1. Introduction
For the past few decades, the optimal power flow (OPF) problem has played an essential role in studying the economy terms of power systems [
1,
2]. The OPF problem is a nonlinear, nonconvex, large-scale, and static programming problem [
3] that optimizes selected objective functions while satisfying a set of equality and inequality constraints. The power balance equations are the equality constraints, and the limits of state and control variables are the inequality constraints of the OPF problem. The state variables consist of slack bus active power generation, load bus voltages, reactive power generation, and apparent power flow. The control variables involve active power generation except at slack bus, generator bus voltages, tap ratios of transformers, and reactive powers of shunt compensation capacitors. In recent years, because of the rise in fuel cost, which increases generation cost, fuel cost has become the objective function to be optimized in the OPF problem. Moreover, due to the release of emissions from thermal power plants into the atmosphere, emissions are yet another concern for power system operation and planning [
4]. At the same time, because the demand for electricity has outpaced the expansion of transmission capacity, the inadequate reactive power sources of power systems have increased losses in transmission lines. Thus, emissions and transmission losses must also be considered as part of the objective functions of the OPF problem.
To solve the OPF problem, several traditional optimization techniques, such as nonlinear programming [
5], quadratic programming [
6], and the interior point method [
7], have been successfully applied. However, these algorithms’ nonlinear characteristics make them impractical to use in practical systems. The nonlinear characteristics may cause the obtained solutions to be trapped in local optima, and these algorithms require an enormous amount of computational effort and time. Therefore, many optimization methods need to be improved to overcome these shortcomings [
8,
9]. Recently, several population-based optimization algorithms, including the OPF problem, have been employed to solve a complex constrained optimization problem in the field of power systems. Some of the other proposed techniques include the genetic algorithm (GA) [
10], tabu search (TS) [
11], differential evolution (DE) [
12], evolutionary programming (EP) [
13], probabilistic optimal power-flow (P-OPF) [
14], preventive security-constrained power flow optimization [
15], ant colony optimization (ACO) [
16], grey wolf optimizer (GWO) [
17], artificial bee colony (ABC) [
18], particle swarm optimization (PSO) [
19], and the dragonfly algorithm (DA) [
20]. Even with the successful optimization of single-objective population-based optimization techniques, minimizing only one objective function is not sufficient in the power system because there are many problems, such as fuel cost, emissions, and transmission