Comparison of Heat-Pipe Cooling System Design Processes in Railway Propulsion Inverter Considering Power Module Reliability


Abstract
:1. Introduction
2. Control Scheme and Mission Profile of Railway Propulsion System
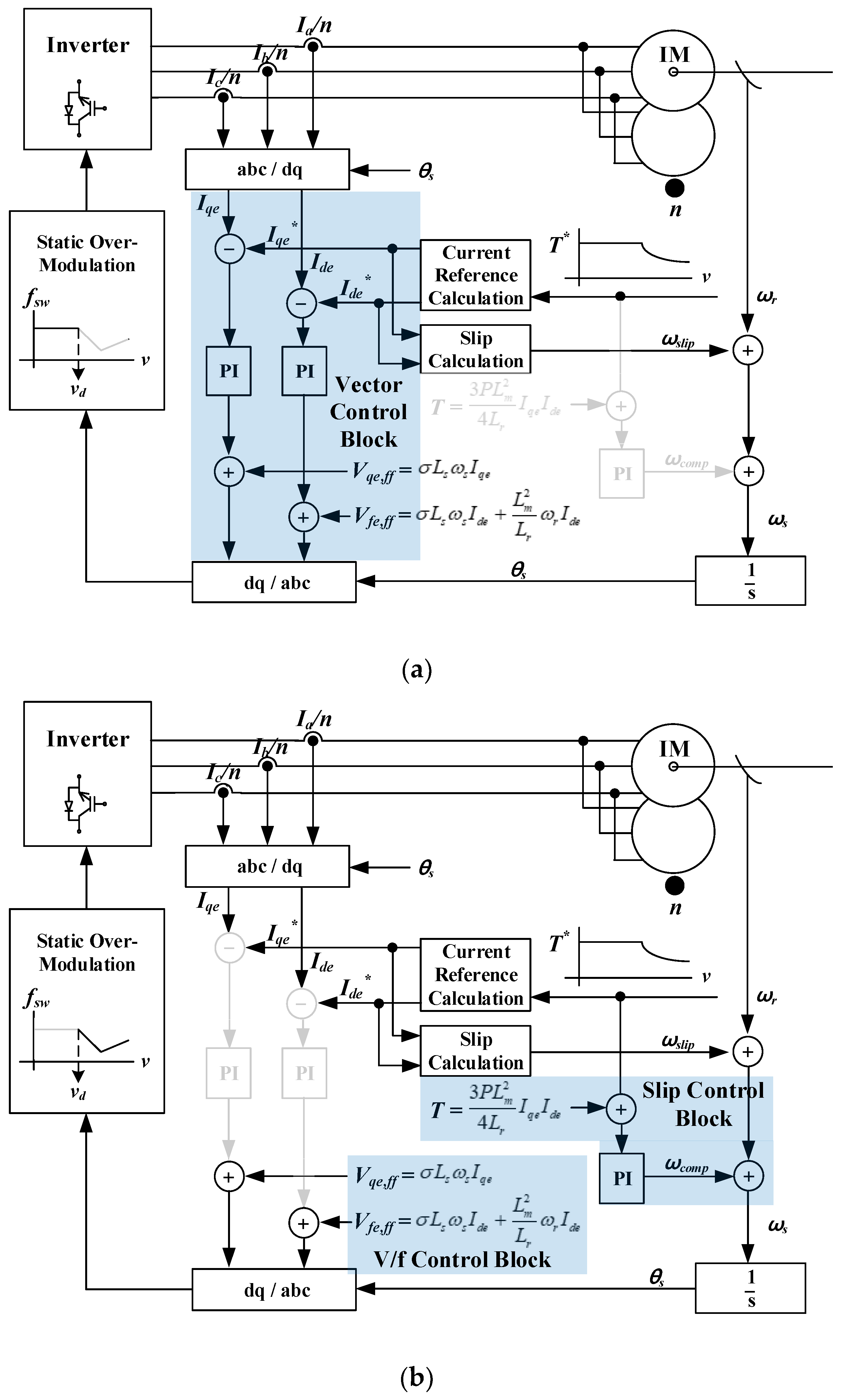
2.1. Control Scheme
2.2. Mission Profile
3. Design Process of Heat-Pipe Cooling System
3.1. First Step: Power Loss Calculation Based on Control Scheme and Mission Profile
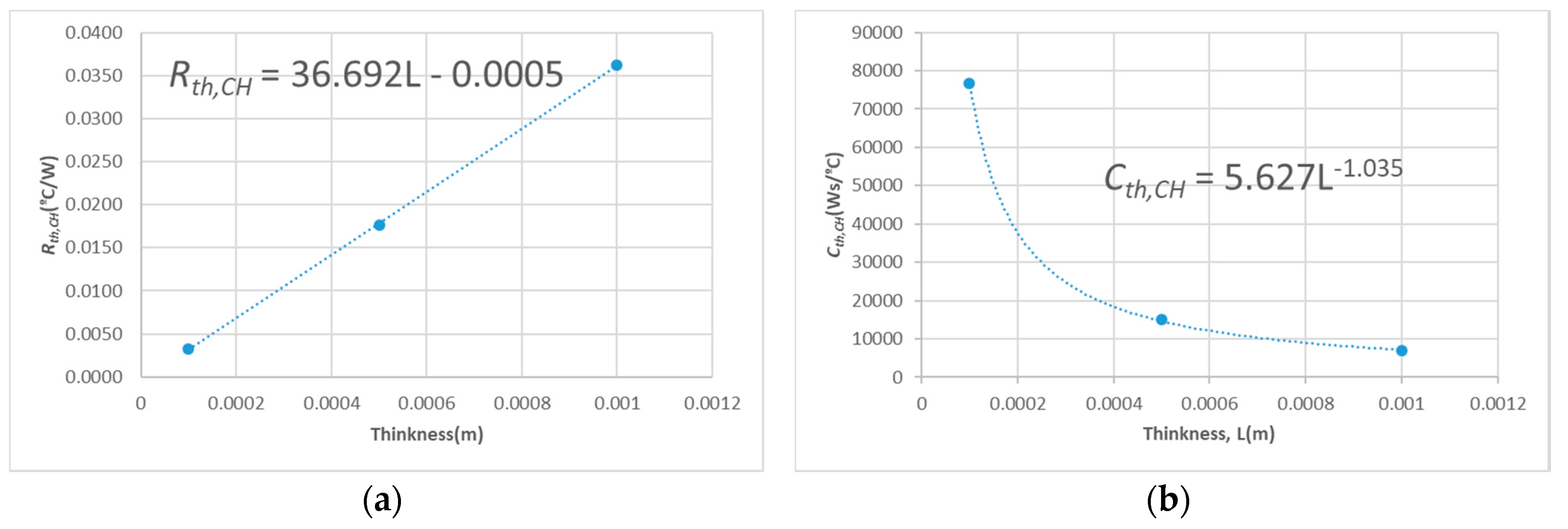
3.2. Second Step: Thermal Resistance Calculation of Heat-Pipe Cooling System Based on Junction Temperature of IGBT Module
4. Heat-Pipe Cooling System Design
5. Comparison of Heat-Pipe Cooling Systems
5.1. Design Feasibility
5.2. Size and Weight of Heat-Pipe Cooling Systems
5.3. Lifetime Estimation of the IGBT Module
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| IGBT | Insulated gate bipolar mode transistor |
| MTBF | Mean time between failures |
| PWM | Pulse-width modulation |
| FEM | Finite element method |
| Ide* | d-axis reference current of motor |
| Iqe* | q-axis reference current of motor |
| T* | Reference torque of motor |
| v | Speed of induction motor |
| vd | Defined speed for changing control scheme |
| vbase | Base speed of induction motor |
| Vde*, Vqe* | d-/q-axis reference voltages of inverter |
| Vxa, x = a, b, c | Output voltages of inverter |
| P | Power of motor |
| T | Torque of motor |
| fsw | Switching frequency of inverter |
| ta | Acceleration time of train |
| tc | Coasting time of train |
| td | Deceleration time of train |
| ts | Stopping time of train |
| Rth,IGBT,JCi, Cth,IGBT,JCi,i = 1,2,3,4 | Thermal resistances and capacitances of IGBT part |
| Rth,Diode,JCi, Cth,Diode,JCi,i = 1,2,3,4 | Thermal resistances and capacitances of diode part |
| Rth,IGBT,JC | Total thermal resistance of IGBT part |
| Cth,IGBT,JC | Total thermal capacitance of IGBT part |
| Rth,CH | Thermal resistance of thermal grease |
| Cth,CH | Thermal capacitance of thermal grease |
| Rth,HA | Thermal resistance of heat-pipe cooling system |
| Tj,max | Maximum allowed operation temperature of IGBT module |
| Tmargin | Temperature design margin |
| Tj,IGBT | Junction temperatures of IGBT part |
| TC | Case temperature of IGBT module |
| THP | Temperature of heat-pipe cooling system |
| TA | Ambient temperature |
| tf | Period of fundamental current of inverter |
| tm | Period of mission profile |
| Ploss,IGBT | Power loss of IGBT part |
| Ploss,Didoe | Power loss of Diode part |
| Ploss,module | Total power loss of IGBT module |
| Ploss,IGBT,tf, Ploss,module,tf | Power losses of IGBT and Diode averaged for tf |
