1. Introduction
Ship collision is an imperative task for navigation safety at sea [
1]. Unmanned surface vehicles (USVs) have gained significant attention in recent years due to their potential for various applications such as oceanographic research, environmental monitoring, and maritime security [
2]. However, the increasing use of USVs also raises concerns about the safety of navigation, especially when operating in crowded environments [
3]. Collision avoidance is a critical issue that needs to be addressed to ensure safe and efficient navigation of USVs. A USV’s collision avoidance algorithm can be considered a local path-planning algorithm. This paper focuses on local path-planning methods. Many local path-planning algorithms have been reported for collision avoidance against static and dynamic obstacles [
4,
5]. By now, many obstacle avoidance algorithms have been proposed by international scholars, all of which rely more or less on global path planning and mapping, such as a bug algorithm [
6], a vector field histogram method [
7], and an artificial potential field method [
8]. Many improved heuristic algorithms have also been studied for local path planning. For instance, a hybrid adaptive path-planning scheme based on global path planning and local dynamic collision avoidance for unmanned surface vehicles under complex marine environments was proposed in [
9]. This method systematically considers the impact of waves and currents on the navigation of USVs. In recent years, some scholars have emphasized the dynamic collision avoidance of ships by incorporating methods such as reinforcement learning and COLREGS [
10]. Based on literature statistics, 56% of the collisions at sea are caused by the violation of COLREGS by ships [
11]. However, data are difficult to collect in real time, and it is difficult to show a model with mathematical formulas; incorporating regulations in collision prevention algorithms is still a challenge [
12]. Some scholars have tried to design a ship navigation safety domain to solve the ship collision problem [
13,
14,
15]. However, most of them only consider static obstacles or semi-dynamic obstacles that do not change course [
16,
17], a highly ideal motion model is used in collision avoidance [
18], or the balance between efficiency and effectiveness is ignored [
19].
Some other researchers have evaluated collision avoidance trajectories generated from the perspective of risk assessment [
20] using multiple parameters such as navigation risk [
21], navigation smoothness, and other metrics. For instance, a review [
