Fast and Accurate Model of Interior Permanent-Magnet Machine for Dynamic Characterization


Abstract
:1. Introduction
2. Two-Axis IPM Models
2.1. General Equations
2.2. Linear Model
2.2.1. CM
2.2.2. FLM
2.3. Nonlinear Model
2.3.1. CM
2.3.2. FLM
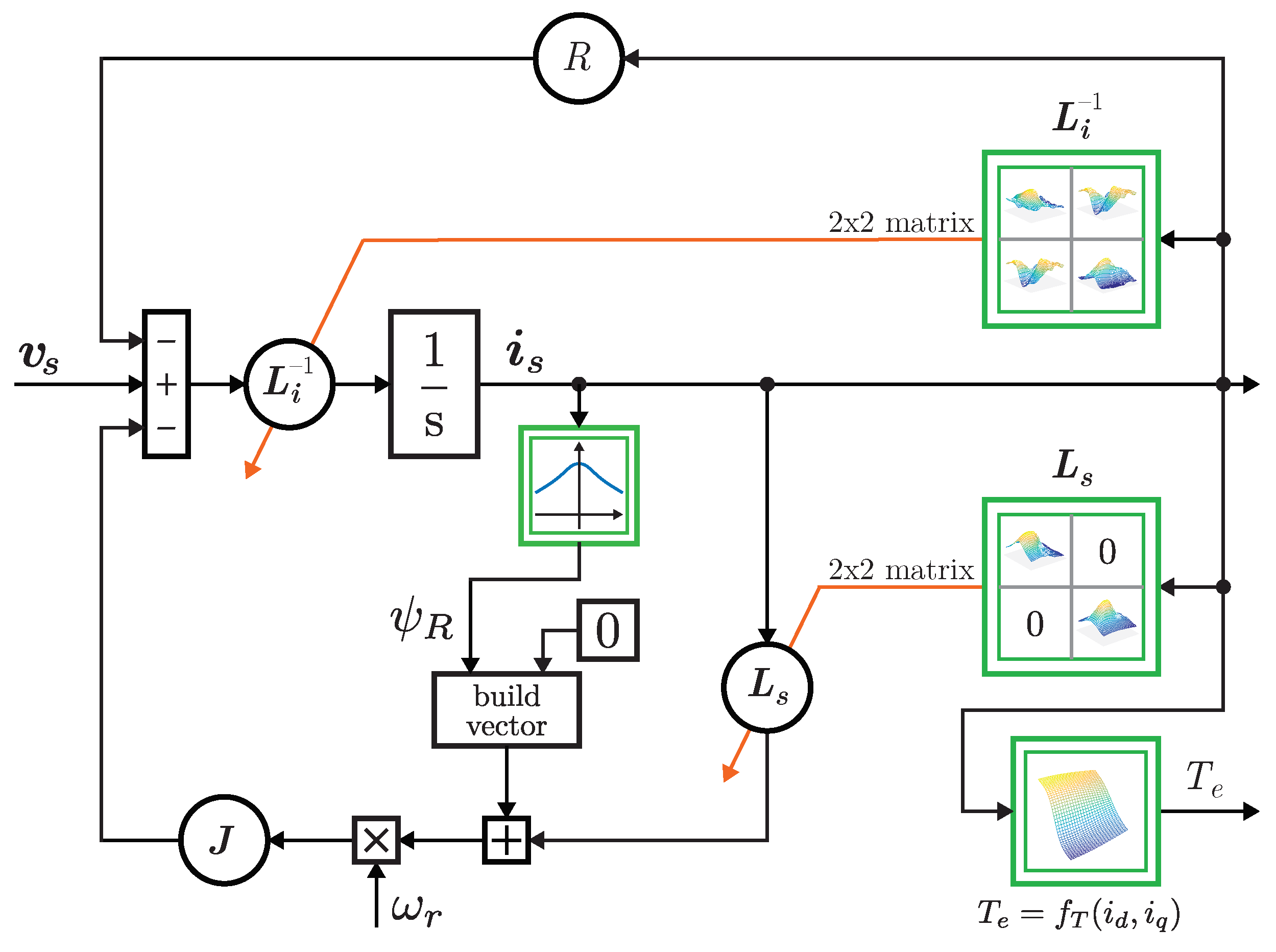
2.4. Simulation Form
3. Model Parameterization
3.1. Static FEA Batch Simulation
3.2. CM Parameterization
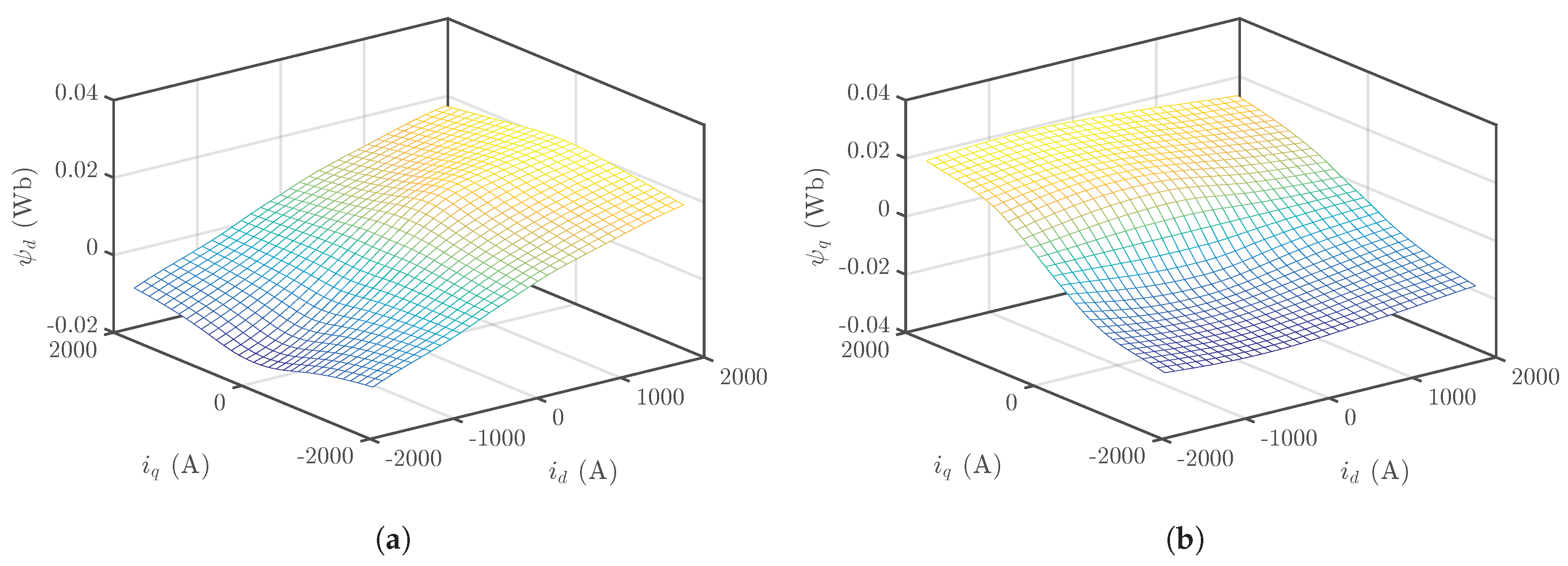
3.3. FLM Parameterization
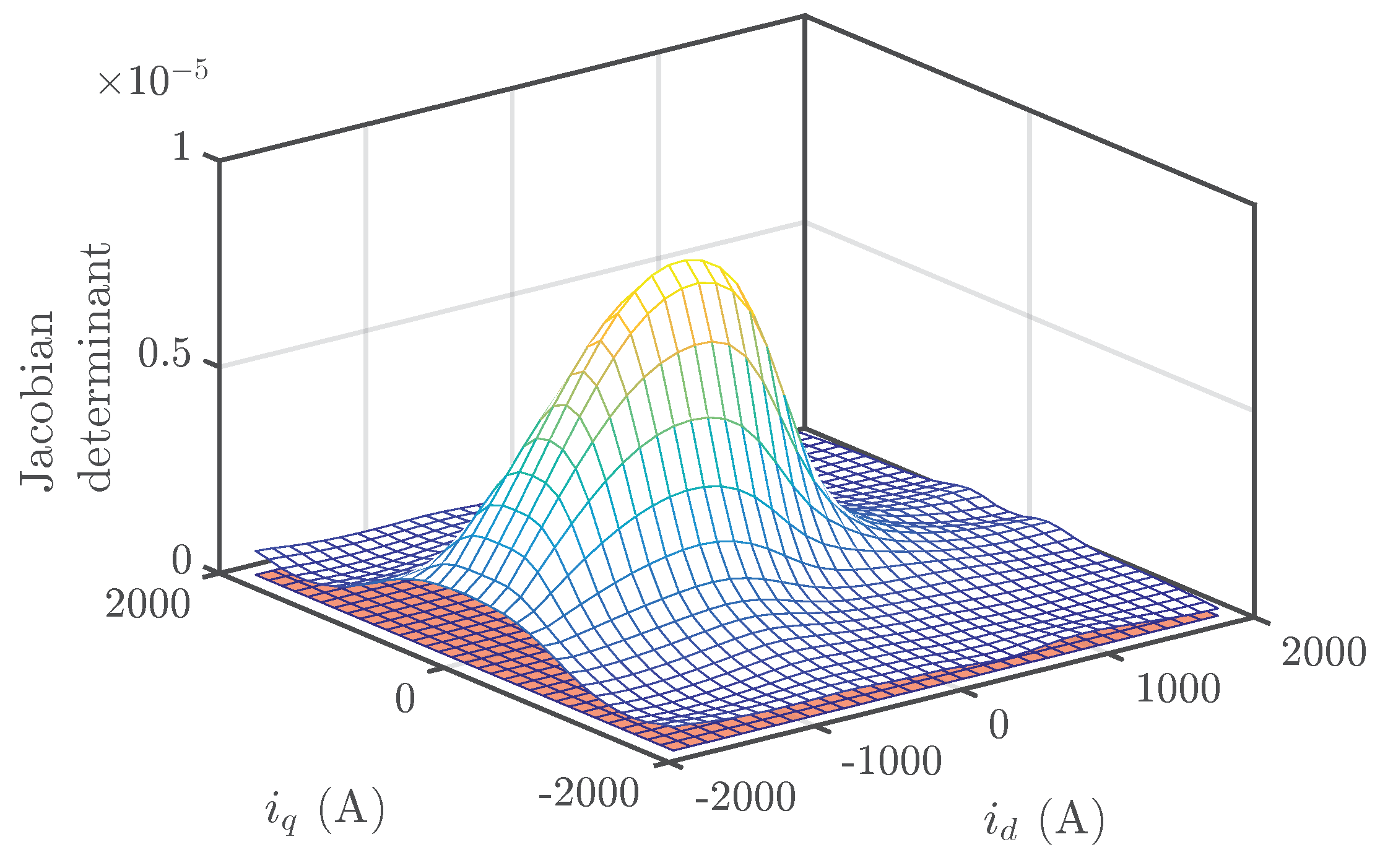
3.3.1. Inversion via Minimization
3.3.2. Inversion via Intersections
| Algorithm 1 Inverse flux map via intersection. |
|
4. CM and FLM Performance Comparison
4.1. Model Verification
4.2. Parameterization Time
4.3. Execution Time
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| IPM | Interior permanent magnet synchronous machine |
| FLM | Flux-linkage model |
| CM | Current model |
| FEA | Finite-element analysis |
| SCT | Short-circuit test |
| WLTC | Worldwide harmonized light vehicles test cycle |
References
- EL-Refaie, A.M. Fractional-Slot Concentrated-Windings Synchronous Permanent Magnet Machines: Opportunities and Challenges. IEEE Trans. Ind. Electron. 2010, 57, 107–121. [Google Scholar] [CrossRef]
- Hu, Y.; Zhu, S.; Liu, C.; Wang, K. Electromagnetic Performance Analysis of Interior PM Machines for Electric Vehicle Applications. IEEE Trans. Energy Convers. 2018, 33, 199–208. [Google Scholar] [CrossRef]