losses, which also need to be minimized. Consequently, many objective functions should be considered because this is a multi objective optimization problem. Since there are three independent objective functions in this study (i.e., fuel cost, emissions, and transmission losses), the number of incompatible optimal solutions between the objective functions is infinite, and these optimal solutions are called Pareto optimal solutions [
21].
Several optimization algorithms have been proposed and applied to solve the multiobjective OPF (MO-OPF) problem by many researchers. One of these methods was carried out by converting the multiobjective problem into a single-objective problem and then solving the problem by using a single-objective optimizer. However, this method has some drawbacks, such as the limitation of the available choices, the need for weights for each objective, and the requirement of multiple optimizer runs. To overcome these weaknesses, many researchers have proposed multiobjective evolutionary algorithms, such as the improved strength Pareto evolutionary algorithm (ISPEA2) [
22], hybrid modified particle swarm optimization-shuffle frog leaping algorithms (HMPSO-SFLA) [
23], modified teaching–learning-based optimization (MTLBO) [
24], GWO [
17], DE [
17], multiobjective modified imperialist competitive algorithm (MOMICA) [
25], differential search algorithm (DSA) [
26], modified shuffle frog leaping algorithm (MSFLA) [
27], modified Gaussian bare-bones multiobjective imperialist competitive algorithm (MGBICA) [
28], multiobjective harmony search (MOHS) [
29], adaptive real coded biogeography-based optimization (ARCBBO) [
30], multiobjective differential evolution algorithm (MO-DEA) [
31], hybrid modified imperialist competitive algorithm and teaching–learning algorithm (MICA-TLA) [
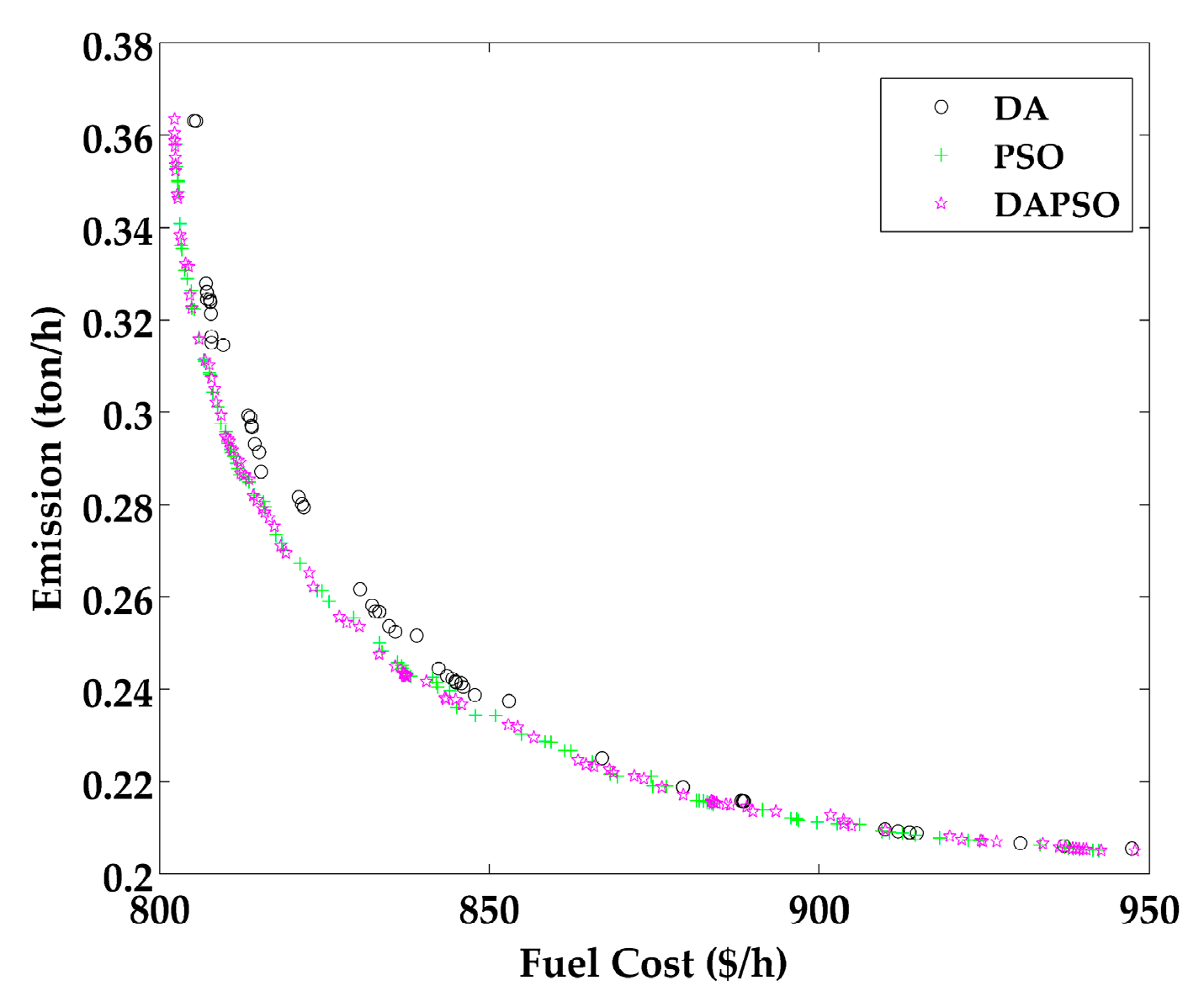
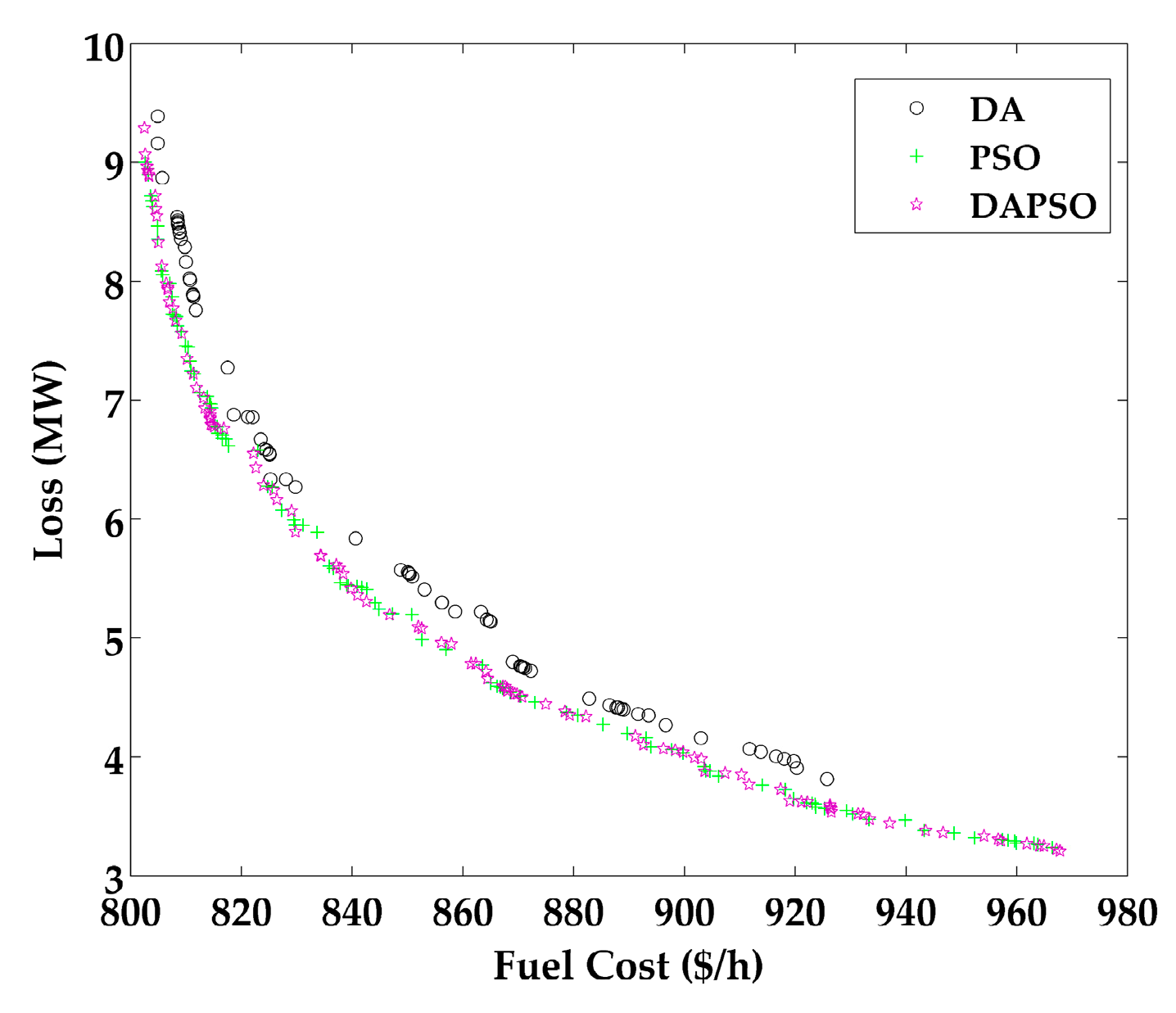
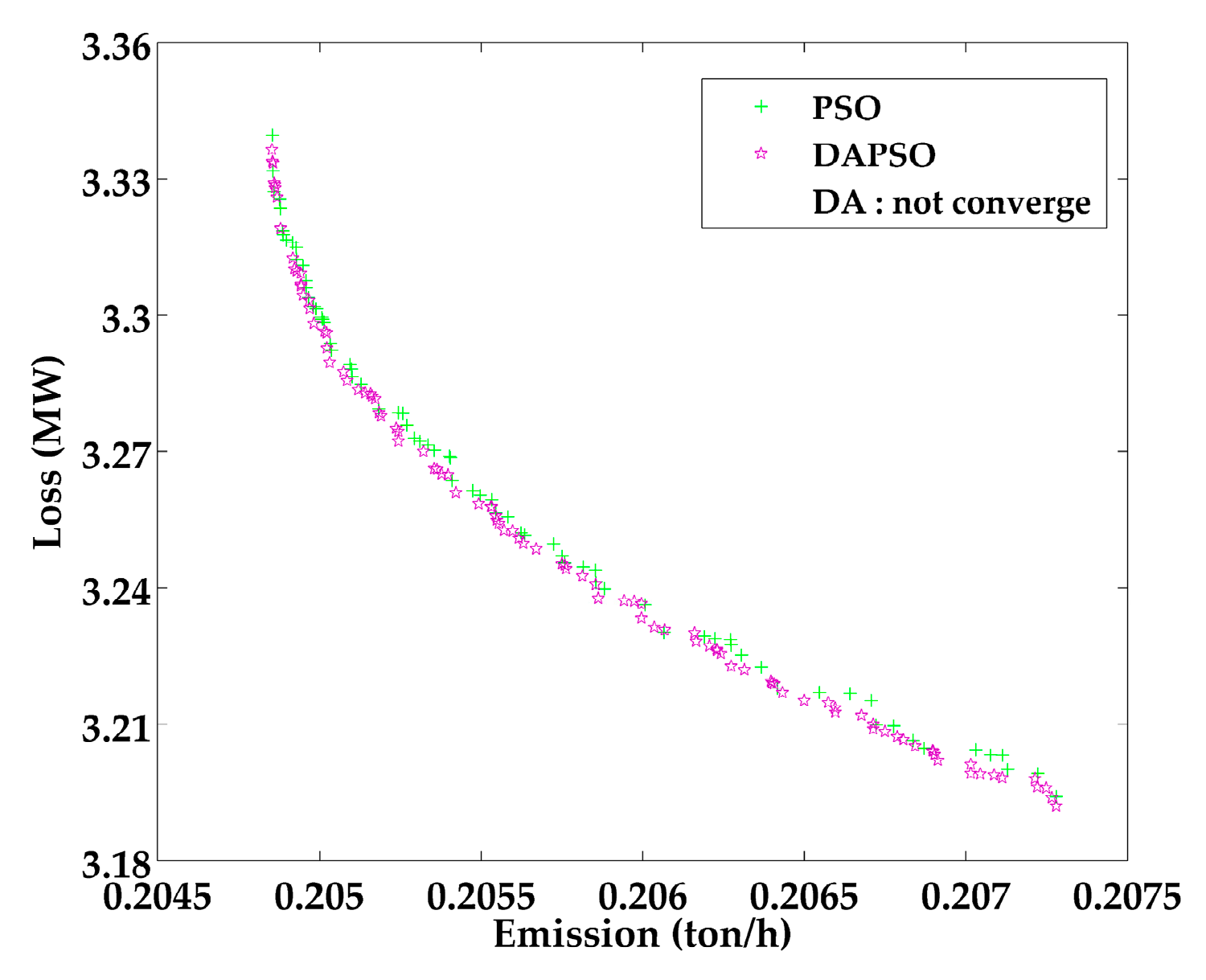
32], etc., to successfully solve the OPF problem. In the past few decades, various well-proposed multiobjective evolutionary algorithms have been successfully applied and improved in many applications; however, most of them have not been extensively investigated in the OPF problem. Moreover, improving the search performance of the multiobjective evolutionary algorithm for solving the OPF problem is also important. In this paper, a hybrid DA-PSO algorithm is proposed to deal with the MO-OPF problem. The concept of the hybrid algorithm is the combination of the exploration and exploitation phases of the DA and PSO algorithms, respectively. The performance of the proposed algorithm was evaluated on the standard IEEE 30-bus and IEEE 57-bus power systems. Three different objective functions—fuel cost, emissions, and transmission losses—were individually and simultaneously considered as parts of the objective function in the OPF problem. The obtained results were compared with other evolutionary algorithms and the traditional DA and PSO.
