
Risk-Based Dynamic Security Assessment for Power System Operation and Operational Planning




Abstract
:1. Introduction
2. The AFTER Risk-Based Dynamic Security Assessment Framework
2.1. AFTER Methodology and Tool
- Rank failure probability of all components into decreasing order, creating a map C(l) = l′ between l and l′ (indexes of original and ordered components) s.t. .
- Calculate the cumulative sum for each ordered component with index l′ .
- Find line lTOT whose F minimizes where α, the coefficient of the sum of failure probabilities of all components, is called “fraction of explained total failure probability”.
- Get minimum failure probability threshold PFTOT as: .
- Select components with failure probability higher than PFTOT.
2.2. Failure Probability Assessment: Validation and Data Availability
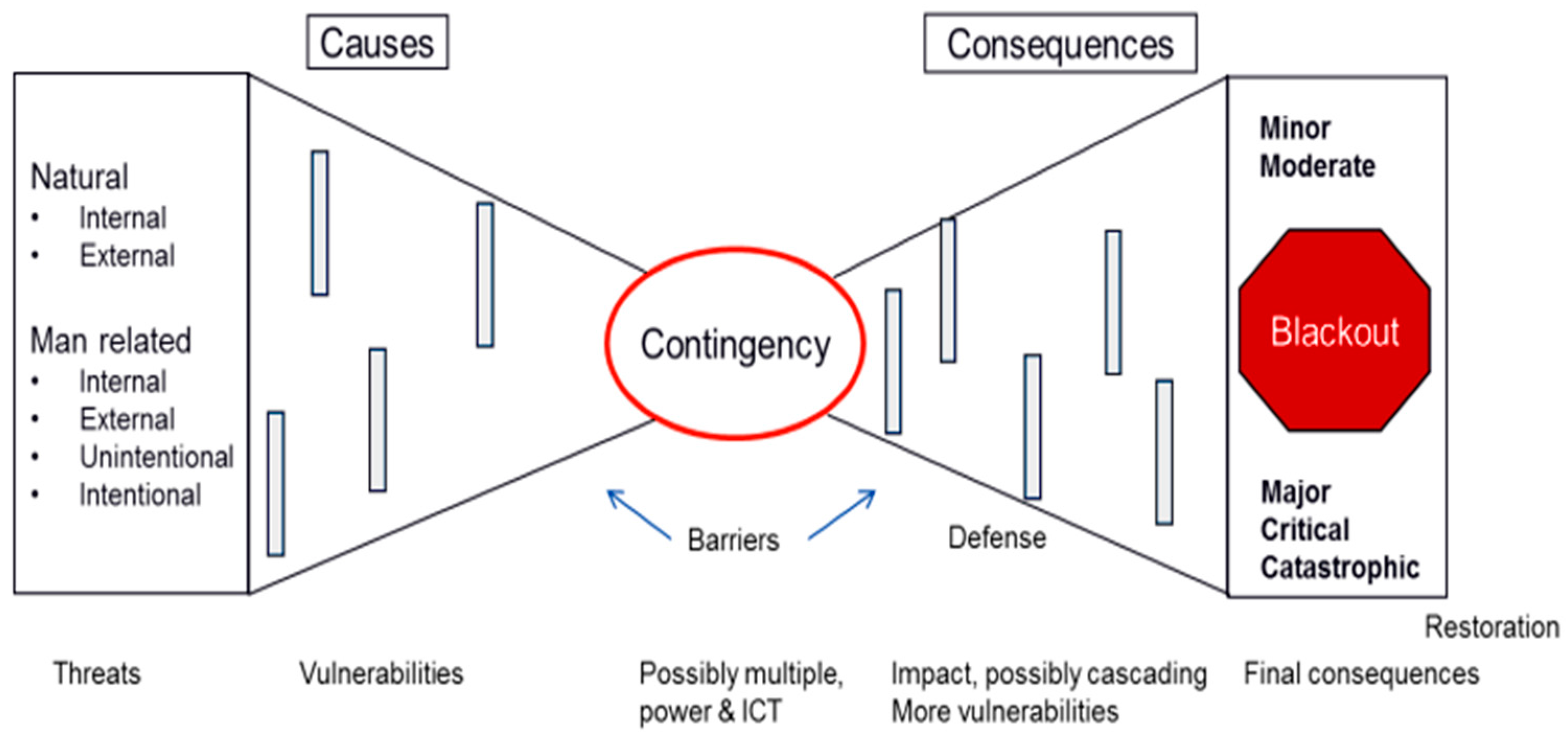
2.3. Contingency Definition in Dynamics
- Specific parameters of the fault (location, type, duration).
