
Enhancing Security in Visible Light Communication: A Tabu-Search-Based Method for Transmitter Selection


Abstract
:1. Introduction
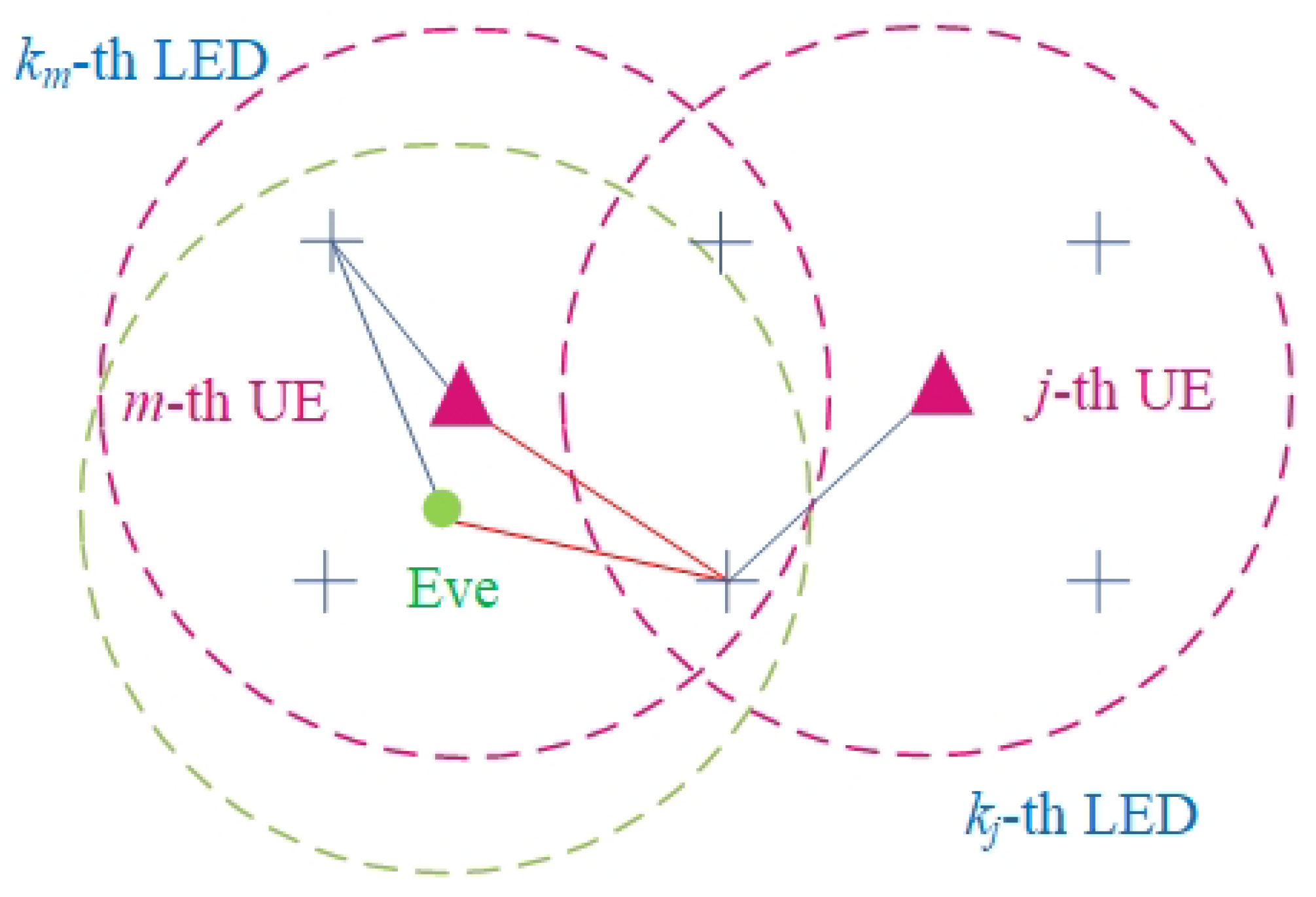
2. System Model
3. Proposed Algorithm and Strategies
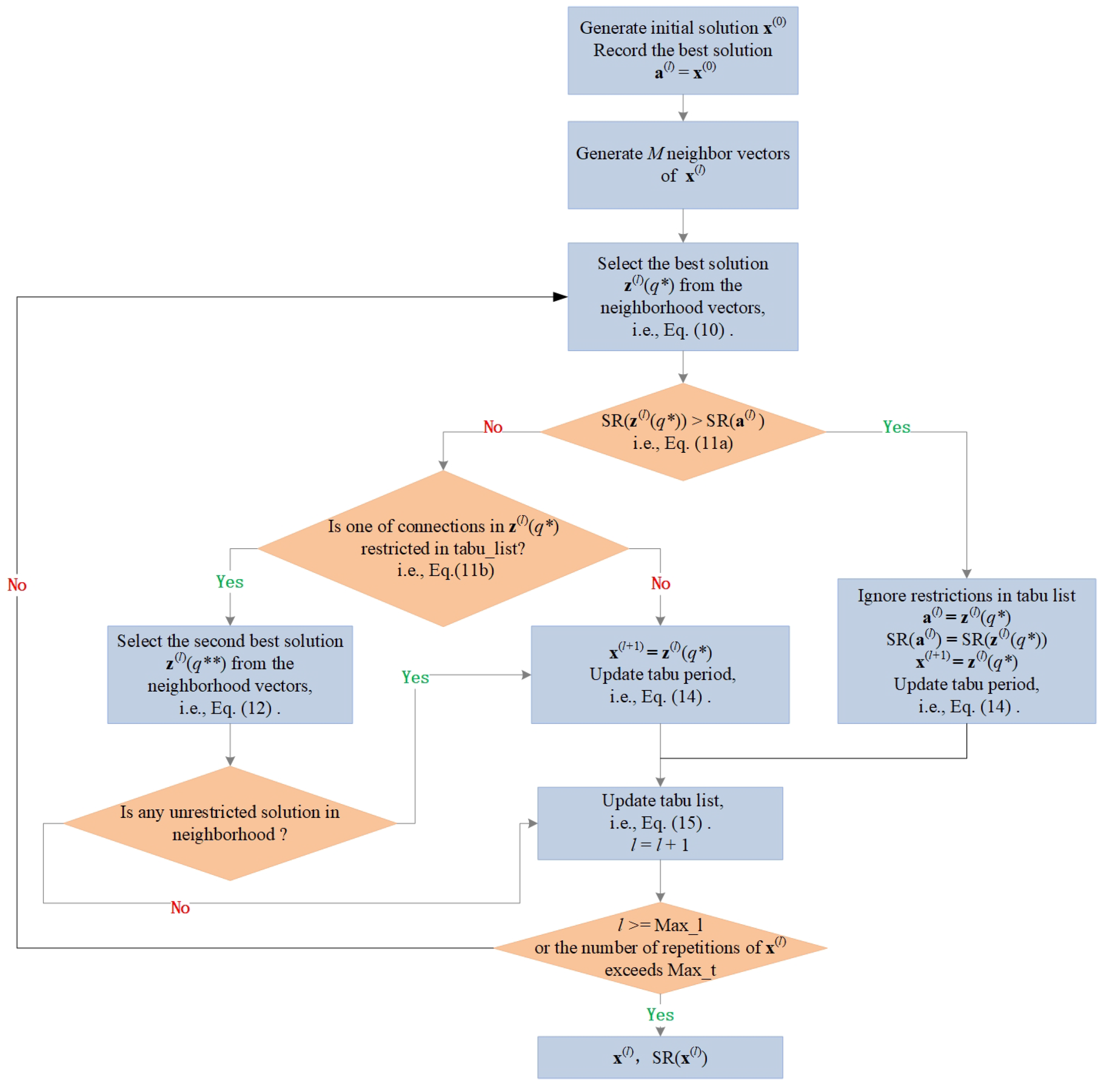
3.1. Tabu Search-Based LED Selection Algorithm
3.2. Simple LED Selection Strategies
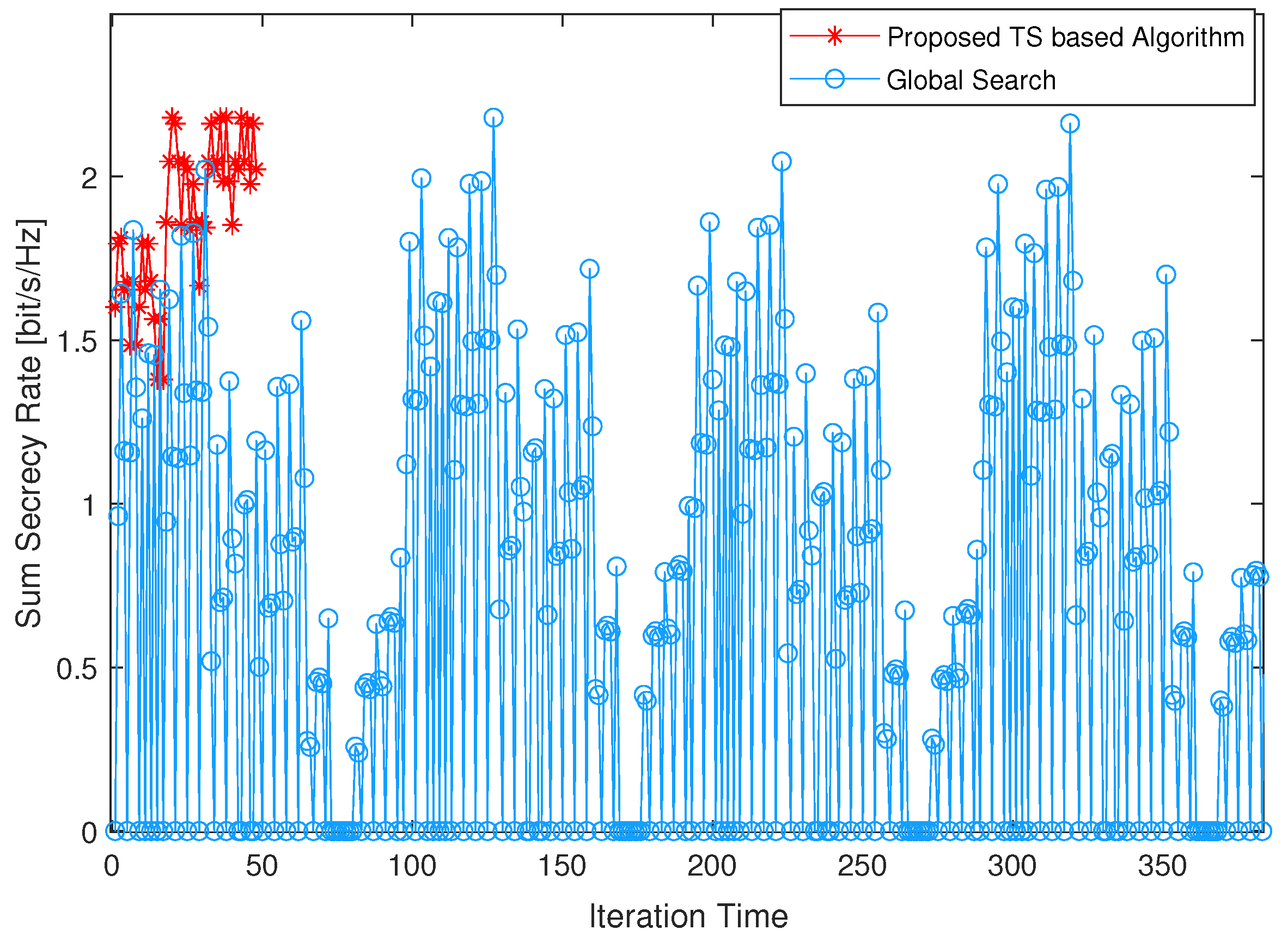
3.3. Global Search
3.4. Convergence Analysis
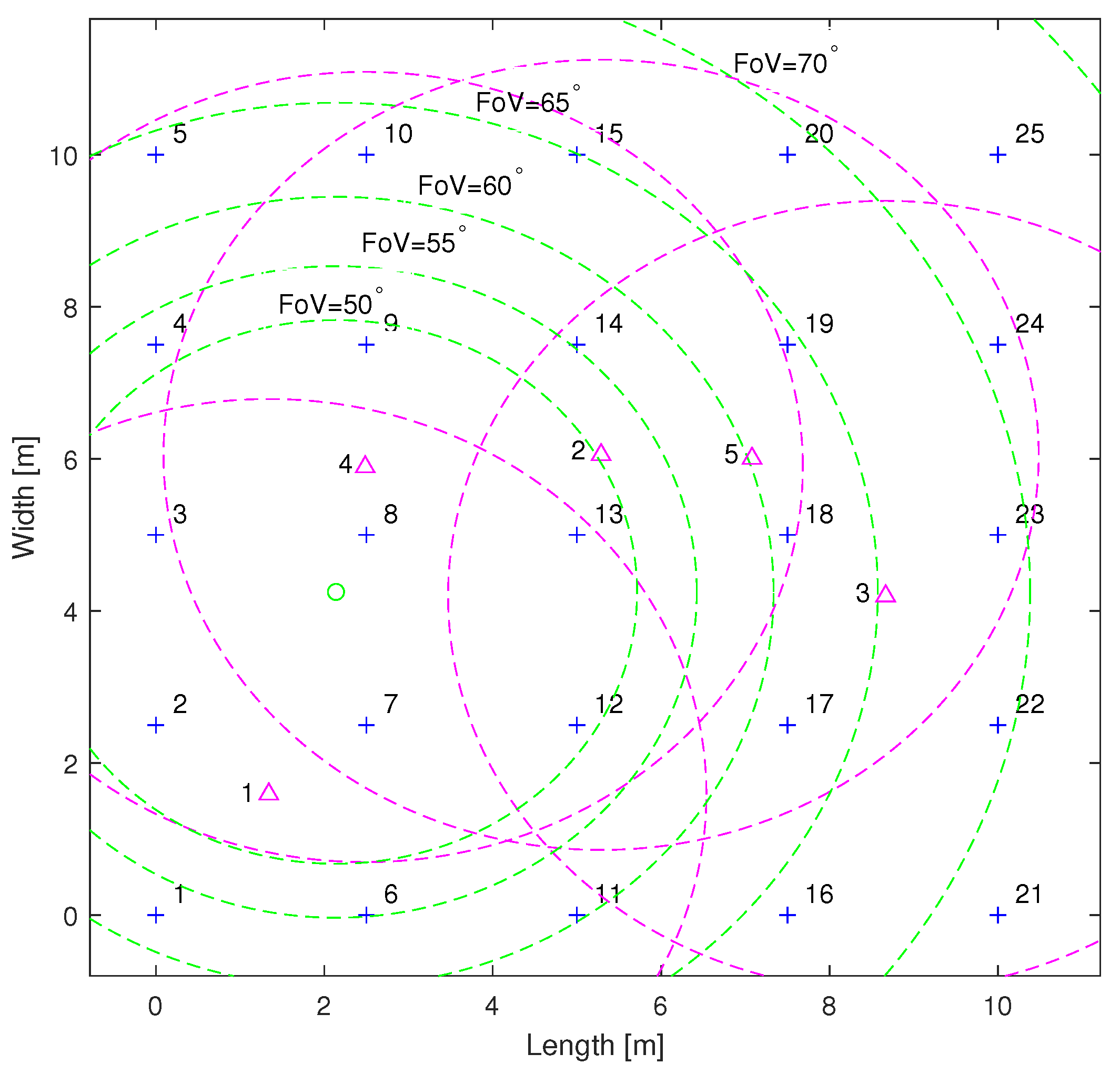
4. Numerical Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Aboagye, S.; Ndjiongue, A.R.; Ngatched, T.M.N.; Dobre, O.A.; Poor, H.V. RIS-Assisted Visible Light Communication Systems: A Tutorial. IEEE Commun. Surveys Tuts. 2023, 25, 251–288. [Google Scholar] [CrossRef]
- Shi, G.; Li, Y.; Cheng, W.; Dong, L.; Yang, J.; Zhang, W. Accuracy analysis of indoor visible light communication localization system based on received signal strength in non-line-of-sight environments by using least squares method. Opt. Eng. 2019, 58, 1–11. [Google Scholar] [CrossRef]
