Robust Nonlinear Predictive Current Control Techniques for PMSM

Abstract
:1. Introduction
2. Nonlinear PMSM Model
Machine Model Description
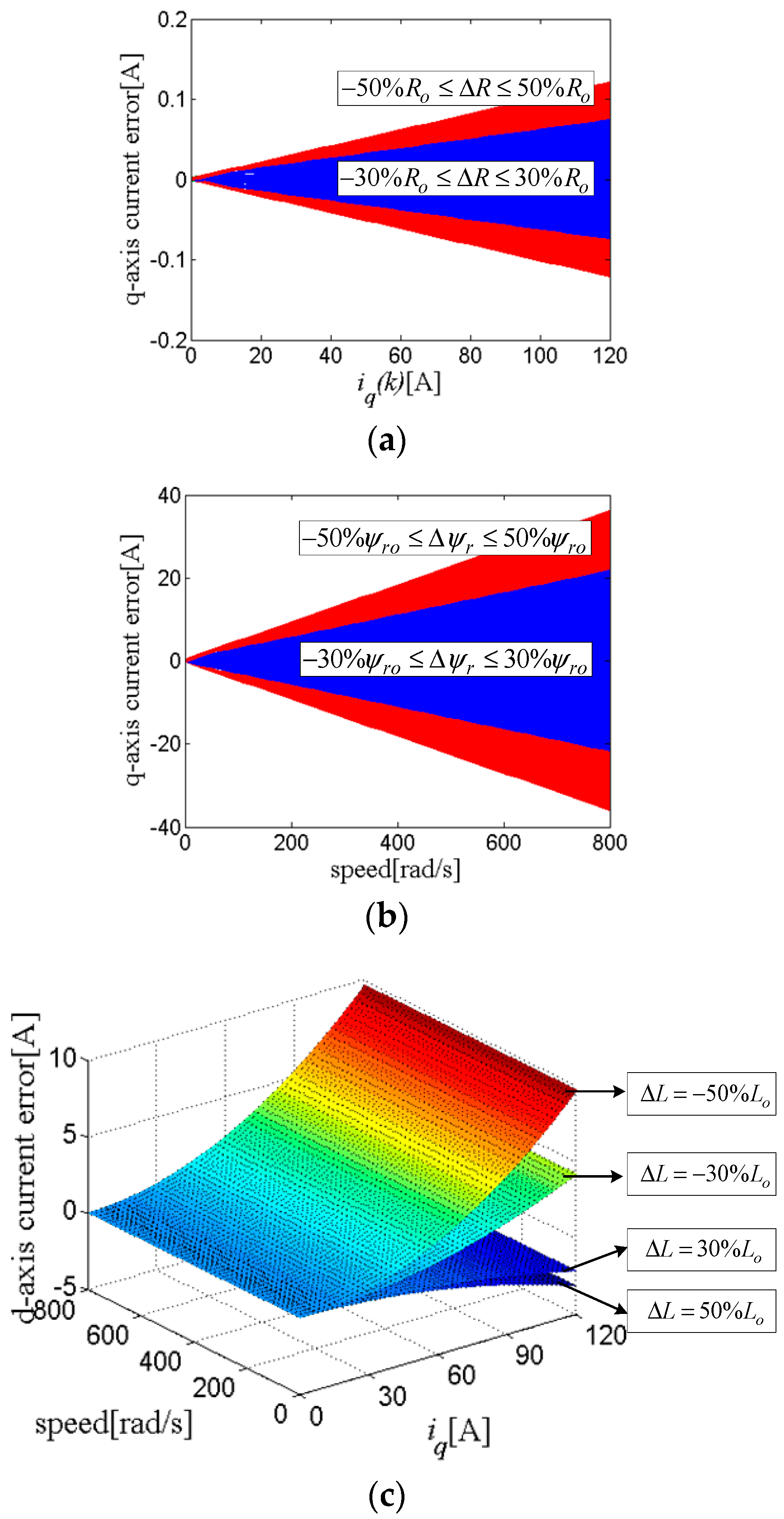
3. Parameter Sensitivity Analysis of Conventional PCC
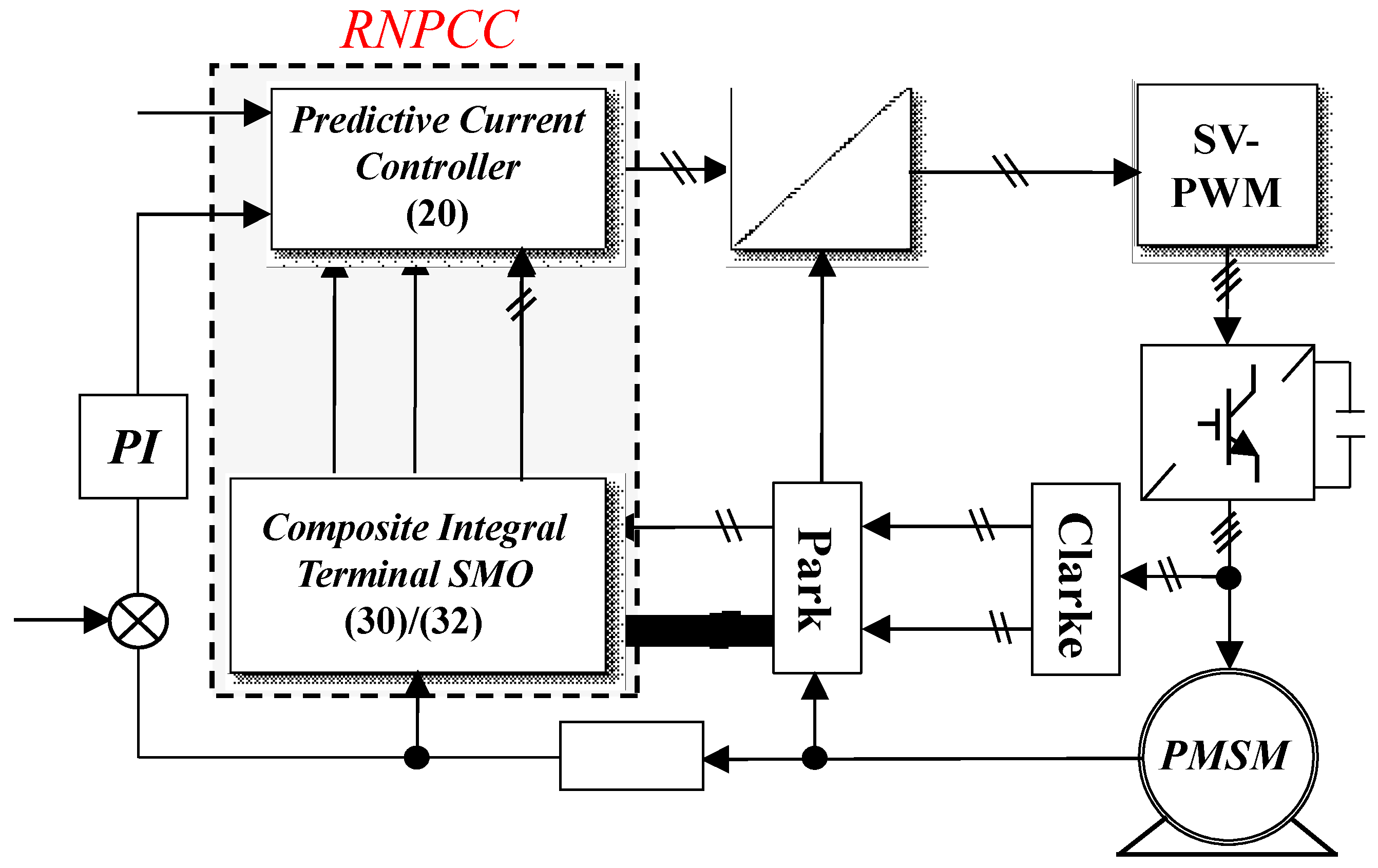
4. Design of the RNPCC
4.1. Design of the Optimal Control Law
4.2. Design of the RNPCC
5. Design of the Composite Integral Terminal SMO
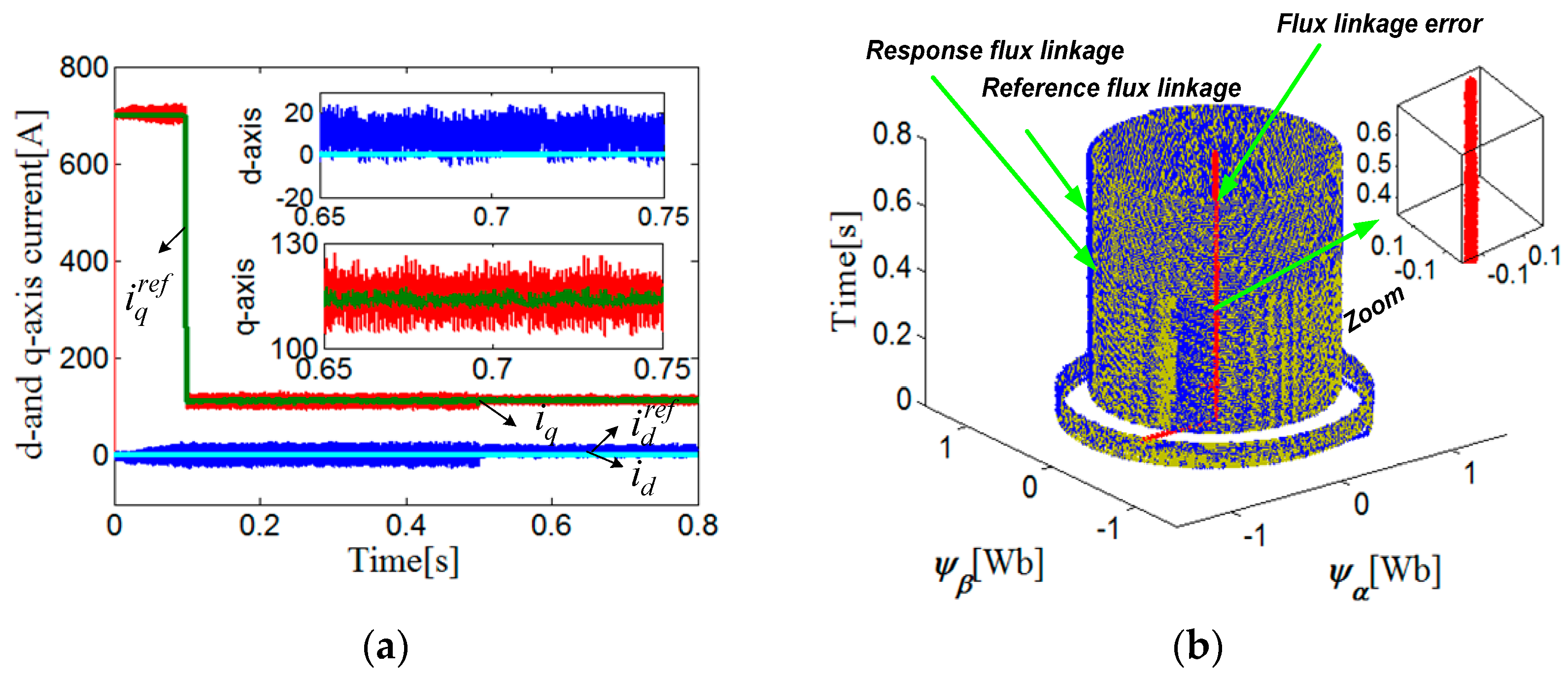
6. Simulations
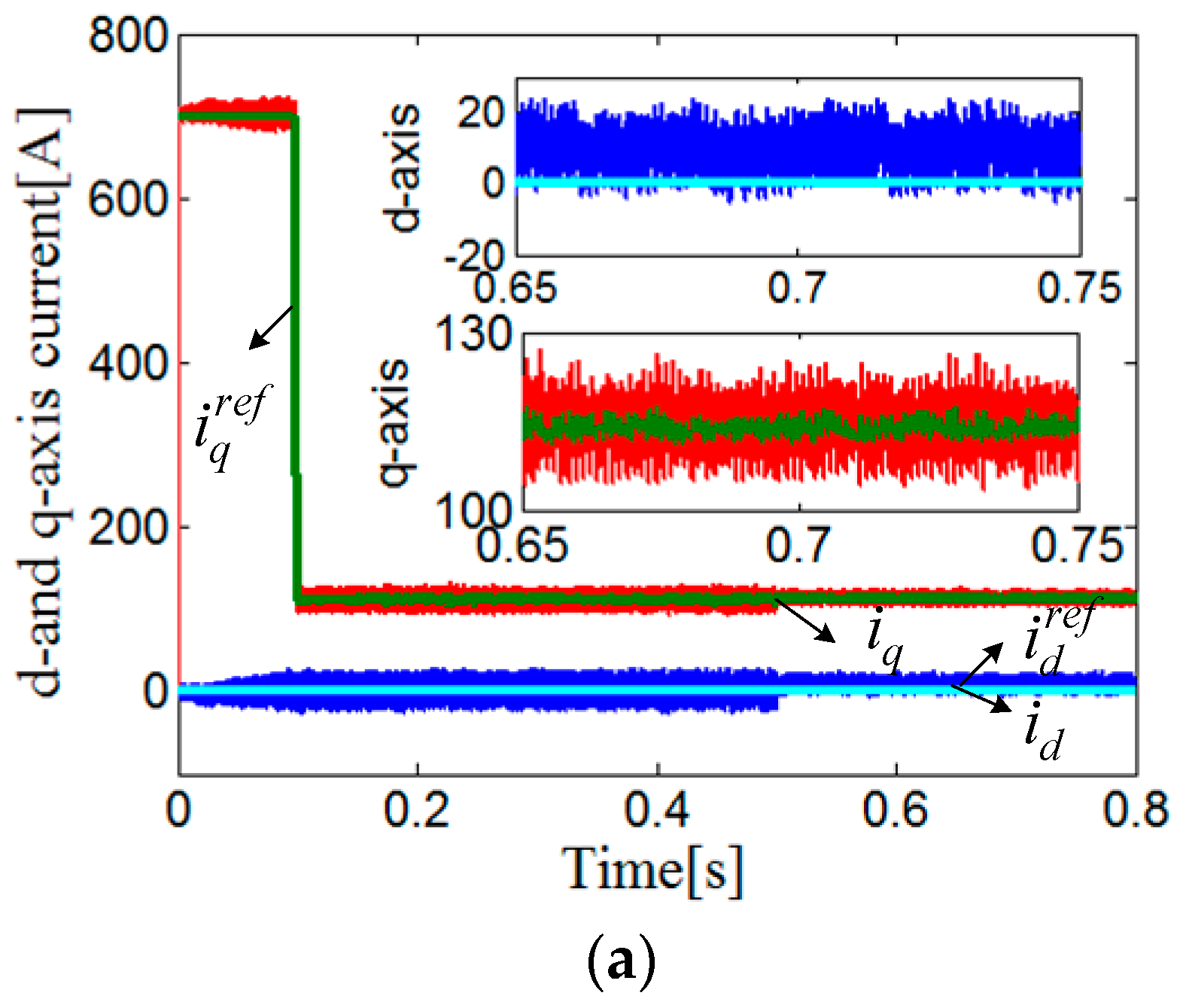
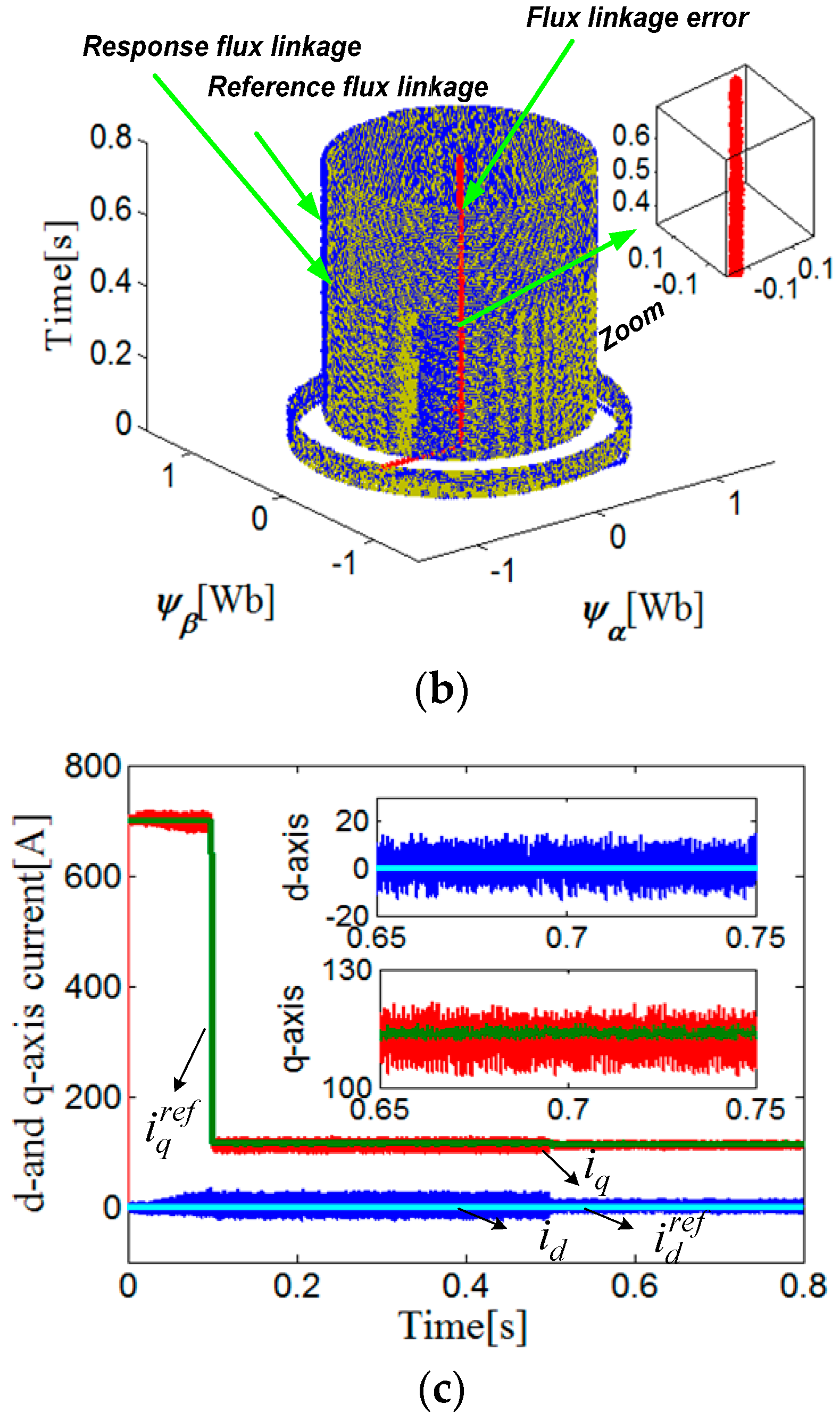
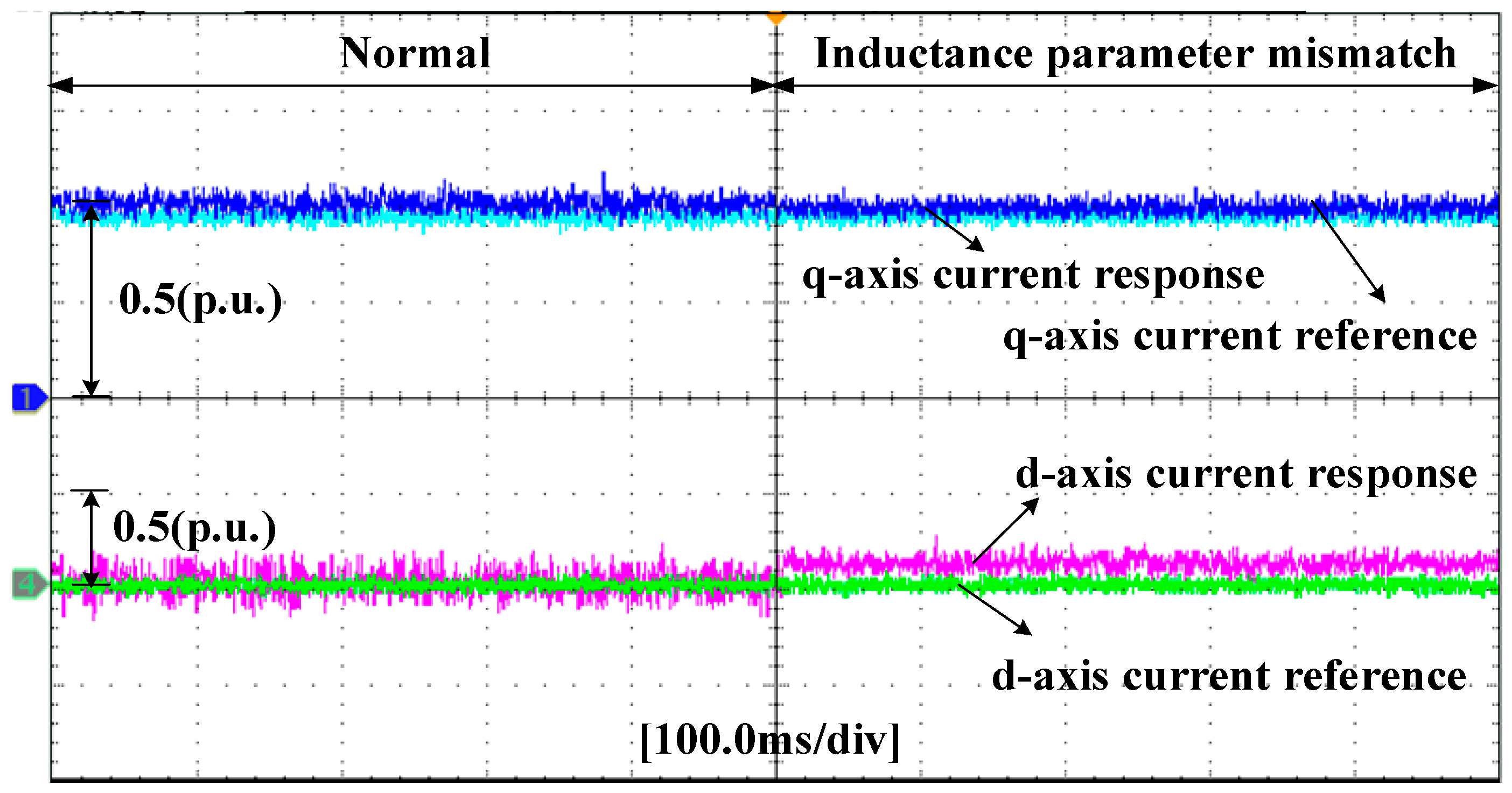
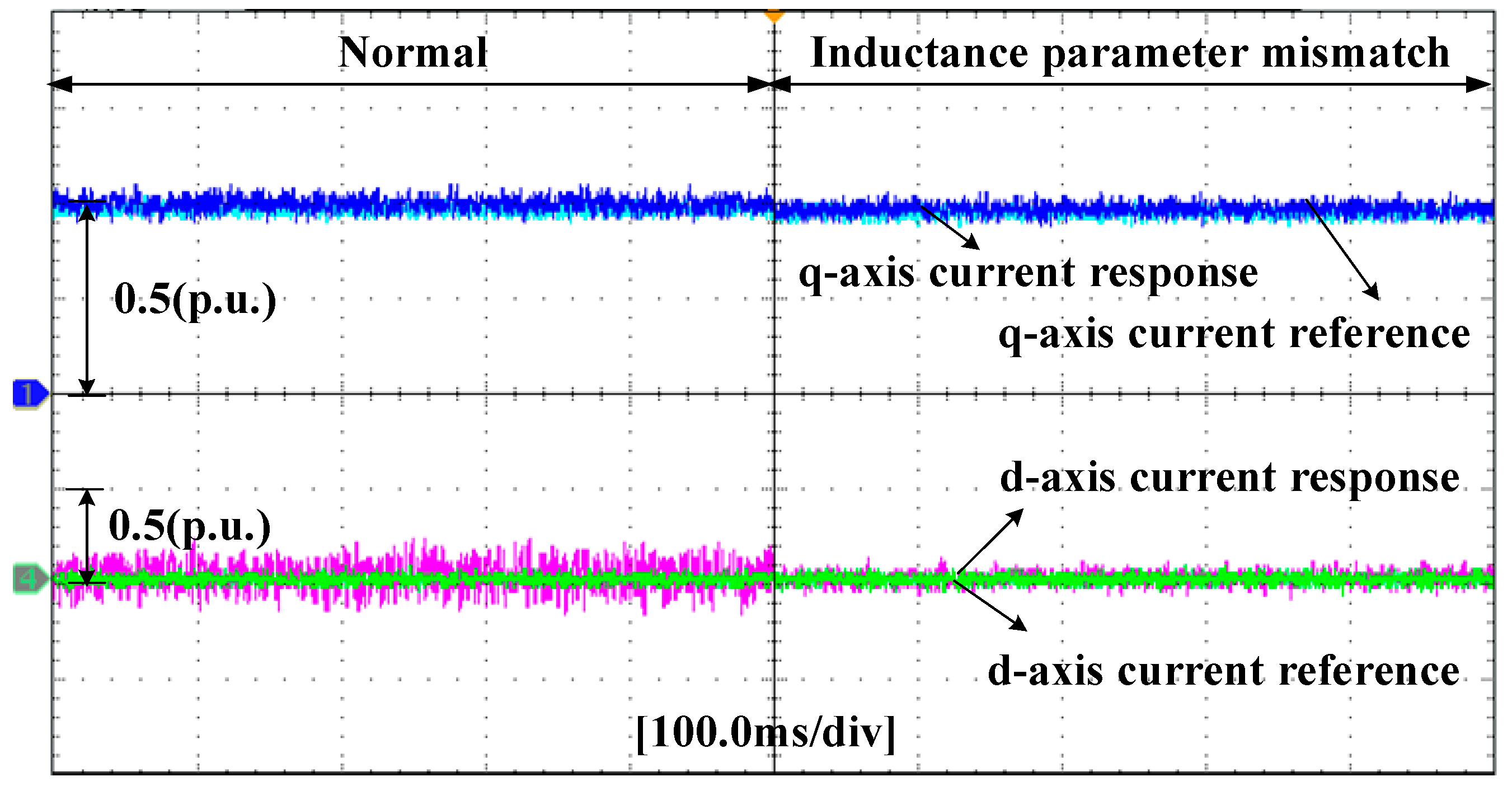
6.1. Performance Comparison of Conventional PCC and Proposed RNPCC under Inductance Parameter Perturbation
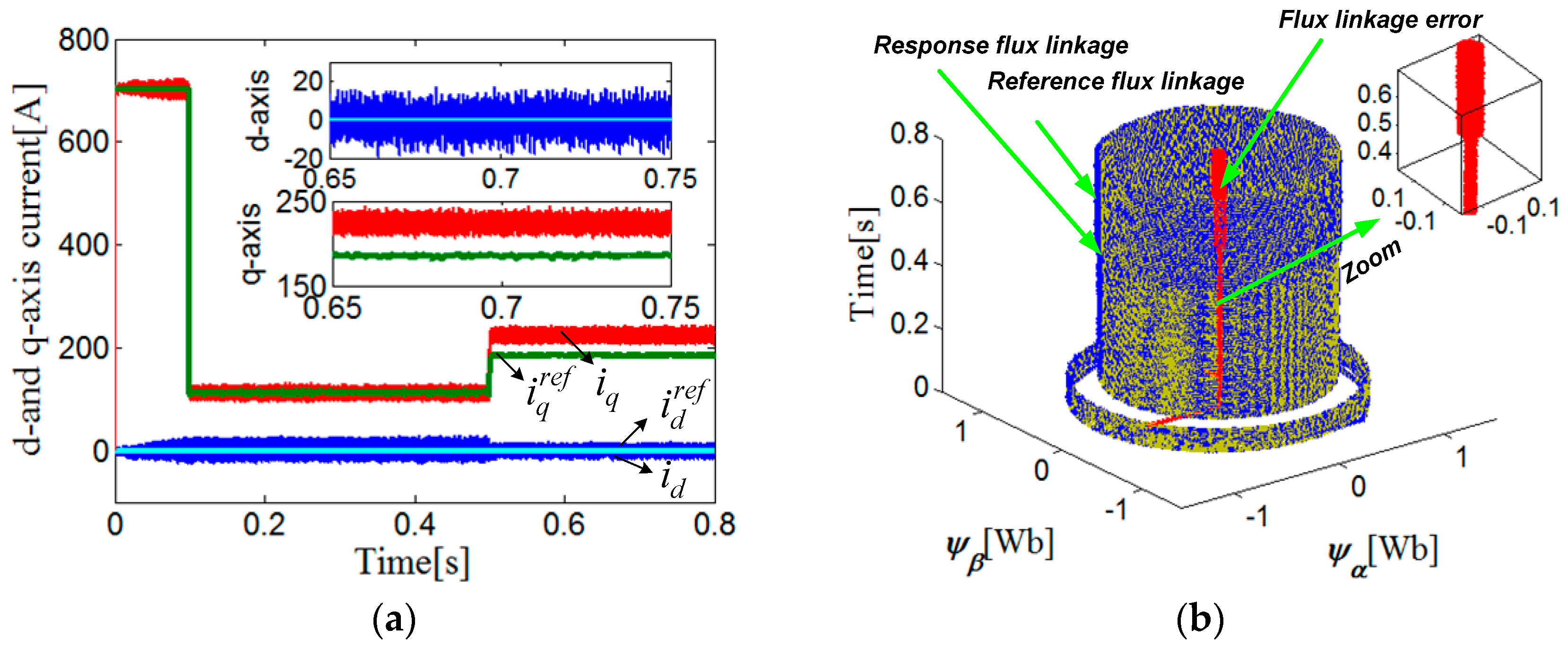
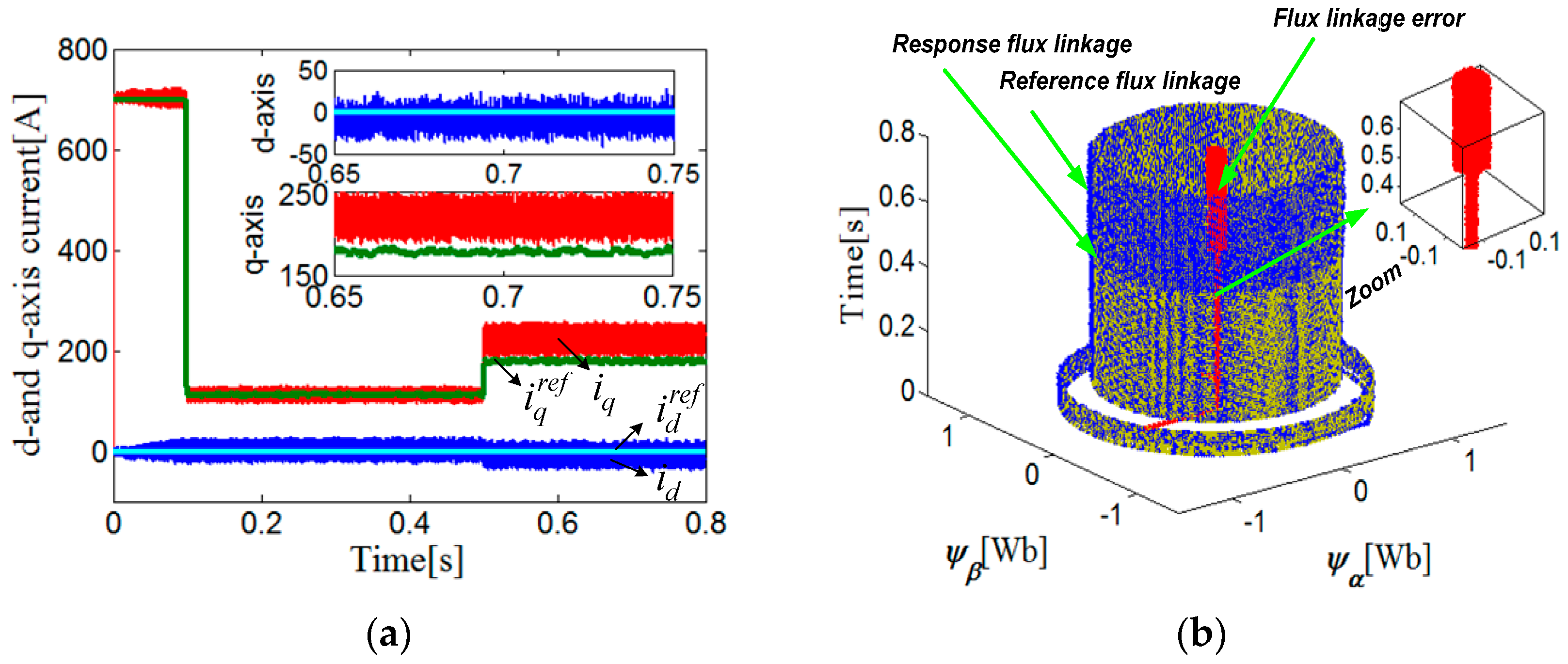
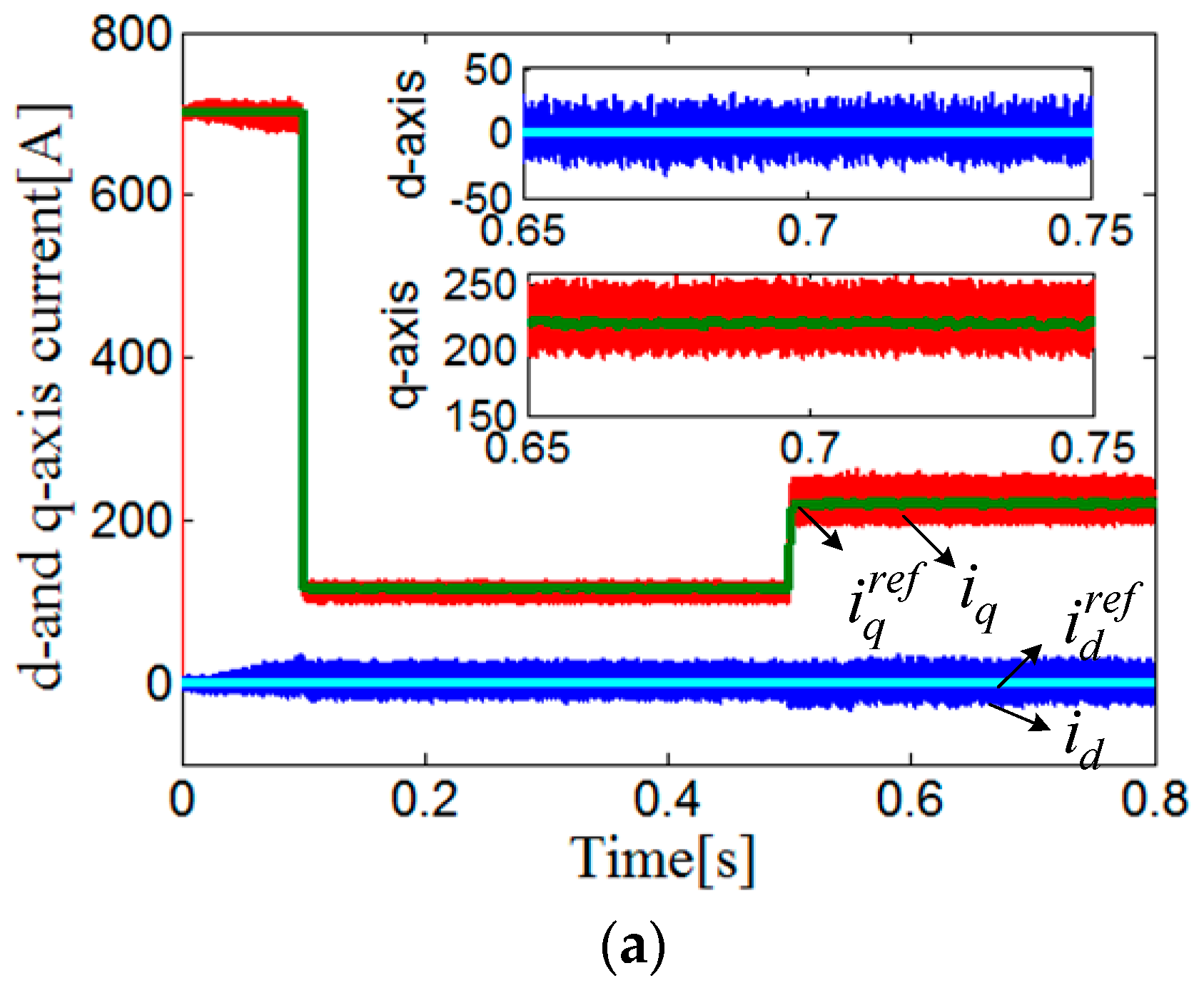
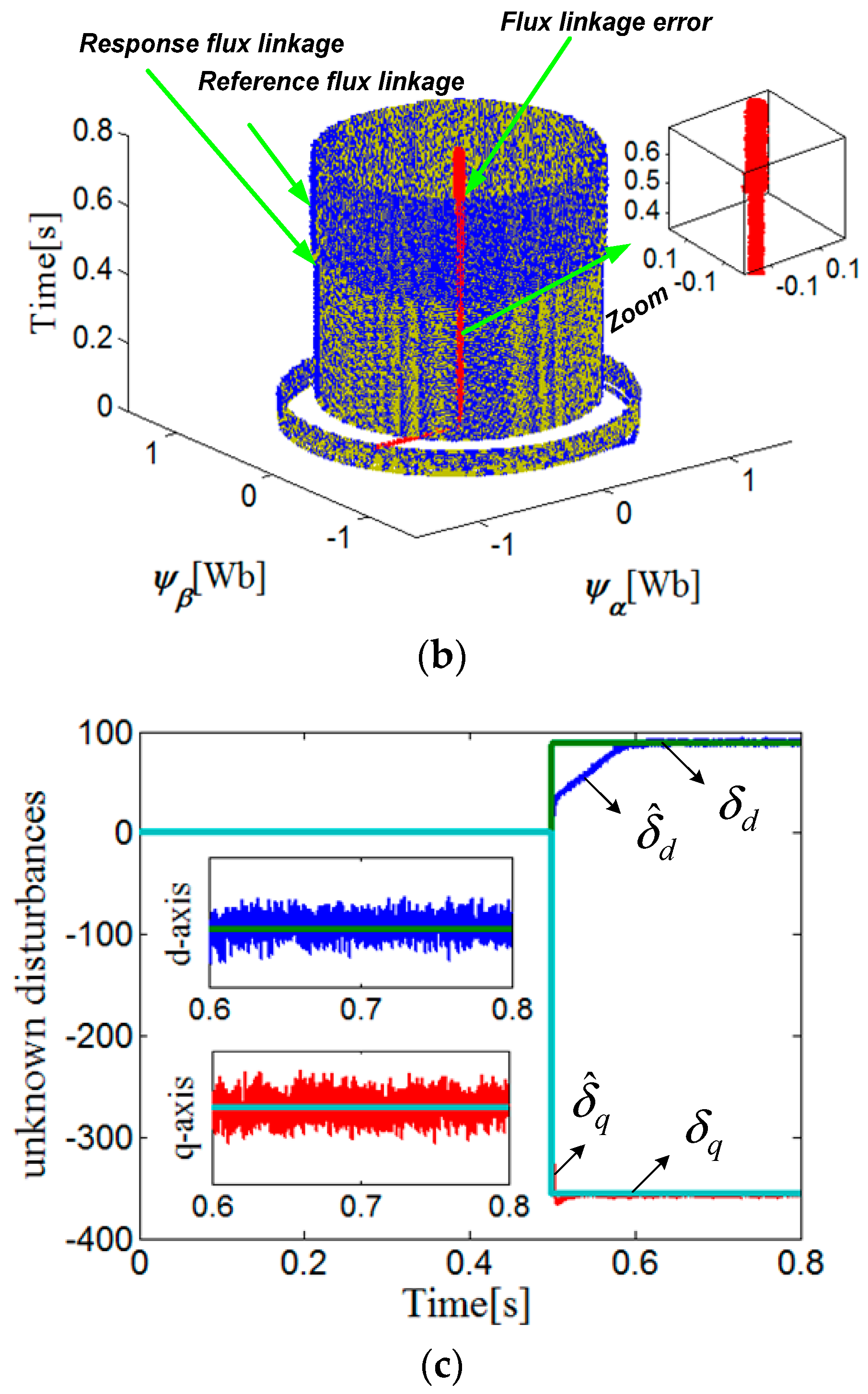
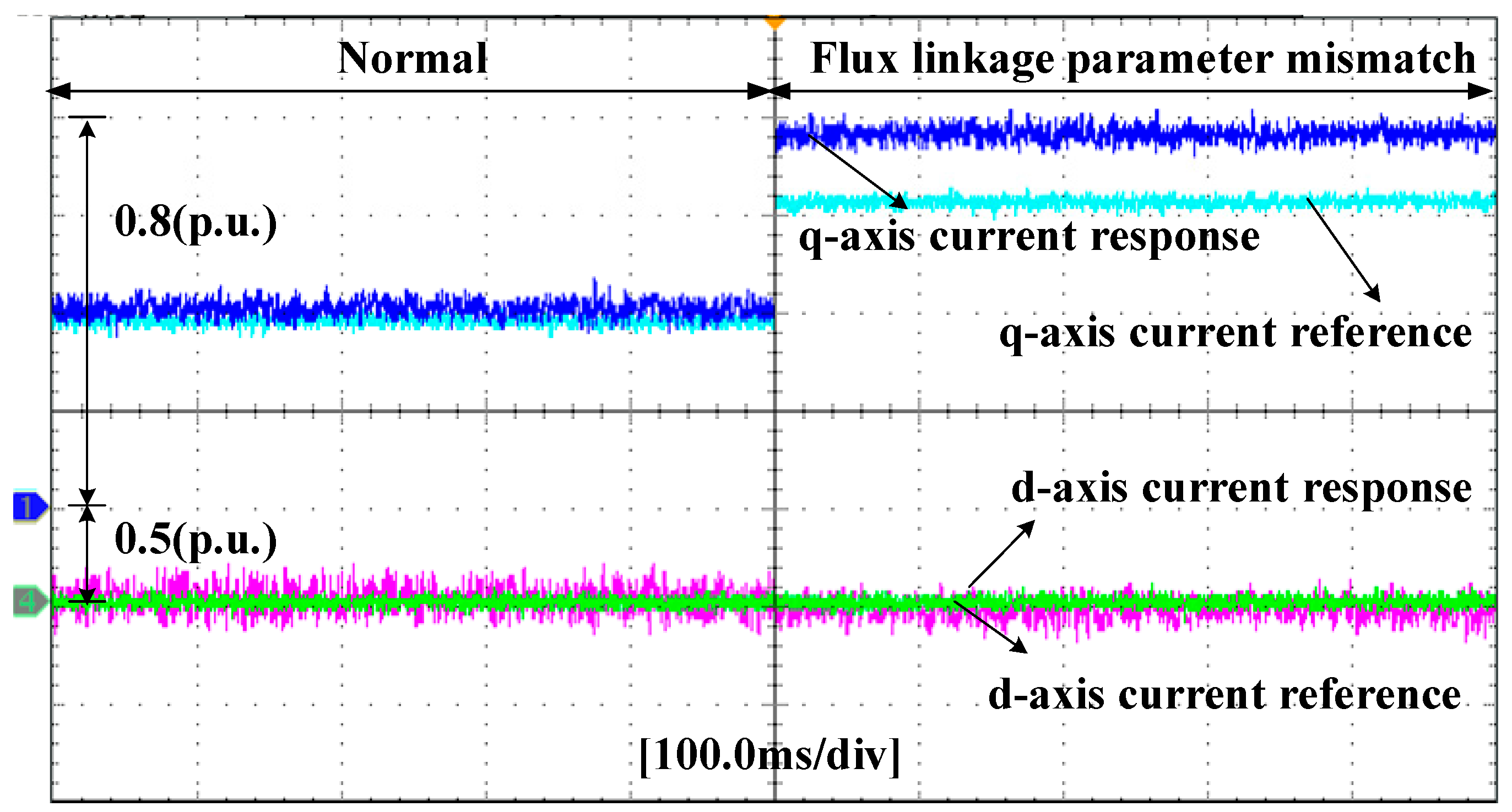
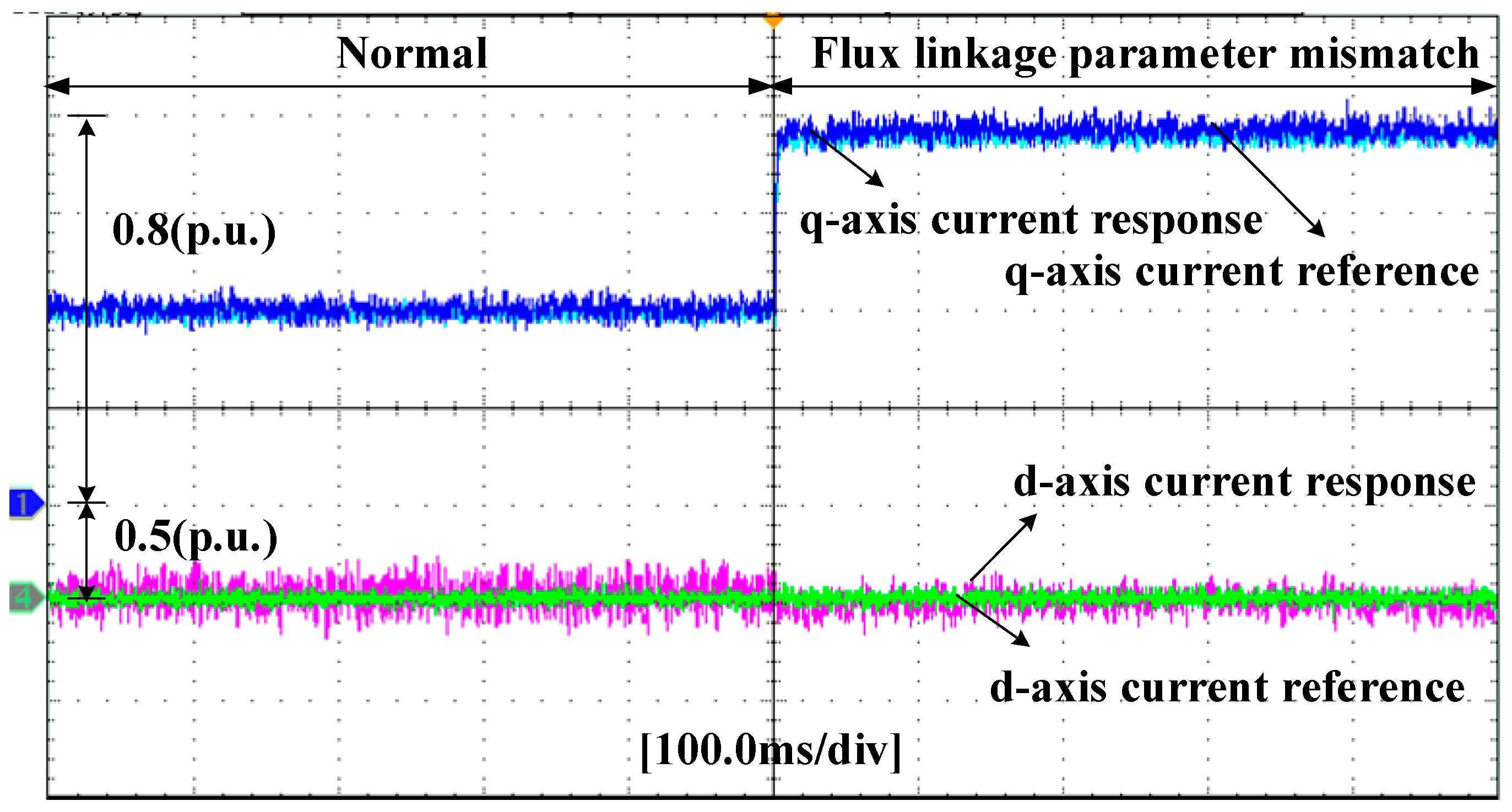