- Carraro, E.; Bianchi, N. Design and comparison of interior permanent magnet synchronous motors with non-uniform airgap and conventional rotor for electric vehicle applications. IET Electr. Power Appl. 2014, 8, 240–249. [Google Scholar] [CrossRef]
- Pellegrino, G.; Vagati, A.; Guglielmi, P.; Boazzo, B. Performance Comparison Between Surface-Mounted and Interior PM Motor Drives for Electric Vehicle Application. IEEE Trans. Ind. Electron. 2012, 59, 803–811. [Google Scholar] [CrossRef]
- Torrent, M.; Perat, J.I.; Jiménez, J.A. Permanent Magnet Synchronous Motor with Different Rotor Structures for Traction Motor in High Speed Trains. Energies 2018, 11. [Google Scholar] [CrossRef]
- Pellegrino, G.; Jahns, T.M.; Bianchi, N.; Soong, W.; Cupertino, F. The Rediscovery of Synchronous Reluctance and Ferrite Permanent Magnet Motors: Tutorial Course Notes; Springer: Basel, Switzerland, 2016. [Google Scholar] [CrossRef]
- Germishuizen, J.J.; Kamper, M.J. IPM Traction Machine With Single Layer Non-Overlapping Concentrated Windings. IEEE Trans. Ind. Appl. 2009, 45, 1387–1394. [Google Scholar] [CrossRef]
- Germishuizen, J.J.; Stanton, S.; Delafosse, V. Integrating FEM in an everyday design environment to accurately calculate the performance of IPM motors. In Proceedings of the 2009—XIV International Symposium on Electromagnetic Fields in Mechatronics, Electrical and Electronic Engineering (ISEF), Arras, France, 10–12 September 2009. [Google Scholar]
