Improved SVPWM Fault-Tolerant Control Strategy for Five-Phase Permanent-Magnet Motor



Abstract
:1. Introduction
2. Model and Voltage Matrices
3. Generalized Five-Phase SVPWM Fault-Tolerant Control
- Simplification of voltage vector matrices and diagrams under single-phase open-circuit fault;
- Voltage vector selection and calculation;
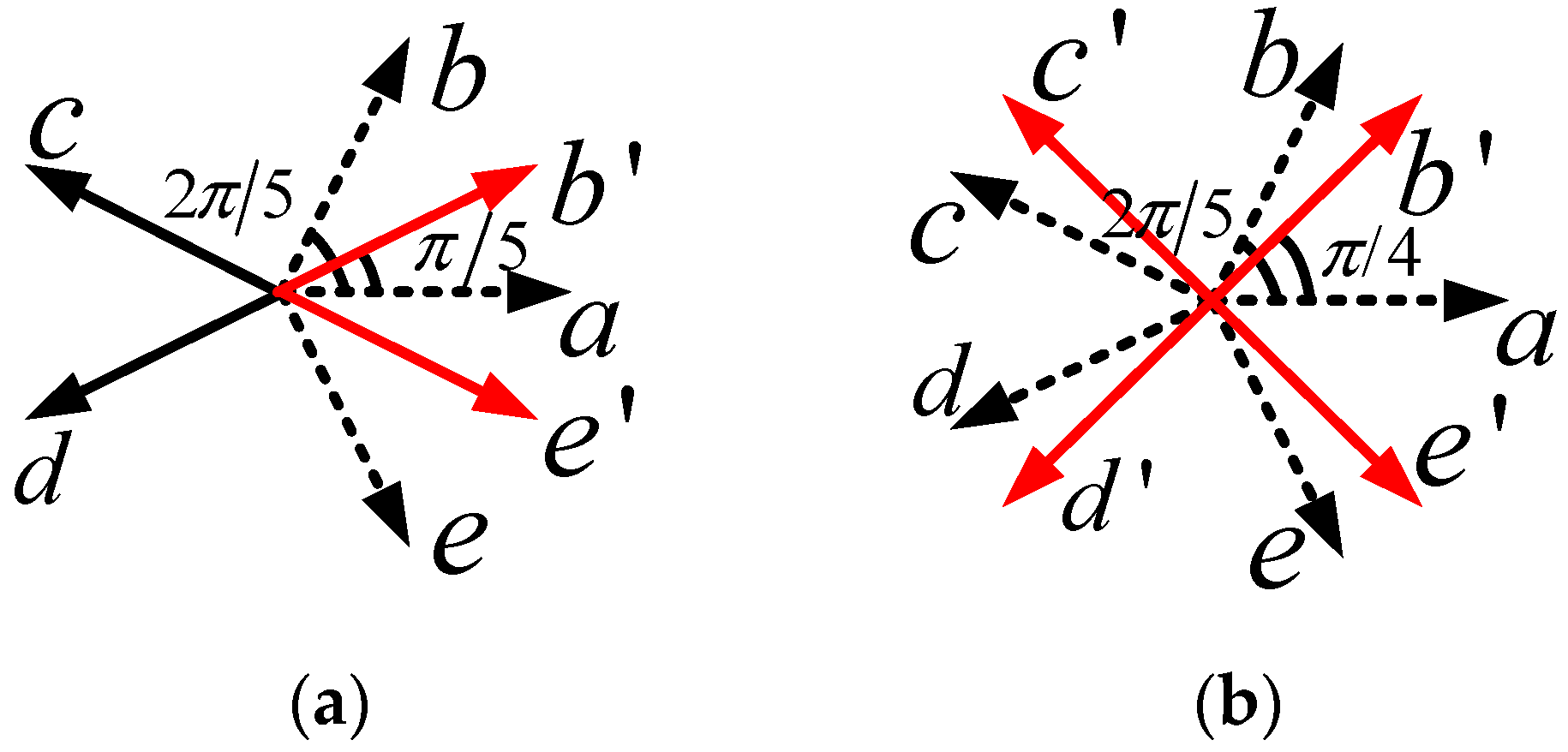
- Analysis of the parameter α1. α1 is the electrical angle from α-axis to phase B counterclockwise.
