
Evaluation Research of the Effects of Longitudinal Speed Reduction Markings on Driving Behavior: A Driving Simulator Study


Abstract
:1. Background
2. Methods
2.1. Subjects
2.2. Apparatus
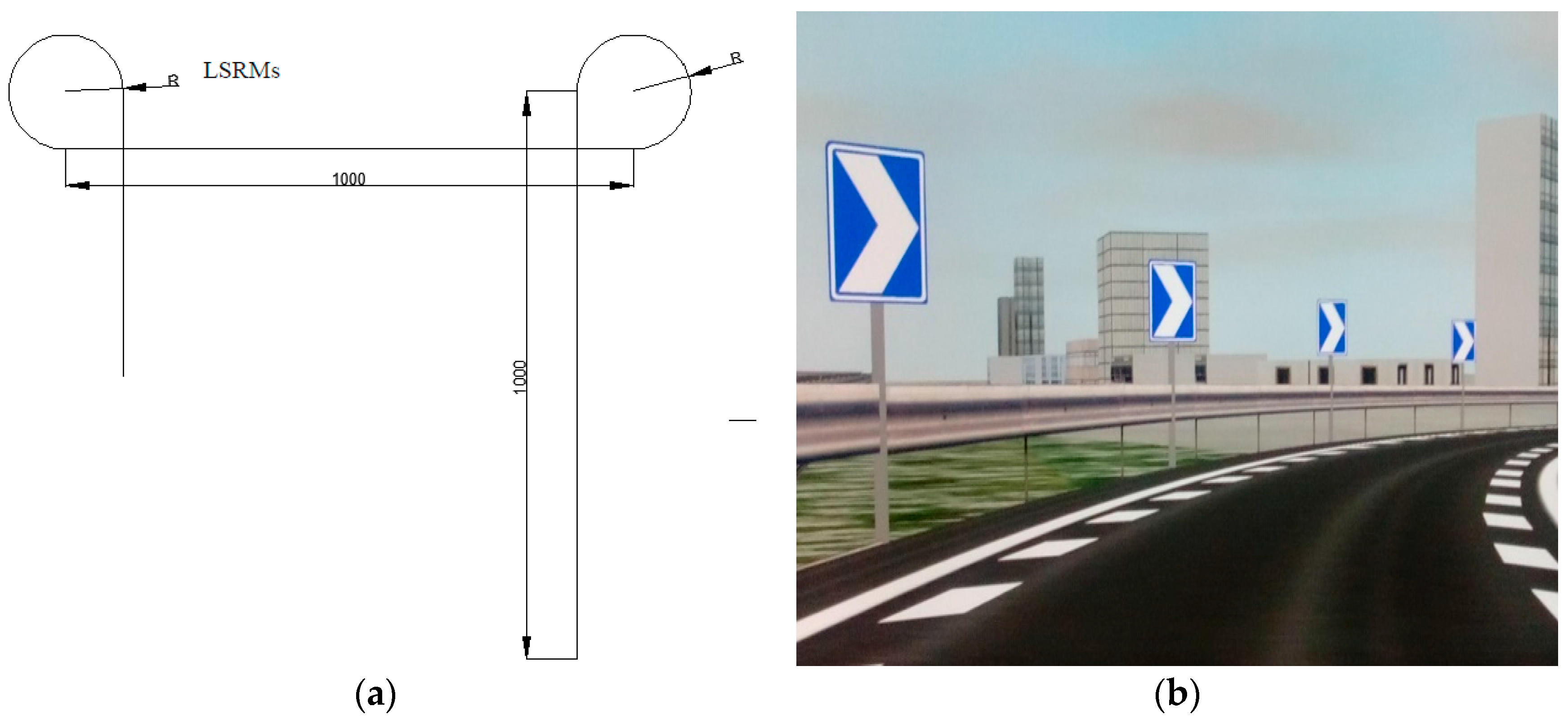
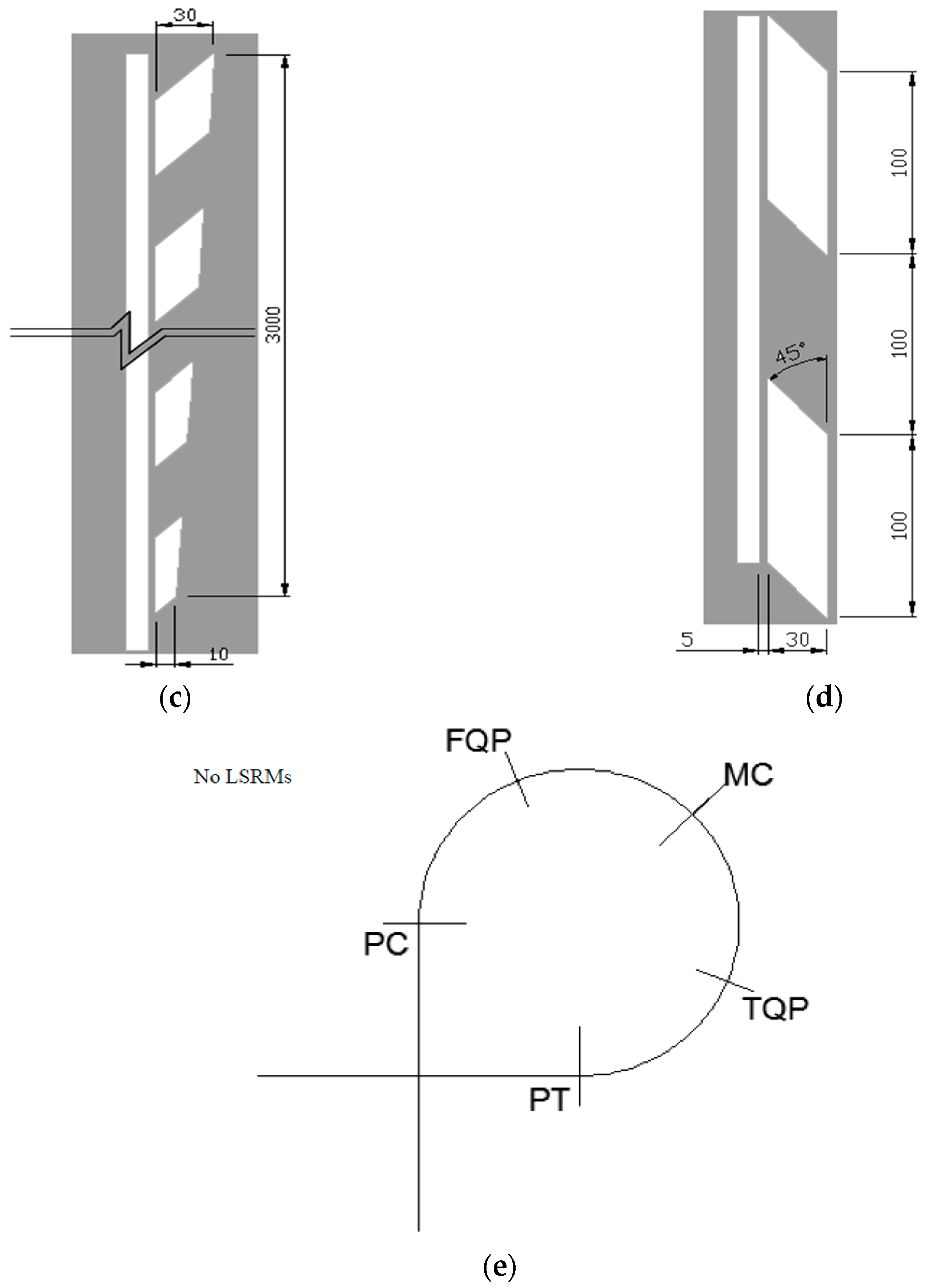
2.3. Scenarios
2.4. Procedures
3. Analysis and Results
3.1. The Entire Connector
- 1
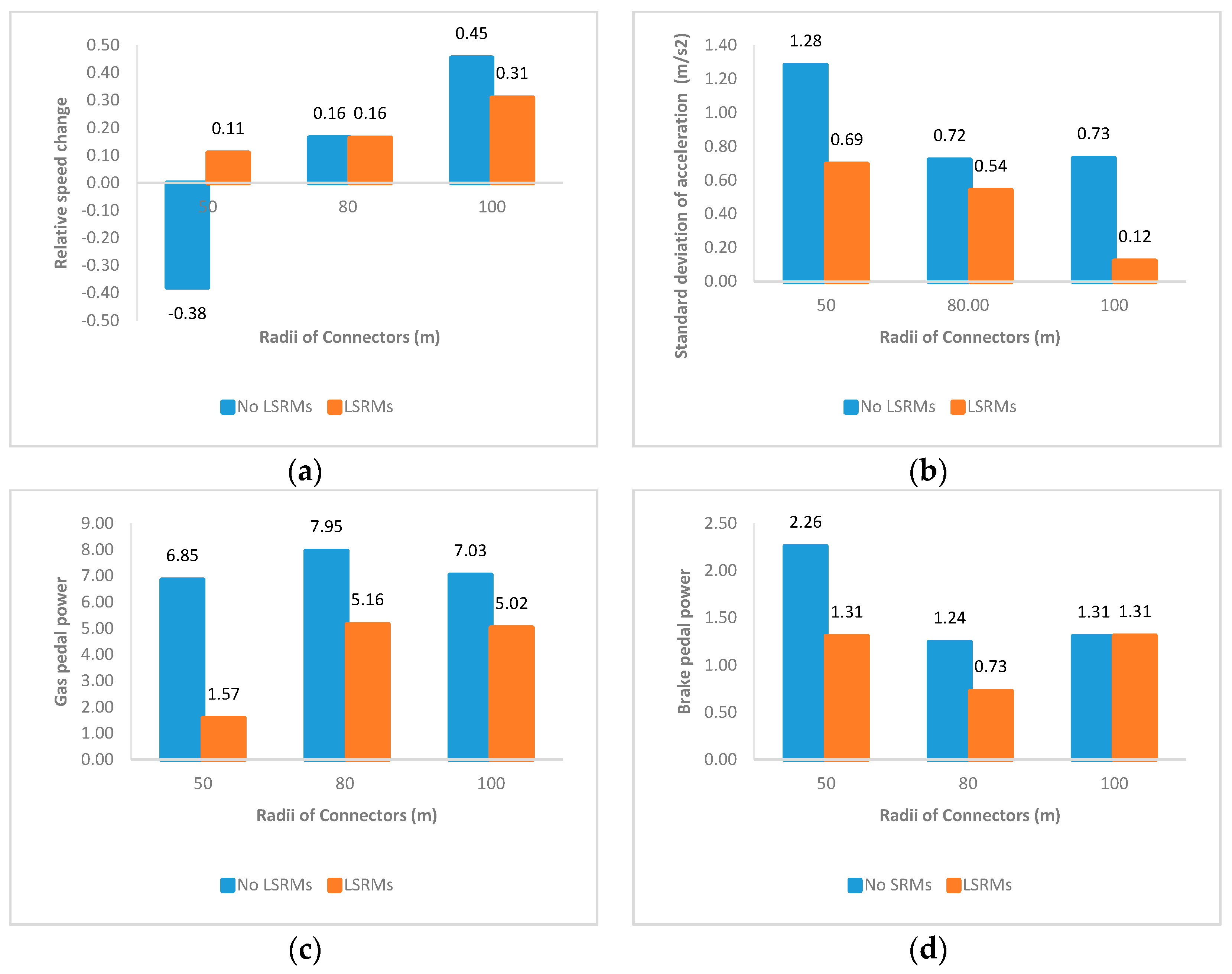
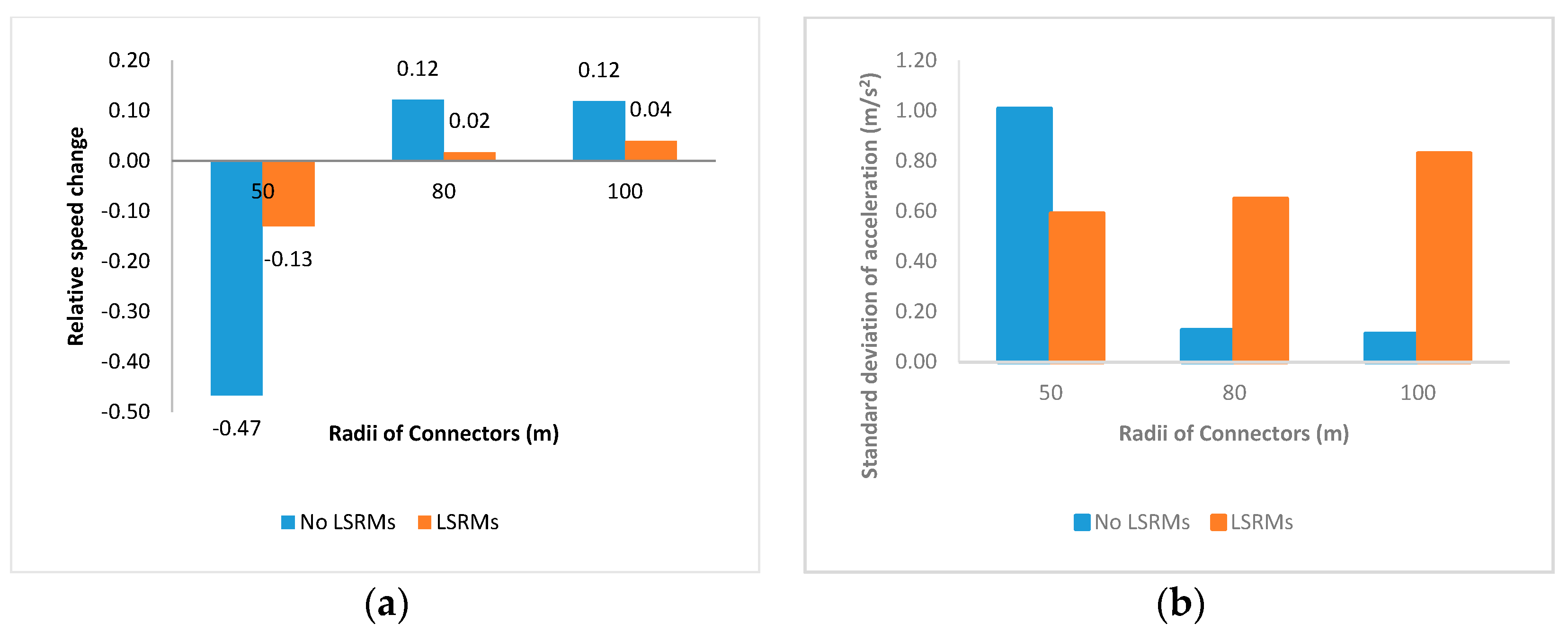
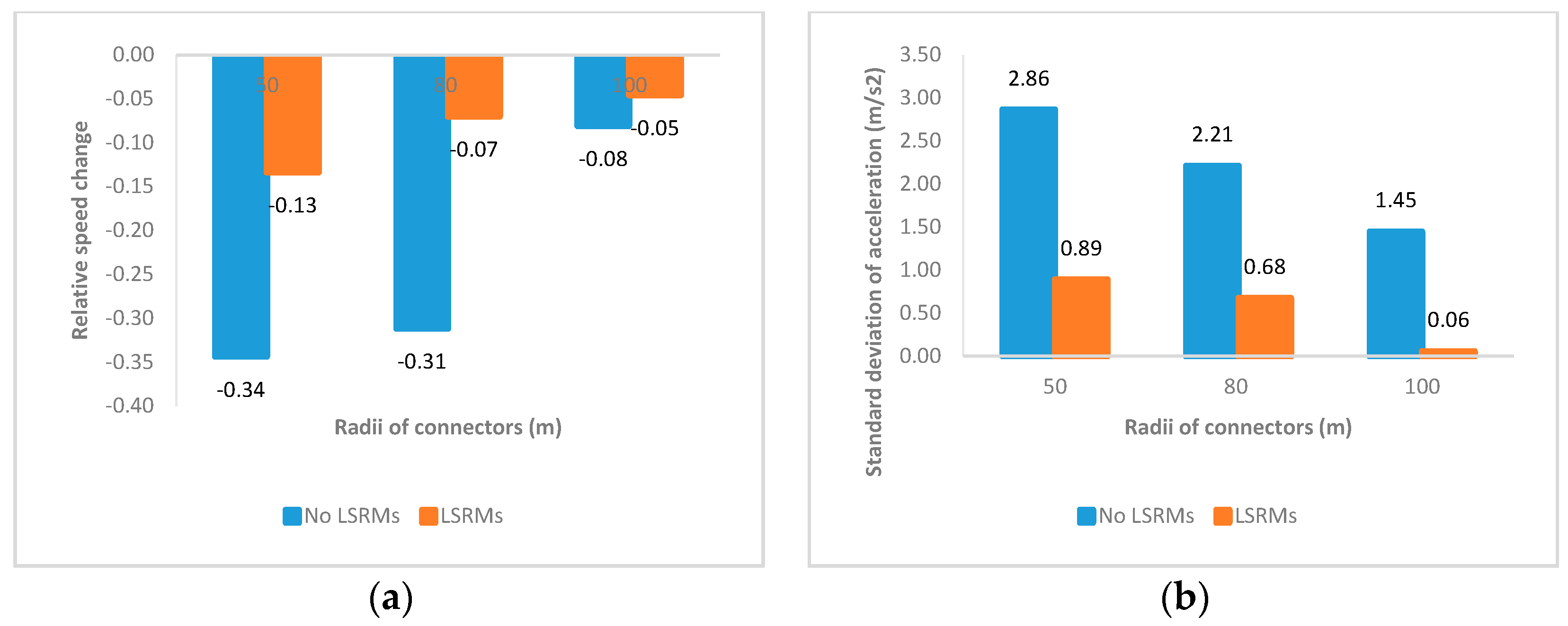
- From Figure 3a, it was obvious that the relative speed changes in connectors paved with LSRMs in all three scenarios were positive; that is, LSRMs failed to make participants slow down when they exited the connector. Meanwhile, in Figure 3d, the brake pedal forces related to LSRMs were also lower than No LSRMs, which meant that LSRMs also seemed to be ineffective in prompting participants to apply more force on the brake pedal.