| Ploss,IGBT,tf,max, Ploss,module,tf,max | Maximum values of Ploss,IGBT,tf and Ploss,module,tf |
| Ploss,IGBT,tm, Ploss,module,tm | Power losses of IGBT and Diode averaged for tm |
References
- Skudelny, H.; Weinhardt, M. An investigation of the dynamic response of two induction motors in a locomotive truck fed by a common inverter. IEEE Trans. Ind. Appl. 1984, 1, 173–179. [Google Scholar]
- Youssef, M.Z.; Woronowicz, K.; Aditya, K.; Azeez, N.A.; Williamson, S.S. Design and development of an efficient multilevel DC/AC traction inverter for railway transportation electrification. IEEE Trans. Power Electron. 2016, 4, 3036–3042. [Google Scholar] [CrossRef]
- Calleja, C.; L’opez-de-Heredia, A.; Gaztanaga, H.; Aldasoro, L.; Txomin, N. Validation of a modified direct-self-control strategy for PMSM in railway—Traction applications. IEEE Trans. Ind. Electron. 2016, 8, 5143–5155. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, W.; Lian, C.; Gao, S. Six-step mode control of IPMSM for railway vehicle traction eliminating the DC offset in input current. IEEE Trans. Power Electron. 2019, 9, 8981–8993. [Google Scholar] [CrossRef]
- Broche, C.; Lobry, J.; Colignon, P.; Labart, A. Harmonic reduction in DC link current of a PWM induction motor drive by active filtering. IEEE Trans. Power Electron. 1992, 10, 633–643. [Google Scholar] [CrossRef]
- Ouyang, H.; Zhang, K.; Zhang, P.; Kang, Y.; Xiong, J. Repetitive compensation of fluctuating dc link voltage for railway traction drives. IEEE Trans. Power Electron. 2011, 8, 2160–2171. [Google Scholar] [CrossRef]
- Ronanki, D.; Singh, S.A.; Williamson, S.S. Comprehensive topological overview of rolling stock architectures and recent trends in electric railway traction systems. IEEE Trans. Transport. Electrific. 2017, 9, 724–738. [Google Scholar] [CrossRef]
- Diao, L.; Tang, J.; Loh, H.C.; Yin, Y.; Wang, L.; Liu, Z. An efficient DSP–FPGA-based implementation of hybrid PWM for electric rail traction induction motor control. IEEE Trans. Power Electron. 2018, 4, 3276–3288. [Google Scholar] [CrossRef]
- Perpiñà, X.; Jordà, X.; Vellvehi, M.; Rebollo, J.; Mermet-Guyennet, M. Long-Term reliability of railway power inverters cooled by heat-pipe-based systems. IEEE Trans. Ind. Electron. 2011, 7, 2662–2672. [Google Scholar]
- Andresen, M.; Ma, K.; Buticchi, G.; Falck, J.; Blaabjerg, F.; Liserre, M. Junction temperature control for more reliable power electronics. IEEE Trans. Power Electron. 2018, 1, 765–776. [Google Scholar] [CrossRef] [Green Version]