3.1. Voltage Vector Matrices
3.2. Matrices Simplification
3.3. Vector Selection and Operation Time Calculation
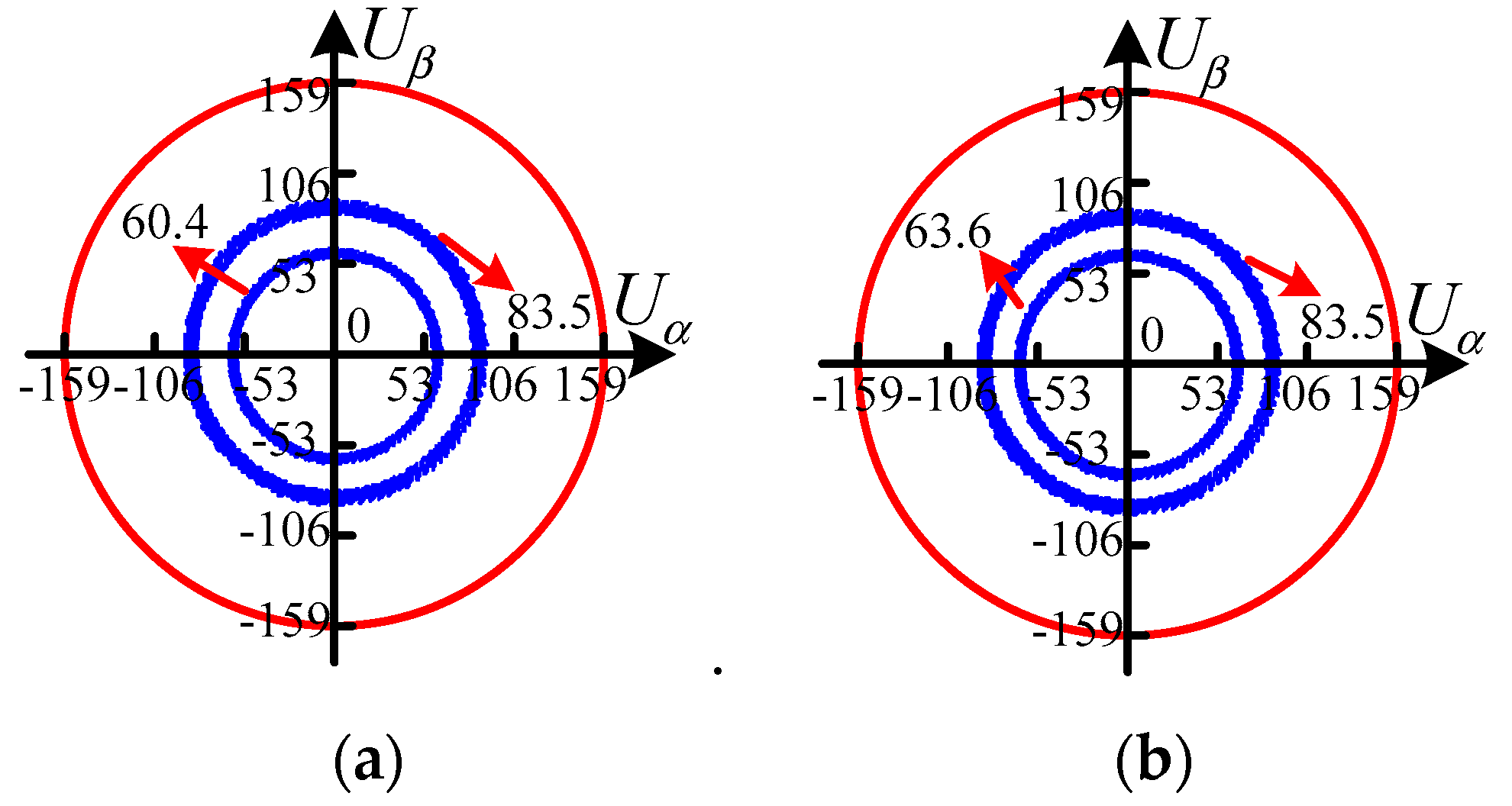
3.4. Influence of Parameter α1 on DC-Bus Voltage Utilization and Harmonic Current Suppression
4. Comparison and Evaluation
4.1. Comparison of Voltage Vectors
4.2. Comparison of DC-Bus Voltage Utilization
4.3. Comparison of DC-Bus Voltage Utilization
5. Simulation and Experimental Verification
5.1. Simulation
5.2. Experimental Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lee, C.H.T.; Angle, M.; Bhalla, K.K.; Qasim, M.; Mei, J.; Mohammadi, S.; Iyer, K.L.V.; Sinkular, J.J.; Kirtley, J.L. Quantitative comparison of vernier permanent-magnet motors with interior permanent-magnet motor for hybrid electric vehicles. Energies 2018, 11, 2546. [Google Scholar] [CrossRef] [Green Version]
- Shi, Y.; Jian, L. A novel dual-permanent-magnet-excited machine with flux strengthening effect for low-speed large-torque applications. Energies 2018, 11, 153. [Google Scholar] [CrossRef] [Green Version]
- Yang, H.; Lin, H.; Zhu, Z.Q.; Lyu, S.; Liu, Y. Design and analysis of novel asymmetric-stator-pole flux reversal pm machine. IEEE Trans. Ind. Electron. 2020, 67, 101–114. [Google Scholar] [CrossRef] [Green Version]
- Zheng, P.; Wu, F.; Lei, Y.; Sui, Y.; Yu, B. Investigation of a novel 24-slot/14-pole six-phase fault-tolerant modular permanent-magnet in-wheel motor for electric vehicles. Energies 2013, 6, 4980–5002. [Google Scholar] [CrossRef]
- Sui, Y.; Zheng, P.; Yin, Z.; Wang, M.; Wang, C. Open-circuit fault-tolerant control of five-phase PM machine based on reconfiguring maximum round magnetomotive force. IEEE Trans. Ind. Electron. 2018, 66, 48–59. [Google Scholar] [CrossRef]
- Wang, B.; Wang, J.; Griffo, A.; Sen, B. Experimental Assessments of a triple redundant nine-phase fault-tolerant PMA SynRM drive. IEEE Trans. Ind. Electron. 2019, 66, 772–783. [Google Scholar] [CrossRef] [Green Version]