- 2
- In Figure 3b,c, it seemed that both standard deviations of acceleration and gas pedal powers in interchange connectors paved with LSRMs in all three scenarios were lower than No LSRMs. It was assumed that LSRMs would have better effects on the adaptability and driver’s gas pedal performance.
- 3
- Comparing between Figure 3c,d, it was apparent that gas pedal power and brake pedal power in connectors without LSRMs were higher than the ones with LSRMs. According to the definitions mentioned above, lower power might refer to lower press intensity, shorter press duration time, less press frequencies, or the interaction effects. Based on this, it was implied that drivers would conduct more operating performances in connecters without LSRMs, while provide less power in connectors with LSRMs. It implied that LSRMs would control driver’s gas and brake pedal use to some extent.
3.2. Continuous Sections
3.2.1. The PC-FQP Section
- 1
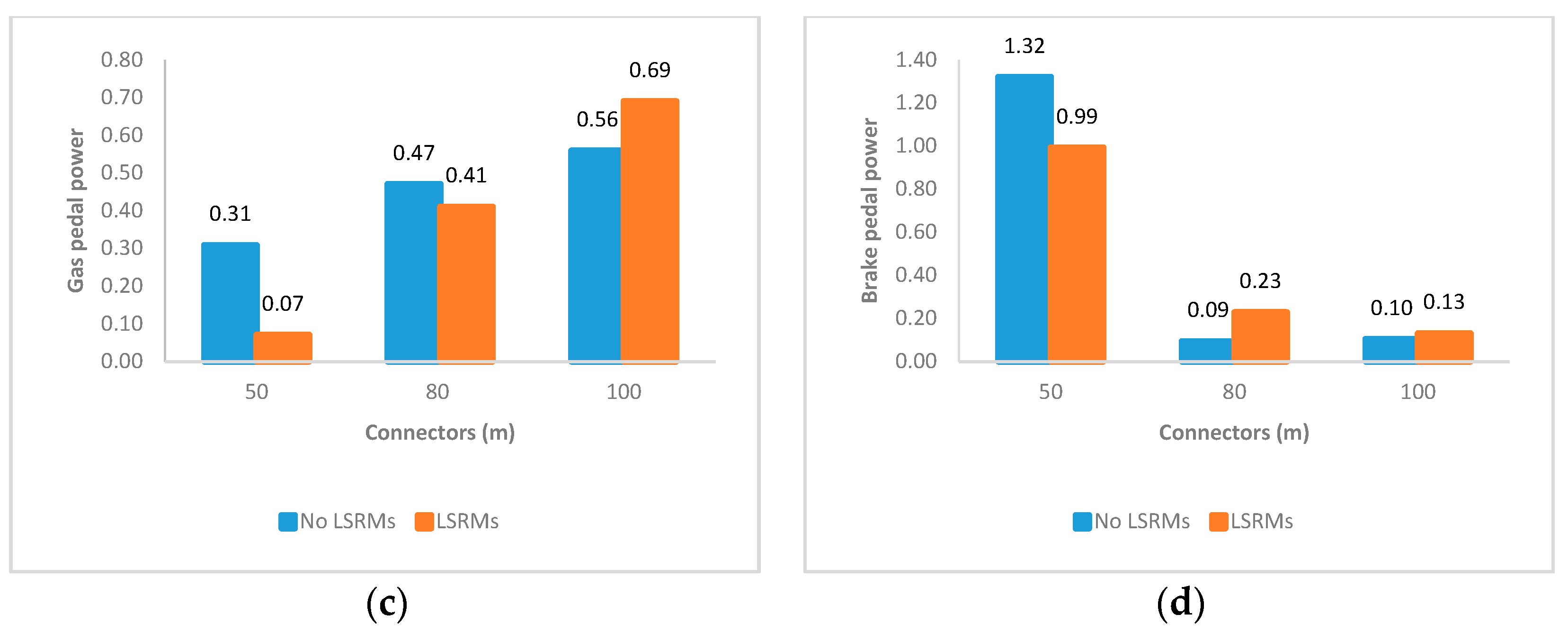
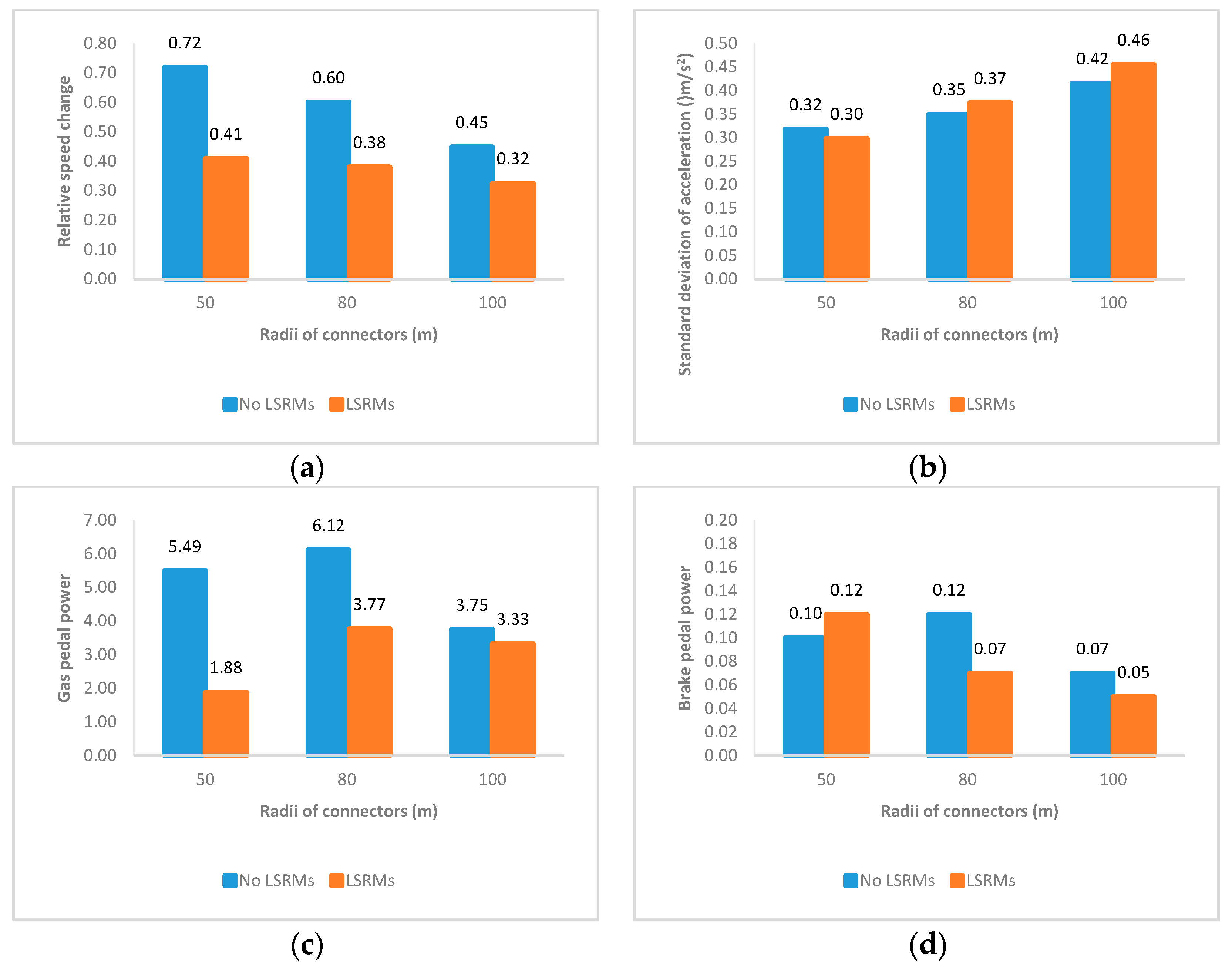
- From Figure 5a, it is obvious that participants decelerate in interchange connectors with a radius of 50 m and speed up in connectors with a radius of 80 m and 100 m. In addition, considering the speed reduction in connectors paved by LSRMs was smaller than the one in connectors with no LSRMs in the 50-R scenario, it implied that sharp curve might have better effects on making drivers decelerate than LSRMs.
- 2
- In Figure 5b, without LSRMs, it seemed that participants would drive more smoothly in connectors with larger radii. On the contrary, participants drove more smoothly in connectors with LSRMs than in connectors without LSRMs when the radius was 50 m; nevertheless, this smoothness weakened as the increase of radii. Compared with the results of relative speed change in the same section, it was implied that LSRMs would have better effectiveness and adaptability in the PC-FQP section when the radius was 50 m.
- 3
- In Figure 5c,d, it was apparent that subjects would press harder on the gas pedal and apply less pressure to the brake pedal when the radius of the interchange connectors increased, regardless of presence of LSRMs. Similar to (1) and (2), it could be inferred that LSRMs also have better effects on operation power in the first section of interchange connectors when the radius was 50 m, which further implies that LSRMs would influence subjects’ decelerating consciousness in the first section with a 50-m radius. Compared to Figure 5a, however, it seemed that such influence on decelerating consciousness did not bring speed reduction.
