Active Control and Validation of the Electric Vehicle Powertrain System Using the Vehicle Cluster Environment



Abstract
:1. Introduction
2. Vehicle Power Demand Forecast Based on the Vehicle Cluster Environment
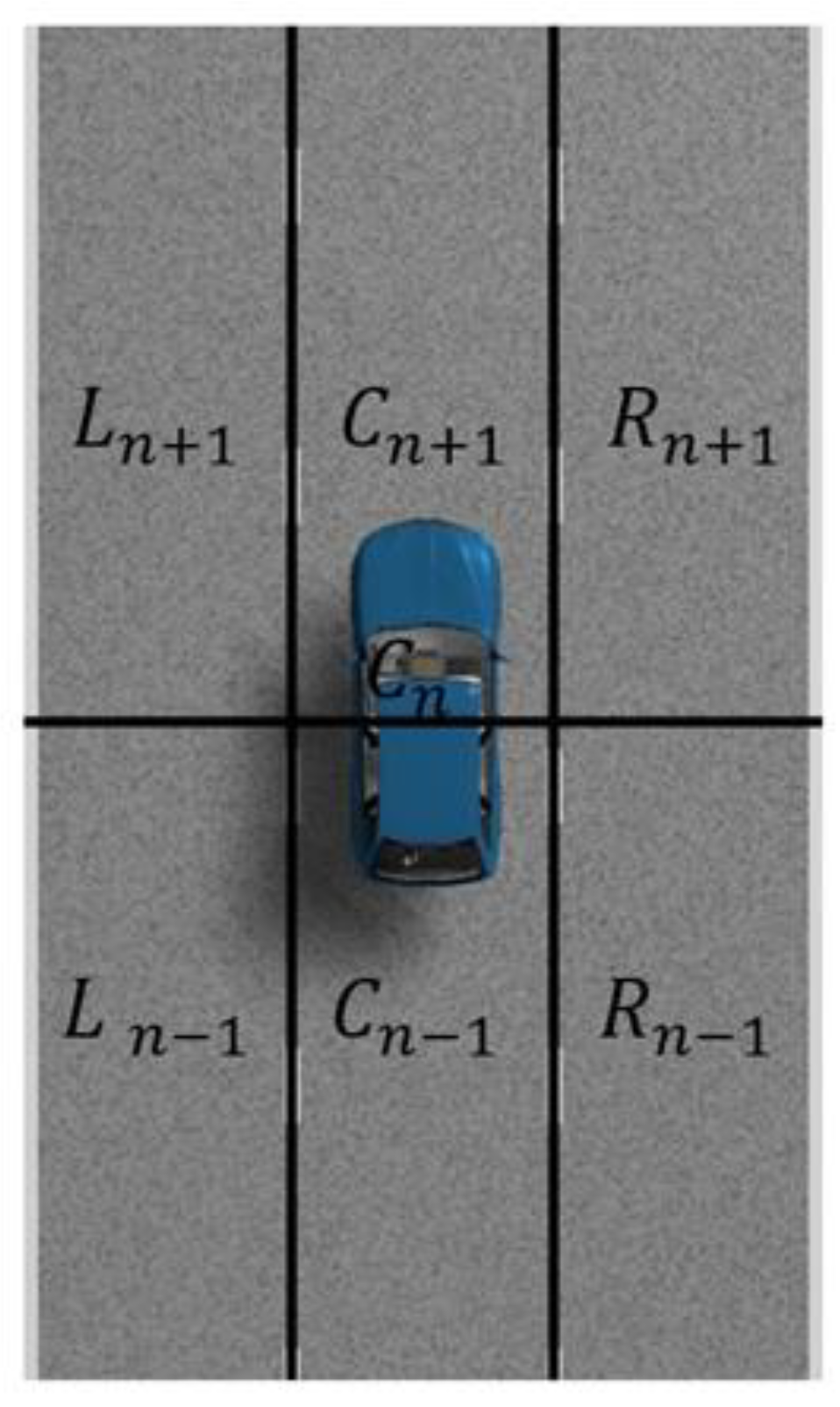
2.1. Vehicle Cluster Environment Analysis
2.2. Vehicle Power Demand Forecasting Algorithm in the Vehicle Cluster Environment
3. Vehicle Model