- Shabgard, H.; Bergman, T.L.; Sharifi, N.; Faghri, A. High temperature latent heat thermal energy storage using heat pipes. Int. J. Heat Mass Transf. 2010, 7, 2979–2988. [Google Scholar] [CrossRef]
- Esarte, J.; Blanco, J.M.; Bernardini, A.; San José, J.T. Optimizing the design of a two-phase cooling system loop heat pipe: Wick manufacturing with the 3D selective laser melting printing technique and prototype testing. Appl. Therm. Eng. 2017, 1, 407–419. [Google Scholar] [CrossRef]
- Deng, S.; Li, K.; Xie, Y.; Wu, C.; Wang, P.; Yu, M.; Li, B.; Zheng, J. Heat pipe thermal management based on high-rate discharge and pulse cycle tests for lithium-ion batteries. Energies 2019, 12, 3413. [Google Scholar] [CrossRef] [Green Version]
- Chi, R.G.; Rhi, S.H. Oscillating heat pipe cooling system of electric vehicle’s li-ion batteries with direct contact bottom cooling mode. Energies 2019, 12, 1698. [Google Scholar] [CrossRef] [Green Version]
- Hamidi, A.; Coquery, G.; Lallemand, R.; Vales, P.; Dorkel, J.M. Temperature measurements and thermal modeling of high power IGBT multichip modules for reliability investigations in traction applications. Microelectron. Reliab. 1998, 38, 1353–1359. [Google Scholar] [CrossRef]
- Watanabe, T.; Fukuda, N. Reliability of Power Converters—Lifetime Cycle Approach. In Proceedings of the 14th International Power Electronics and Motion Control Conference (EPE-PEMC), Ohrid, Macedonia, 6–8 September 2010; pp. S8–10–11. [Google Scholar]
- Perpiñà, X.; Serviere, J.F.; Urresti-Ibañez, J.; Cortés, I.; Jordà, X.; Hidalgo, S.; Rebollo, J.; Mermet-Guyennet, M. Analysis of clamped inductive turnoff failure in railway traction IGBT power modules under overload conditions. IEEE Trans. Ind. Electron. 2011, 7, 2706–2714. [Google Scholar]
- Ouni, F.; Ammar, F.B. Reliability Estimation of Sahel Tunisian Railway Drive System. In Proceedings of the 16th IEEE Mediterranean Electrotechnical Conference, Yasmine Hammamet, Tunisia, 25–28 March 2012; pp. 614–617. [Google Scholar]
- Hayashiya, H.; Masuda, M.; Noda, Y.; Suzuki, K.; Suzuki, T. Reliability Analysis of DC Traction Power Supply System for Electric Railway. In Proceedings of the 19th European Conference on Power Electronics and Applications (EPE’17 ECCE Europe), Warsaw, Poland, 11–14 September 2017; pp. 1–6. [Google Scholar]
- Choi, U.M.; Blaabjerg, F.; Jørgensen, S. Power cycling test methods for reliability assessment of power device modules in respect to temperature stress. IEEE Trans. Power Electron. 2018, 3, 2531–2551. [Google Scholar] [CrossRef] [Green Version]
- Ma, K.; Liserre, M.; Blaabjerg, F.; Kerekes, T. Thermal loading and lifetime estimation for power device considering mission profiles in wind power converter. IEEE Trans. Power Electron. 2015, 2, 590–602. [Google Scholar] [CrossRef]