3.2.2. The FQP-MC Section
- 1
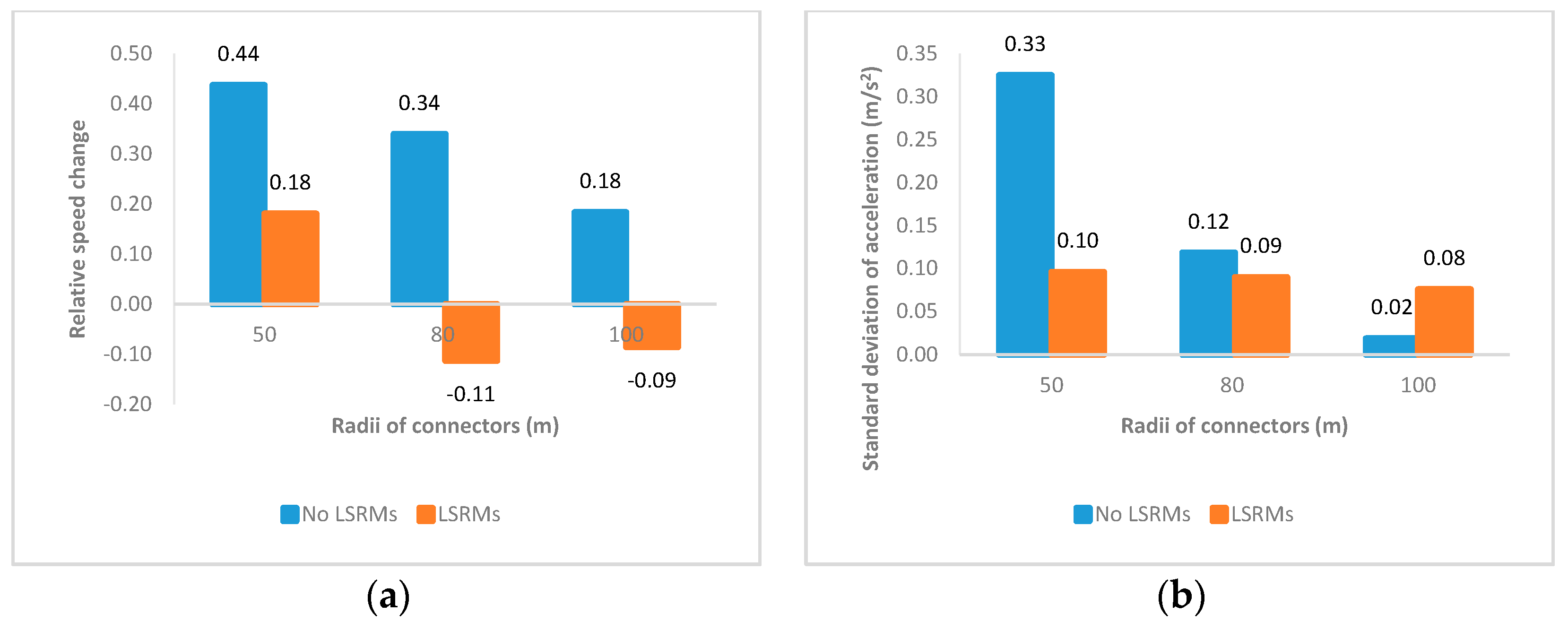
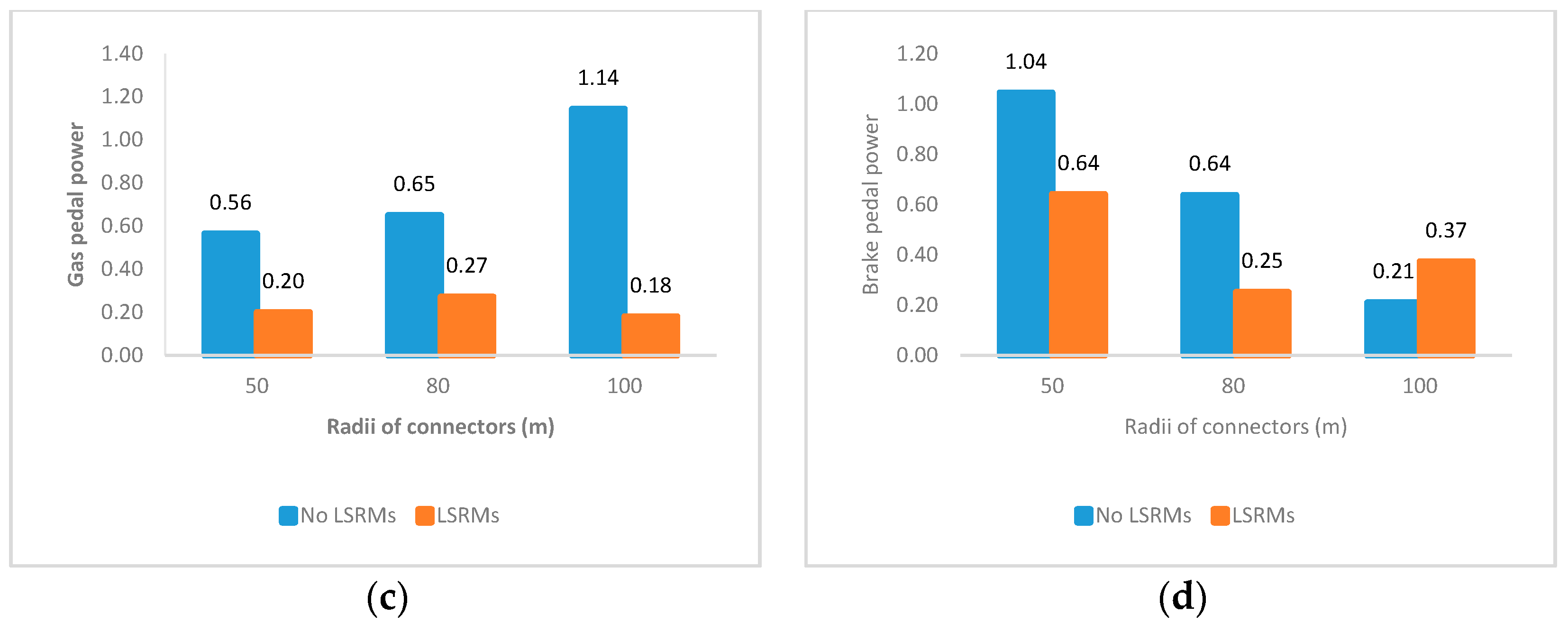
- In Figure 6a, participants tended to speed less in the 80-R and 100-R scenarios without LSRMs, and even reduced speeds in the 80-R and 100-R scenarios with LSRMs. Combining with Figure 4a, this could imply that LSRMs would make subjects decelerate in the first quarter section when the radius was 50 m, and in the second quarter section when the radius was 80 m and 100 m. Besides, LSRMs would also restrain drivers from speeding more in the FQP-MC section.