3.1. Vehicle Parameters
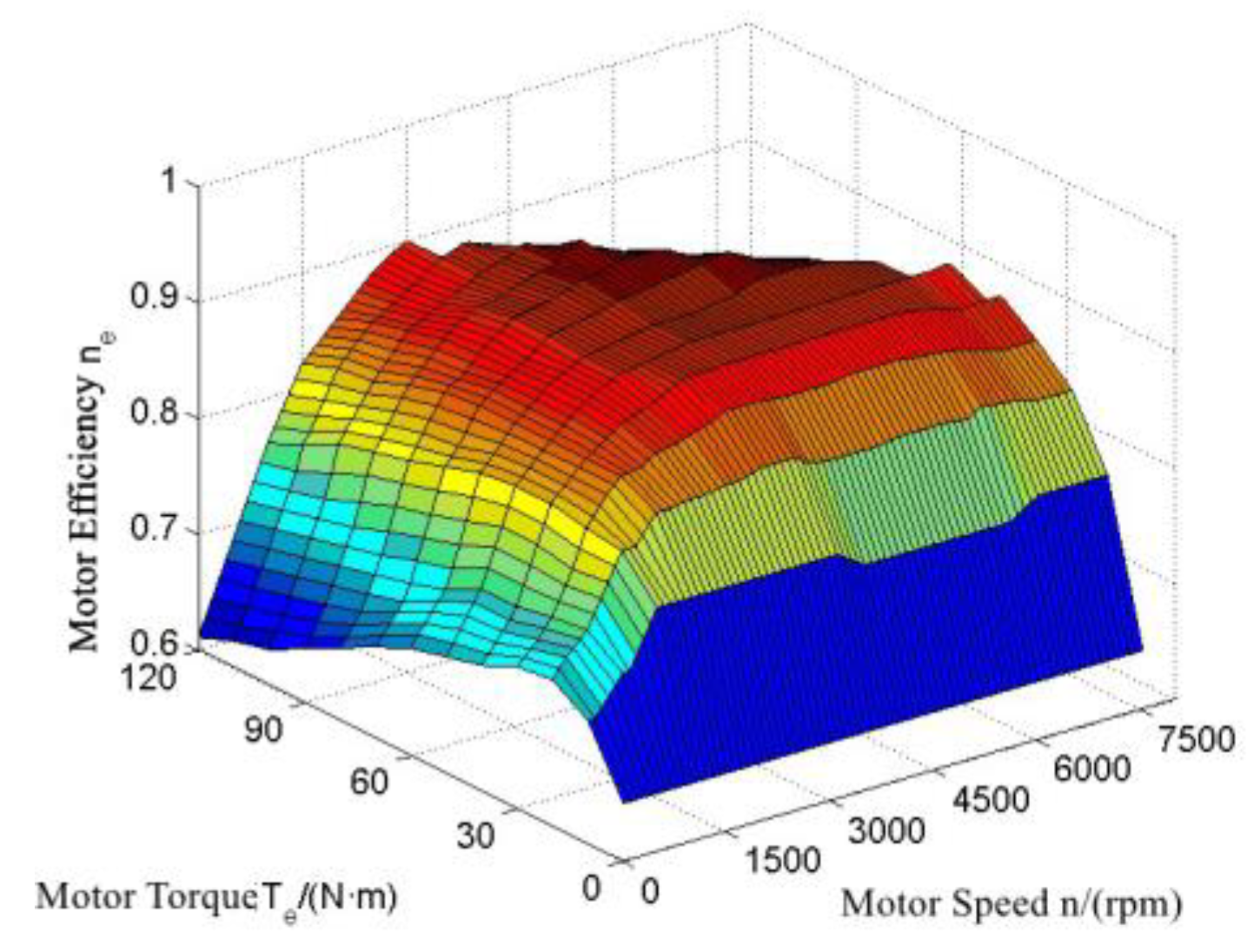
3.2. Motor Efficiency Model
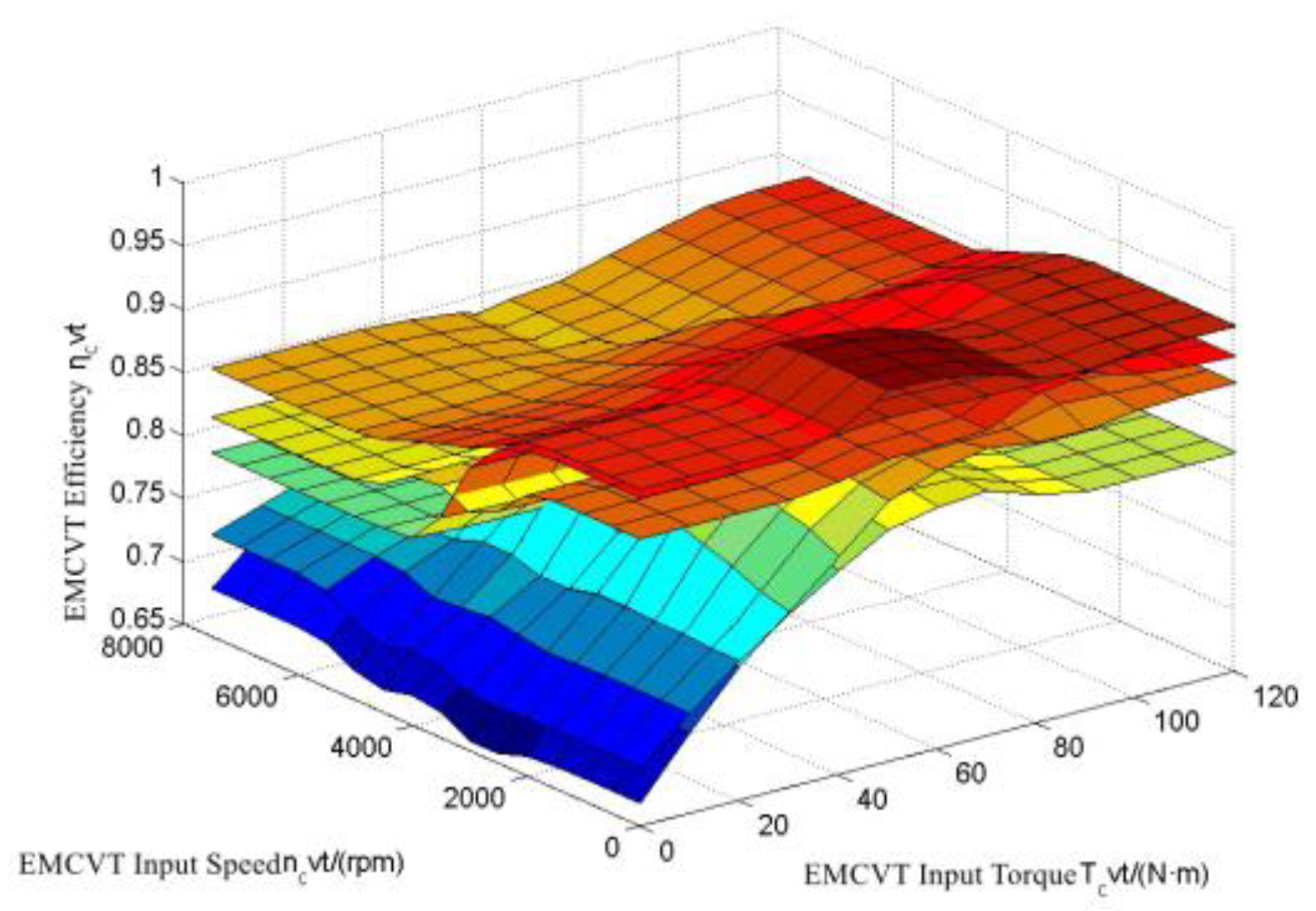
3.3. EMCVT Efficiency Model
4. Research on the Active Control Strategy of the Powertrain System
4.1. Optimal Working Point Calculation for the Vehicle Powertrain System
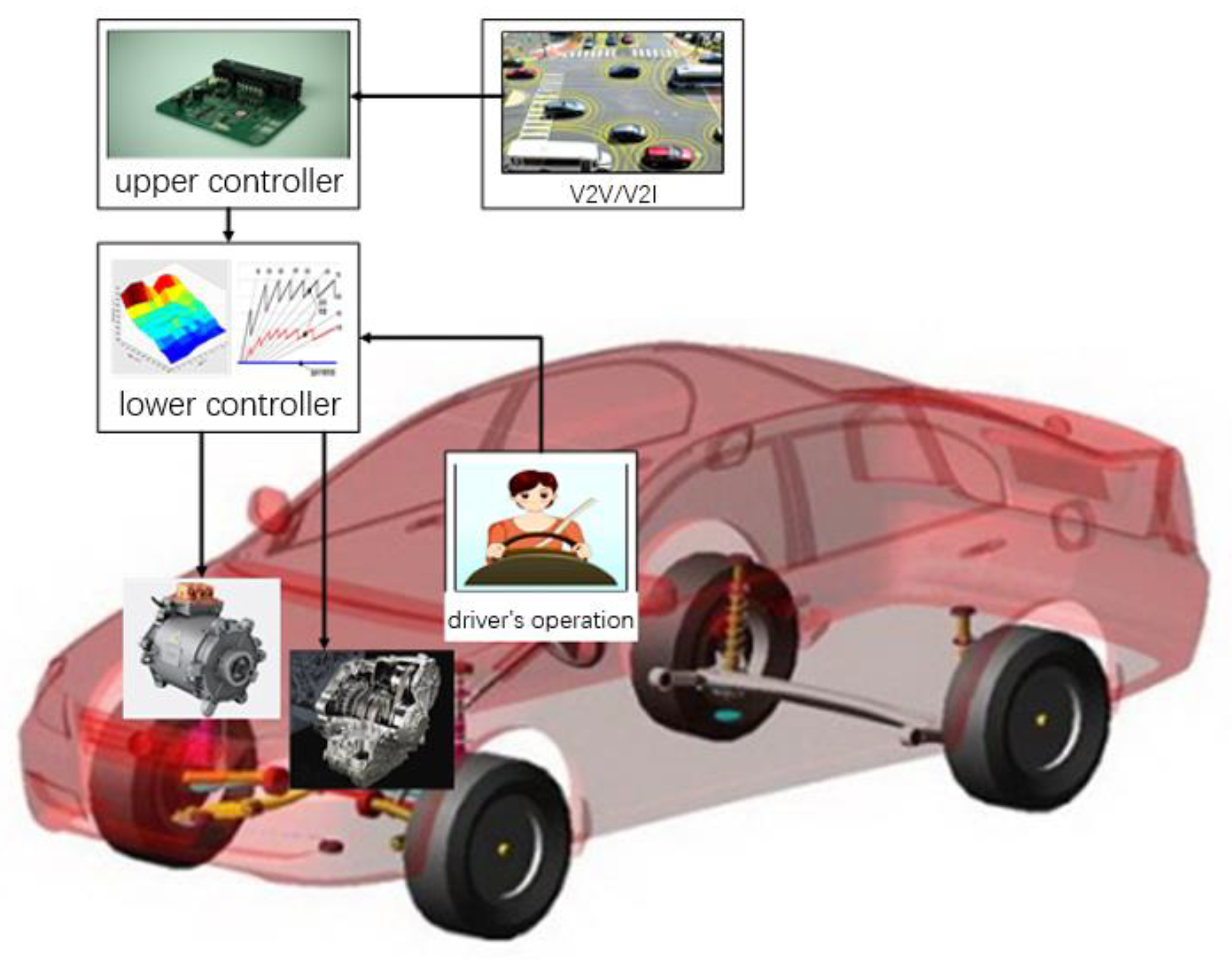
4.2. Vehicle Powertrain System Active Control Strategy