- Chen, Q.; Xu, G.; Liu, G.; Zhao, W.; Liu, L.; Lin, Z. Torque ripple reduction in five-phase interior permanent magnet motors by lowering interactional MMF. IEEE Trans. Ind. Electron. 2018, 65, 8520–8531. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, J.; Cheng, M. Line-modulation-based flux-weakening control for permanent-magnet synchronous machines. IET Power Electron. 2018, 11, 930–936. [Google Scholar] [CrossRef]
- Zhou, Y.; Yan, Z.; Duan, Q.; Wang, L.; Wu, X. Direct torque control strategy of five-phase PMSM with load capacity enhancement. IET Power Electron. 2018, 12, 598–606. [Google Scholar] [CrossRef]
- Tian, B.; An, Q.T.; Duan, J.D.; Sun, D.Y.; Sun, L.; Semenov, D. Decoupled modeling and nonlinear speed control for five-phase PM motor under single-phase open fault. IEEE Trans. Power Electron. 2017, 32, 5473–5486. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, J.; Cheng, M. Common model predictive control for permanent-magnet synchronous machine drives considering single-phase open-circuit fault. IEEE Trans. Power Electron. 2017, 32, 5862–5872. [Google Scholar] [CrossRef]
- Sen, B.; Wang, J. Stationary frame fault-tolerant current control of polyphase permanent-magnet machines under open-circuit and short-circuit faults. IEEE Trans. Power Electron. 2016, 31, 4684–4696. [Google Scholar]
- Xu, L.; Liu, G.; Zhao, W.; Yang, X.; Cheng, R. Hybrid stator design of fault-tolerant permanent-magnet vernier machines for direct-drive applications. IEEE Trans. Ind. Electron. 2017, 64, 179–190. [Google Scholar] [CrossRef]
- Zhao, W.; Chen, Z.; Xu, D.; Ji, J.; Zhao, P. Unity power factor fault-tolerant control of linear permanent-magnet vernier motor fed by a floating bridge multilevel inverter with switch fault. IEEE Trans. Ind. Electron. 2018, 65, 9113–9123. [Google Scholar] [CrossRef]
- Mohammadpour, A.; Mishra, S.; Parsa, L. Fault-tolerant operation of multiphase permanent-magnet machines using iterative learning control. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 201–211. [Google Scholar] [CrossRef]
- Chai, M.; Xiao, D.; Dutta, R.; Fletcher, J.E. Space vector PWM techniques for three-to-five-phase indirect matrix converter in the overmodulation region. IEEE Trans. Ind. Electron. 2016, 63, 550–561. [Google Scholar] [CrossRef]