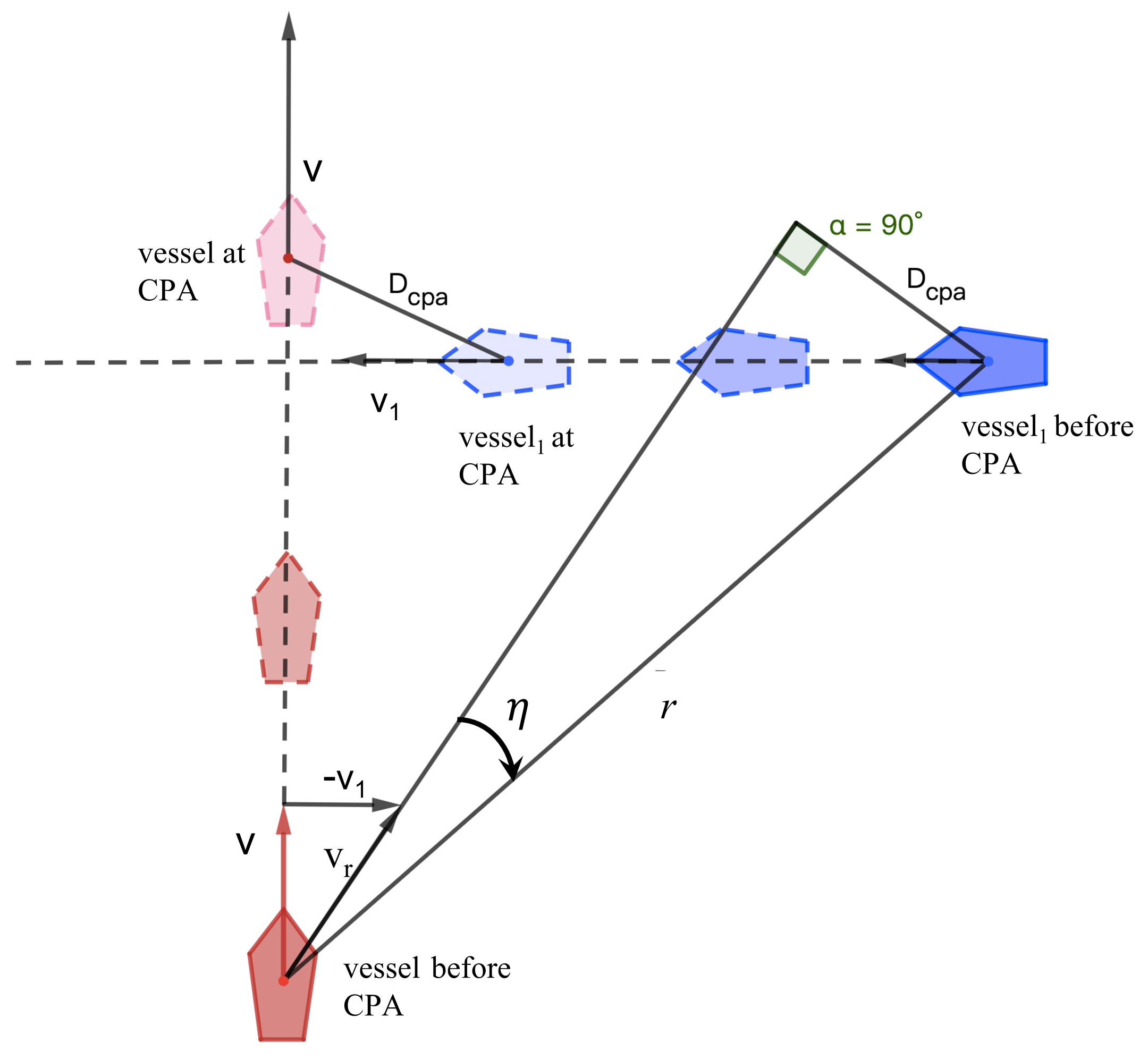
22] described collision risk assessment, but it neglected techniques for conflict resolution. The most frequently used distance parameter for conflict detection and obstacle avoidance is the distance to the closest point of approach
; the time to the closest point of approach
is often used with it. It has been proposed that various techniques can be developed to overcome the limitations of
and
alone for collision avoidance [
23]. In [
24,
25], the authors discussed ASV developments in depth, while conflict detection and obstacle avoidance received a lesser amount of attention. Only a few studies related to reacting to collision avoidance for unmanned ships were included in [
26].
Comparing other obstacle avoidance algorithms, Fox et al. reported a dynamic window approach (DWA) [
27], which has become a popular academic research method in recent years. It is mainly used for navigation and obstacle avoidance in a dynamic environment. Avoiding unpredictable obstacles can better solve the DWA [
28]. DWA is widely used in dynamic obstacle avoidance path optimization of UAVs, robots, and USVs [
29,
30,
31]. Dobrevski reported local path planning based on DWA and deep reinforcement learning to improve path optimization [
32]. Liu developed a global dynamic path-planning fusion algorithm combining the jump-A* algorithm and DWA [
33]. In addition, several useful local path-planning methods based on DWA have been reported [
34]. However, DWA generates path candidates by assuming constant velocities for a certain period of time. Due to the small distances between obstacles and USVs, unexpected collisions often occur during encounters, which makes it challenging to fulfill the safety requirements of USVs. However, DWA generates path candidates by assuming constant velocities for a certain period, making it easy for it to fall into local optima [
35]. In the path evaluation stage, it relies heavily on the settings of the parameter value ranges. For example, when the distance between an obstacle and a USV is small, accidental collisions often occur during the encounter, which is a challenge to meeting the safety requirements of USVs. In addition, the increased complexity of the application scenarios and environments of unmanned devices make standard DWA unable to solve complex path-planning problems. Traditional DWA focuses on path generation at each step of the planning process but ignores that obstacles are also intelligent agents that generate abrupt behavior [
36].