- Li, L.; Li, W.; Li, D.; Li, J.; Fan, Y. Research on Strategies and Methods Suppressing Permanent Magnet Demagnetization in Permanent Magnet Synchronous Motors Based on a Multi-Physical Field and Rotor Multi-Topology Structure. Energies 2018, 11. [Google Scholar] [CrossRef]
- Liu, X.; Lin, Q.; Fu, W. Optimal Design of Permanent Magnet Arrangement in Synchronous Motors. Energies 2017, 10, 1700. [Google Scholar] [CrossRef]
- Liu, Y.X.; Li, L.Y.; Cao, J.W.; Gao, Q.H.; Sun, Z.Y.; Zhang, J.P. The Optimization Design of Short-Term High-Overload Permanent Magnet Motors Considering the Nonlinear Saturation. Energies 2018, 11, 3272. [Google Scholar] [CrossRef]
- Pries, J.; Burress, T. High fidelity D-Q modeling of synchronous machines using spectral interpolation. In Proceedings of the 2017 IEEE Transportation Electrification Conference and Expo (ITEC), Chicago, IL, USA, 26–28 June 2017; pp. 779–785. [Google Scholar] [CrossRef]
- Alvarez-Gonzalez, F.; Griffo, A.; Sen, B.; Wang, J. Real-Time Hardware-in-the-Loop Simulation of Permanent-Magnet Synchronous Motor Drives Under Stator Faults. IEEE Trans. Ind. Electron. 2017, 64, 6960–6969. [Google Scholar] [CrossRef]
- Zhang, C.; Guo, Q.; Li, L.; Wang, M.; Wang, T. System Efficiency Improvement for Electric Vehicles Adopting a Permanent Magnet Synchronous Motor Direct Drive System. Energies 2017, 10, 2030. [Google Scholar] [CrossRef]