- Shipurkar, U.; Lyrakis, E.; Ma, K.; Polinder, H.; Ferreira, J.A. Lifetime comparison of power semiconductors in three-level converters for 10-MW wind turbine systems. IEEE Trans. Power Electron. 2018, 9, 1366–1377. [Google Scholar] [CrossRef]
- Alhmoud, L. Reliability improvement for a high-power IGBT in wind energy applications. IEEE Trans. Ind. Electron. 2018, 9, 7129–7137. [Google Scholar] [CrossRef]
- GopiReddy, L.R.; Tolbert, L.M.; Ozpineci, B.; Pinto, J.O.P. Rainflow algorithm-based lifetime estimation of power semiconductors in utility applications. IEEE Trans. Ind. Appl. 2015, 7, 3368–3375. [Google Scholar] [CrossRef]
- Ma, K.; Choi, U.M.; Blaabjerg, F. Prediction and validation of wear-out reliability metrics for power semiconductor devices with mission profiles in motor drive application. IEEE Trans. Power Electron. 2018, 11, 9843–9853. [Google Scholar] [CrossRef] [Green Version]
- Choi, U.M.; Vernica, I.; Blaabjerg, F. Effect of asymmetric layout of IGBT modules on reliability of motor drive inverters. IEEE Trans. Power Electron. 2019, 2, 1765–1772. [Google Scholar] [CrossRef] [Green Version]
- Choi, U.M.; Ma, K.; Blaabjerg, F. Validation of lifetime prediction of IGBT modules based on linear damage accumulation by means of superimposed power cycling tests. IEEE Trans. Ind. Electron. 2018, 4, 3520–3529. [Google Scholar] [CrossRef]
- Wintrich, A.; Nicolai, U.; Tursky, W.; Reimann, T. Application Manual Power Semiconductors; SEMIKRON International GmbH: Nuremberg, Germany, 2015. [Google Scholar]
- Ma, K.; Blaabjerg, F.; Liserre, M. Thermal loading and reliability of 10-MW multilevel wind power converter at different wind roughness classes. IEEE Trans. Ind. Appl. 2013, 3, 909–921. [Google Scholar] [CrossRef]
- Quraan, M.; Siam, J. Modeling and Simulation of Railway Electric Traction with Vector Control Drive. In Proceedings of the IEEE International Conference on Intelligent Rail Transportation (ICIRT), Birmingham, UK, 23–25 August 2016; pp. 1–6. [Google Scholar]
- Peroutka, Z.; Zeman, L. New Field Weakening Strategy for AC Machine Drives for Light Traction Vehicles. In Proceedings of the European Conference on Power Electronics and Applications, Aalborg, Denmark, 2–5 September 2007; pp. 1–10. [Google Scholar]
- Yanol, M.; Iwahori, M. Transition from Slip-Frequency Control to Vector Control for Induction Motor Drives of Traction Applications in Japan. In Proceedings of the Fifth International Conference on Power Electronics and Drive Systems (PEDS), Singapore, 17–20 November 2003; pp. 1246–1251. [Google Scholar]