- Control, protection, and defense systems (which affect the behavior over fault-on and post-fault periods).
3. Contingency Impact and Risk Assessment
3.1. Transient Stability Impact
3.2. Voltage Stability Impact
3.3. Frequency Stability Impact
3.4. Risk Indicators
3.5. Assessing the Effect of Uncertaintites on Forecast PS State
3.6. RB-DSA Outcomes
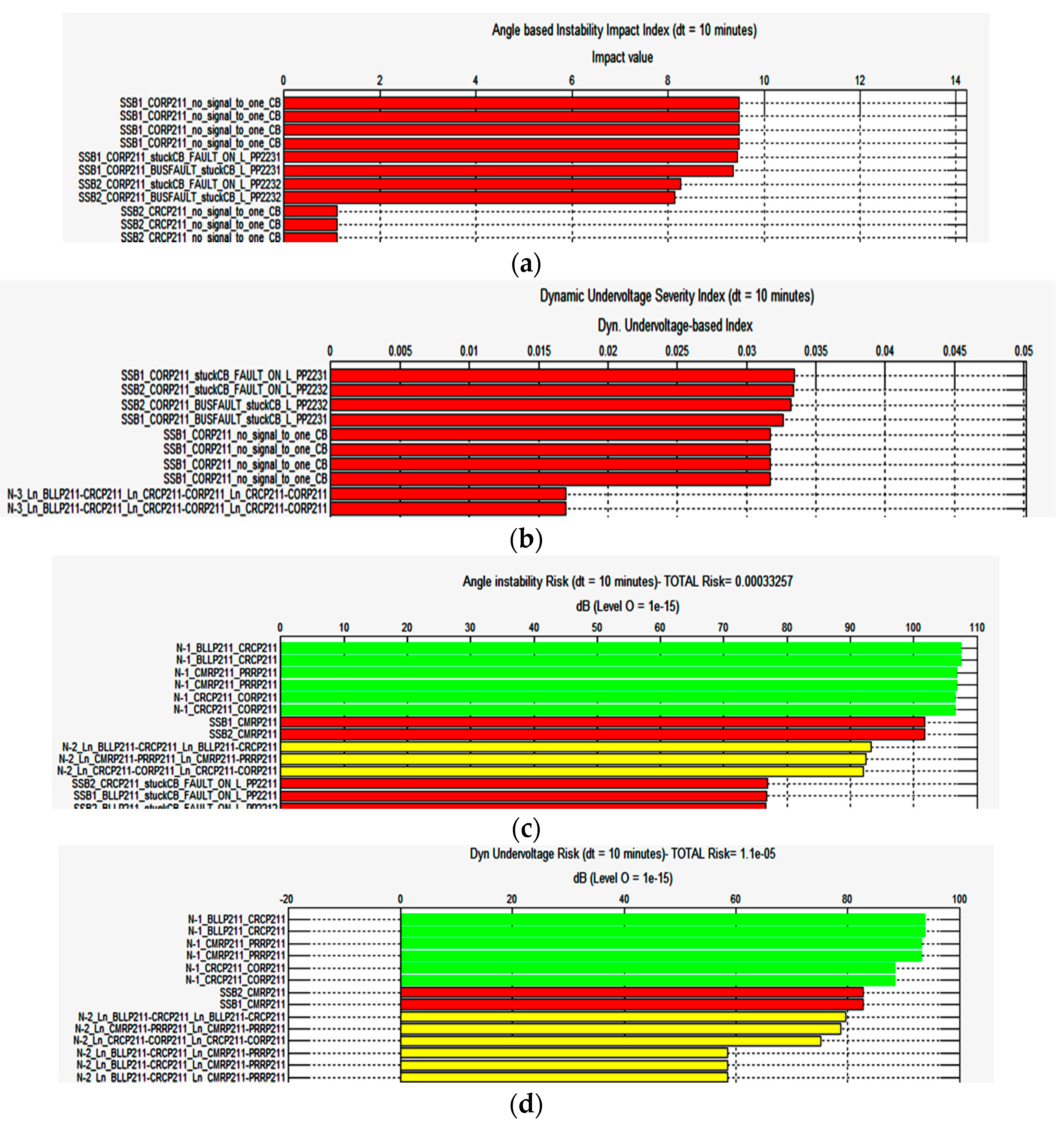
- Risk and impact based ranking lists of contingencies, to focus operators’ attention and let them deploy suitable corrective actions, for on-line operation applications.