- Naser, S.; Sofotasios, P.C.; Bariah, L.; Jaafar, W.; Muhaidat, S.; Al-Qutayri, M.; Dobre, O.A. Rate-Splitting Multiple Access: Unifying NOMA and SDMA in MISO VLC Channels. IEEE Open J. Veh. Technol. 2020, 1, 393–413. [Google Scholar] [CrossRef]
- Khisti, A.; Wornell, G.W. Secure Transmission With Multiple Antennas I: The MISOME Wiretap Channel. IEEE Trans. Inf. Theory 2010, 56, 3088–3104. [Google Scholar] [CrossRef]
- Mostafa, A.; Lampe, L. Physical-Layer Security for MISO Visible Light Communication Channels. IEEE J. Sel. Areas Commun. 2015, 33, 1806–1818. [Google Scholar] [CrossRef]
- Shi, G.; Aboagye, S.; Ngatched, T.M.N.; Dobre, O.A.; Li, Y.; Cheng, W. Secure Transmission in NOMA-Aided Multiuser Visible Light Communication Broadcasting Network With Cooperative Precoding Design. IEEE Trans. Inform. Foren. Sec. 2022, 17, 3123–3138. [Google Scholar] [CrossRef]
- Morant, M.; Trinidad, A.; Tangdiongga, E.; Koonen, T.; Llorente, R. Experimental Demonstration of mm-Wave 5G NR Photonic Beamforming Based on ORRs and Multicore Fiber. IEEE Trans. Microw. Theory Tech. 2019, 67, 2928–2935. [Google Scholar] [CrossRef]
