
Real-Time AI-Assisted Push-Broom Hyperspectral System for Precision Agriculture

 ,
,  ,
,  , ,
, ,  , , ,
, , ,  ,
,  and
and 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Push-Broom Spectrometer Design
2.1.1. Optical Assembly
- (1)
- A wide-angle (81°) objective, TTartisan APS–C 17 mm F1.4 [27] (TTArtisan Tech Co., Limited, Shenzhen, China), collecting lens L1, focuses the incoming light on a 20 mm long and 200 μm wide slit, 3D-printed in black PLA. Considering the objective focal length ( mm, considering the crop factor), at a distance of 1.2 m, the slit selects on a soil a line which is about 1 cm wide and 1 m long. It should be noted that in such conditions, the depth of the field is about 25 cm, sufficient to accommodate the different heights of plants. Next, the slit and the collimating lens L2, mm [28] (Thorlabs Inc., Newton, NJ, USA) focus on the slit and collimate the light toward the prism.
- (2)
- An F2 equilateral prism [29] (Thorlabs Inc., Newton, NJ, USA) was chosen for dispersing the collected light. For this application, the prism presents an advantageous alternative to grating by offering simplicity and robustness, important features for a setup that can be mounted on a ground vehicle moving on rough terrain, also avoiding the complexities associated with higher diffraction orders. The light is dispersed by the prism in a direction perpendicular to the slit length so that, after the prism, the light rays’ vertical angle with the optical axis depends on the position with regard to the soil and the horizontal angle on the wavelength (mainly).
- (3)
- The re-imaging lens L3, mm [30] (Edmund Optics Inc., Barrington, NJ, USA), focuses the parallel light rays on the detector so that the horizontal coordinate of the sensor depends on the wavelength while the vertical component depends on its position with regard to the soil. The two lenses, L2 and L3, are in a telescopic configuration with a magnification factor equal to the ratio of the focal distances (). The sensor is the monochrome camera Allied Vision Alvium 1800 U-040m [31] (Allied Vision, Stadtroda, Germany). It satisfies the requirements of a continuous acquisition and real-time analysis (max. frame rate at full resolution, 495 fps), together with the needed spectral and spatial resolution (728 × 544 px). In fact, at 50 fps, considering a UGV speed of 5 km/h (i.e., ∼14 cm/s), each snapshot differs by less than 3 mm, enough to measure the changes in different leaves. Moreover, the number of pixels allows for a nominal spatial resolution of 0.16 cm/px, with an average nominal spectral resolution in the sensitivity region of the detector (300–1000 nm) lower than 2 nm/px.
2.1.2. 3D Printing and Machining
2.2. Real-Time Acquisition and Classification System
2.2.1. Acquisition System
2.2.2. Data-Set