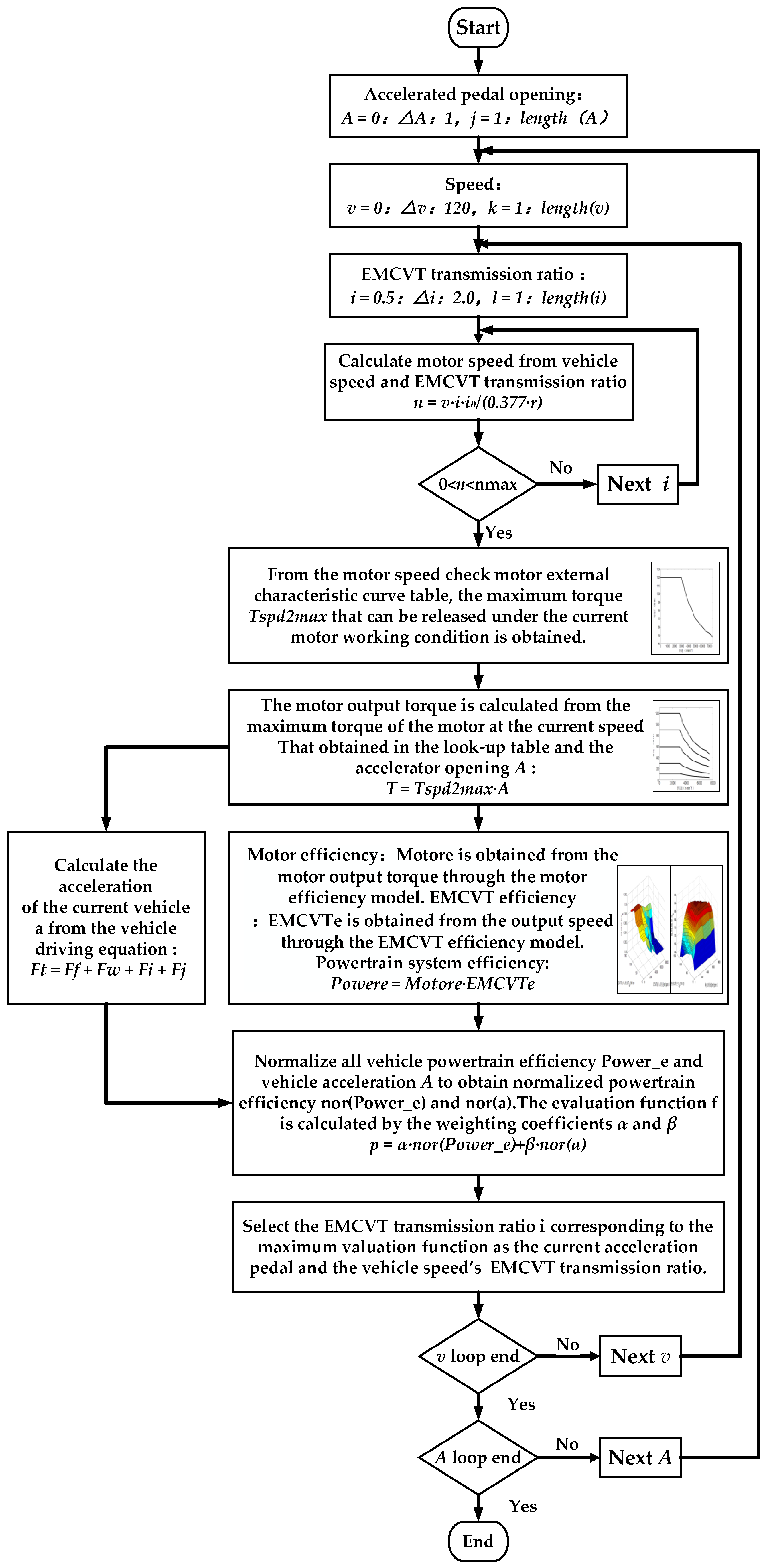
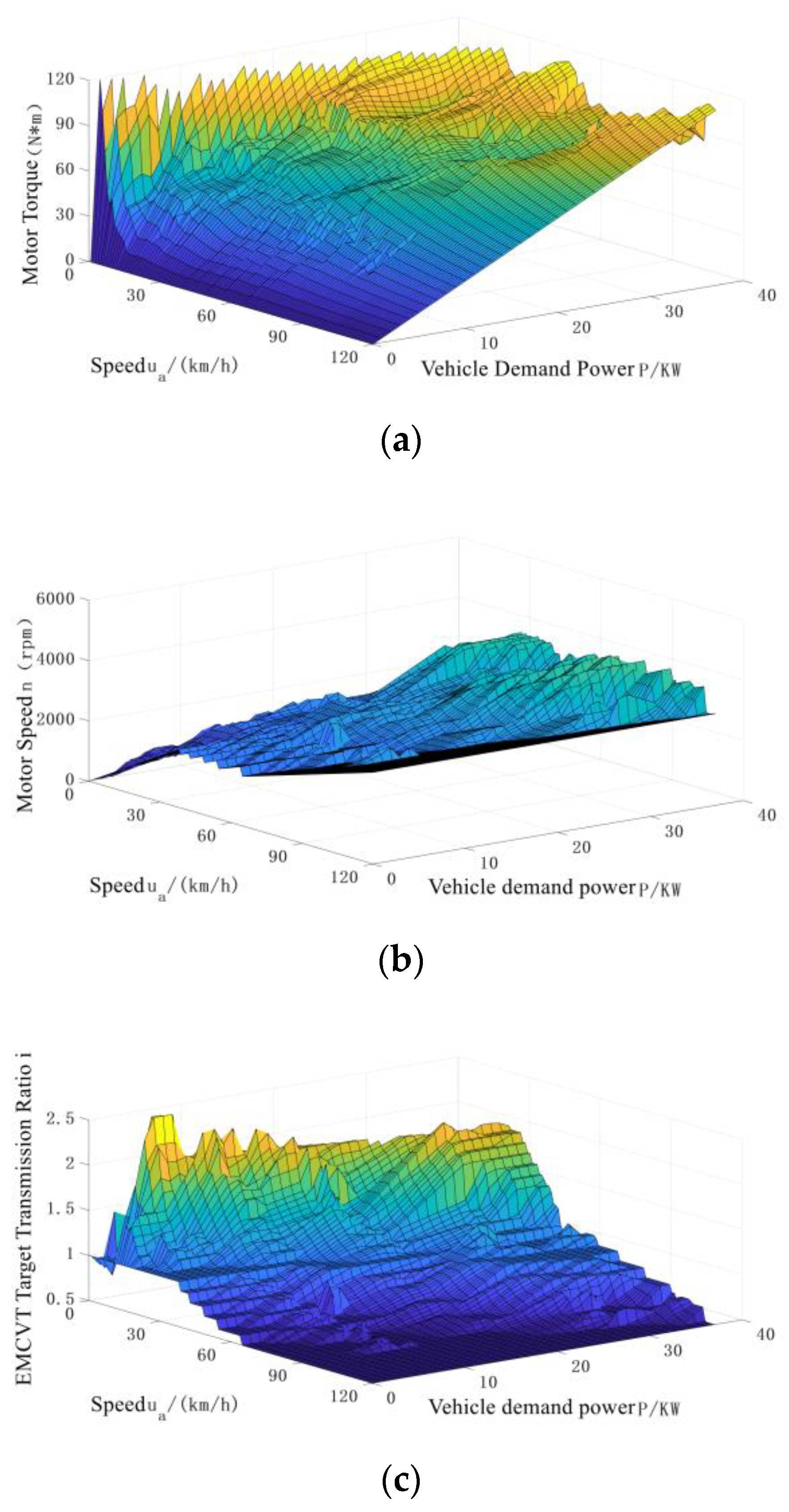
4.2.1. EMCVT Target Transmission Ratio Solving Model
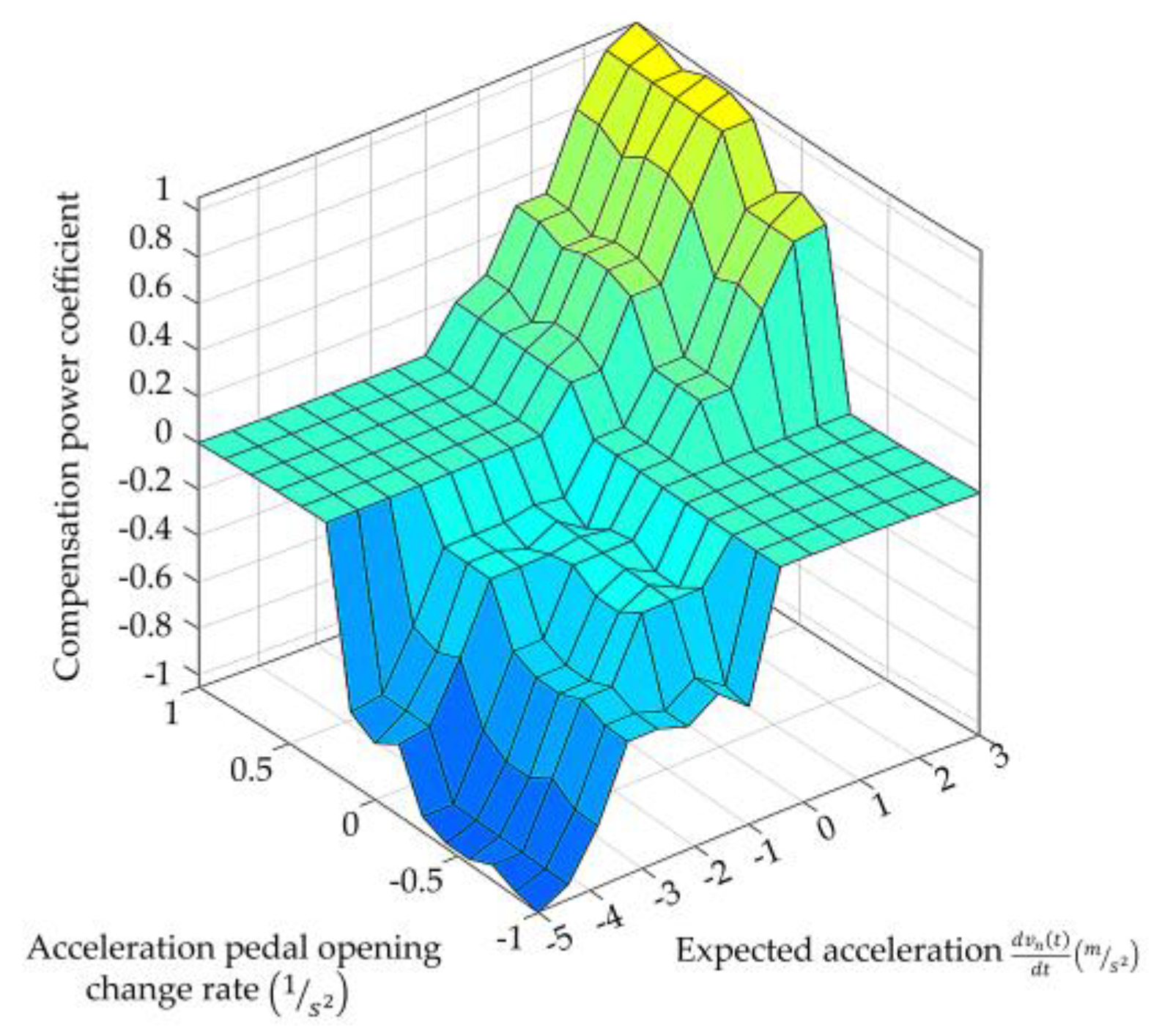
4.2.2. Motor Torque Compensation
4.2.3. Vehicle Torque Control System Passive Control Target Torque Calculation
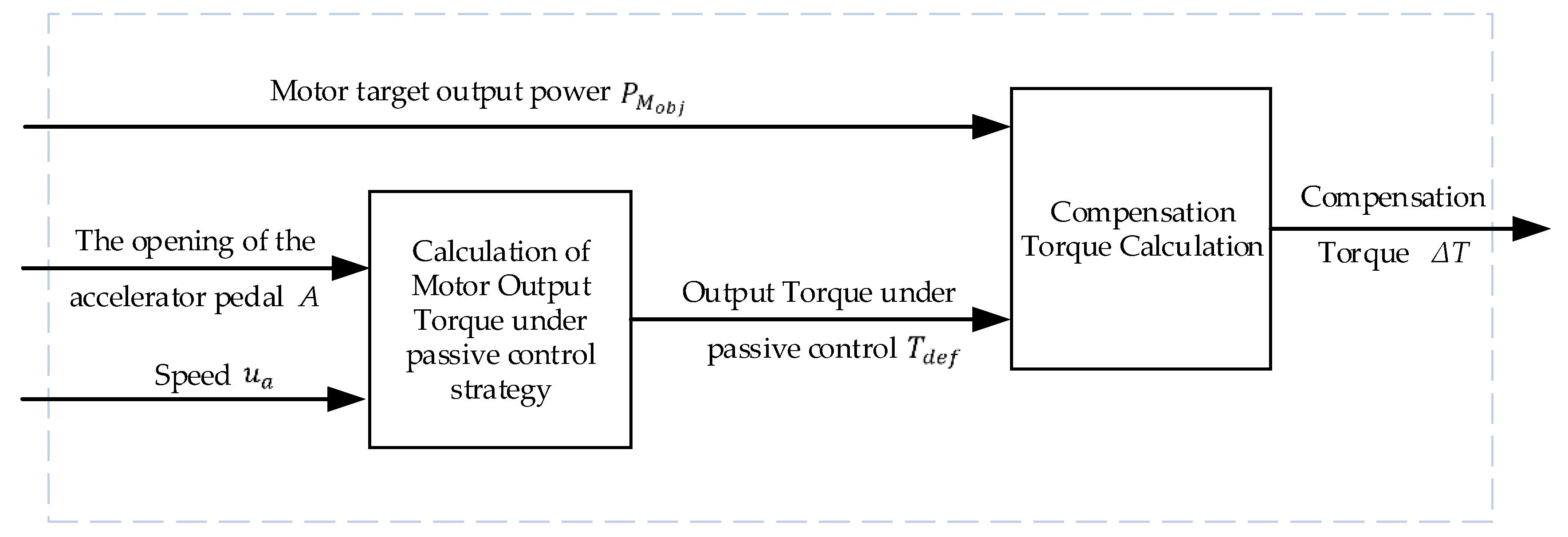
4.2.4. Compensation Torque Calculation
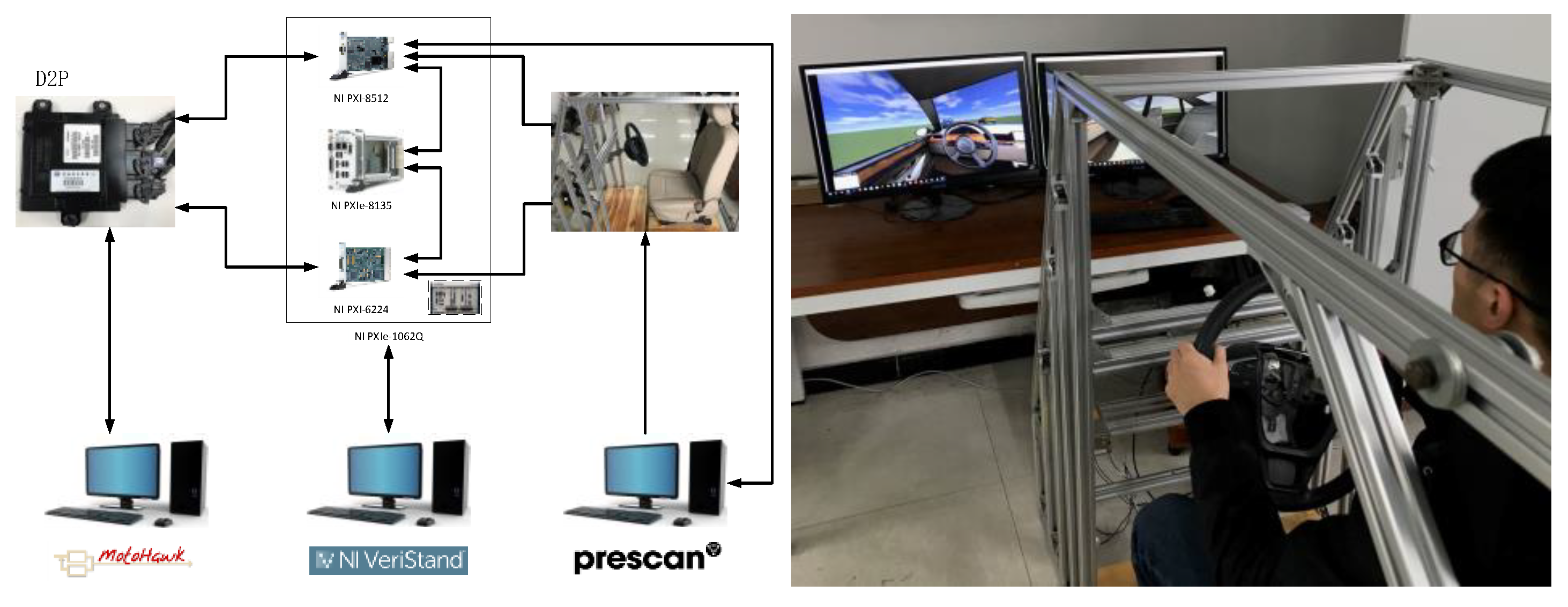