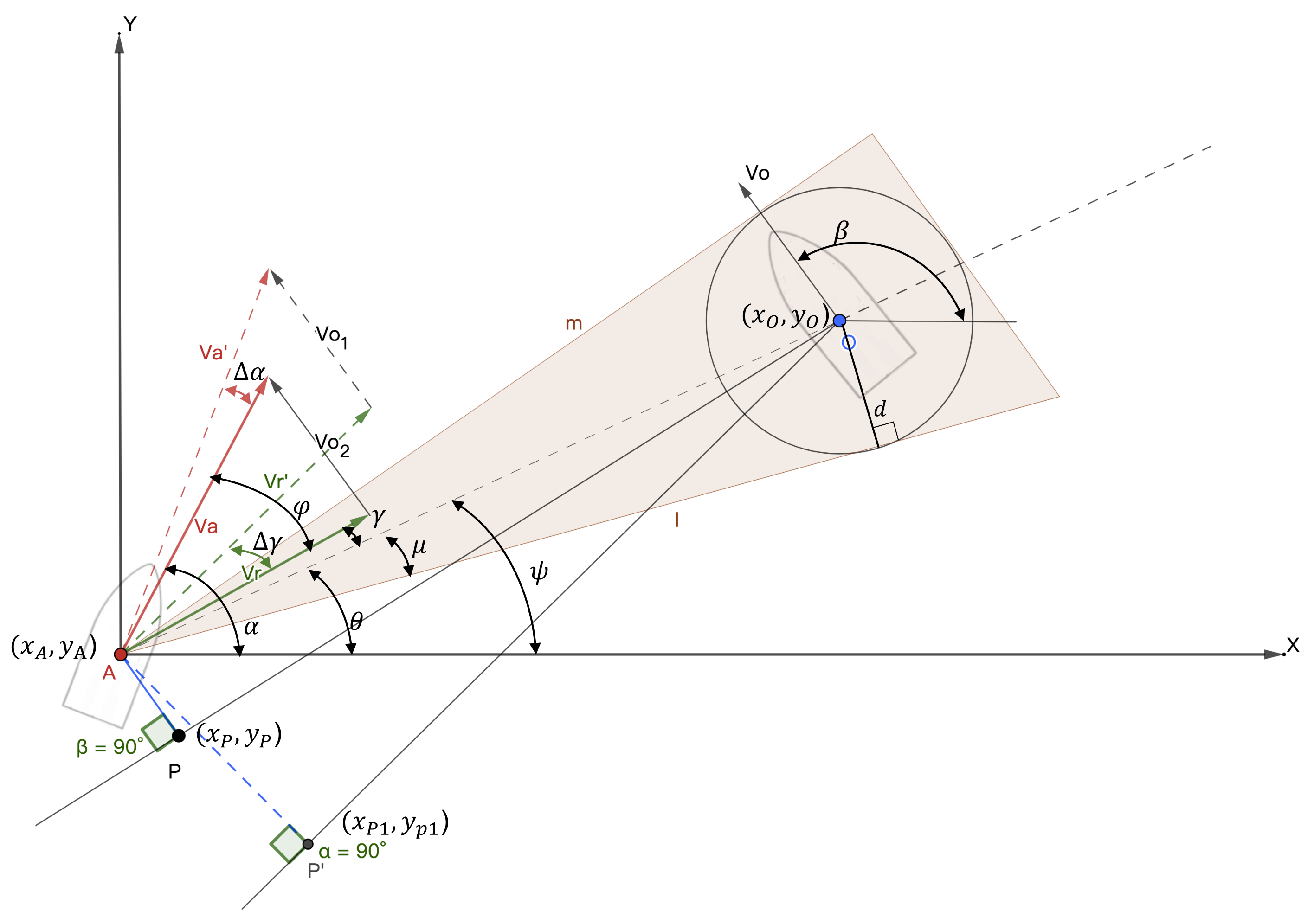
In this study, we present a novel approach to collision avoidance for USVs. While existing methods mainly rely on static obstacle maps or simple heuristics, our approach combines a two-degree-of-freedom model for USV dynamics with a velocity obstacle method for obstacle detection and avoidance. This approach allows for real-time adaptation to dynamic and complex environments, making it particularly suitable for USVs operating in areas with high traffic density or unpredictable obstacles. The resulting collision avoidance algorithm is optimized for USV maneuverability and is capable of handling multiple moving obstacles simultaneously.
The contents of this paper are as follows.