2.2.3. Training and Classification
3. Results
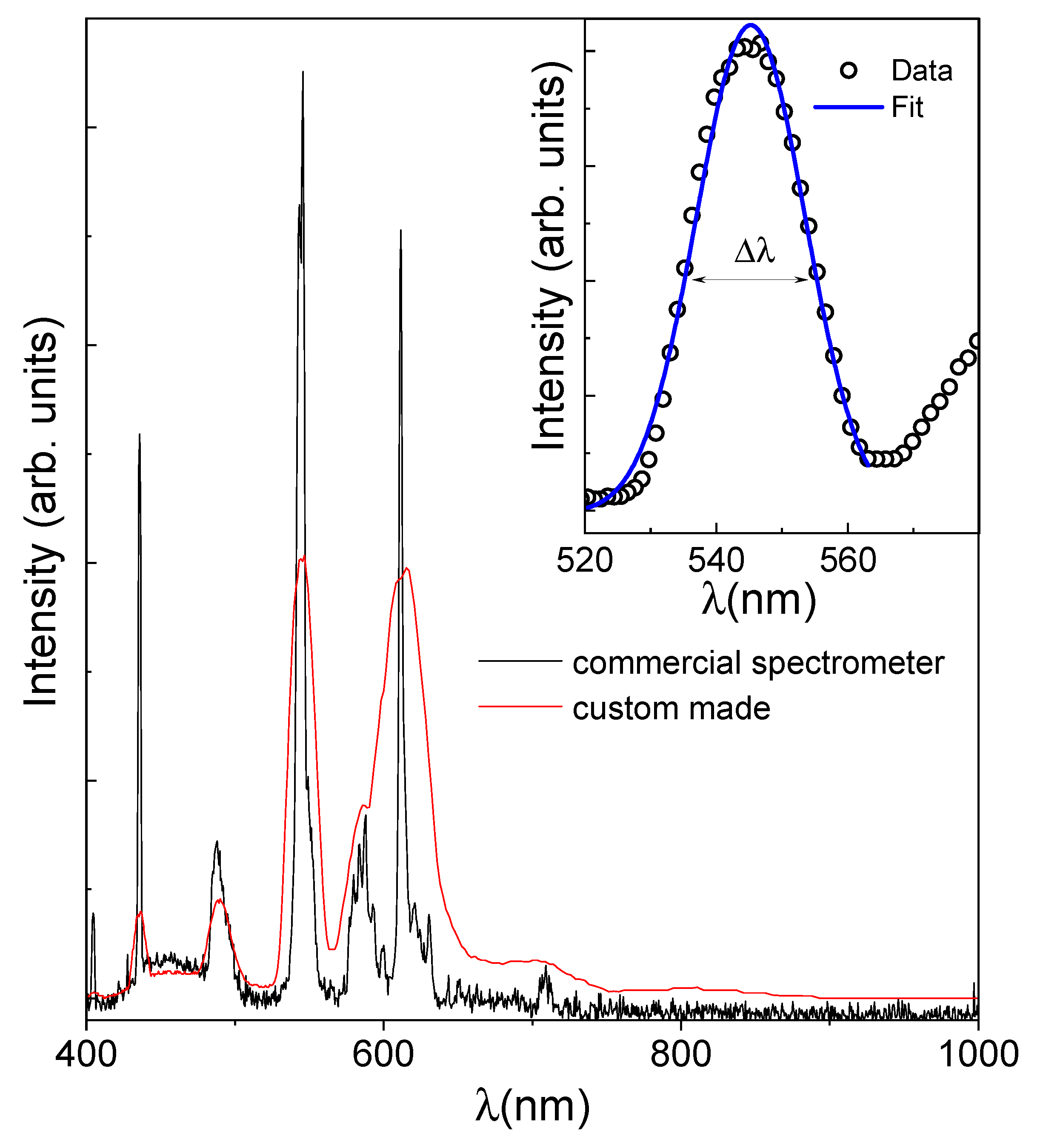
3.1. Calibration and Resolution Analysis
3.2. Plant Classification Training, Tests, and Validation
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sousa, J.J.; Toscano, P.; Matese, A.; Di Gennaro, S.F.; Berton, A.; Gatti, M.; Poni, S.; Pádua, L.; Hruška, J.; Morais, R.; et al. UAV-Based Hyperspectral Monitoring Using Push-Broom and Snapshot Sensors: A Multisite Assessment for Precision Viticulture Applications. Sensors 2022, 22, 6574. [Google Scholar] [CrossRef] [PubMed]
- Sigernes, F.; Syrjäsuo, M.; Storvold, R.; Fortuna, J.; Grøtte, M.E.; Johansen, T.A. Do it yourself hyperspectral imager for handheld to airborne operations. Opt. Express 2018, 26, 6021–6035. [Google Scholar] [CrossRef] [PubMed]
- Jin-Ling, Z.; Dong-Yan, Z.; Ju-Hua, L.; Yang, H.; Lin-Sheng, H.; Wen-Jiang, H. A comparative study on monitoring leaf-scale wheat aphids using pushbroom imaging and non-imaging ASD field spectrometers. Int. J. Agric. Biol. 2012, 14, 136–140. [Google Scholar]
- Fu-Ping, G.; Run-Sheng, W.; Ai-Nai, M.; Su-Ming, Y. Investigation on physiological status of regional vegetation using pushbroom hyperspectral imager data. J. Integr. Plant Biol. 2002, 44, 983. [Google Scholar]
- Fan, S.; Li, C.; Huang, W. Data fusion of two hyperspectral imaging systems for blueberry bruising detection. In Proceedings of the 2017 ASABE Annual International Meeting. American Society of Agricultural and Biological Engineers, Spokane, WA, USA, 16–19 July 2017; p. 1. [Google Scholar]
- Moroni, M. Vegetation monitoring via a novel push-broom-sensor-based hyperspectral device. J. Phys. Conf. Ser. 2019, 1249, 012007. [Google Scholar] [CrossRef]
- Akhtman, Y.; Golubeva, E.; Tutubalina, O.; Zimin, M. Application of hyperspectural images and ground data for precision farming. Geogr. Environ. Sustain. 2017, 10, 117–128. [Google Scholar] [CrossRef]
- Dale, L.M.; Thewis, A.; Boudry, C.; Rotar, I.; Dardenne, P.; Baeten, V.; Pierna, J.A.F. Hyperspectral imaging applications in agriculture and agro-food product quality and safety control: A review. Appl. Spectrosc. Rev. 2013, 48, 142–159. [Google Scholar] [CrossRef]
- Dharmaraj, V.; Vijayanand, C. Artificial intelligence (AI) in agriculture. Int. J. Curr. Microbiol. Appl. Sci. 2018, 7, 2122–2128. [Google Scholar] [CrossRef]
- Falcioni, R.; Gonçalves, J.V.F.; Oliveira, K.M.d.; Oliveira, C.A.d.; Demattê, J.A.; Antunes, W.C.; Nanni, M.R. Enhancing Pigment Phenotyping and Classification in Lettuce through the Integration of Reflectance Spectroscopy and AI Algorithms. Plants 2023, 12, 1333. [Google Scholar] [CrossRef]
- Subudhi, S.; Dabhade, R.G.; Shastri, R.; Gundu, V.; Vignesh, G.; Chaturvedi, A. Empowering sustainable farming practices with AI-enabled interactive visualization of hyperspectral imaging data. Meas. Sensors 2023, 30, 100935. [Google Scholar] [CrossRef]