- Cho, S.; Chen, G.; Coon, J.P. Zero-Forcing Beamforming for Active and Passive Eavesdropper Mitigation in Visible Light Communication Systems. IEEE Trans. Inf. Forensics Secur. 2021, 16, 1495–1505. [Google Scholar] [CrossRef]
- Zhang, F.; Wang, F.; Zhang, J.; Zuo, T. SVM aided LEDs selection for generalized spatial modulation of indoor VLC systems. Opt. Commun. 2021, 497, 127161. [Google Scholar] [CrossRef]
- Yang, Y.; Yang, Y.; Chen, M.; Feng, C.; Xia, H.; Cui, S.; Poor, H.V. Joint LED Selection and Precoding Optimization for Multiple-User Multiple-Cell VLC Systems. IEEE Internet Things J. 2022, 9, 6003–6017. [Google Scholar] [CrossRef]
- Chen, Y.; Gao, S.; Tu, G.; Chen, D. Group-Based LED Selection for Generalized Spatial Modulation in Visible Light Communication. IEEE Commun. Lett. 2021, 25, 3022–3026. [Google Scholar] [CrossRef]
- Cho, S.; Chen, G.; Coon, J.P. Securing Visible Light Communication Systems by Beamforming in the Presence of Randomly Distributed Eavesdroppers. IEEE Trans. Wirel. Commun. 2018, 17, 2918–2931. [Google Scholar] [CrossRef]