- 2
- 3
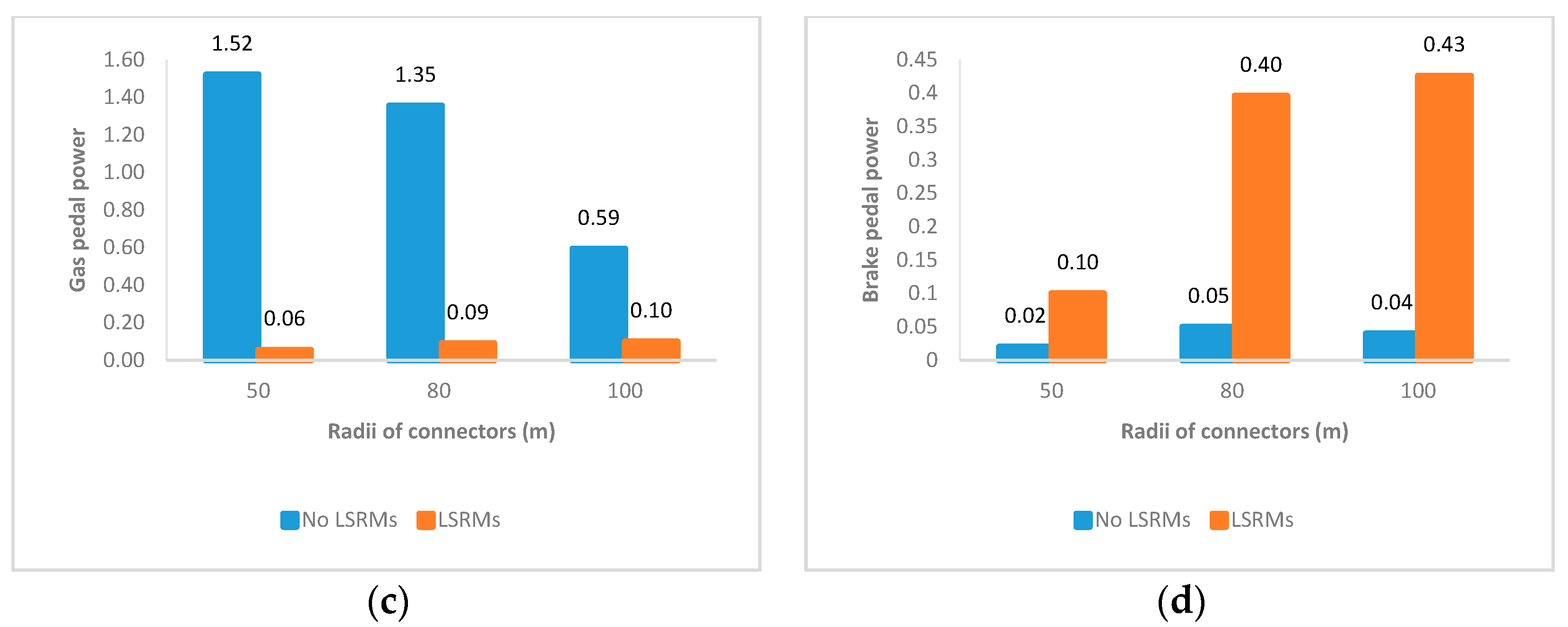
- In Figure 6c,d, when the interchange connector was not paved with LSRMs, participants preferred to press gas pedal, rather than the brake pedal, and provided less power on the gas pedal with the increase in radii. On the contrary, LSRMs would make drivers focus more on the brake pedal to reduce speed, and drivers provided more power on the brake pedal when the radii were 80 m and 100 m, which was identical to (1).
3.2.3. The MC-TQP Section
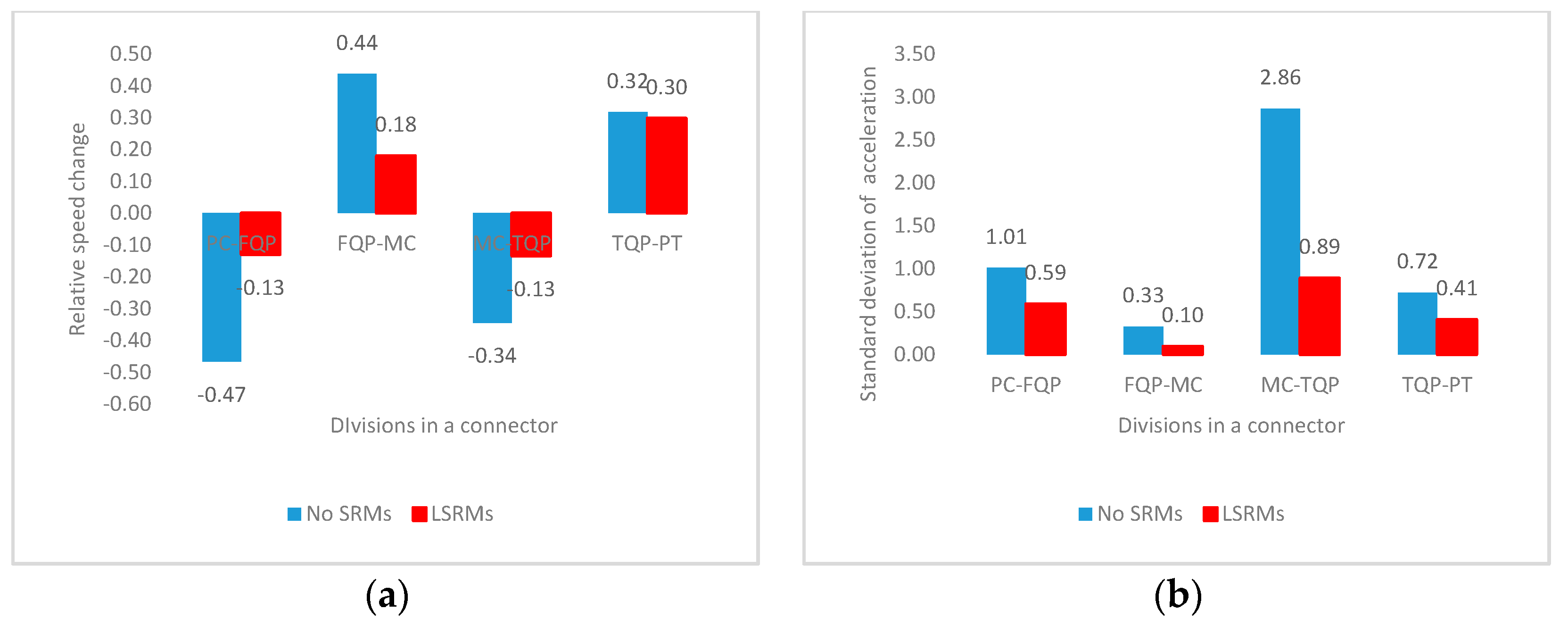
- 1
- In Figure 7a, participants decelerated in the third quarter section of interchange connectors, regardless of the radius and whether LSRMs were installed. As the radius increased, the extent of decelerating decreased. Moreover, it seemed that the deceleration with LSRMs was weaker than the deceleration without LSRMs. However, it did not mean that LSRMs have lost effectiveness in this section. In fact, in Figure 7b, we could see that the standard deviation of accelerations in connectors with LSRMs were lower than the ones with No LSRMs. Therefore, it was probably that LSRMs would make drivers decelerate and maintain a steady state in the MC-TQP section.