The rest of the article is classified into five sections as follows.
Section 2 introduces the formulation and constraints of the multiobjective optimization. In
Section 3, the traditional DA and PSO are explained, and
Section 4 depicts the concept of the proposed algorithm.
Section 5 presents the optimization results and the comparisons between the solutions from the proposed algorithm and the solution from other algorithms based on IEEE 30-bus and IEEE 57-bus systems. Finally, in
Section 6, the conclusions of the simulation results of the proposed algorithm are described.
2. Problem Formulation and Constraints for Multi Objective Optimization for OPF
Multi-objective optimization is a model that optimizes more than one objective function to find optimal control variables while simultaneously satisfying equality and inequality constraints. The compromised solutions, nondominated solutions, which have more than one optimal solution between each objective, are the optimal solutions referred to as the Pareto front. The multiobjective problem is mathematically formulated as follows:
subject to
where
f is a vector of objective functions to be optimized,
Nobj is the number of objective functions,
g(
x,
u) are the equality constraints, and
h(
x,
u) are the inequality constraints.
x is a vector of state variables including slack bus active power, load bus voltages, generator reactive powers, and apparent power flows, expressed as follows:
where
Pgslack is the active power generation at slack bus,
VLi is the load voltage at bus
i,
NL is number of load buses,
Qgi is the reactive power generation at bus
i,
Ngen is the number of total generators,
Sli is the apparent power flow at branch
i, and
Nl is the number of transmission lines.
u is a vector of control variables consisting of active power generations except at slack bus, generator bus voltages, transformer tap ratios, and reactive powers of shunt compensation capacitors, expressed as:
where
Pgi is the active power generation at bus
i,
PVbus is the set of generator buses except at slack bus,
Vgi is the generator bus voltage at bus
i,
Ti is the transformer tap ratio at bus
i,
Ntran is the number of transformer taps,
Qci is the shunt compensation capacitor at bus
i, and
Ncap is the number of compensation capacitors.
2.1. Objective Functions
In this study, the objective functions of the OPF, consisting of fuel cost, emissions, and transmission line losses, are considered as shown below.
2.1.1. Fuel Cost
The total fuel cost of the generators is considered to be minimized and is given as follows:
where
fC is the total fuel cost of generators function (
$/h), and
ai,
bi and
ci are the fuel cost coefficients of the
ith generator units.
2.1.2. Emissions
The emissions function can be represented as the sum of all considered emission types, such as sulphur oxides (SO
x), nitrogen oxides (NO
x), thermal emission, etc. However, in the present study, two important emission types, NO
x and SO
x, are taken into account, as expressed below:
where
fE is the total emission generations function (ton/h), and
γi,
βi,
αi,
ζi and
λi are emission coefficients of the
ith generator units.
2.1.3. Transmission Line Losses
The system active power loss in the transmission line is formulated as follows:
where
fL is the total transmission loss function (MW),
gk is the conductance of the
kth line,
Vi is the voltage at bus
i,
Vj is the voltage at bus
j, and
θij is the voltage phase angle difference between buses
i and
j.
2.2. Constraints
2.2.1. Equality Constraints
The OPF equality constraints are the active and reactive power balance constraints, as follows:
where
Pdi is the active power demand at bus
i,
Nbus is the number of buses,
Gij is the transfer conductance between buses
i and
j,
Bij is the transfer susceptance between buses
i and
j, and
Qdi is the reactive power demand at bus
i.