- Krause, P.; Wasynczuk, O.; Sudhoff, S.; Pekarek, S. Analysis of Electric Machinery and Drive Systems; Wiley-IEEE Press: Hoboken, NJ, USA, 2013. [Google Scholar]
- Vas, P. Electrical Machines and Drives: A Space-Vector Theory Approach; Clarendon Press: Oxford, UK, 1993. [Google Scholar]
- Štumberger, B.; Štumberger, G.; Dolinar, D.; Hamler, A.; Trlep, M. Evaluation of saturation and cross-magnetization effects in interior permanent-magnet synchronous motor. IEEE Trans. Ind. Appl. 2003, 39, 1264–1271. [Google Scholar] [CrossRef]
- Chen, X.; Wang, J.; Sen, B.; Lazari, P.; Sun, T. A High-Fidelity and Computationally Efficient Model for Interior Permanent-Magnet Machines Considering the Magnetic Saturation, Spatial Harmonics, and Iron Loss Effect. IEEE Trans. Ind. Electron. 2015, 62, 4044–4055. [Google Scholar] [CrossRef]
- Boesing, M.; Niessen, M.; Lange, T.; Doncker, R.D. Modeling spatial harmonics and switching frequencies in PM synchronous machines and their electromagnetic forces. In Proceedings of the 2012 XXth International Conference on Electrical Machines, Marseille, France, 2–5 September 2012; pp. 3001–3007. [Google Scholar] [CrossRef]
- Weidenholzer, G.; Silber, S.; Jungmayr, G.; Bramerdorfer, G.; Grabner, H.; Amrhein, W. A flux-based PMSM motor model using RBF interpolation for time-stepping simulations. In Proceedings of the 2013 International Electric Machines Drives Conference, Chicago, IL, USA, 12–15 May 2013; pp. 1418–1423. [Google Scholar] [CrossRef]