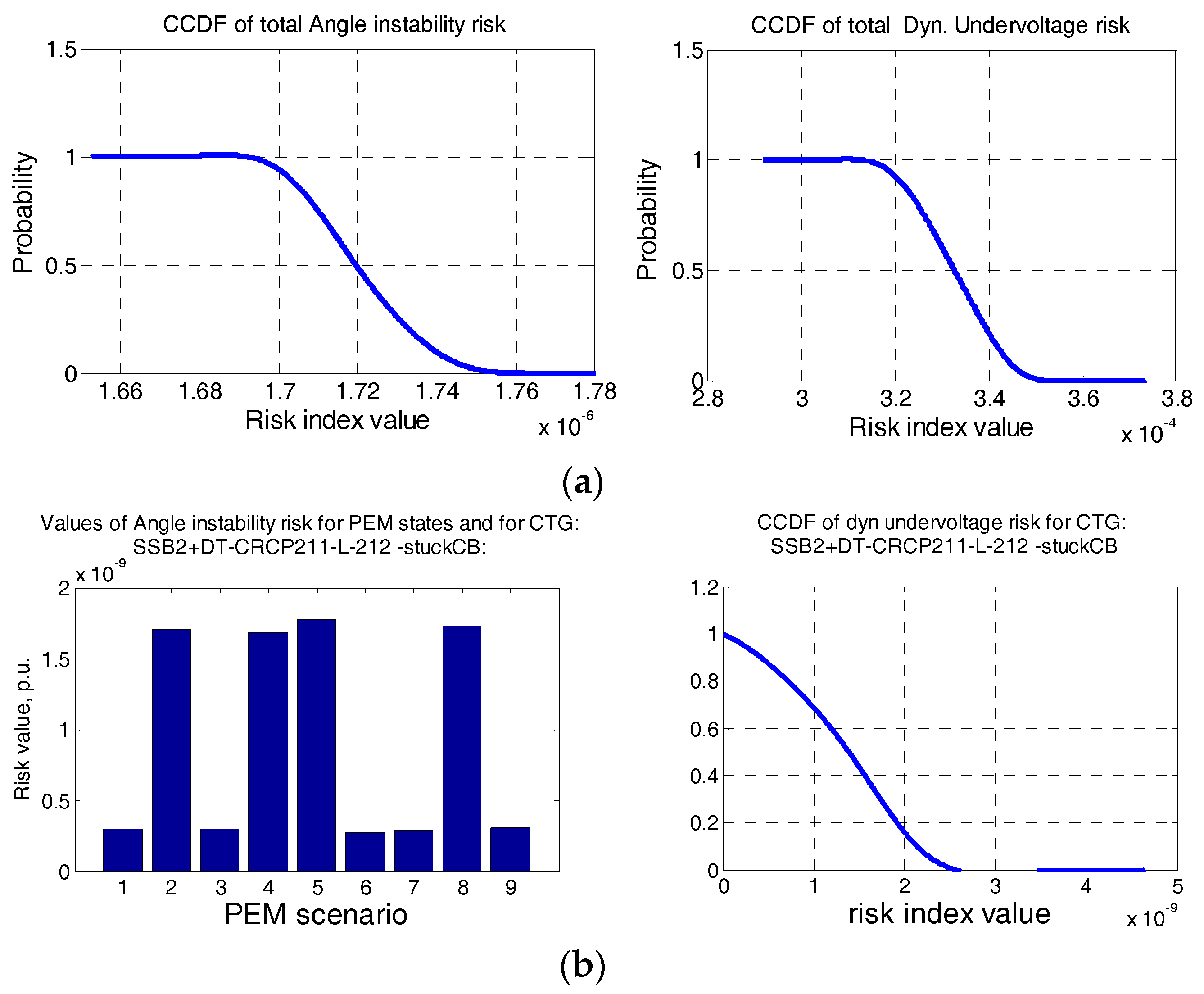
- Complementary Cumulative Distribution Functions (CCDF), i.e., the probability of overcoming a certain x-value) for risk and impact indicators referred to the whole threat scenario (global indicators) or to each contingency (individual indicators), useful for operational planners.