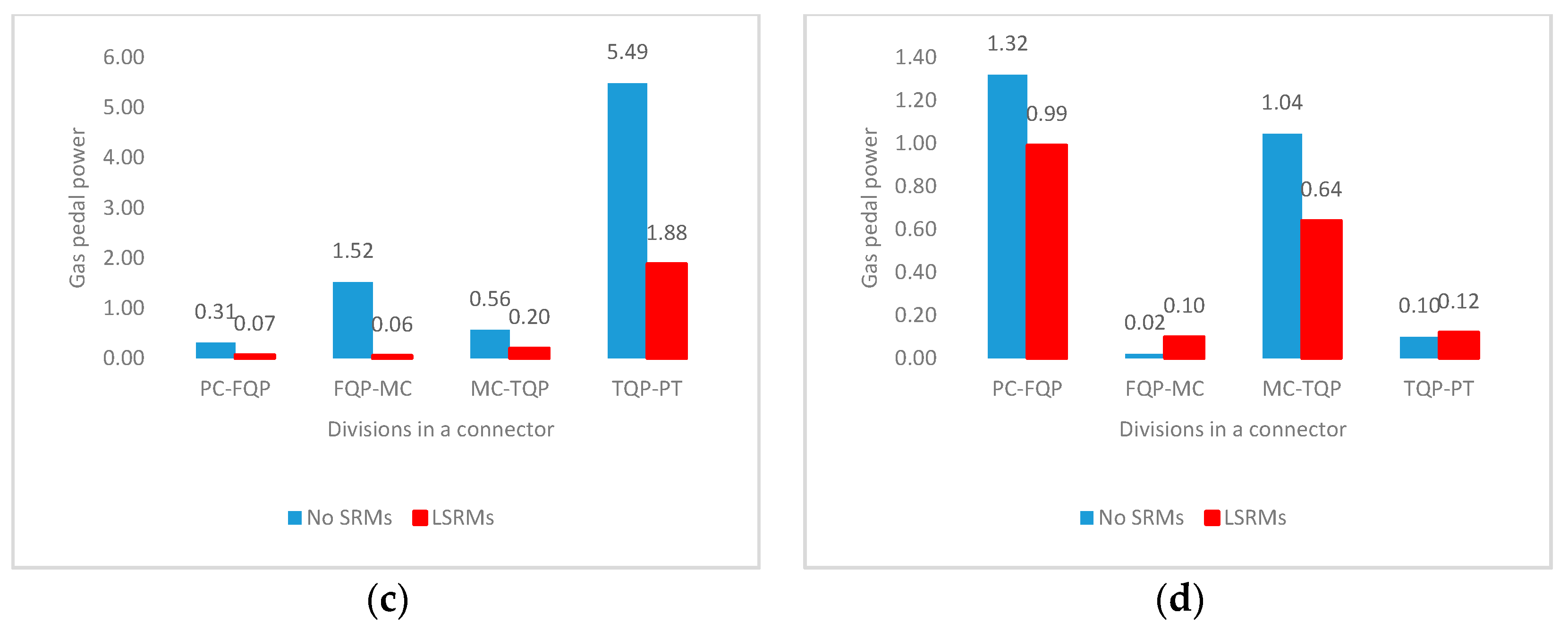
- 2
- In Figure 7c,d, subjects conducted much more operating performances in the MC-TQP section without LSRMs, and provided less force on the gas pedal and brake pedal in this section with LSRMs, which led to relatively low speed change and low standard deviation of acceleration. Such characteristics of pedal use contributed to the obvious speed change and high standard deviation of acceleration in this section without LSRMs. On the contrary, paved with LSRMs, subjects would travel in relatively low speed and perform less adjustment of gas and brake pedal, which would guarantee subject’s safety and comfort.
3.2.4. The TQP-PT Section
3.3. Statistical Analysis in Four Sections
- 1
- LSRMs could significantly reduce vehicles’ travel speed in the second and the final section of interchange connectors. Although LSRMs could make drivers decelerate in the first and third quarter sections of the connectors (see Figure 4a and Figure 6a), the effects of LSRMs were significantly smaller than No LSRMs. However, we could still conclude that LSRMs were able to control speed to different degrees in interchange connectors.
- 2
- In the PC-FQP, FQP-MC, and MC-TQP sections, LSRMs could significantly enhance drivers’ adaptability when the radius was 50 m.
- 3
- In all four sections, LSRMs could also significantly control drivers’ gas pedal operation; particularly, this phenomenon existed in the FQP-MC and MC-TQP sections with all three radii.
- 4
- Compared to gas pedal power, LSRMs could only prompt drivers to apply more brake pedal operations in the FQP-MC section, when the radii were 80 m and 100 m.
- 1
- In the PC-FQP section, from the aspect of vehicle maneuvering and driver’s brake pedal use, there might be no need to pave LSRMs in this section, regardless of the radius; however, referring to driver’s adaptability and gas pedal use, SRMs could be deployed in this section when the radius was 50 m. In other words, LSRMs are needed in the PC-FQP section of 50 m-radius connectors, and are not needed for sections with a radius of 80 m and above.
- 2
- In the FQP-MC section, LSRMs could significantly make drivers decelerate, improve driver’s adaptability or limit driver’s gas pedal and brake pedal use, although such effects were different for different radii. Therefore, LSRMs are recommended for the FQP-MC sections with a radius of 50 m, 80 m or 100 m.
- 3
- In the MC-TQP section, similar to (1), if the intention is to force drivers to slow down, LSRMs are not recommended to be used in this section; if the primary goal is to improve driver’s adaptability and limit driver’s gas pedal use, LSRMs could be considered to be deployed in this section regardless of radii. Thus, LSRMs should be used in the MC-TQP section when the radius is 50 m, 80 m or 100 m.
- 4
- In the TQP-PT section, LSRMs should be used when the radius is 50 m or 80 m, since LSRMs could significantly control speed and driver’s gas pedal use.
4. Discussion and Future Work
5. Conclusions
- LSRMs could reduce vehicles’ travel speed and limit drivers’ willingness to speed up in the entire interchange connector when the radius was 50 m, and such effects were stronger in the second and the final section of the connectors. When the radii were 80 m and 100 m, LSRMs tended to affect speed or restrain drivers’ willingness to accelerate in the last three quarters of the connectors.
- LSRMs could enhance drivers’ adaptability in the first three quarters of the interchange connectors when the radius was 50 m, and could also make driver’s travel more comfortably in the third quarter section of the connector with all three radii.
- LSRMs could control driver’s gas pedal operation throughout the entire connector when the radius was 50 m. On the other hand, LSRMs also prompted drivers to apply less force on gas pedal in the last three quarters of the interchange connectors when the radii were 80 m and 100 m.
- LSRMs only prompted drivers to conduct more brake pedal operations in the second section, when the radii were 80 m and 100 m.
- The second quarter section of the connector—the FQP-MC section—seemed to be the key section in an interchange connector, on the basis of this experimental condition, where LSRMs have better effects on influencing vehicle maneuvering and drivers’ operation performance.
- On the one hand, LSRMs should be used in the first quarter section of connectors when the radius was 50 m, and in the third quarter section regardless of radii. On the other hand, LSRMs should be used in the second quarter section regardless of radii, and in the final quarter section when the radii were 50 m and 80 m.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Statistics of Traffic Crashes in China in 2012. Available online: http://www.tranbbs.com/MResearch/Daten/MResearch_111913.shtml (accessed on 18 March 2013).