- Reis Pereira, M.; Santos, F.N.d.; Tavares, F.; Cunha, M. Enhancing host-pathogen phenotyping dynamics: Early detection of tomato bacterial diseases using hyperspectral point measurement and predictive modeling. Front. Plant Sci. 2023, 14, 1242201. [Google Scholar] [CrossRef] [PubMed]
- Gold, K.M.; Townsend, P.A.; Chlus, A.; Herrmann, I.; Couture, J.J.; Larson, E.R.; Gevens, A.J. Hyperspectral measurements enable pre-symptomatic detection and differentiation of contrasting physiological effects of late blight and early blight in potato. Remote Sens. 2020, 12, 286. [Google Scholar] [CrossRef]
- Morlin Carneiro, F.; Angeli Furlani, C.E.; Zerbato, C.; Candida de Menezes, P.; da Silva Gírio, L.A.; Freire de Oliveira, M. Comparison between vegetation indices for detecting spatial and temporal variabilities in soybean crop using canopy sensors. Precis. Agric. 2019, 21, 979–1007. [Google Scholar] [CrossRef]
- Deng, L.; Mao, Z.; Li, X.; Hu, Z.; Duan, F.; Yan, Y. UAV-based multispectral remote sensing for precision agriculture: A comparison between different cameras. ISPRS J. Photogramm. Remote Sens. 2018, 146, 124–136. [Google Scholar] [CrossRef]
- Su, J.; Zhu, X.; Li, S.; Chen, W.H. AI meets UAVs: A survey on AI empowered UAV perception systems for precision agriculture. Neurocomputing 2023, 518, 242–270. [Google Scholar] [CrossRef]
- European Parliament; Directorate-General for Parliamentary Research Services; De Baerdemaeker, J. Artificial Intelligence in the Agri-Food Sector: Applications, Risks and Impacts; Publications Office of the European Union: Luxembourg, 2023. [CrossRef]
- Kutyauripo, I.; Rushambwa, M.; Chiwazi, L. Artificial intelligence applications in the agrifood sectors. J. Agric. Food Res. 2023, 11, 100502. [Google Scholar] [CrossRef]
- Ortenzi, L.; Violino, S.; Costa, C.; Figorilli, S.; Vasta, S.; Tocci, F.; Moscovini, L.; Basiricò, L.; Evangelista, C.; Pallottino, F.; et al. An innovative technique for faecal score classification based on RGB images and artificial intelligence algorithms. J. Agric. Sci. 2023, 161, 291–296. [Google Scholar] [CrossRef]
- Sperandio, G.; Ortenzi, L.; Spinelli, R.; Magagnotti, N.; Figorilli, S.; Acampora, A.; Costa, C. A multi-step modelling approach to evaluate the fuel consumption, emissions, and costs in forest operations. Eur. J. For. Res. 2023. [Google Scholar] [CrossRef]
- Pane, C.; Manganiello, G.; Nicastro, N.; Ortenzi, L.; Pallottino, F.; Cardi, T.; Costa, C. Machine learning applied to canopy hyperspectral image data to support biological control of soil-borne fungal diseases in baby leaf vegetables. Biol. Control 2021, 164, 104784. [Google Scholar] [CrossRef]