5. Test Environment Construction and Test Examples
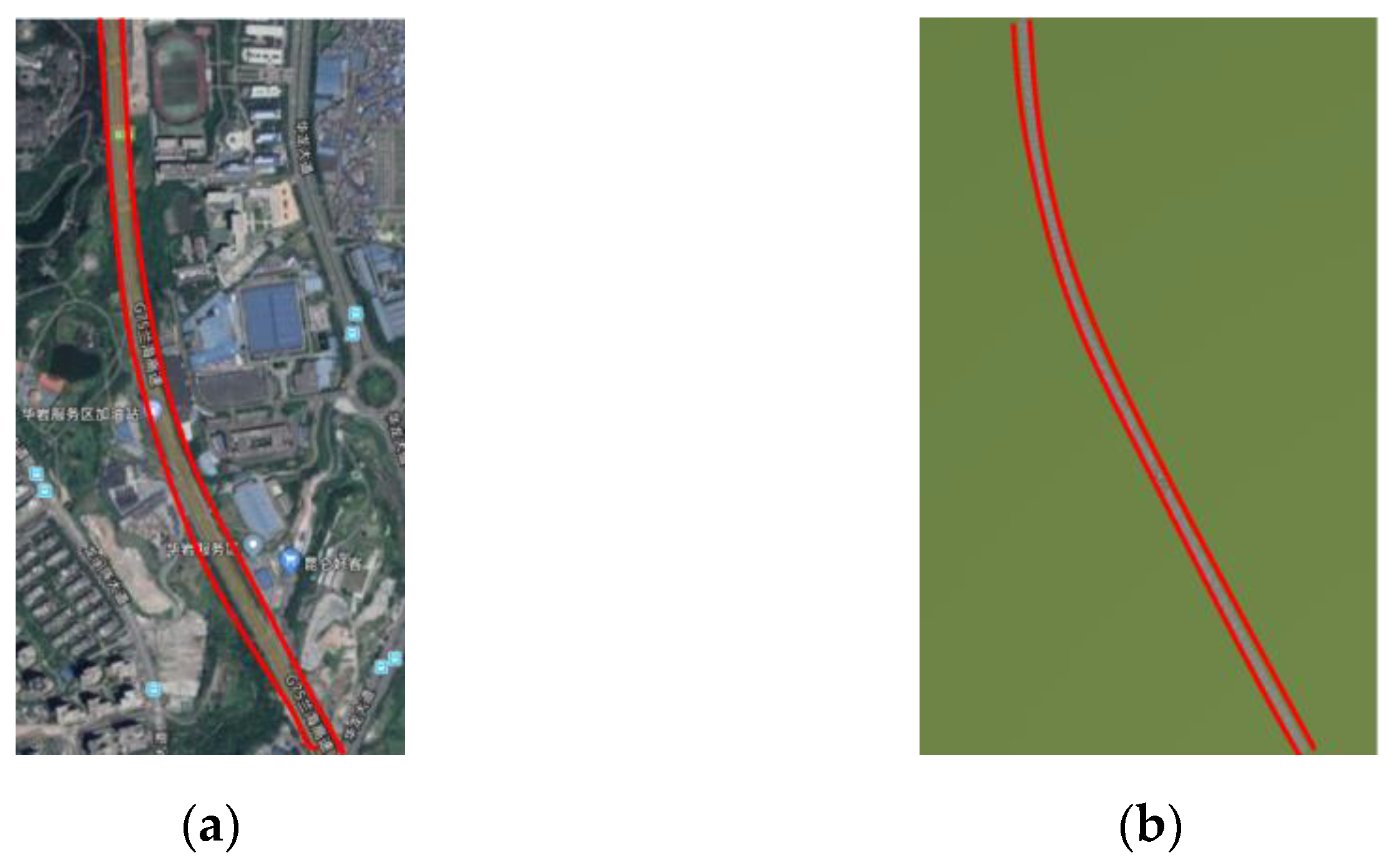
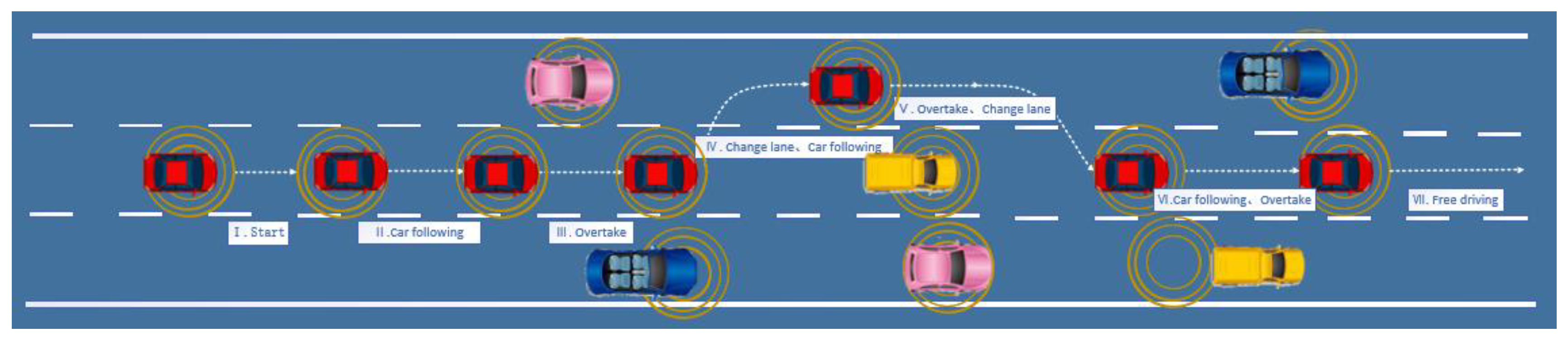
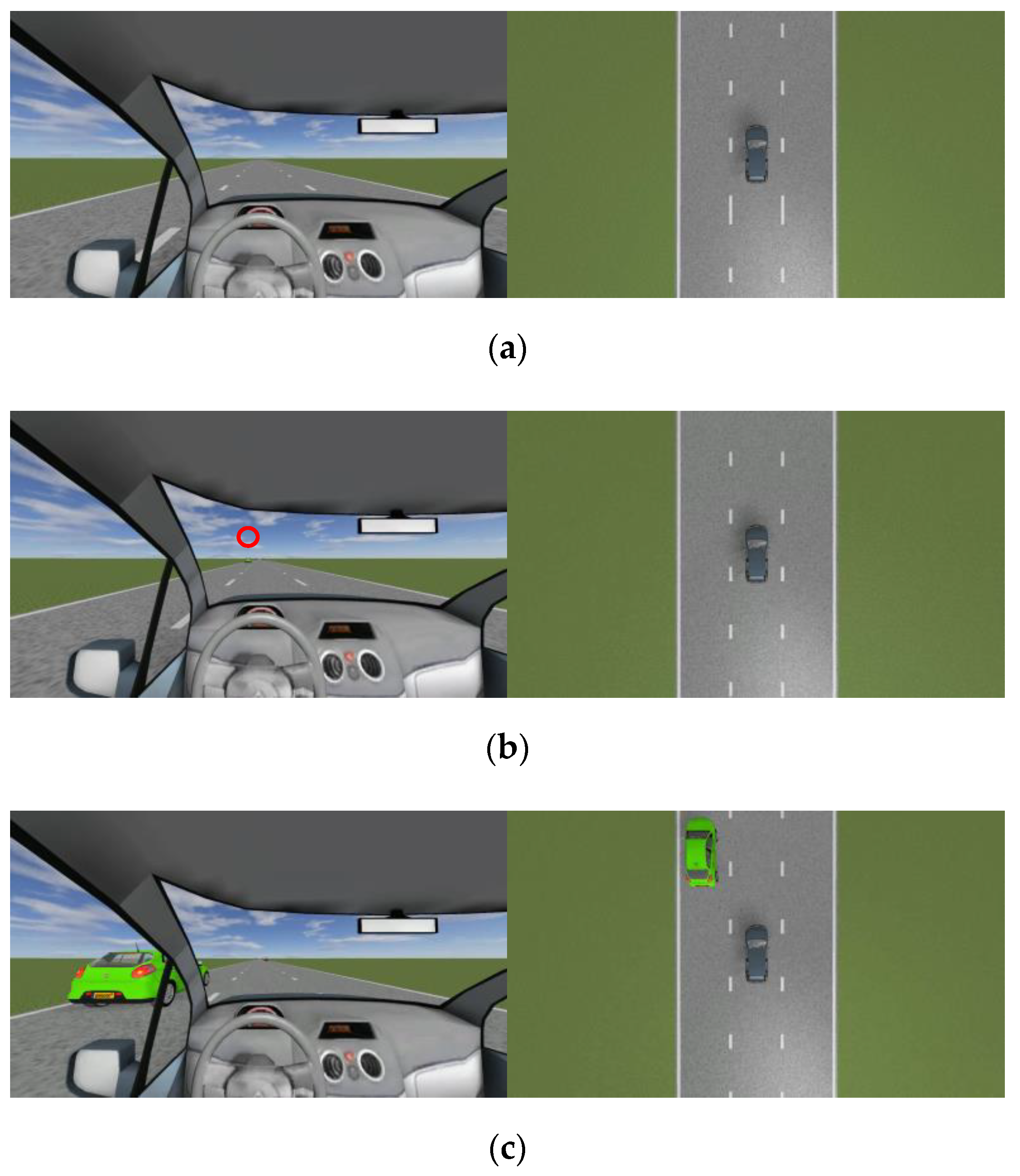
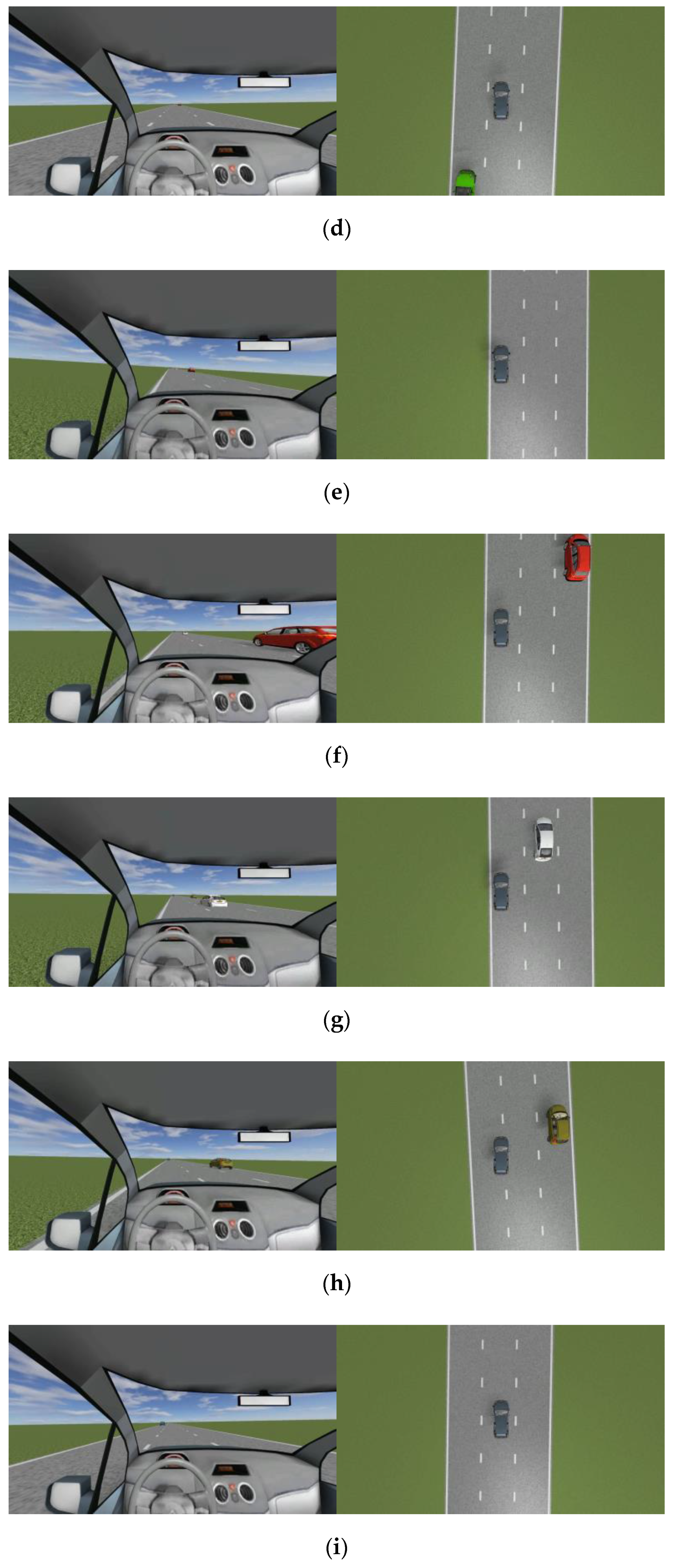
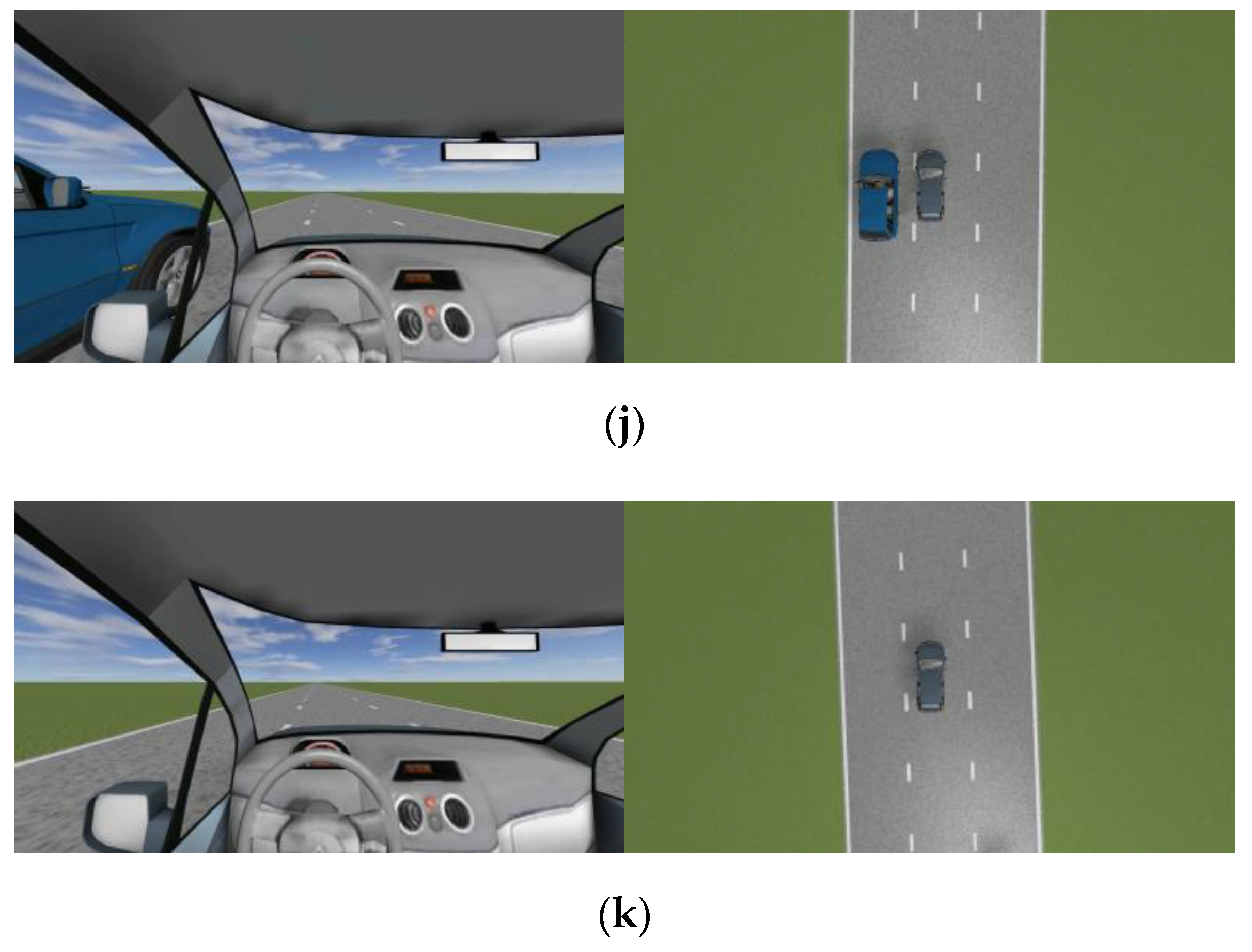
5.1. Traffic Scene Construction
5.2. Test Process Design
6. Test Results and Analysis
7. Conclusions