2.2.2. Inequality Constraints
where
Pgimin and
Pgimax are the minimum and maximum active power generations at bus
i, respectively,
Qgimin and
Qgimax are the minimum and maximum reactive power generations at bus
i, respectively,
Vgimin,
Vgimax are the minimum and maximum generator voltage at bus
i, respectively,
Slimax is the maximum apparent power flow at branch
i,
VLimin,
VLimax are the minimum and maximum load voltage at bus
i, respectively,
Qcimin and
Qcimax are the minimum and maximum shunt compensation capacitor at bus
i, respectively,
Timin,
Timax are the minimum and maximum transformer tap-ratio at bus
i, respectively.
2.2.3. Constraints Handling
The inequality of dependent variables, including slack bus active power generation, load bus voltage magnitudes, reactive power generations, and apparent power flows, are integrated into the penalized objective function to maintain these variables within their limits and to refuse infeasible solutions. The penalty function can be expressed as follows [
27]:
where
J(
x,
u) is the penalized objective function,
Kp,
KQ,
KV and
Ks are the penalty factors, and
xlim is the limit value of the dependent variables, determined as follows:
4. Proposed Hybrid DA-PSO Optimization Algorithm for MO-OPF Problem
Many optimization algorithms have been proposed to overcome the optimization problem of being trapped in the local optima while the algorithms try to find the best solution. PSO has been proven in several works from the literature to find the optimal solution in various problems [
35,
36,
37,
38]. Because of its equations in finding the optimal solution by using the best experience of the particles, PSO could quickly converge on the optimal solution, i.e., it is good at exploitation. However, PSO is sometimes still trapped in the local optima because it converges on the optimal solution too quickly. In other words, PSO is poor at exploration, which is an important task of the optimization process. In DA, it applies the Levy flight to improve the randomness and stochastic behavior when there is no neighboring dragonfly. This could significantly improve the exploration process of the algorithm. However, the best experience, which is the personal best, of dragonflies is not applied during the operation. This causes the DA to converge on the optimal solution very slowly and can sometimes cause it to be trapped in the local optima. To overcome these problems, a new algorithm is proposed which combines the prominent points of the DA and PSO algorithms, which are the exploration of DA and the exploitation of PSO. At first, the dragonflies in DA are initialized to explore the search space to find the area of the global solution. Then, the best position of DA is obtained. The obtained best position from DA is then substituted as the global best position in the PSO equation (Equation (31)). After that, the PSO algorithm, which is the exploitation phase, operates by using the global best position from DA, allowing it to provide the expected optimal solution. The velocity and position equations of PSO can be modified as follows:
where
is the best position obtained from DA at iteration
t + 1.
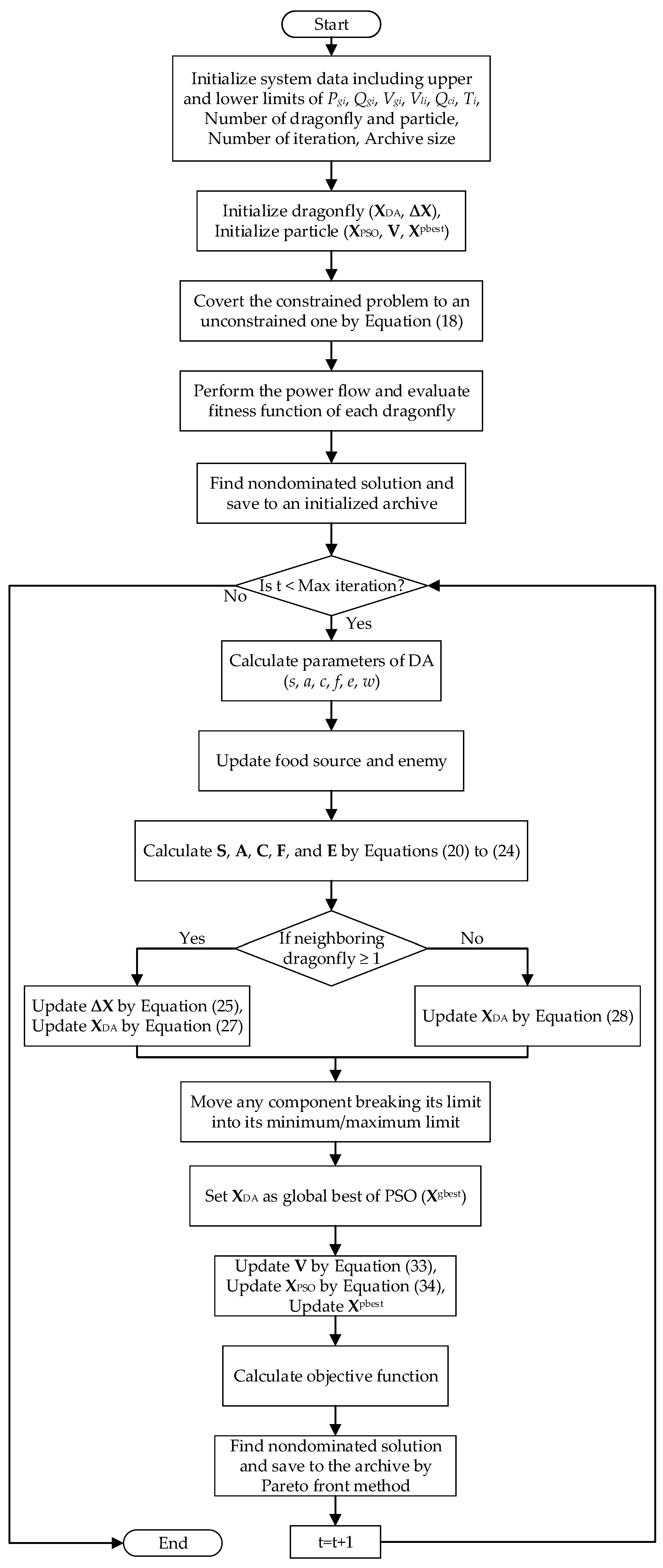
The application of the proposed DA-PSO algorithm for solving the MO-OPF problem can be described as follows:
- Step 1.
Clarify the system data comprising the fuel cost coefficients of the generators, emission coefficients of the generators, initial values of generator active powers, initial values of generator bus voltages, initial values of transformer tap ratios, initial values of shunt compensation capacitors, upper limit of Sli, lower and upper limits of Pgi, Qgi, Vgi, VLi, Qci, and Ti, the parameters of DA and PSO, the number of dragonflies and particles, the number of iterations, and the archive size.
- Step 2.
Generate the initial population of dragonflies and particles.
- Step 3.
Convert the constrained multi objective problem to an unconstrained one by using Equation (18).
- Step 4.
Perform the power flow and calculate the objective functions for the initial population of dragonflies.
- Step 5.
Find the nondominated solutions and save them to the initial archive.
- Step 6.
Set the fitness value of the initial population as the food source.
- Step 7.
Calculate the parameters of DA (s, a, c, f, and e).
- Step 8.
Update the food source and enemy of DA.
- Step 9.
Calculate the S, A, C, F, and E by Equations (20)–(24).
- Step 10.
Check if a dragonfly has at least one neighboring dragonfly, then update step vector (ΔX) and the position of dragonfly (XDA) by Equations (25) and (27), respectively, and if each dragonfly has no neighboring dragonfly, then update XDA by Equation (28) and set ΔX to be zero.
- Step 11.
If any component of each population breaks its limit, then ΔX or XDA of that population is moved into its minimum/maximum limit.
- Step 12.
Set the best position obtained from DA as the global best of PSO (Xgbest).
- Step 13.
Update the velocity of the particle (V) and the position of the particle (XPSO) by Equations (33) and (34), respectively.
- Step 14.
If any component of each population breaks its limit, then V or XPSO of that population is moved into its minimum/maximum limit.
- Step 15.
Calculate the objective functions of the new produced population.
- Step 16.
Employ the Pareto front method to save the nondominated solutions to the archive and update the archive.
- Step 17.
If the maximum number of iterations is reached, the algorithm is stopped; otherwise, go to step 7.
The flowchart of the DA-PSO algorithm for the MO-OPF problem is shown in
Figure 1.

 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}