4. Test System and Simulation Results
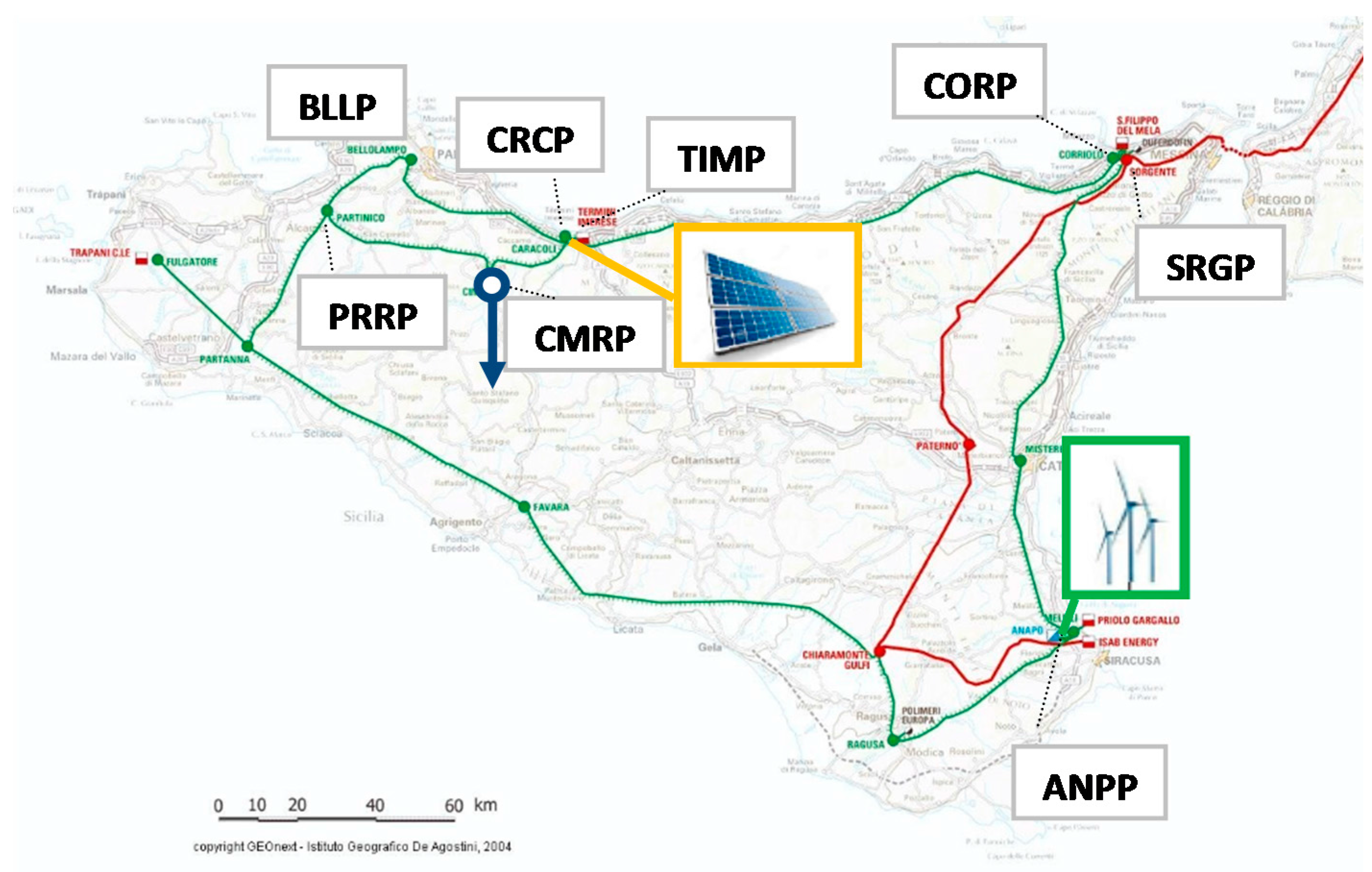
4.1. Test System and Simulation cases
4.2. RB-DSA Application for On-Line Operation
4.3. RB-DSA Application to Forecast PS State
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| Acronym | Meaning |
| ANN | Artificial Neural Network |
| BDP | Bus Differential Protection |
| CB | Circuit Breaker |
| CCDF | Complementary Cumulative Distribution Function |
| COA | Center Of Angles |
| DSA | Dynamic Security Assessment |
| DOV | Dynamic OverVoltage |
| DUV | Dynamic UnderVoltage |
| IS | Intelligent Systems |
| ISGA | Integral Squared Generator Angle |
| PEM | Point Estimate Method |
| PS | Power System |
| RB-DSA | Risk Based - Dynamic Security Assessment |
| RES | Renewable Energy Sources |
| ROCOF | Rate Of Change Of Frequency |
| TPNT | Third order Polynomial Normal Transformation |
| TSO | Transmission System Operator |
Appendix A. Third Order Polynomial Normal Transformation
References
- ENTSO-E. Technical Background and Recommendations for Defence Plans in the Continental Europe Synchronous Area; ENTSO-E: Brussels, Belgium, 31 January 2011. [Google Scholar]
- CIGRE. Review of the Current Status of Tools and Techniques for Risk-Based and Probabilistic Planning in Power Systems; WG C4–601, TB No. 434; CIGRE: Paris, France, Octobor 2010. [Google Scholar]
- Ni, M.; McCalley, J.D.; Vittal, V.; Tayyib, T. Online Risk-Based Security Assessment. IEEE Trans. Power Syst. 2003, 18, 258–265. [Google Scholar] [CrossRef]
- Nordgård, D.E.; Uhlen, K.; Bakken, B.H.; Løvås, G.G.; Voldhaug, L. Implementation of a probabilistic security assessment tool for determination of power transfer limits. In Proceedings of the CIGRE Session 2002, Paris, France, 25–30 August 2002. [Google Scholar]
- Rios, M.A.; Kirschen, D.S.; Jayaweera, D.; Nedic, D.P.; Allan, R.N. Value of Security: Modeling Time-Dependent Phenomena and Weather Conditions. IEEE Trans. Power Syst. 2002, 17, 543–548. [Google Scholar] [CrossRef]
- Zhou, D.Q.; Annakkage, U.D.; Rajapakse, A.D. Online monitoring of voltage stability margin using an artificial neural network. IEEE Trans. Power Syst. 2010, 25, 1566–1574. [Google Scholar] [CrossRef]
- Xu, Y.; Dong, Z.Y.; Zhao, J.; Zhang, P.; Wong, K.P. A Reliable Intelligent System for Real-Time Dynamic Security Assessment of Power Systems. IEEE Trans. Power Syst. 2012, 27, 1253–1263. [Google Scholar] [CrossRef]