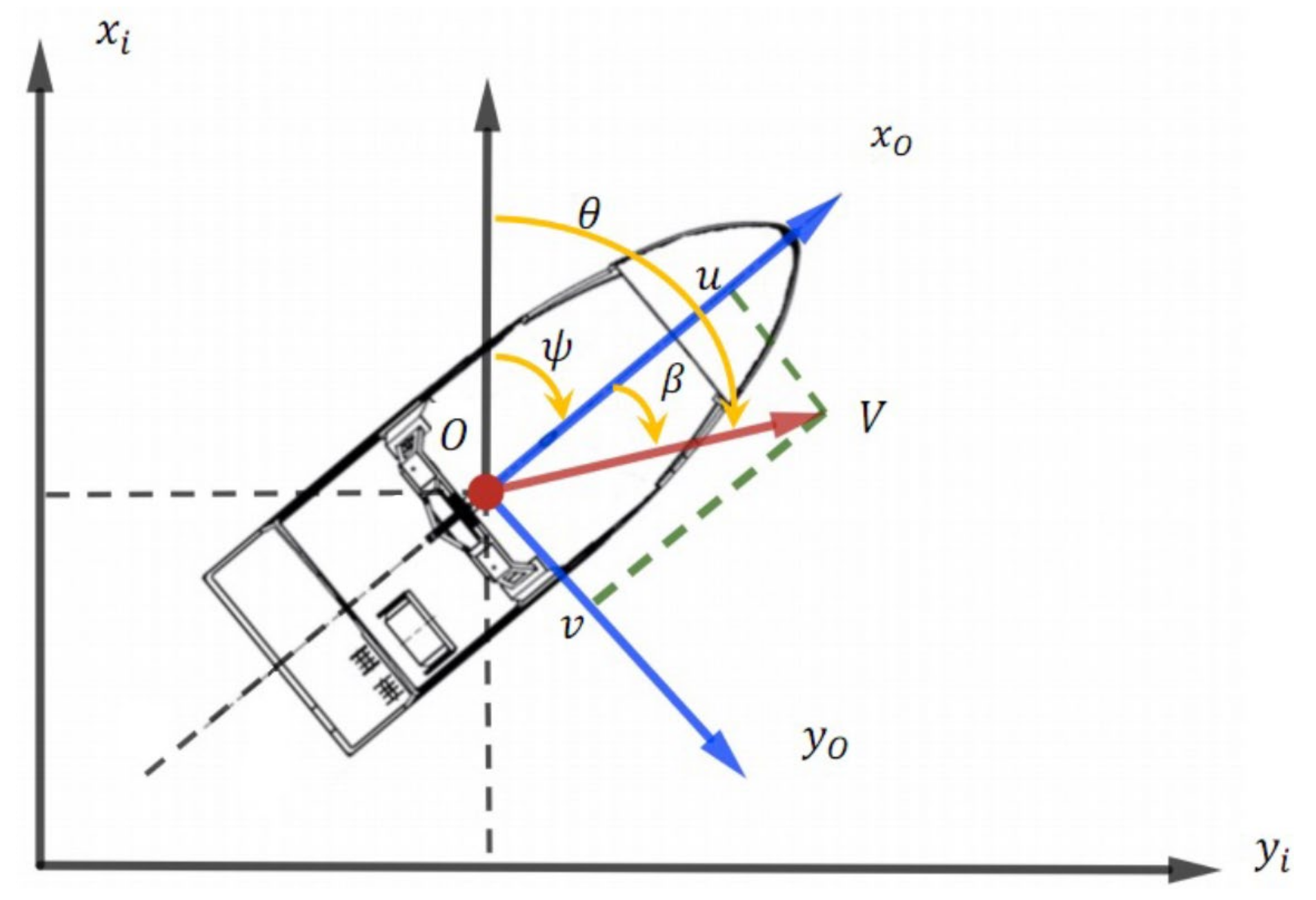
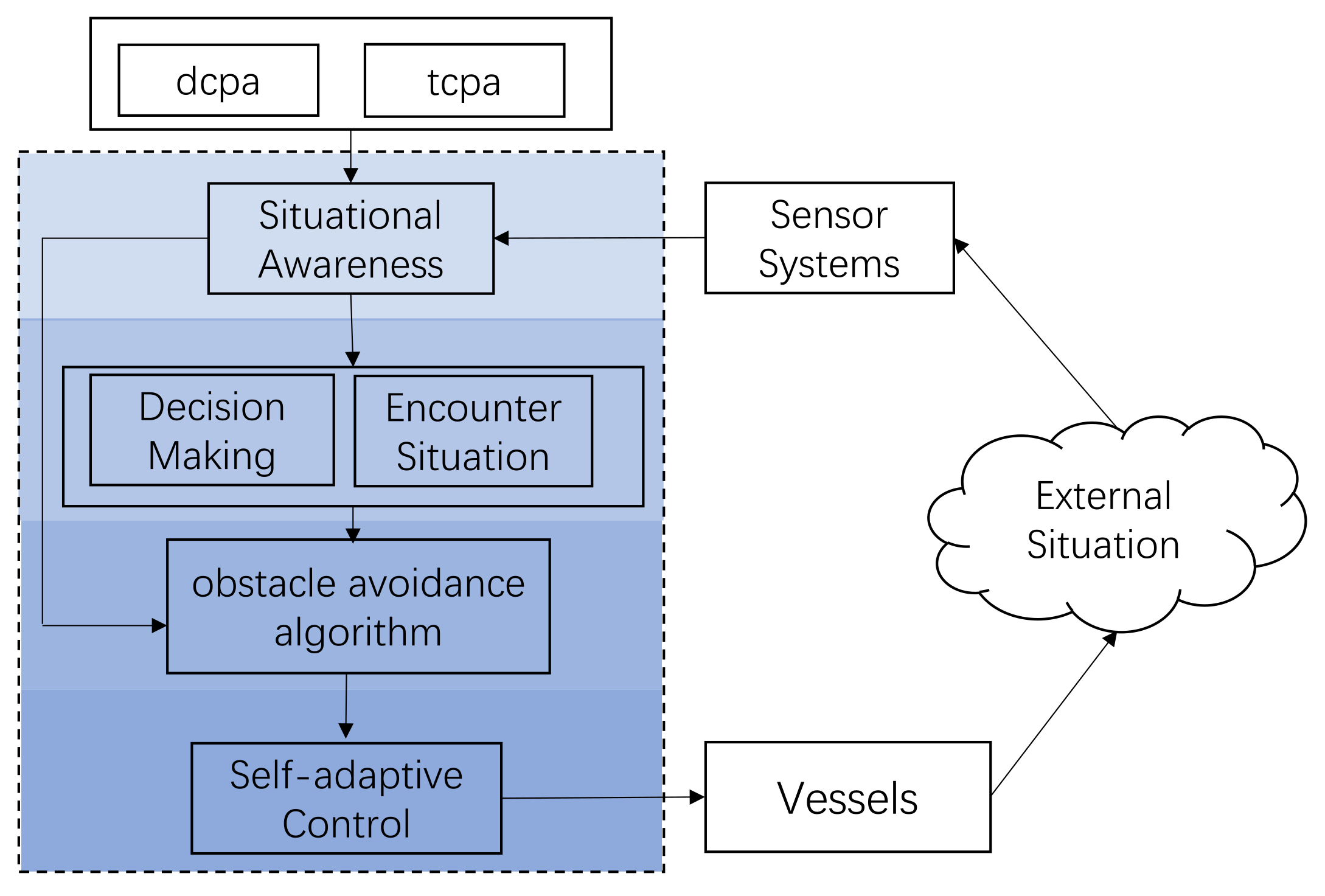
Section 2 describes the USV dynamic model, the classification of encounter situations, and the basic process framework of USV collision avoidance decision-making based on the category related to this study.