- Martinez, C.M.; Heucke, M.; Wang, F.Y.; Gao, B.; Cao, D. Driving style recognition for intelligent vehicle control and advanced driver assistance: A survey. IEEE Trans. Intell. Syst. 2018, 3, 666–676. [Google Scholar] [CrossRef] [Green Version]
- IEC 62498-1. Railway Applications—Environmental Conditions for Equipment—Part 1: Equipment on Board Rolling Stock, 1st ed.; IEC 62498-1: Geneva, Switzerland, 2010. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | Value | |
|---|---|---|
| IGBT module | Voltage/Current | 3300 V/1500 A |
| Control Scheme | DC-link voltage | 1500 V |
| Maximum current (only at vector control) | 860 Apeak | |
| Switching frequency | 800 Hz | |
| Defined speed (vd) for changing control | 1056 rpm (23 km/h of train) | |
| Base speed (vbase) | 1800 rpm (39 km/h of train) | |
| Motor | The number of motors connected to inverter | 4 |
| Rated torque per induction motor | 900 Nm | |
| Pole | 4 | |
| Magnetizing inductance | 0.0225 H |
| Junction to case | i | IGBT Part | Diode Part | ||
| Rth,IGBT,JCi (K/W) | Cte,IGBT,JCi (Ws/K) | Rth,Diode,JCi (K/W) | Cth,Diode,JCi (Ws/K) | ||
| 1 | 0.001 | 3 | 0.002414 | 0.8285 | |
| 2 | 0.003869 | 10.855518 | 0.006266 | 5.745292 | |
| 3 | 0.00146 | 175.342466 | 0.002787 | 90.419806 | |
| 4 | 0.001002 | 4974.051896 | 0.001509 | 3702.4519549 | |
| IGBT Part | Diode Part | IGBT Module | ||||
|---|---|---|---|---|---|---|
| Ploss,IGBT,tf,max | Ploss,IGBT,tm | Ploss,Didoe,tf,max | Ploss,Diode,tm | Ploss,module,tf,max | Ploss,module,tm | |
| Power loss | 1656.49 W | 379.39 W | 630.89 W | 155.9 W | 1813.77 W | 535.29 W |
| Case | Tj,max | Tmargin | TA | Thickness of Thermal Grease | Multiplied Power Loss for Rth,IGBT,jc | Multiplied Power Loss for Rth,CH | Multiplied Power Loss for Rth,HA | Rth,HA |
|---|---|---|---|---|---|---|---|---|
| 1 | 423.15 K | 318.15 K | 318.15 K | 0.0002 m | Ploss,IGBT,tf,max | Ploss,module,tf,max | Ploss,module,tf,max | 9.77 K/kW |
| 2 | Ploss,IGBT,tf,max | Ploss,module,tf,max | Ploss,module,tm | 33.12 K/kW | ||||
| 3 | Ploss,IGBT,tf,max | Ploss,module,tm | Ploss,module,tm | 41.28 K/kW | ||||
| 4 | Ploss,IGBT,tm | Ploss,module,tm | Ploss,module,tm | 50.03 K/kW |
| Specification | Material | Dimension |
|---|---|---|
| Baseplate of heat-pipe cooling system | Aluminum (A6063) | 22.5 mm (Thickness) |
| Fin of heat-pipe cooling system | Aluminum (A6063) | 0.8 mm (Thickness) |
| Heat-pipe of heat-pipe cooling system | Copper | 16 mm (Diameter) |
| Case | Rth,HA | Size (W × D × H) | Weight |
|---|---|---|---|