- Xu, Y.; Zhang, R.; Zhao, J.; Dong, Z.Y.; Wang, D.; Yang, H.; Wong, K.P. Assessing Short-Term Voltage Stability of Electric Power Systems by a Hierarchical Intelligent System. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 1686–1696. [Google Scholar] [CrossRef] [PubMed]
- Preece, R.; Milanovic, J. Probabilistic Risk Assessment of rotor angle instability using fuzzy inference systems. In Proceedings of the 2015 IEEE Power and Energy Society General Meeting, Denver, WI, USA, 26–30 July 2015; Volume 30. No. 4. [Google Scholar]
- Lemaitre, C.; Panciatici, P. iTesla: Innovative tools for electrical system security within large areas. In Proceedings of the 2014 IEEE PES General Meeting (GM), National Harbor, MD, USA, 27–31 July 2014. [Google Scholar]
- NERC Standard TPL001-4. Transmission System Planning Performance Requirements; NERC: Washington, DC, USA, 2014. [Google Scholar]
- NERC Standard CIP-014-1. Physical Security; NERC: Washington, DC, USA, 2015. [Google Scholar]
- ENTSO-E. Operational Handbook; ENTSO-E: Brussels, Belgium, March 2009. [Google Scholar]
- AFTER. A Framework for Electrical Power Systems Vulnerability Identification, Defense and Restoration. EU FP7 Project No. 261788. Available online: http://www.after-project.eu/ (accessed on 1 April 2017).
- Ciapessoni, E.; Cirio, D.; Kjølle, G.; Sforna, M. An integrated framework for Power and ICT System Risk-based Security Assessment. In Proceedings of the 2013 IEEE PowerTech Grenoble (PowerTech 2013), Grenoble, France, 16–20 June 2013. [Google Scholar]
- Ciapessoni, E.; Cirio, D.; Kjølle, G.; Massucco, S.; Pitto, A.; Sforna, M. Probabilistic Risk-Based Security Assessment of Power Systems Considering Incumbent Threats and Uncertainties. IEEE Trans. Smart Grid 2016, 7, 2890–2903. [Google Scholar] [CrossRef]
- Barben, R. Vulnerability Assessment of Electric Power Supply under Extreme Weather Conditions. PhD Thesis, École Polytechnique Fédérale de Lausanne (EPFL), Lausanne, Switzerland, 2010. [Google Scholar]
- Ciapessoni, E.; Cirio, D.; Gaglioti, E.; Tenti, L.; Massucco, S.; Pitto, A. A Probabilistic Approach for Operational Risk Assessment of Power Systems. Proceedings of 2008 CIGRE Session, Paris, France, 24–29 August 2008. [Google Scholar]
- Giannuzzi, G. Criteri di Automazione Delle Stazioni a Tensione Uguale O Superiore a 120 kV; Addendum A.5 to TERNA Grid Code; Rome, Italy, February 2002. [Google Scholar]