- Standardization Administration of the People’s Republic of China (SAC). Road Traffic Signs and Markings (GB5768-2009); SAC: Beijing, China, 2009. [Google Scholar]
- Maroney, S.; Dewar, R. Alternatives to enforcement in modifying the speeding behavior of drivers. Transp. Res. Rec. 1988, 1111, 121–125. [Google Scholar]
- Charlton, S.G. Perceptual and attentional effects on driver’s speed selection at curves. Accid. Anal. Prev. 2004, 36, 877–884. [Google Scholar] [CrossRef] [PubMed]
- Gates, T.J.; Qin, X.; Noyce, D.A. Effectiveness of experimental transverse-bar pavement marking as speed-reduction treatment on freeway curves. Transp. Res. Rec. 2008, 2056, 95–103. [Google Scholar] [CrossRef]
- Katz, B.J. Peripheral Transverse Pavement Markings for Speed Control. Ph.D. Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, April 2007. [Google Scholar]
- Ding, H.; Zhao, X.H.; Rong, J.; Ma, J.M. Experimental research on the effectiveness of speed reduction markings based on driving simulation: A case study. Accid. Anal. Prev. 2013, 60, 211–218. [Google Scholar] [CrossRef] [PubMed]
- Ding, H.; Zhao, X.H.; Rong, J.; Ma, J.M. Experimental research on the effectiveness and adaptability of speed reduction markings in downgrade sections on urban roads: A driving simulation study. Accid. Anal. Prev. 2015, 75, 119–127. [Google Scholar] [CrossRef] [PubMed]
- Ding, H.; Zhao, X.H.; Rong, J.; Ma, J.M. Experimental research on the effectiveness of speed reduction markings based on driver’s operating performance: A driving simulation study. Transp. Res. Part F Traffic Psychol. Behav. 2015, 75, 119–127. [Google Scholar]
- Kaber, D.B.; Liang, Y.L.; Zhang, Y.; Rogers, M.L.; Gangakhedkar, S. Experimental driver performance effects of simultaneous visual and cognitive distraction and adaptation behavior. Transp. Res. Part F Traffic Psychol. Behav. 2012, 15, 491–501. [Google Scholar] [CrossRef]
- Zheng, F. Research on Design and Application of Road Speed Control Facilities. Master’s Thesis, Jilin University, Changchun, China, 2007. [Google Scholar]
- Comte, S.L.; Jamson, A.H. Traditional and innovative speed-reducing measures for curves: An investigation of driver behaviour using a driving simulator. Saf. Sci. 2000, 36, 137–150. [Google Scholar] [CrossRef]
- Rakauskas, M.E.; Gugerty, L.J.; Ward, N.J. Effects of naturalistic cell phone conversations on driving performance. J. Saf. Res. 2004, 35, 453–464. [Google Scholar] [CrossRef] [PubMed]
- Mulder, M.; Mulder, M.; Paassen, M.M.V.; Abbink, D.A. Haptic gas pedal feedback. Ergonomics 2008, 51, 1710–1720. [Google Scholar] [CrossRef] [PubMed]
- Rosey, F.; Auberlet, J. Driving simulator configuration impacts driver’s behavior and control performance: An example with studies of a rural. Transp. Res. Part F Traffic Psychol. Behav. 2014, 27, 99–111. [Google Scholar] [CrossRef]
- Saffarian, M.; Winter, J.C.F.D.; Senders, J.W. Measuring driver’s visual information needs during braking: A simulator study using a screen-occlusion method. Transp. Res. Part F Traffic Psychol. Behav. 2015, 33, 48–65. [Google Scholar] [CrossRef]
- Helman, S.; Reed, N. Validation of the driver behaviour questionnaire using behavioural data from an instrumented vehicle and high-fidelity driving simulator. Accid. Anal. Prev. 2015, 75, 245–251. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.S.; Wang, T.; Tarko, A.; Tremont, P.J. The influence of combined alignments on lateral acceleration on mountainous freeways: A driving simulator study. Accid. Anal. Prev. 2015, 76, 110–117. [Google Scholar] [CrossRef] [PubMed]
- Meuleners, L.; Fraser, M. A validation study of driving errors using a driving simulator. Transp. Res. Part F Traffic Psychol. Behav. 2015, 29, 14–21. [Google Scholar]
- Xu, S.L. The Study on the Discriminating Method of Driving Fatigue Based on Physiological Signal. Master’s Thesis, Beijing University of Technology, Beijing, China, March 2012. [Google Scholar]
- China Has More Than 0.236 Billion Licensed Drivers and 0.225 Billion Registered Vehicles. Available online: http://news.mycar168.com/2012/02/263721.html (accessed on 30 May 2012). (In Chinese)
- Ben-Bassat, T.; Shinar, D. Effect of shoulder width, guardrail and roadway geometry on driver perception and behavior. Accid. Anal. Prev. 2011, 43, 2142–2152. [Google Scholar] [CrossRef] [PubMed]
- Van der Horst, R.; de Ridder, S. Influence of roadside infrastructure on driving behavior: Driving simulator study. Transp. Res. Rec. J. Transp. Res. 2007, 2018, 36–44. [Google Scholar] [CrossRef]
- Daniels, S.; Vanrie, J.; Dreesen, A.; Brijs, T. Additional road markings as an indication of speed limits: Results of a field experiment and a driving simulator study. Accid. Anal. Prev. 2010, 42, 953–960. [Google Scholar] [CrossRef] [PubMed]
- Horberry, T.; Anderson, J.; Regan, M.A. The possible safety benefits of enhanced road markings: A driving simulator evaluation. Transp. Res. Part F Traffic Psychol. Behav. 2006, 9, 77–87. [Google Scholar] [CrossRef]
- The Ministry of Housing and Urban-Rural Development of the People’s Republic of China (MOHURD). Code for Design of Urban Road Engineering (CJJ37-2012); MOHURD: Beijing, China, 2012. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario No. | Radii (m) | Length of Connector (m) | Length of Entire Scenario (m) | Length of Each Section (m) | Lane Width (m) |
|---|---|---|---|---|---|
| 1 | 50 | 235.5 | 2971.0 | 58.88 | 3.75 |
| 2 | 80 | 376.8 | 3253.6 | 94.20 | |
| 3 | 100 | 471.0 | 3442.0 | 117.75 |
| Indicators | PC-FQP | FQP-MC | MC-TQP | TQP-PT | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 50 m | 80 m | 100 m | 50 m | 80 m | 100 m | 50 m | 80 m | 100 m | 50 m | 80 m | 100 m | |
| Relative speed change | × | √ | √ | √ | × | × | √ | √ | ||||
| Standard deviation of acceleration | √ | × | × | √ | √ | √ | √ | |||||
| Gas pedal force | √ | √ | √ | √ | √ | √ | √ | √ | √ | |||
| Brake pedal force | × | √ | √ | × | × | |||||||
| Radii | No SRMs | LSRMs | ||
|---|---|---|---|---|
| Mean | Std. | Mean | Std. | |
| 50 m | 54.9 | 17.7 | 54.7 | 19.1 |
| 80 m | 56.5 | 15.1 | 57.9 | 18.2 |
| 100 m | 60.2 | 18.2 | 59.1 | 17.3 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, H.; Zhao, X.; Ma, J.; Rong, J. Evaluation Research of the Effects of Longitudinal Speed Reduction Markings on Driving Behavior: A Driving Simulator Study. Int. J. Environ. Res. Public Health 2016, 13, 1170. https://doi.org/10.3390/ijerph13111170
Ding H, Zhao X, Ma J, Rong J. Evaluation Research of the Effects of Longitudinal Speed Reduction Markings on Driving Behavior: A Driving Simulator Study. International Journal of Environmental Research and Public Health. 2016; 13(11):1170. https://doi.org/10.3390/ijerph13111170
Chicago/Turabian StyleDing, Han, Xiaohua Zhao, Jianming Ma, and Jian Rong. 2016. "Evaluation Research of the Effects of Longitudinal Speed Reduction Markings on Driving Behavior: A Driving Simulator Study" International Journal of Environmental Research and Public Health 13, no. 11: 1170. https://doi.org/10.3390/ijerph13111170
APA StyleDing, H., Zhao, X., Ma, J., & Rong, J. (2016). Evaluation Research of the Effects of Longitudinal Speed Reduction Markings on Driving Behavior: A Driving Simulator Study. International Journal of Environmental Research and Public Health, 13(11), 1170. https://doi.org/10.3390/ijerph13111170