- Obeed, M.; Salhab, A.M.; Alouini, M.; Zummo, S.A. On Optimizing VLC Networks for Downlink Multi-User Transmission: A Survey. IEEE Commun. Surv. Tuts. 2019, 21, 2947–2976. [Google Scholar]
- Yapıcı, Y.; Güvenç, I. NOMA for VLC Downlink Transmission With Random Receiver Orientation. IEEE Trans. Commun. 2019, 67, 5558–5573. [Google Scholar] [CrossRef]
- Browne, C.B.; Powley, E.; Whitehouse, D.; Lucas, S.M.; Cowling, P.I.; Rohlfshagen, P.; Tavener, S.; Perez, D.; Samothrakis, S.; Colton, S. A Survey of Monte Carlo Tree Search Methods. IEEE Trans. Comput. Intell. AI Games 2012, 4, 1–43. [Google Scholar] [CrossRef]
- Zheng, G.; Gong, C.; Xu, Z. Constrained Partial Group Decoding With Max–Min Fairness for Multi-Color Multi-User Visible Light Communication. IEEE Trans. Commun. 2019, 67, 8573–8584. [Google Scholar] [CrossRef]
- Lai, X.; Fu, Z.H. A Tabu Search Approach With Dynamical Neighborhood Size for Solving the Maximum Min-Sum Dispersion Problem. IEEE Access 2019, 7, 181357–181368. [Google Scholar] [CrossRef]
- Glover, F. Tabu Search—Part I. ORSA J. Comput. 1989, 1, 190–206. [Google Scholar] [CrossRef]