- CIGRE. Final Report of the 2nd International Enquiry on HV Circuit-Breaker Failures and Defects in Service; SC 13 WG 13.06; CIGRE: Paris, France, 1994. [Google Scholar]
- Sevilla, F.R.S.; Vanfretti, L. Static stability indexes for classification of power system time-domain simulations. In Proceedings of the 2015 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 18–20 February 2015; pp. 1–5. [Google Scholar]
- Otomega, B.; van Cutsem, T. Undervoltage Load Shedding Using Distributed Controllers. IEEE Trans. Power Syst. 2007, 22, 1898–1907. [Google Scholar] [CrossRef]
- Alvarez, J.M.G. Critical Contingencies Ranking for Dynamic Security Assessment Using Neural Networks. In Proceedings of the 2009 15th International Conference on Intelligent System Applications to Power Systems, Curitiba, Brazil, 8–12 November 2009; pp. 1–6. [Google Scholar]
- Ciapessoni, E.; Cirio, D.; Pitto, A. Effect of renewable and load uncertainties on the assessment of power system operational risk. In Proceedings of the 2014 International Conference on Probabilistic Methods Applied to Power Systems (PMAPS), Durham, UK, 7–10 July 2014. [Google Scholar]
- Du, C.; Sannino, A.; Bollen, M.H.J. Analysis of the control Algorithms of Voltage–Source Converter HVDC. In Proceedings of the 2005 IEEE Russia Power Tech, Saint Petersburg, Russia, 27–30 June 2005. [Google Scholar]
- Hosking, J.R.M. L-moments: Analysis and estimation of distributions using linear combinations of order statistics. J. R. Stat. Soc. Ser. B 1990, 52, 105–124. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Contingency ID Description | Probability | ICT Failure/Stuck Breaker | Action |
|---|---|---|---|
| Busbar fault with correct operation of all CBs and BDP | psb/2 × [Пj(1 − pCBj)] × (1 − pK) × [Пj(1 − p_bdpj)] × (1 − p_bdpK) × (1 − pBDP) | NO | Intervention of BDP |
| Busbar fault with malfunction of one signal to a CB | psb/2 × p_bdpj × (1 − pCBj) × (1 − pBDP) for any j | YES, missing signal to a CB | Intervention of BDP and breaker failure device on one CB |
| Busbar fault with one stuck breaker | psb/2 × pCBj × (1 − pBDP) for any j | YES, one CB stuck | Intervention of BDP and back up protection for one CB |
| Busbar fault with missing signal to K | psb/2 × (1 − pK) × p_bdpK × (1 − pBDP) for any half-busbar | YES, missing signal to K | Intervention of BDP for faulty half-busbar + back-up protections for components of safe half-busbar |