- Moscovini, L.; Ortenzi, L.; Pallottino, F.; Figorilli, S.; Violino, S.; Pane, C.; Capparella, V.; Vasta, S.; Costa, C. An open-source machine-learning application for predicting pixel-to-pixel NDVI regression from RGB calibrated images. Comput. Electron. Agric. 2024, 216, 108536. [Google Scholar] [CrossRef]
- Navarro, A.; Nicastro, N.; Costa, C.; Pentangelo, A.; Cardarelli, M.; Ortenzi, L.; Pallottino, F.; Cardi, T.; Pane, C. Sorting biotic and abiotic stresses on wild rocket by leaf-image hyperspectral data mining with an artificial intelligence model. Plant Methods 2022, 18, 45. [Google Scholar] [CrossRef] [PubMed]
- Ortenzi, L.; Figorilli, S.; Violino, S.; Pallottino, F.; Costa, C. Artificial Intelligence approaches for fast and portable traceability assessment of EVOO. In Proceedings of the 2023 IEEE International Conference on Omni-layer Intelligent Systems (COINS), Berlin, Germany, 23–25 July 2023. [Google Scholar] [CrossRef]
- Tsakanikas, P.; Karnavas, A.; Panagou, E.Z.; Nychas, G.J. A machine learning workflow for raw food spectroscopic classification in a future industry. Sci. Rep. 2020, 10, 11212. [Google Scholar] [CrossRef] [PubMed]
- Heydarov, S.; Aydin, M.; Faydaci, C.; Tuna, S.; Ozturk, S. Low-cost VIS/NIR range hand-held and portable photospectrometer and evaluation of machine learning algorithms for classification performance. Eng. Sci. Technol. Int. J. 2023, 37, 101302. [Google Scholar] [CrossRef]
- TTArtisan APS-C 17mm F1.4-APS-C Lenses. Available online: https://en.ttartisan.com/?list_10%2F122.html (accessed on 29 November 2023).
- Thorlabs—AC127-075-A f = 75 mm, Ø1/2—thorlabs.com. Available online: https://www.thorlabs.com/thorproduct.cfm?partnumber=AC127-075-A (accessed on 29 November 2023).
- Thorlabs, Inc. PS852-F2 Equilateral Dispersive Prism, 25 mm. Available online: https://www.thorlabs.com/thorproduct.cfm?partnumber=PS852 (accessed on 29 November 2023).
- 25.0 mm FL, No IR-Cut Filter, f/2.5, Micro Video Lens—Edmundoptics.com. Available online: https://www.edmundoptics.com/p/250mm-fl-no-ir-cut-filter-f25-micro-video-lens/13716/ (accessed on 29 November 2023).
- Alvium 1800 U-040. Available online: https://www.alliedvision.com/fileadmin/pdf/en/Alvium_1800_U-040m_Closed-Housing_C-Mount_Standard_DataSheet_en.pdf (accessed on 29 November 2023).
- Suchowski, H. Cloud-based simulation tools for streamlined optical design: 3DOptix is a free, easy-to-use, cloud-based optical design and simulation software which includes a suite of discovery tools and drawings. PhotonicsViews 2021, 18, 46–48. [Google Scholar] [CrossRef]
- Raspberry Pi (Trading) Ltd. Raspberry Pi 4 Model B; Raspberry Pi (Trading) Ltd.: Cambridge, UK, 2019; Rel. 1; Available online: https://datasheets.raspberrypi.com/rpi4/raspberry-pi-4-datasheet.pdf (accessed on 3 July 2023).
- Allied Vision. Vimba for Linux ARMv8 64-bit, 6.0. 2022. Available online: https://www.alliedvision.com/en/products/vimba-sdk (accessed on 3 May 2023).