- Xia, Y.; Zhang, X.; Qiao, M.; Yu, F.; Wei, Y.; Zhu, P. Research on a new indirect space-vector overmodulation strategy in matrix converter. IEEE Trans. Ind. Electron. 2016, 63, 1130–1141. [Google Scholar] [CrossRef]
- Zhou, C.; Yang, G.; Su, J. PWM strategy with minimum harmonic distortion for dual three-phase permanent-magnet synchronous motor drives operating in the overmodulation region. IEEE Trans. Power Electron. 2016, 31, 1367–1380. [Google Scholar] [CrossRef]
- Liu, G.; Qu, L.; Zhao, W.; Chen, Q.; Xie, Y. Comparison of two SVPWM control strategies of five-phase fault-tolerant permanent-magnet motor. IEEE Trans. Power Electron. 2016, 31, 6621–6630. [Google Scholar] [CrossRef]
- Chen, K.Y.; Xie, Y.L. Reducing harmonics distortion in five-phase VSI using space-vector-based optimal hybrid PWM. IEEE Trans. Power Electron. 2017, 32, 2098–2113. [Google Scholar] [CrossRef]
- Bermudez, M.; Gonzalez-Prieto, I.; Barrero, F.; Guzman, H.; Duran, M.J.; Kestelyn, X. Open-phase fault-tolerant direct torque control technique for five-phase induction motor drives. IEEE Trans. Ind. Electron. 2017, 64, 902–911. [Google Scholar] [CrossRef] [Green Version]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Simulation Parameters/Units | Values |
|---|---|---|
| Npm | Number of permanent magnet pole pairs | 21 |
| Is | Stator current rms/A | 10 |
| n | Rotating speed/(r/min) | 600 |
| Te | Average torque/(Nm) | 38 |
| Udc | DC-bus voltage/(V) | 159 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, L.; Zhao, W.; Liu, G. Improved SVPWM Fault-Tolerant Control Strategy for Five-Phase Permanent-Magnet Motor. Energies 2019, 12, 4626. https://doi.org/10.3390/en12244626
Xu L, Zhao W, Liu G. Improved SVPWM Fault-Tolerant Control Strategy for Five-Phase Permanent-Magnet Motor. Energies. 2019; 12(24):4626. https://doi.org/10.3390/en12244626
Chicago/Turabian StyleXu, Liang, Wenxiang Zhao, and Guohai Liu. 2019. "Improved SVPWM Fault-Tolerant Control Strategy for Five-Phase Permanent-Magnet Motor" Energies 12, no. 24: 4626. https://doi.org/10.3390/en12244626
APA StyleXu, L., Zhao, W., & Liu, G. (2019). Improved SVPWM Fault-Tolerant Control Strategy for Five-Phase Permanent-Magnet Motor. Energies, 12(24), 4626. https://doi.org/10.3390/en12244626