Dear Colleagues,
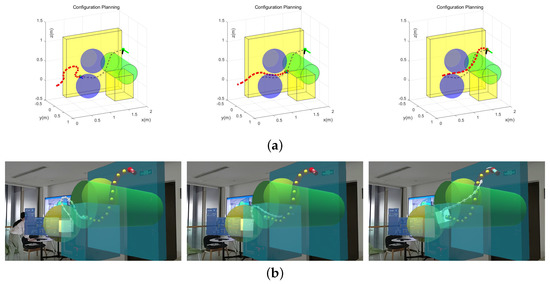
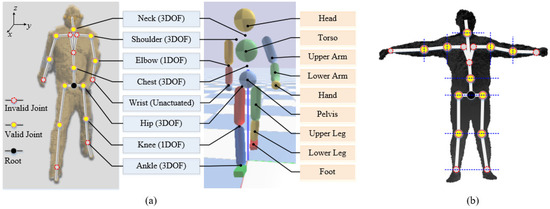
Thanks to the recent advancement of robotic solutions and computational intelligence, autonomous robots that interact with humans are nowadays becoming more available to the public, offering different benefits to support people in various organisational contexts, such as education, assistive applications, customer service, and home maintenance. These robots are envisioned to deliver meaningful benefits through efficient and effective interaction with humans to fulfil their expectations. These beneficial effects, however, may not always be realised due to maladaptive forms of interaction. To establish a successful human–robot interaction (HRI), besides the perceptual and cognitive capabilities, an autonomous robot should be able to adapt its behaviour in real time and often in partially unknown environments, make necessary adjustments to the situation at hand, and, in turn, achieve the high-level goal, e.g., assisting a person to solve a puzzle or a tricky maths problem.
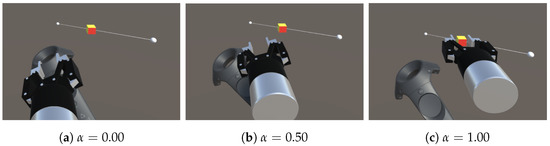
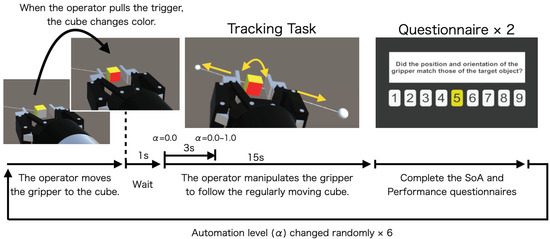
In contrast to automation that follows pre-programmed “rules” and is limited to specific actions, autonomous robots are envisioned to have a context-guided behaviour adaptation capability, which would allow them to have a degree of self-governance, enabling them to learn and respond actively to situations that were not pre-programmed by the developer. Although this capability of the robot would potentially promote HRIs, there are serious concerns regarding the impact of technology adaptation on human trust, as the actions of the robots involved in HRI will become less predictable. Thus, it is believed that a successful and trustworthy HRI must be a trade-off between the robot’s behaviour adaptation capability and the robot’s capability in measuring and manipulating other community- and individual-relevant factors such as trust, where the human is the trustor and the robot is the trustee, with the final aim of maximising the outcomes of the HRI.
This Topical Collection aims to cover different aspects of the recent advances in the human–robot interaction field, including the development of architectures and modules for sensing, cognition, and control of robotic systems involved in HRIs, user studies, analysis, assessment and validation of robotic systems, as well as work in progress in this field. Authors are encouraged to submit both original research articles and surveys. Research articles should address the originality, as well as practical aspects and implementation, of the work in the field, while surveys should provide an overview and up-to-date information.
We welcome submissions from all topics of HRI applied to industry, health, and education, including, but not limited to, the following topics:
- Development of robotic frameworks for sense, cognition, and control;
- Context-guided behaviour adaptation in HRIs;
- Mutual perception in closed-loop HRIs;
- Contextual reasoning in HRIs;
- Assistive robotics;
- Human-in-the-loop control;
- Learning by demonstration;
- Human factors in HCI/HRI;
- Human-guided reinforcement learning;
- Interpretable machine learning with human-in-the-loop;
- Trust and autonomy in HRIs in different contexts;
- Trust-aware HRI;
- Trust measurement tools in HRIs;
- Explainable robotics;
- HRIs in real-world settings.
Dr. Abolfazl Zaraki
Dr. Hamed Rahimi Nohooji
Collection Editors
Manuscript Submission Information
Manuscripts should be submitted online at www.mdpi.com by registering and logging in to this website. Once you are registered, click here to go to the submission form. Manuscripts can be submitted until the deadline. All submissions that pass pre-check are peer-reviewed. Accepted papers will be published continuously in the journal (as soon as accepted) and will be listed together on the collection website. Research articles, review articles as well as short communications are invited. For planned papers, a title and short abstract (about 100 words) can be sent to the Editorial Office for announcement on this website.
Submitted manuscripts should not have been published previously, nor be under consideration for publication elsewhere (except conference proceedings papers). All manuscripts are thoroughly refereed through a single-blind peer-review process. A guide for authors and other relevant information for submission of manuscripts is available on the Instructions for Authors page. Sensors is an international peer-reviewed open access semimonthly journal published by MDPI.
Please visit the Instructions for Authors page before submitting a manuscript.
The Article Processing Charge (APC) for publication in this open access journal is 2600 CHF (Swiss Francs).
Submitted papers should be well formatted and use good English. Authors may use MDPI's
English editing service prior to publication or during author revisions.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}