| 1 | 9.77 K/kW | 460 mm × 260 mm × 494 mm | 48.3 kg |
| 2 | 33.12 K/kW | 460 mm × 260 mm × 490 mm | 43.6 kg |
| 3 | 41.28 K/kW | 460 mm × 260 mm x 449 mm | 41.6 kg |
| 4 | 50.03 K/kW | 460 mm × 260 mm × 390 mm | 38.7 kg |
| Parameter | Symbol | Coefficient Value |
|---|---|---|
| Technology Factor | A | - |
| Temperature difference (K) | △T | β1 |
| Min. chip temperature (K) | Tj,min | β2 |
| Pulse duration (s) | ton | β3 |
| Current per bond foot (A) | IB | β4 |
| Voltage class/100 (V) | VC | β5 |
| Bond wire diameter (μm) | D | β6 |
| Season | Temperature |
|---|---|
| Spring | 286.6 K (13.45 °C) |
| Summer | 300.17 K (27.02 °C) |
| Autumn | 287.74 K (14.58 °C) |
| Winter | 271.42 K (−1.73 °C) |
| Season | Accumulated Damage (AD) | |||
|---|---|---|---|---|
| Case 1 | Case 2 | Case 3 | Case 4 | |
| Spring | 3.633 × 10−7 | 5.205 × 10−7 | 6.044 × 10−7 | 6.912 × 10−7 |
| Summer | 4.348 × 10−7 | 6.534 × 10−7 | 8.108 × 10−7 | 8.712 × 10−7 |
| Autumn | 3.794 × 10−7 | 5.374 × 10−7 | 6.242 × 10−7 | 7.230 × 10−7 |
| Winter | 3.742 × 10−7 | 4.324 × 10−7 | 4.809 × 10−7 | 5.389 × 10−7 |
| Season | Lifetime (year) | |||
|---|---|---|---|---|
| Case 1 | Case 2 | Case 3 | Case 4 | |
| Spring | 32.6 | 23.75 | 20.45 | 17.9 |
| Summer | 28.44 | 18.92 | 15.25 | 14.2 |
| Autumn | 34.03 | 23 | 19.81 | 17.1 |
| Winter | 33.04 | 28.6 | 25.72 | 22.9 |
| Averaged | 32 | 23.6 | 20.3 | 18 |
| Case | Design Accuracy | Lifetime | Size/Weigh |
|---|---|---|---|
| 1 | 80% | 32 year | 460 mm × 260 mm × 494 mm/48.3 kg |
| 2 | 96% | 23.6 year | 460 mm × 260 mm × 490 mm/43.6 kg |
| 3 | 86% | 20.3 year | 460 mm × 260 mm × 449 mm/41.6 kg |
| 4 | 77% | 18 year | 460 mm × 260 mm × 390 mm/38.7 kg |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J.-S.; Choi, U.-M. Comparison of Heat-Pipe Cooling System Design Processes in Railway Propulsion Inverter Considering Power Module Reliability. Energies 2019, 12, 4676. https://doi.org/10.3390/en12244676
Lee J-S, Choi U-M. Comparison of Heat-Pipe Cooling System Design Processes in Railway Propulsion Inverter Considering Power Module Reliability. Energies. 2019; 12(24):4676. https://doi.org/10.3390/en12244676
Chicago/Turabian StyleLee, June-Seok, and Ui-Min Choi. 2019. "Comparison of Heat-Pipe Cooling System Design Processes in Railway Propulsion Inverter Considering Power Module Reliability" Energies 12, no. 24: 4676. https://doi.org/10.3390/en12244676
APA StyleLee, J. -S., & Choi, U. -M. (2019). Comparison of Heat-Pipe Cooling System Design Processes in Railway Propulsion Inverter Considering Power Module Reliability. Energies, 12(24), 4676. https://doi.org/10.3390/en12244676