6.2. Performance Comparison of Conventional PCC and Proposed RNPCC under Flux Linkage Parameter Perturbation
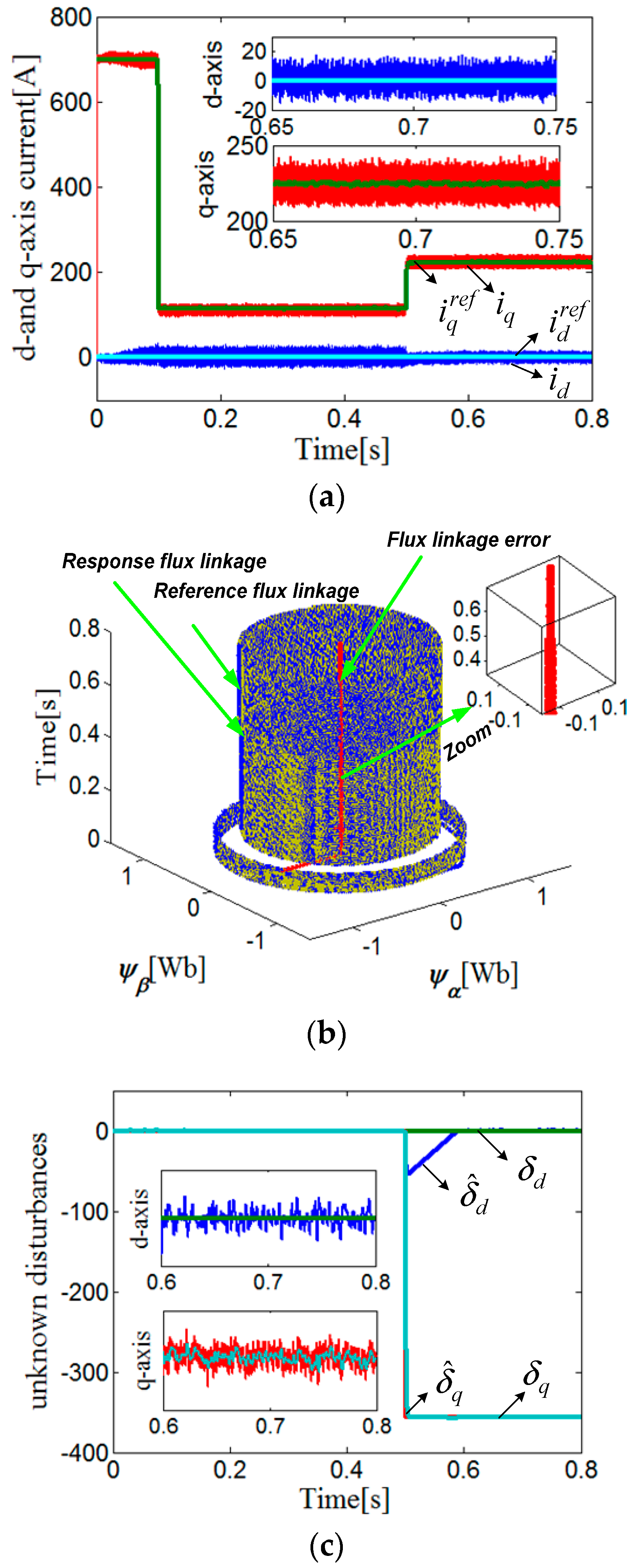
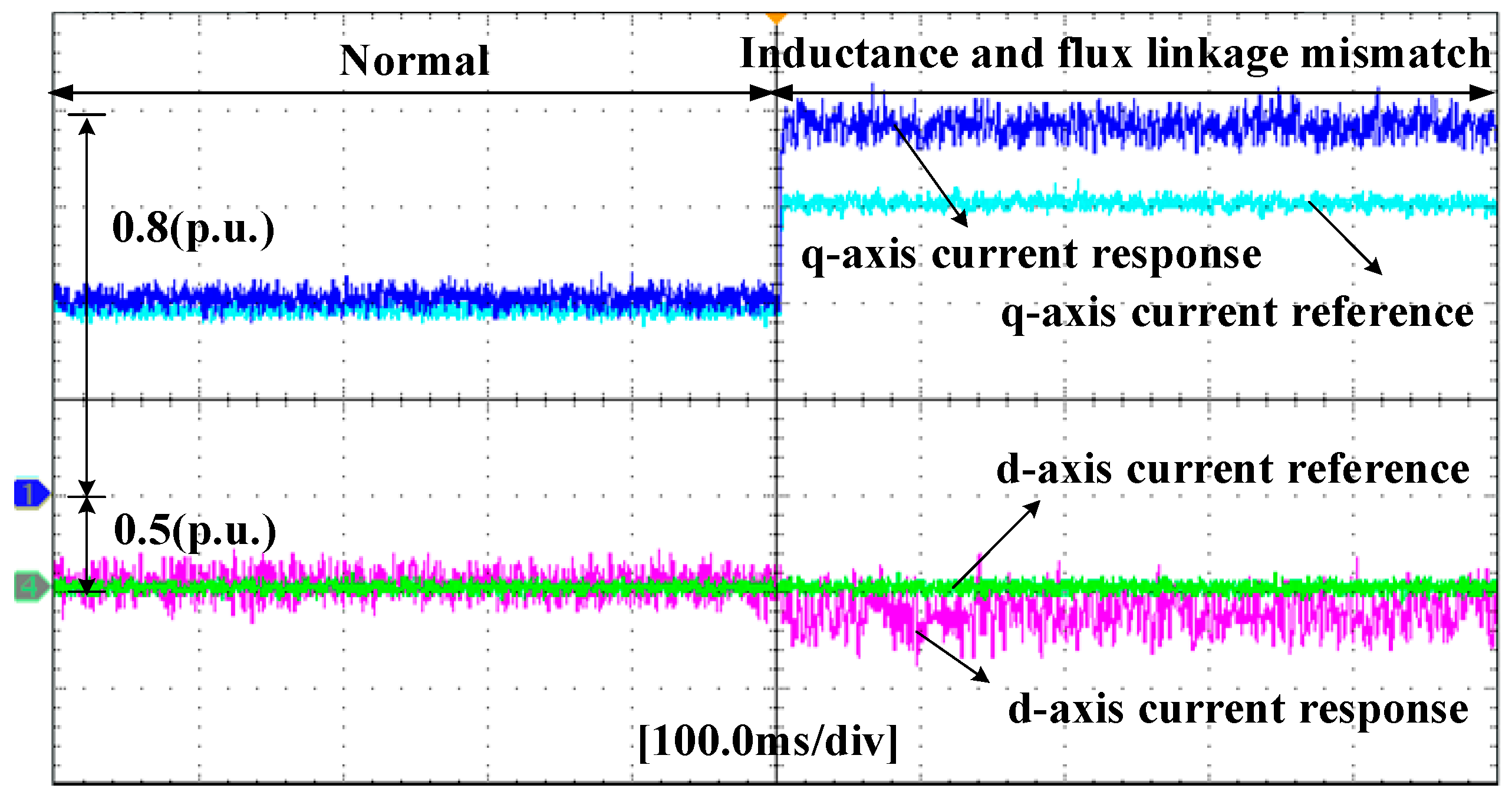
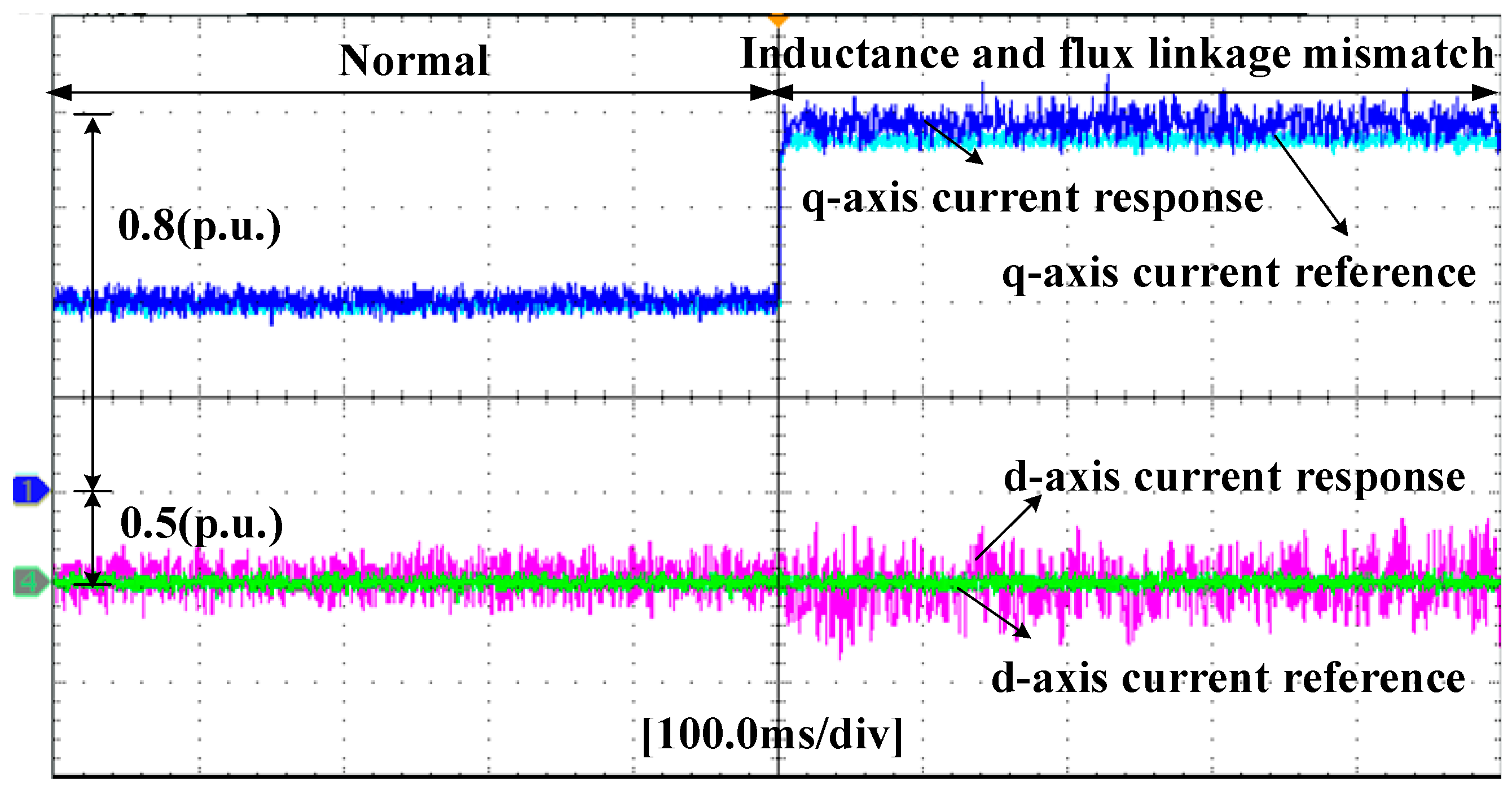
6.3. Performance Comparison of Conventional PCC and Proposed RNPCC under Inductance and Flux Linkage Parameter Perturbation
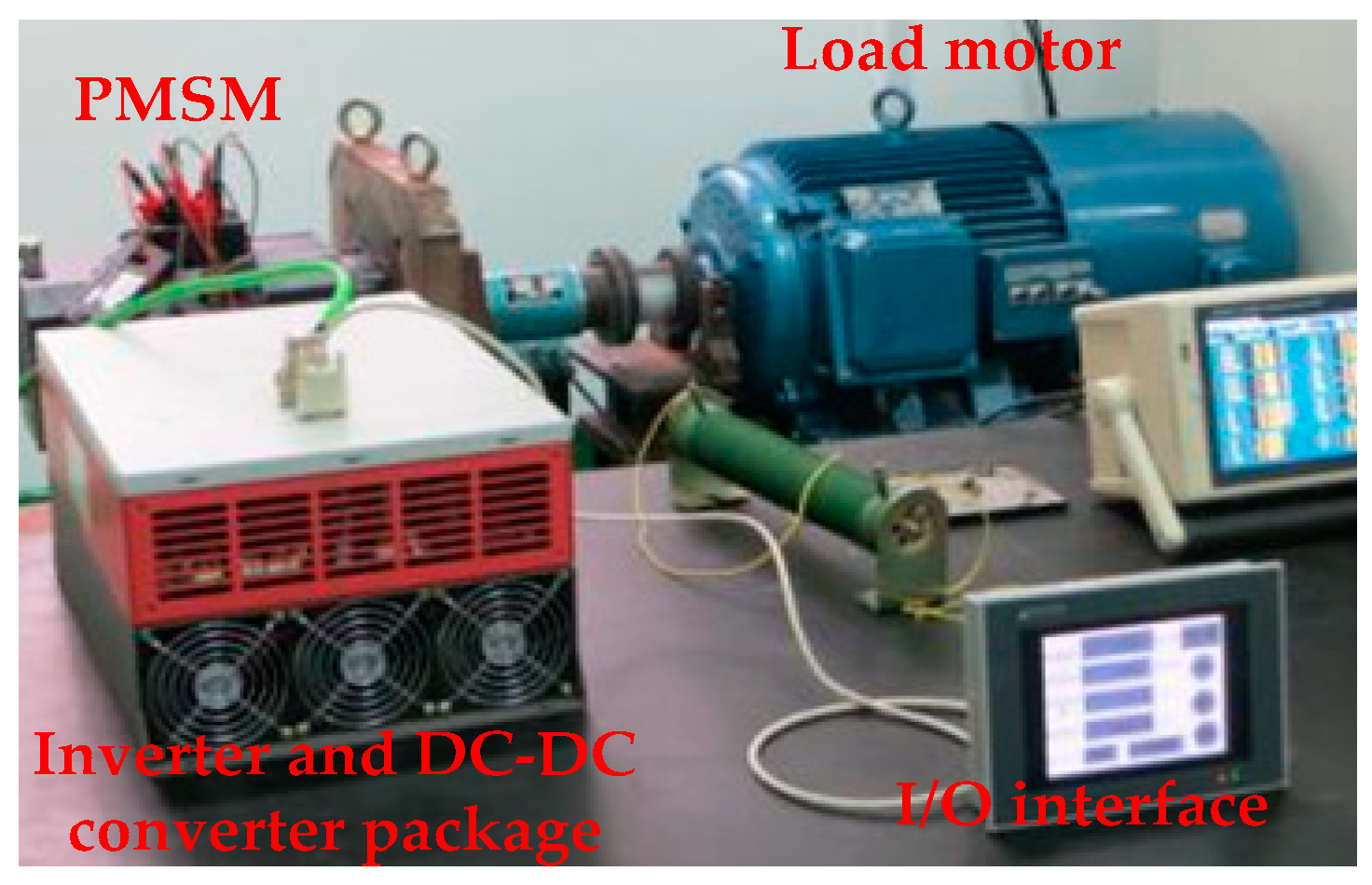
7. Experimental Results
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Consoli, A.; Scarcella, G.; Testa, A. Slip-frequency detection for indirect field-oriented control drives. IEEE Trans. Ind. Electron. 2004, 40, 194–201. [Google Scholar] [CrossRef]
- Qian, W.; Panda, S.K.; Xu, J.X. Torque ripple minimization in PM synchronous motors using iterative learning control. IEEE Trans. Power Electron. 2004, 19, 272–279. [Google Scholar] [CrossRef]
- Wang, B.; Chen, X.; Yu, Y.; Wang, G.; Xu, D. Robust predictive current control with online disturbance estimation for induction machine drives. IEEE Trans. Power Electron. 2017, 32, 4663–4674. [Google Scholar] [CrossRef]