| Busbar fault with stuck K | psb/2 × pK × (1 − pBDP) for any half-busbar | YES, stuck K | Intervention of BDP for faulty half-busbar + breaker failure device for components of safe half-busbar |
| Busbar fault with BDP out of service | psb/2 × pBDP for any half-busbar | YES, BDP out of service | Intervention of all backup protections for all components at two half-busbars |
| Line fault | pl × (1 − pCBj) × (1 − p_dsj) | NO | Opening of faulty line with distance protections + telepiloting |
| Transfo fault | ptr2 × (1 − pCBj) × (1 − p_ptj) | NO | Opening of faulty transformer with overcurrent/differential protections |
| Line fault with stuck breaker | plj × pCBj for any line j | YES, stuck breaker | Intervention of breaker failure device for all safe CBs and backup protection intervention for faulty CB |
| Line fault with missing tripping signal from distance protection (telepiloting) | plj × (1 − pCBj) ×p_dsj for any line j | YES, missing signal | Intervention of back-up protections for components of the whole substation connected the faulty component |
| transfo fault with stuck breaker | ptr2j × pCBj for any transfo j | YES, stuck breaker | Intervention of breaker failure device for all safe CBs and backup protection intervention for faulty CB |
| transfo fault with missing signal from overcurrent/differential protection | ptr2j × (1 − pCBj) × p_ptj for any transfo j | YES, missing signal | Intervention of back-up protections for components of the whole substation connected the faulty component |
| RES Type | Total Rating [MW] | Number of Devices | Equivalent Area Diameter [km] | Std Dev of Forecast Error *, % of Rated Power | Mean Value of Forecast Error *, % of Rated Power |
|---|---|---|---|---|---|
| Wind Farms | 125 | 63 | 30 | 15 | 0 |
| Solar Farms | 12 | 240 | 30 | 25 | 0 |
| ID | Description | Application | Goal |
|---|---|---|---|
| 1 | RB-DSA applied to a set of contingencies due to a storm threat affecting West side of the system | on-line operation | Contingency ranking by dynamic indicators |
| 2 | System with stochastic RES power injections and load absorptions—time horizon = 24 h, distance among WF’s = 20 km | Operational planning | Quantifying the effect of forecast uncertainties |
| Contingency ID | Impact | Prob. | Risk |
|---|---|---|---|
| N-1_BLLP211_CRCP211 | 0.1623 | 5.53 × 10−5 | 3.41 × 10−4 |