- In this study, according to the driving characteristics of a vehicle, the driving demand of a vehicle in a cluster environment was analyzed, and the dynamic prediction algorithm based on the car-following model of the cluster environment was proposed;
- Based on the forward calculation algorithm, passive control of the vehicle powertrain system was solved. Based on passive control, the vehicle power demand forecast, the driver’s driving operation, an active control strategy for the vehicle powertrain system was designed;
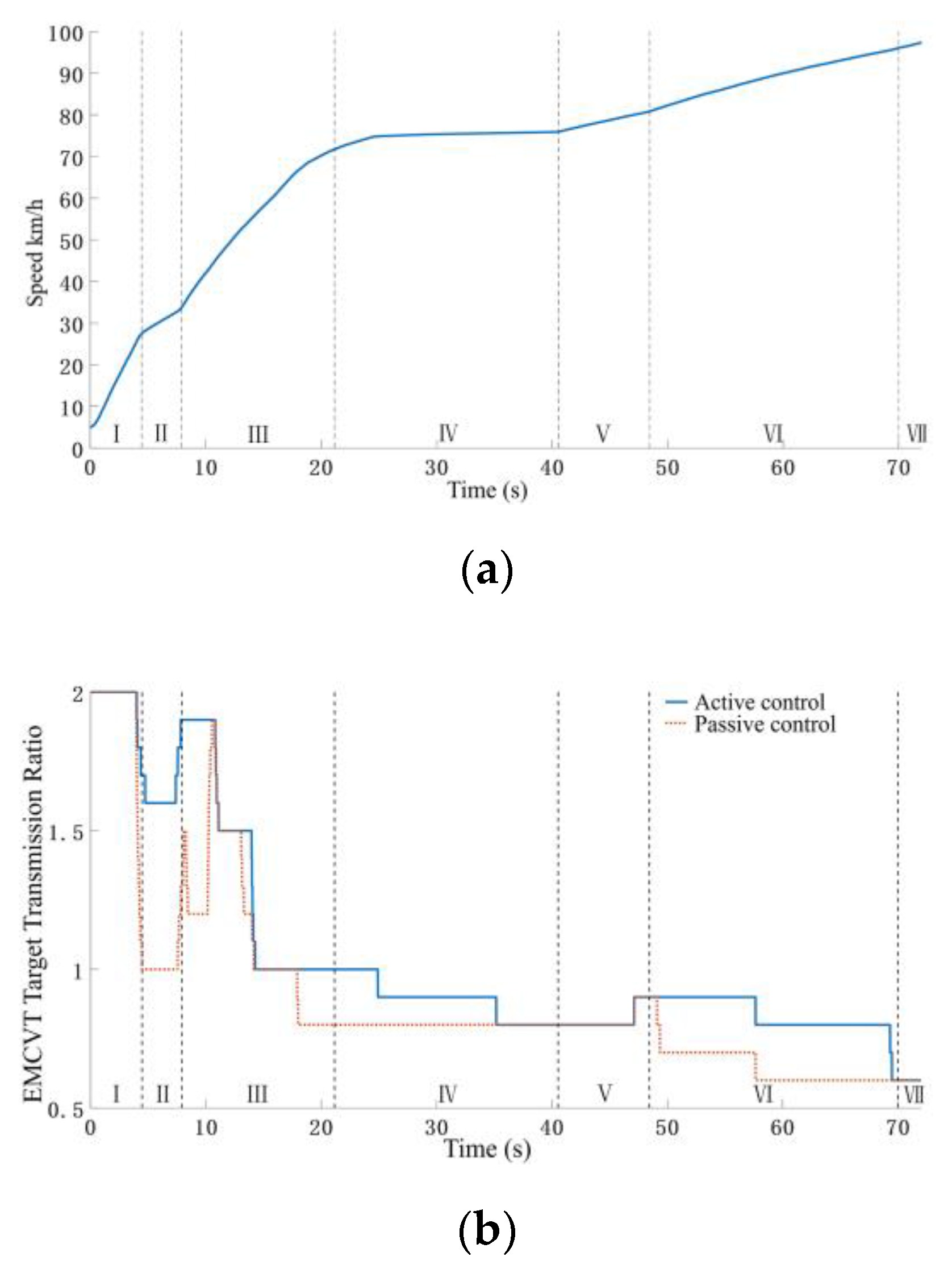
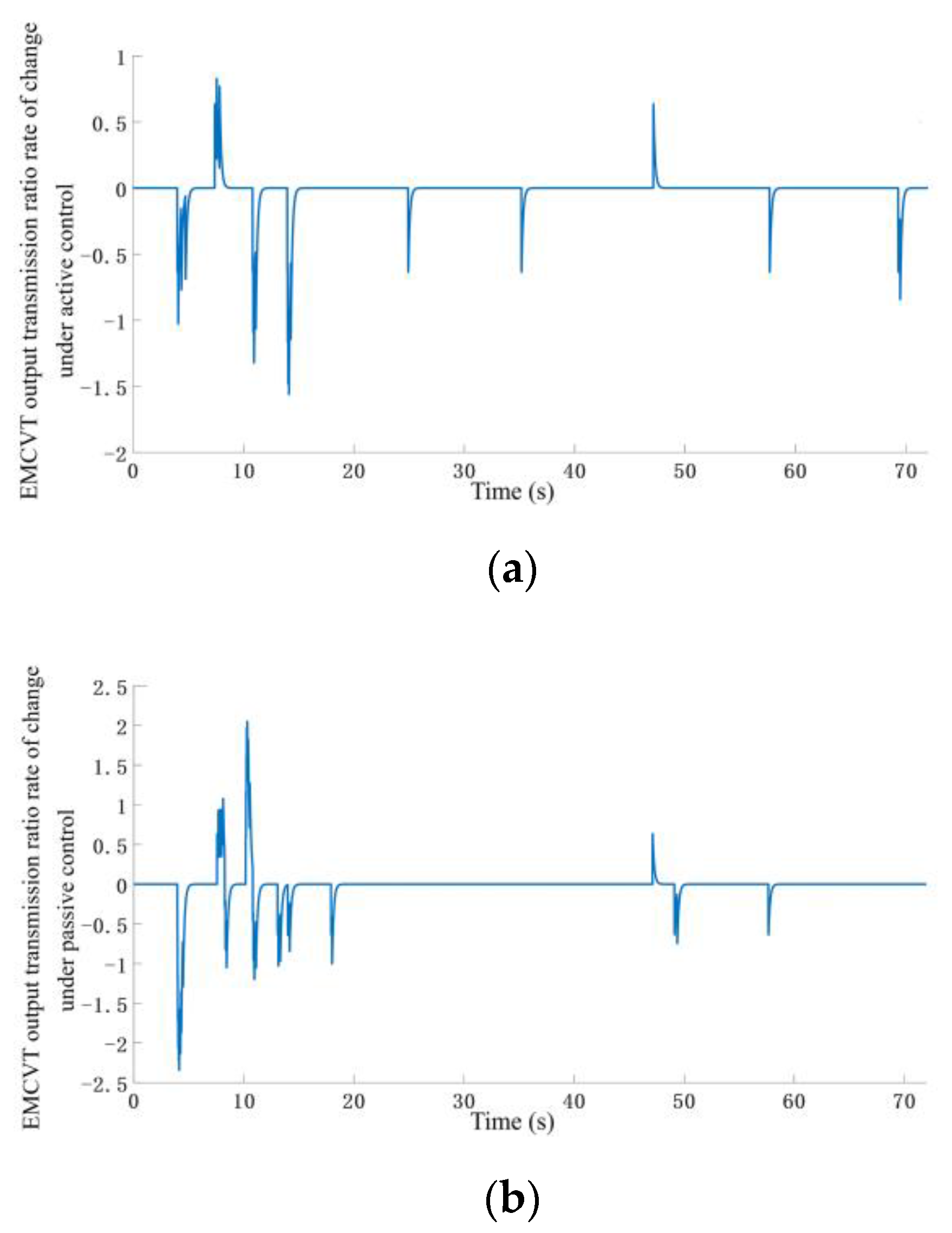
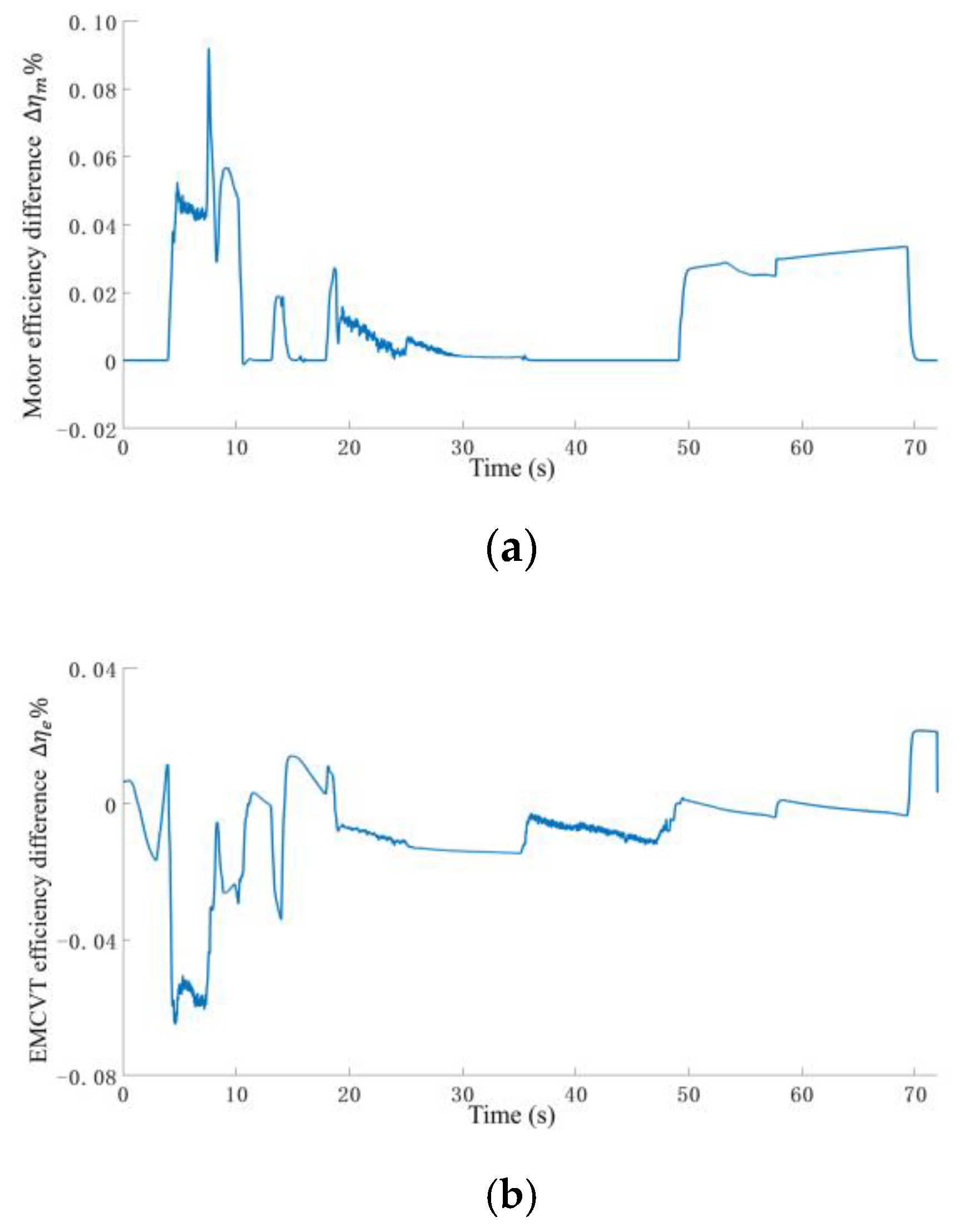
- The control strategy was tested based on the driver’s real-time test platform. The test data showed that under the same hardware conditions, the vehicle powertrain under the control of the active control strategy can effectively and quickly provide backup power compared with the passive control strategy. Compared with passive control, under the active control strategy, the motor efficiency increased by 0.61%, the EMCVT transmission ratio average rate of change reduced by 42.57%, and the overall efficiency of the vehicle powertrain system increased by 0.6%.