- Zoghlami, M.; Kadri, A.; Bacha, F. Analysis and Application of the Sliding Mode Control Approach in the Variable-Wind Speed Conversion System for the Utility of Grid Connection. Energies 2018, 11, 720. [Google Scholar] [CrossRef]
- Stojic, D.M.; Milinkovic, M.; Veinovic, S.; Klasnic, I. Stationary frame induction motor feed forward current controller with back EMF compensation. IEEE Trans. Power Electron. 2015, 30, 1356–1366. [Google Scholar] [CrossRef]
- Yan, L.; Dou, M.; Hua, Z. Disturbance Compensation-Based Model Predictive Flux Control of SPMSM with Optimal Duty Cycle. IEEE J. Emerg. Sel. Top. Power Electron. 2018. [Google Scholar] [CrossRef]
- Carpiuc, S.C.; Lazar, C. Fast real-time constrained predictive current control in permanent magnet synchronous machine-based automotive traction drives. IEEE Trans. Tran. Electrif. 2015, 1, 326–335. [Google Scholar] [CrossRef]
- Cortes, P.; Rodriguez, J.; Silva, C.; Flores, A. Delay Compensation in Model Predictive Current Control of a Three-Phase Inverter. IEEE Trans. Ind. Electron. 2012, 59, 1323–1325. [Google Scholar] [CrossRef]
- Lim, C.S.; Levi, E.; Jones, M.; Rahim, N.A.; Hew, W.P. FCSMPC- Based Current Control of a Five-Phase Induction Motor and its Comparison with PI-PWM Control. IEEE Trans. Ind. Electron. 2016, 61, 149–163. [Google Scholar] [CrossRef]
- Chen, Z.; Qiu, J.; Jin, M. Prediction-Error-Driven Position Estimation Method for Finite Control Set Model Predictive Control of Interior Permanent Magnet Synchronous Motors. IEEE J. Emerg. Sel. Top. Power Electron. 2018. [Google Scholar] [CrossRef]
- Wipasuramonton, P.; Zhu, Z.Q.; Howe, D. Predictive current control with current-error correction for PM brushless AC drives. IEEE Trans. Ind. Appl. 2006, 42, 1071–1079. [Google Scholar] [CrossRef]