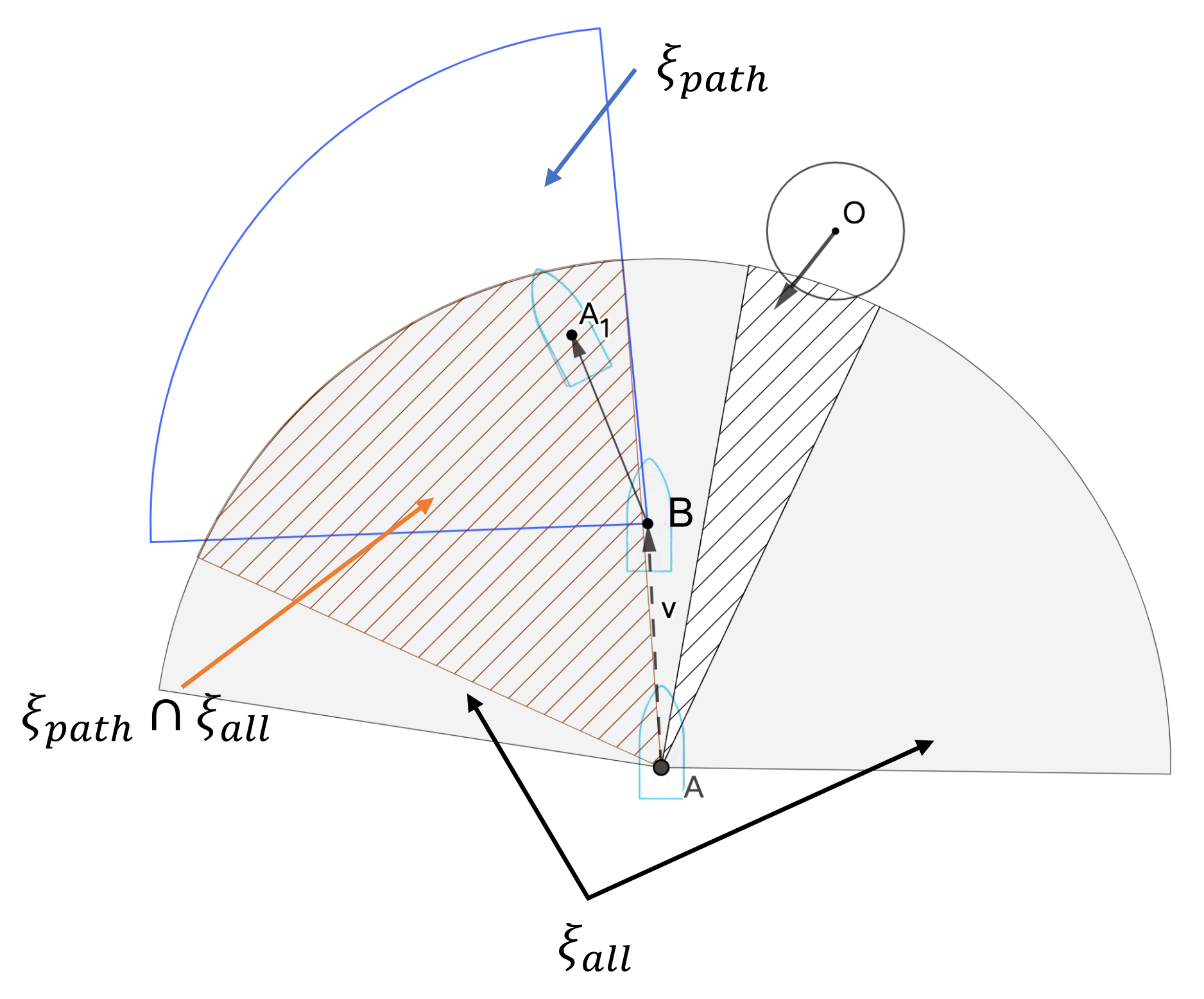
Section 3 contains a detailed description of the optimal timing point model for collision avoidance based on the improved DWA. We propose a collision avoidance algorithm based on the velocity obstacle method. In