- Bradski, G. The openCV library. Dr. Dobb’s J. Softw. Tools 2000, 25, 120–123. [Google Scholar]
- Garg, N. Apache Kafka; Packt Publishing: Birmingham, UK, 2013. [Google Scholar]
- Kramer, O.; Kramer, O. Scikit-learn. In Machine Learning for Evolution Strategies; Springer: Cham, Switzerland, 2016; pp. 45–53. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Grant, L. Diffuse and specular characteristics of leaf reflectance. Remote Sens. Environ. 1987, 22, 309–322. [Google Scholar] [CrossRef]
- Liu, C.; Sun, P.S.; Liu, S.R. A review of plant spectral reflectance response to water physiological changes. Chin. J. Plant Ecol. 2016, 40, 80. [Google Scholar]
- Mishra, P.; Asaari, M.S.M.; Herrero-Langreo, A.; Lohumi, S.; Diezma, B.; Scheunders, P. Close range hyperspectral imaging of plants: A review. Biosyst. Eng. 2017, 164, 49–67. [Google Scholar] [CrossRef]
- Merzlyak, M.; Gitelson, A.; Chivkunova, O.; Solovchenko, A.; Pogosyan, S. Application of reflectance spectroscopy for analysis of higher plant pigments. Russ. J. Plant Physiol. 2003, 50, 704–710. [Google Scholar] [CrossRef]
- Manjunath, K.; Ray, S.; Vyas, D. Identification of indices for accurate estimation of anthocyanin and carotenoids in different species of flowers using hyperspectral data. Remote Sens. Lett. 2016, 7, 1004–1013. [Google Scholar] [CrossRef]
- Zou, X.; Mõttus, M. Retrieving crop leaf tilt angle from imaging spectroscopy data. Agric. For. Meteorol. 2015, 205, 73–82. [Google Scholar] [CrossRef]
- Song, X.; Feng, W.; He, L.; Xu, D.; Zhang, H.Y.; Li, X.; Wang, Z.J.; Coburn, C.A.; Wang, C.Y.; Guo, T.C. Examining view angle effects on leaf N estimation in wheat using field reflectance spectroscopy. ISPRS J. Photogramm. Remote Sens. 2016, 122, 57–67. [Google Scholar] [CrossRef]
- Hu, P.; Huang, H.; Chen, Y.; Qi, J.; Li, W.; Jiang, C.; Wu, H.; Tian, W.; Hyyppä, J. Analyzing the angle effect of leaf reflectance measured by indoor hyperspectral light detection and ranging (LiDAR). Remote Sens. 2020, 12, 919. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016; Available online: http://www.deeplearningbook.org (accessed on 7 September 2023).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Samples | Lettuce | Arugula | Total |
|---|---|---|---|
| Train | 157,407 | 50,396 | 207,803 |
| Test | 67,460 | 21,599 | 89,059 |
| Total | 224,867 | 71,995 | 296,862 |
| Precision | Recall | F-Measure | |
|---|---|---|---|
| Lettuce | 1.00 | 1.00 | 1.00 |
| Arugula | 0.99 | 0.99 | 0.99 |
| Accuracy | 0.996 |
| Relevant Working Parameters | |
|---|---|
| Wavelength operation range | 300–1000 nm |
| Spectral resolution | <20 nm at 540 nm |
| Field of view at 1.2 m | Soil line 1 cm wide and 1 m long |
| Working distance | From 0.9 to 1.10 m |
| Spatial resolution | ∼0.5 cm along the scanned dimension line |
| ∼1 cm along the motion direction | |
| Acquisition time | Max. frame rate at full resolution, 495 fps |
| Classification speed | ∼35,000 spectra @ 50 fps |
| Data transfer | Wireless connectivity |
| Weight | ∼1.5 kg |
| Dimensions | 30 cm × 20 cm × 10 cm (L × W × H) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Neri, I.; Caponi, S.; Bonacci, F.; Clementi, G.; Cottone, F.; Gammaitoni, L.; Figorilli, S.; Ortenzi, L.; Aisa, S.; Pallottino, F.; et al. Real-Time AI-Assisted Push-Broom Hyperspectral System for Precision Agriculture. Sensors 2024, 24, 344. https://doi.org/10.3390/s24020344
Neri I, Caponi S, Bonacci F, Clementi G, Cottone F, Gammaitoni L, Figorilli S, Ortenzi L, Aisa S, Pallottino F, et al. Real-Time AI-Assisted Push-Broom Hyperspectral System for Precision Agriculture. Sensors. 2024; 24(2):344. https://doi.org/10.3390/s24020344
Chicago/Turabian StyleNeri, Igor, Silvia Caponi, Francesco Bonacci, Giacomo Clementi, Francesco Cottone, Luca Gammaitoni, Simone Figorilli, Luciano Ortenzi, Simone Aisa, Federico Pallottino, and et al. 2024. "Real-Time AI-Assisted Push-Broom Hyperspectral System for Precision Agriculture" Sensors 24, no. 2: 344. https://doi.org/10.3390/s24020344
APA StyleNeri, I., Caponi, S., Bonacci, F., Clementi, G., Cottone, F., Gammaitoni, L., Figorilli, S., Ortenzi, L., Aisa, S., Pallottino, F., & Mattarelli, M. (2024). Real-Time AI-Assisted Push-Broom Hyperspectral System for Precision Agriculture. Sensors, 24(2), 344. https://doi.org/10.3390/s24020344