- Siami, M.; Khaburi, D.A.; Abbaszadeh, A.; Rodríguez, J. Robustness improvement of predictive current control using prediction error correction for permanent-magnet synchronous machines. IEEE Trans. Ind. Electron. 2016, 63, 3458–3466. [Google Scholar] [CrossRef]
- Le-Huy, H.; Slimani, K.; Viarouge, P. Analysis and implementation of a real-time predictive current controller for permanent-magnet synchronous servo drives. IEEE Trans. Ind. Electron. 1994, 41, 110–117. [Google Scholar] [CrossRef]
- Yang, M.; Lang, X.; Long, J.; Xu, D. Flux immunity robust predictive current control with incremental model and extended state observer for PMSM drive. IEEE Trans. Power Electron. 2017, 32, 9267–9279. [Google Scholar] [CrossRef]
- Zhang, X.; Hou, B.; Mei, Y. Deadbeat Predictive Current Control of Permanent-Magnet Synchronous Motors with Stator Current and Disturbance Observer. IEEE Trans. Power Electron. 2017, 32, 3818–3834. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.M.; Zhang, Z.; Kennel, R. Robust Predictive Control for Direct-Driven Surface-Mounted Permanent-Magnet Synchronous Generators Without Mechanical Sensors. IEEE Trans. Energy Conv. 2018, 33, 179–189. [Google Scholar] [CrossRef]