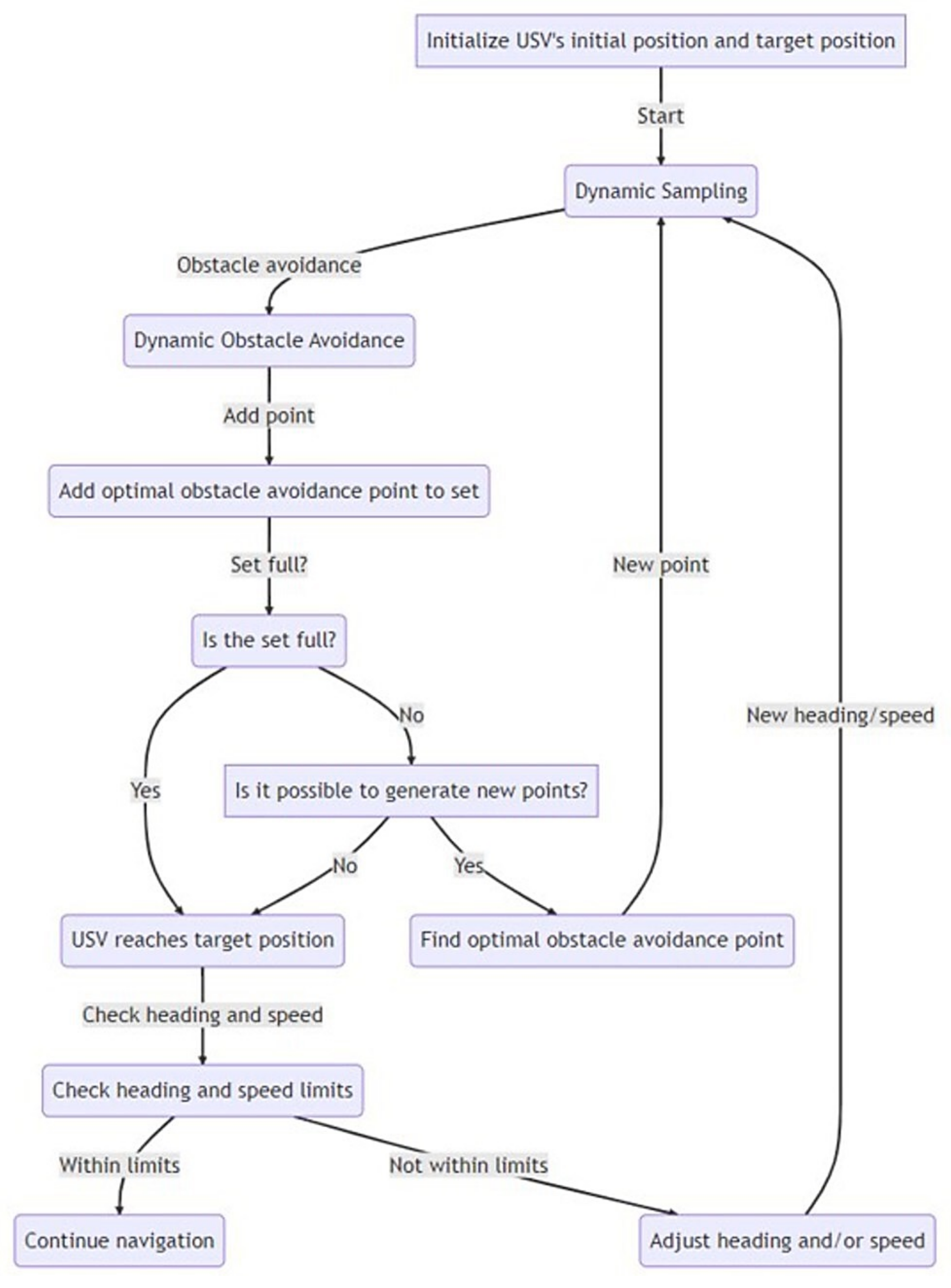
Section 4, the design of a dynamic obstacle avoidance algorithm for USVs is considered and a detailed algorithm flow and design are presented. In
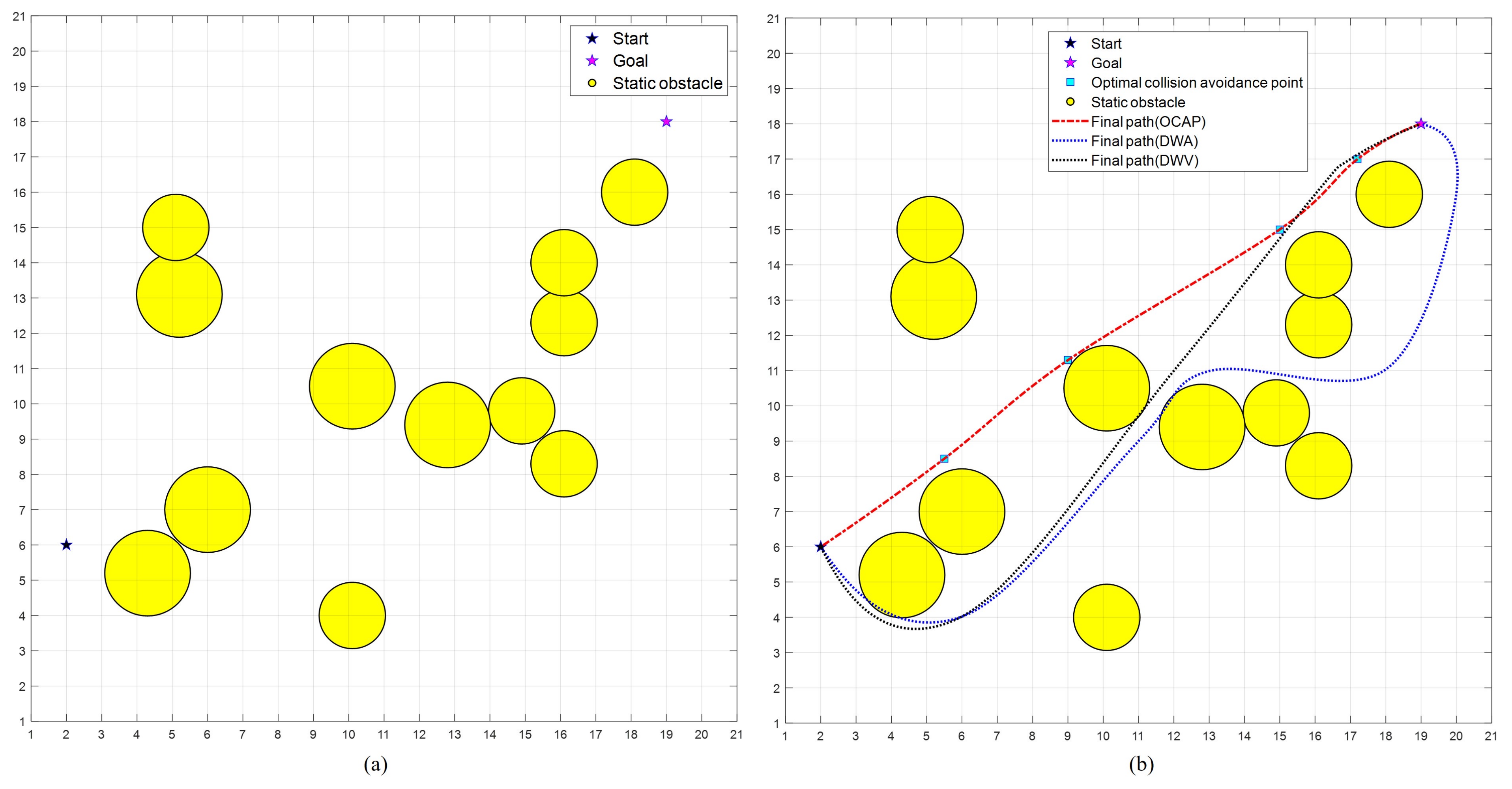