- Lin, W.M.; Cheng, F.S.; Tsay, M.T. An improved tabu search for economic dispatch with multiple minima. IEEE Trans. Power Syst. 2002, 17, 108–112. [Google Scholar] [CrossRef]
- Srinidhi, N.; Datta, T.; Chockalingam, A.; Rajan, B.S. Layered Tabu Search Algorithm for Large-MIMO Detection and a Lower Bound on ML Performance. IEEE Trans. Commun. 2011, 59, 2955–2963. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Paper | Method | Main Contribution |
|---|---|---|
| Fangxin et al. [9] | Support vector machine | Improved bit error rate |
| Yang et al. [10] | Penalty method | Improved throughput |
| Yitian et al. [11] | Euclidean distance-based grouping strategy | Improved bit error rate |
| Cho et al. [12] | Euclidean distance-based strategy | Reduced secrecy outage probability |
| This paper | Tabu search | Improved secrecy rate |
| Parameter | Value |
|---|---|
| Room size () | |
| Average electrical ambient noise () | −98 dBm |
| Lambertian emission order | 1 |
| Half-intensity radiation angle | |
| PD surface area | 1 |
| Optical filter gain | 1 |
| Maximum power of an LED | 23 dBm |
| PD FoV | |
| Refractive index (q) | 1.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, G.; Cheng, W.; Gao, X.; Wei, F.; Zhang, H.; Wang, Q. Enhancing Security in Visible Light Communication: A Tabu-Search-Based Method for Transmitter Selection. Sensors 2024, 24, 1906. https://doi.org/10.3390/s24061906
Shi G, Cheng W, Gao X, Wei F, Zhang H, Wang Q. Enhancing Security in Visible Light Communication: A Tabu-Search-Based Method for Transmitter Selection. Sensors. 2024; 24(6):1906. https://doi.org/10.3390/s24061906
Chicago/Turabian StyleShi, Ge, Wei Cheng, Xiang Gao, Fupeng Wei, Heng Zhang, and Qingzheng Wang. 2024. "Enhancing Security in Visible Light Communication: A Tabu-Search-Based Method for Transmitter Selection" Sensors 24, no. 6: 1906. https://doi.org/10.3390/s24061906
APA StyleShi, G., Cheng, W., Gao, X., Wei, F., Zhang, H., & Wang, Q. (2024). Enhancing Security in Visible Light Communication: A Tabu-Search-Based Method for Transmitter Selection. Sensors, 24(6), 1906. https://doi.org/10.3390/s24061906