- Zhang, C.; Wu, G.; Fei, R.; Feng, J.H.; Jia, L. Robust Fault-Tolerant Predictive Current Control for Permanent Magnet Synchronous Motors Considering Demagnetization Fault. IEEE Trans. Ind. Electron. 2018, 65, 5324–5334. [Google Scholar] [CrossRef]
- Yang, J.; Zheng, W.X.; Li, S.; Wu, B.; Cheng, M. Design of a prediction-accuracy-enhanced continuous-time MPC for disturbed systems via a disturbance observer. IEEE Trans. Ind. Electron. 2015, 62, 5807–58164. [Google Scholar] [CrossRef]
- Yang, J.; Li, S.; Yu, X. Sliding-mode control for systems with mismatched uncertainties via a disturbance observer. IEEE Trans. Ind. Electron. 2013, 60, 160–169. [Google Scholar] [CrossRef]
- Yang, J.; Zheng, W.X. Offset-free nonlinear MPC for mismatched disturbance attenuation with application to a static var compensator. IEEE Trans. Circuits Syst. II Express Br. 2014, 61, 49–53. [Google Scholar] [CrossRef]
- Hu, F.; Luo, D.; Luo, C.; Long, Z.; Wu, G. Cascaded Robust Fault-Tolerant Predictive Control for PMSM Drives. Energies 2018, 11, 3087. [Google Scholar] [CrossRef]
- Richter, J.; Doppelbauer, M. Predictive trajectory control of permanent-magnet synchronous machines with nonlinear magnetic. IEEE Trans. Ind. Electron. 2016, 63, 3915–3924. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Rated power | 125 kW |
| Rated speed | 2000 r/min |
| Rate torque | 600 N·m |
| Stator phase resistance (Ro) | 0.02 Ω |
| Number of pole pairs (np) | 4 |
| Inductance (Lo) | 1 mH |
| Flux linkage of PM (Ψro) | 0.892 Wb |
| Rotational inertia (J) | 1.57 kg·m2 |
| Steady State | Current Errors | Controller Type | |
|---|---|---|---|
| Parameter Perturbation | Conventional PCC | Proposed RNPCC | |
| Inductance | ±(id ref − id) | ±17 A | ±0.8 A |
| Parameter Perturbation | ±(iq ref − iq) | ±1.4 A | ±1.2 A |
| Flux Linkage | ±(id ref − id) | ±0.7 A | ±0.4 A |
| Parameter Perturbation | ±(iq ref − iq) | ±55 A | ±2 A |
| Inductance and Flux Linkage | ±(id ref − id) | ±18 A | ±1.3 A |
| Parameter Perturbation | ±(iq ref − iq) | ±47 A | ±0.7 A |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lyu, M.; Wu, G.; Luo, D.; Rong, F.; Huang, S. Robust Nonlinear Predictive Current Control Techniques for PMSM. Energies 2019, 12, 443. https://doi.org/10.3390/en12030443
Lyu M, Wu G, Luo D, Rong F, Huang S. Robust Nonlinear Predictive Current Control Techniques for PMSM. Energies. 2019; 12(3):443. https://doi.org/10.3390/en12030443
Chicago/Turabian StyleLyu, Mingcheng, Gongping Wu, Derong Luo, Fei Rong, and Shoudao Huang. 2019. "Robust Nonlinear Predictive Current Control Techniques for PMSM" Energies 12, no. 3: 443. https://doi.org/10.3390/en12030443
APA StyleLyu, M., Wu, G., Luo, D., Rong, F., & Huang, S. (2019). Robust Nonlinear Predictive Current Control Techniques for PMSM. Energies, 12(3), 443. https://doi.org/10.3390/en12030443