Author Contributions
Funding
Conflicts of Interest
References
- Yu, Z.; Guo, G. Coordinated Path Following Control of Vehicle Formations in Vehicular Network Environment. Control Eng. China 2015, 5, 804–808. [Google Scholar]
- Cerna, F.V.; Pourakbari-Kasmaei, M.; Contreras, J.; Gallego, L.A. Optimal Selection of Navigation Modes of HEVs Considering CO 2 Emissions Reduction. IEEE Trans. Veh. Technol. 2019, 68, 2196–2206. [Google Scholar] [CrossRef]
- Ma, Y.; Huang, J.; Zhao, H. Method of vehicle formation control based on Vehicle to Vehicle communication. J. Jilin Univ. (Eng. Technol. Ed.) 2018. [Google Scholar] [CrossRef]
- Tribioli, L. Energy-Based Design of Powertrain for a Re-Engineered Post-Transmission Hybrid Electric Vehicle. Energies 2017, 10, 918. [Google Scholar] [CrossRef]
- He, H.; Liu, Z.; Zhu, L.; Liu, X. Dynamic Coordinated Shifting Control of Automated Mechanical Transmissions without a Clutch in a Plug-In Hybrid Electric Vehicle. Energies 2012, 5, 3094–3109. [Google Scholar] [CrossRef]
- Liu, Y.; Li, J.; Ye, M.; Qin, D.; Zhang, Y.; Lei, Z. Optimal energy management strategy for a plug-in hybrid electric vehicle based on road grade information. Energies 2017, 10, 412. [Google Scholar] [CrossRef]
- Liu, Y.; Li, J.; Chen, Z.; Qin, D.; Zhang, Y. Research on a multi-objective hierarchical prediction energy management strategy for range extended fuel cell vehicles. J. Power Source 2019, 429, 55–66. [Google Scholar] [CrossRef]
- Hu, Y.; Li, W.; Xu, H.; Xu, G. An online learning control strategy for hybrid electric vehicle based on fuzzy Q-learning. Energies 2015, 8, 11167–11186. [Google Scholar] [CrossRef]
- Cheng, Y.H.; Lai, C.M. Control strategy optimization for parallel hybrid electric vehicles using a memetic algorithm. Energies 2017, 10, 305. [Google Scholar] [CrossRef]
- Jin, S.; Wang, D.; Tao, P.; Li, P. Non-lane-based full velocity difference car following model. Phys. A 2010, 389, 4654–4662. [Google Scholar] [CrossRef]
- Du, Y.; Zhou, Z.; Sun, L. Novel Statistical Analysis Approach for Free-Flow Speed on Real-Time Traffic Data. In Proceedings of the Seventh International Conference on Fuzzy Systems & Knowledge Discovery, Yantai, China, 10–12 August 2010. [Google Scholar]
- Xu, C. Distribution of Vehicle Free Flow Speeds Based on Gaussian Mixture Model. J. Highw. Transp. Res. Dev. 2012, 29, 132–158. [Google Scholar]
- Zhao, X. Analysis on the free flow speed on the double-lane highway and its influence. Highw. Transp. Inn. Mong. 2002, 1, 5–7. [Google Scholar]
- Li, H.; Pei, Y.; Liang, Z. Factors influencing free flow speed on expressway. J. Jilin Univ. (Eng. Technol. Ed.) 2007, 37, 772–776. [Google Scholar]
- Transportation Research Board. Highway Capacity Manual, 5th ed.; National Academy of Sciences: Washington, DC, USA, 2010. [Google Scholar]
- Reuschel, A. Vehicle Movements in the Column Uniformly Accelerated or Delayed. Oesterrich. Ingr. Arch. 1950, 4, 193–215. [Google Scholar]
- Jiang, R.; Wu, Q.; Zhu, Z. Full velocity difference model for a car-following theory. Phys. Rev. E 2001, 64, 017101. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bando, M.; Hasebe, K.; Nakayama, A.; Shibata, A.; Sugiyama, Y. Dynamical model of traffic congestion and numerical simulation. Phys. Rev. E 1995, 51, 1035–1995. [Google Scholar] [CrossRef] [PubMed]
- He, Z.C.; Sun, W.B. A new car-following model considering lateral separation and overtaking expectation. Acta Phys. Sin. 2013, 10, 108901. [Google Scholar]
- Zhang, G.; Yan, J. Study of a Car-following Model Considering the Influence of Overtaking Possibility. For. Eng. 2014, 30, 98–103. [Google Scholar]
- Transportation Research Board. Highway Capacity Manual: 1994 Update; Transportation Research Board: Washington, DC, USA, 1994; pp. 158–189. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
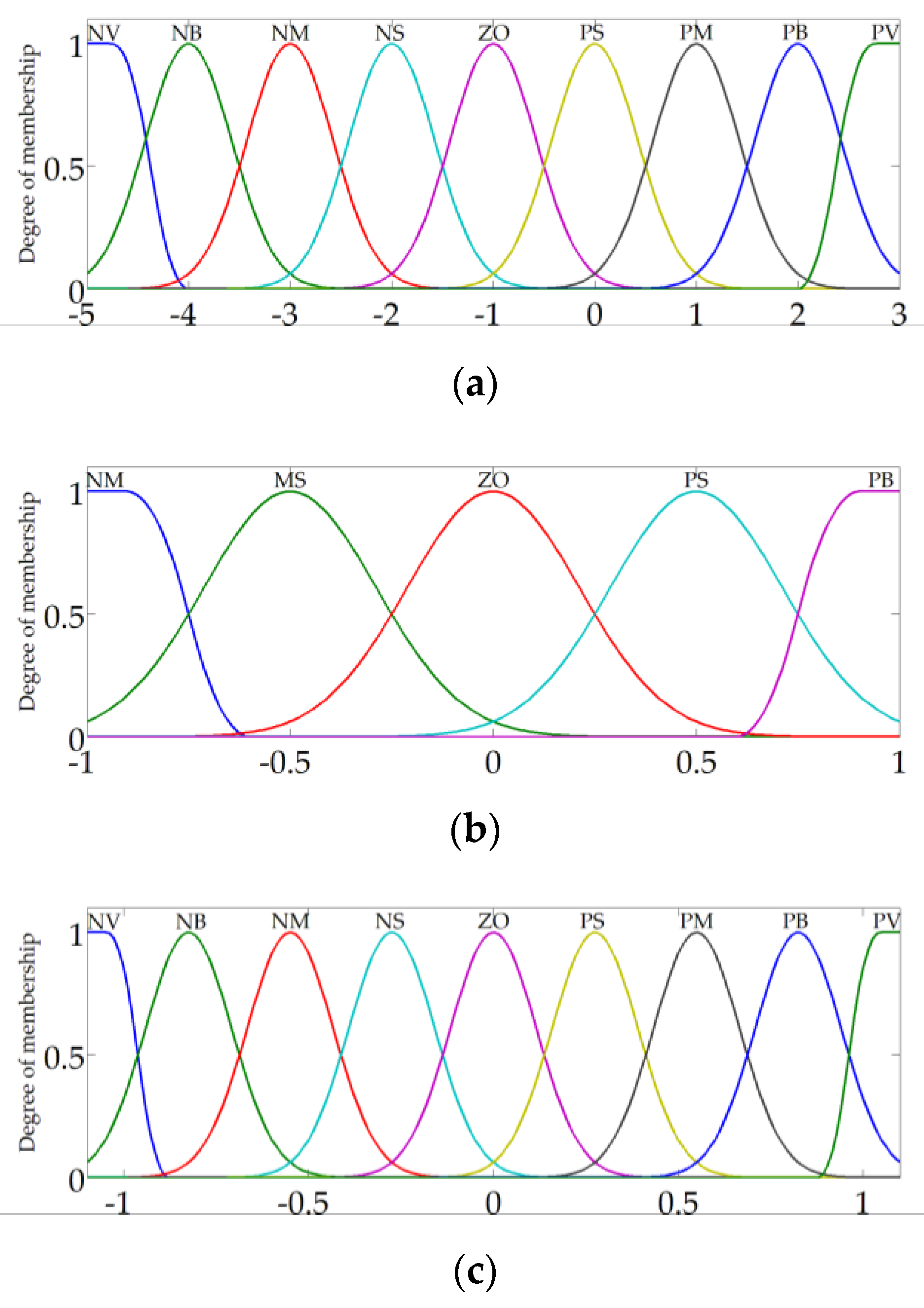
| Expected Acceleration | Change Rate for The Accelerator Pedal Opening | ||||
|---|---|---|---|---|---|
| NM | NS | ZO | PS | PM | |
| NV | NV | NV | NB | ZO | ZO |
| NB | NB | NB | NM | ZO | ZO |
| NM | NM | NM | NS | ZO | ZO |
| NS | NM | NS | NS | ZO | ZO |
| ZO | NM | NS | NS | ZO | ZO |
| PS | ZO | ZO | ZO | PS | PS |
| PM | ZO | ZO | PS | PM | PM |
| PB | ZO | ZO | PM | PB | PB |
| PV | ZO | ZO | PB | PV | PV |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, M.; Long, Y.; Sui, Y.; Liu, Y.; Li, Q. Active Control and Validation of the Electric Vehicle Powertrain System Using the Vehicle Cluster Environment. Energies 2019, 12, 3642. https://doi.org/10.3390/en12193642
Ye M, Long Y, Sui Y, Liu Y, Li Q. Active Control and Validation of the Electric Vehicle Powertrain System Using the Vehicle Cluster Environment. Energies. 2019; 12(19):3642. https://doi.org/10.3390/en12193642
Chicago/Turabian StyleYe, Ming, Yitao Long, Yi Sui, Yonggang Liu, and Qiao Li. 2019. "Active Control and Validation of the Electric Vehicle Powertrain System Using the Vehicle Cluster Environment" Energies 12, no. 19: 3642. https://doi.org/10.3390/en12193642
APA StyleYe, M., Long, Y., Sui, Y., Liu, Y., & Li, Q. (2019). Active Control and Validation of the Electric Vehicle Powertrain System Using the Vehicle Cluster Environment. Energies, 12(19), 3642. https://doi.org/10.3390/en12193642