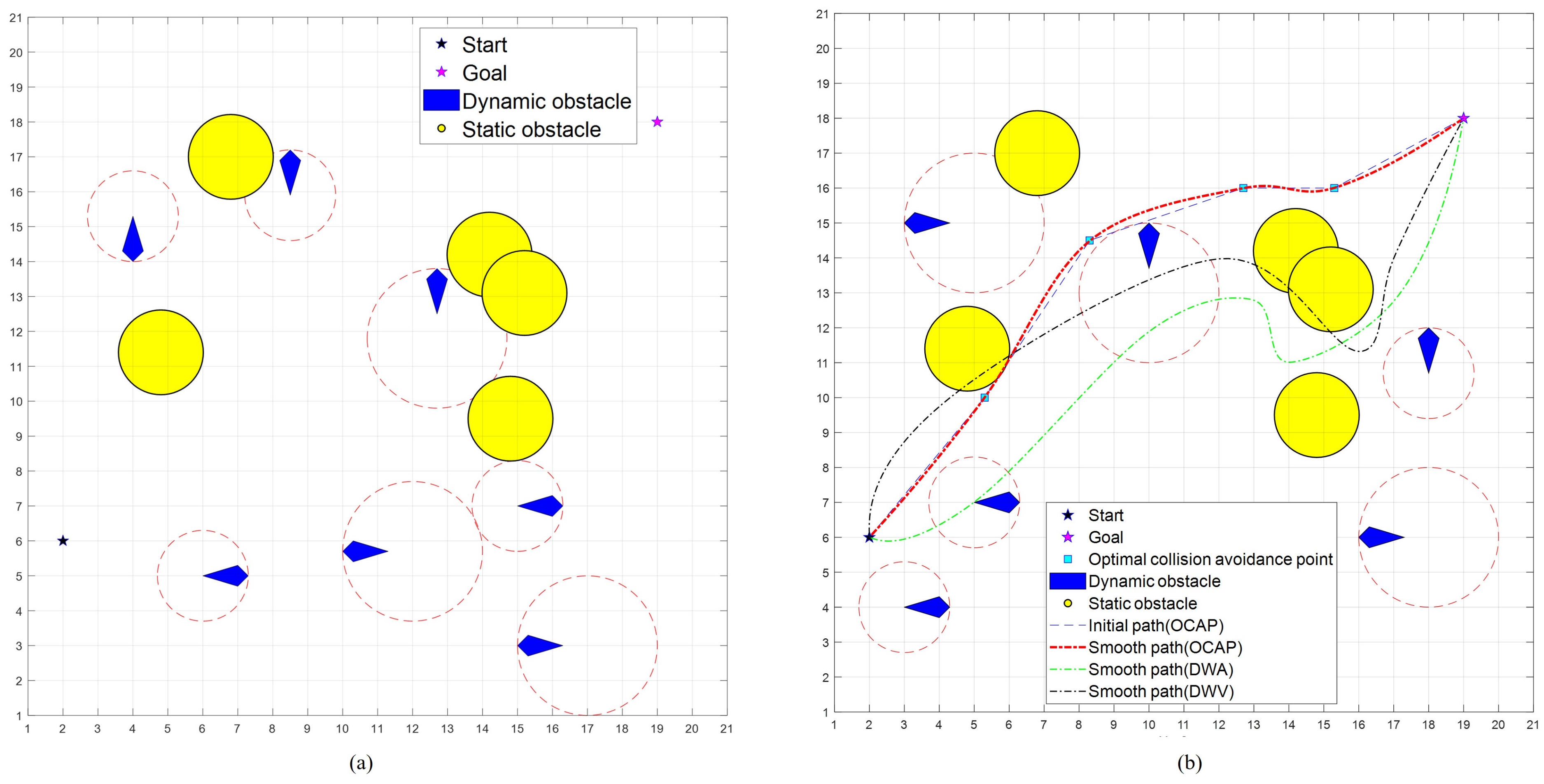
Section 5, the results of computational experiments performed for the evaluation of the proposed algorithm are presented. According to simulation experiments, we compare the effects of three different algorithms on the collision avoidance path selection of a USV and analyze the degree of excellence resulting from the influence of various collision avoidance factors in path selection. Finally, in
Section 6, the conclusions are discussed.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}