 | 1 | 0.0772 | 0.1102 | 0.25 | 0.0925 | 0.0871 | 0.4258 | 0.0601 | 0.1102 | 0.0547 | 0.0925 | 0.0987 | 0.4258 | 0.0709 | 0.1102 | 0.0391 |
| beta3 | 0.0744 | 0.073 | 0.9102 | 0.0533 | 0.0941 | 0.1641 | 0.0744 | 0.0652 | 0.4258 | 0.0424 | 0.0941 | 0.0547 | 0.0744 | 0.0886 | 0.0742 | 0.0473 | 0.0941 | 0.0117 |
| beta4 | 0.0682 | 0.0556 | 0.5703 | 0.0392 | 0.0744 | 0.25 | 0.0682 | 0.0466 | 0.0977 | 0.033 | 0.0744 | 0.0547 | 0.0682 | 0.0741 | 0.3594 | 0.0283 | 0.0744 | 0.0117 |
| gamma | 0.0398 | 0.033 | 0.9102 | 0.0038 | 0.0492 | 0.2031 | 0.0398 | 0.0238 | 0.1641 | −0.0048 | 0.0492 | 0.0977 | 0.0398 | 0.0499 | 0.25 | 0.0077 | 0.0492 | 0.0742 |
| EEG Bands | Payload, Speed and Complexity Changing | ||
|---|---|---|---|
| E1 (P↓S↓C↓) vs. E8 (P↑S↑C↑) | |||
| Average Relative Power | p-Value | ||
| E1 | E8 | ||
| delta | 0.9113 | 0.9226 | 0.3594 |
| theta | 0.2399 | 0.2724 | 0.0273 |
| alpha | 0.1623 | 0.1979 | 0.0078 |
| beta1 | 0.1118 | 0.1478 | 0.0391 |
| beta2 | 0.0925 | 0.1102 | 0.4258 |
| beta3 | 0.0744 | 0.0941 | 0.4258 |
| beta4 | 0.0682 | 0.0744 | 0.8203 |
| gamma | 0.0398 | 0.0492 | 1 |
| Predictors | Target | Episode | Adjusted R-Squared (Regression) |
|---|---|---|---|
| Theta, alpha, b1 | NASA-TLX | All | 0.396 |
| FBP (all bands) | NASA-TLX | All | 0.4037 |
| HbO | NASA-TLX | All | 0.271 |
| HbR | NASA-TLX | All | 0.2322 |
| FBP (all bands), HbO | NASA-TLX | All | 0.326645 |
| FBP (all bands), HbR | NASA-TLX | All | 0.268 |
| Theta, alpha, b1, HbO, HbR | NASA-TLX | All | ~0.34464 |
| Theta, alpha, b1 | Missed beeps | E2, 3, 5, 8 | 0.354 |
| FBP (all bands) | Missed beeps | E2, 3,5,8 | 0.365 |
| HbO | Missed beeps | E2, 3, 5, 8 | 0.3865 |
| Theta, alpha, b1, b2, HbO | Missed beeps | E2, 3, 5, 8 | 0.575948 |
| Theta, alpha, b1, b2, HbR | Missed beeps | E2, 3, 5, 8 | 0.575346 |
| Theta, alpha, b1, HbO, HbR | Missed beeps | E2, 3, 5, 8 | 0.6057 |
| Theta, alpha, b1, b2, HbO, HbR | Missed beeps | E2, 3, 5, 8 | ~0.654146 |
| Theta, alpha, b1 | Reaction time | E2, 3, 5, 8 | 0.081942 |
| b1-5 | Reaction time | E2, 3, 5, 8 | ~0.065 |
| HbO | Reaction time | E2, 3, 5, 8 | 0.262 |
| Theta, alpha, b1, HbO | Reaction time | E2, 3, 5, 8 | 0.213281 |
| Theta, alpha, b1, HbR | Reaction time | E2, 3, 5, 8 | 0.262749 |
| Theta, alpha, b1, HbO, HbR | Reaction time | E2, 3, 5, 8 | 0.259581 |
| Target | Physiological Measure (Predictors) | Leave One Subject out for Test % | Statistical Significance of Classification, p-Values | Leave the Same Subject out from Each Episode for Test % |
|---|---|---|---|---|
| NASA-TLX | All Fbps, HbO, HbR | 56.9 | 0.0860 | 52.8 |
| All Fbps | 69.4 | 0.0007 ** | 54.2 | |
| All Fbps, HbO | 63.9 | 0.0072 ** | 56.9 | |
| All Fbps, HbR | 54.2 | 0.1840 | 50 | |
| HbO | 66.7 | 0.0016 ** | 58.3 | |
| HbR | 52.8 | 0.2385 | 50 | |
| Reaction Times | All Fbps, HbO, HbR | 62.5 | 0.0355 ** | 59.4 |
| All Fbps | 65.6 | 0.0368 ** | 37.5 | |
| All Fbps, HbO | 53.1 | 0.2025 | 59.4 | |
| All Fbps, HbR | 62.5 | 0.0344 ** | 65.6 | |
| HbO | 56.3 | 0.1275 | 43.8 | |
| HbR | 62.5 | 0.0354 ** | 65.6 | |
| Missed Beeps | All Fbps, HbO, HbR | 72.2 | 0.0088 ** | 69.4 |
| All Fbps | 75 | 0.0062 ** | 66.7 | |
| All Fbps, HbO | 75 | 0.0034 ** | 72.2 | |
| All Fbps, HbR | 77.8 | 0.0012 ** | 72.2 | |
| HbO | 75 | 0.0031 ** | 72.2 | |
| HbR | 77.8 | 0.0012 ** | 72.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zakeri, Z.; Arif, A.; Omurtag, A.; Breedon, P.; Khalid, A. Multimodal Assessment of Cognitive Workload Using Neural, Subjective and Behavioural Measures in Smart Factory Settings. Sensors 2023, 23, 8926. https://doi.org/10.3390/s23218926
Zakeri Z, Arif A, Omurtag A, Breedon P, Khalid A. Multimodal Assessment of Cognitive Workload Using Neural, Subjective and Behavioural Measures in Smart Factory Settings. Sensors. 2023; 23(21):8926. https://doi.org/10.3390/s23218926
Chicago/Turabian StyleZakeri, Zohreh, Arshia Arif, Ahmet Omurtag, Philip Breedon, and Azfar Khalid. 2023. "Multimodal Assessment of Cognitive Workload Using Neural, Subjective and Behavioural Measures in Smart Factory Settings" Sensors 23, no. 21: 8926. https://doi.org/10.3390/s23218926
APA StyleZakeri, Z., Arif, A., Omurtag, A., Breedon, P., & Khalid, A. (2023). Multimodal Assessment of Cognitive Workload Using Neural, Subjective and Behavioural Measures in Smart Factory Settings. Sensors, 23(21), 8926. https://doi.org/10.3390/s23218926