| N-1_BLLP211_CRCP211 | 0.1623 | 5.53 × 10−5 | 3.41 × 10−4 |
| N-1_CMRP211_PRRP211 | 0.1632 | 4.81 × 10−5 | 2.95 × 10−4 |
| N-1_CMRP211_PRRP211 | 0.1632 | 4.81 × 10−5 | 2.95 × 10−4 |
| N-1_CRCP211_CORP211 | 0.1596 | 4.48 × 10−5 | 2.81 × 10−4 |
| N-1_CRCP211_CORP211 | 0.1596 | 4.48 × 10−5 | 2.81 × 10−4 |
| SSB1_CMRP211 | 0.1754 | 1.51 × 10-5 | 8.58 × 10−5 |
| SSB2_CMRP211 | 0.1741 | 1.49 × 10−5 | 8.58 × 10−5 |
| N-2_Ln_BLLP211-CRCP211_Ln_BLLP211-CRCP211 | 0.1625 | 2.13 × 10−6 | 1.31 × 10−5 |
| N-2_Ln_CMRP211-PRRP211_Ln_CMRP211-PRRP211 | 0.1633 | 1.75 × 10−6 | 1.07 × 10−5 |
| N-2_Ln_CRCP211-CORP211_Ln_CRCP211-CORP211 | 0.1599 | 1.60 × 10−6 | 1.00 × 10−5 |
| SSB2_CRCP211_stuckCB_FAULT_ON_L_PP2211 | 1.097 | 4.83 × 10−8 | 4.41 × 10−8 |
| SSB1_BLLP211_stuckCB_FAULT_ON_L_PP2211 | 1.07 | 4.72 × 10−8 | 4.41 × 10−8 |
| SSB2_BLLP211_stuckCB_FAULT_ON_L_PP2212 | 1.061 | 4.67 × 10−8 | 4.41 × 10−8 |
| SSB2_CRCP211_stuckCB_FAULT_ON_L_PP2210 | 1.078 | 3.92 × 10−8 | 3.63 × 10−8 |
| SSB1_CORP211_no_signal_to_one_CB | 9.475 | 2.66 × 10−8 | 2.81 × 10−9 |
| SSB2_CRCP211_stuckCB_FAULT_ON_L_PP2248 | 1.097 | 1.75 × 10−8 | 1.60 × 10−8 |
| SSB1_CMRP211_stuckCB_FAULT_ON_L_PP2248 | 1.095 | 1.75 × 10−8 | 1.60 × 10−8 |
| SSB2_CMRP211_stuckCB_FAULT_ON_L_PP2249 | 1.09 | 1.74 × 10−8 | 1.60 × 10−8 |
| N-2_Ln_BLLP211-CRCP211_Ln_CMRP211-PRRP211 | 0.1625 | 1.64 × 10−8 | 1.01 × 10−7 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ciapessoni, E.; Cirio, D.; Massucco, S.; Morini, A.; Pitto, A.; Silvestro, F. Risk-Based Dynamic Security Assessment for Power System Operation and Operational Planning. Energies 2017, 10, 475. https://doi.org/10.3390/en10040475
Ciapessoni E, Cirio D, Massucco S, Morini A, Pitto A, Silvestro F. Risk-Based Dynamic Security Assessment for Power System Operation and Operational Planning. Energies. 2017; 10(4):475. https://doi.org/10.3390/en10040475
Chicago/Turabian StyleCiapessoni, Emanuele, Diego Cirio, Stefano Massucco, Andrea Morini, Andrea Pitto, and Federico Silvestro. 2017. "Risk-Based Dynamic Security Assessment for Power System Operation and Operational Planning" Energies 10, no. 4: 475. https://doi.org/10.3390/en10040475
APA StyleCiapessoni, E., Cirio, D., Massucco, S., Morini, A., Pitto, A., & Silvestro, F. (2017). Risk-Based Dynamic Security Assessment for Power System Operation and Operational Planning. Energies, 10(4), 475. https://doi.org/10.3390/en10040475