- Pinto, D.E.; Pop, A.C.; Kempkes, J.; Gyselinck, J. dq0-modeling of interior permanent-magnet synchronous machines for high-fidelity model order reduction. In Proceedings of the 2017 International Conference on Optimization of Electrical and Electronic Equipment (OPTIM) 2017 Intl Aegean Conference on Electrical Machines and Power Electronics (ACEMP), Fundata, Romania, 25–27 May 2017; pp. 357–363. [Google Scholar] [CrossRef]
- Luo, G.; Zhang, R.; Chen, Z.; Tu, W.; Zhang, S.; Kennel, R. A Novel Nonlinear Modeling Method for Permanent-Magnet Synchronous Motors. IEEE Trans. Ind. Electron. 2016, 63, 6490–6498. [Google Scholar] [CrossRef]
- Fasil, M.; Antaloae, C.; Mijatovic, N.; Jensen, B.B.; Holboll, J. Improved dq-Axes Model of PMSM Considering Airgap Flux Harmonics and Saturation. IEEE Trans. Appl. Supercond. 2016, 26, 1–5. [Google Scholar] [CrossRef]
- Li, S.; Han, D.; Sarlioglu, B. Modeling of Interior Permanent Magnet Machine Considering Saturation, Cross Coupling, Spatial Harmonics, and Temperature Effects. IEEE Trans. Transp. Electrif. 2017, 3, 682–693. [Google Scholar] [CrossRef]
- Stipetić, S.; Goss, J.; Žarko, D.; Popescu, M. Calculation of Efficiency Maps Using a Scalable Saturated Model of Synchronous Permanent Magnet Machines. IEEE Trans. Ind. Appl. 2018, 54, 4257–4267. [Google Scholar] [CrossRef]
- Chu, W.Q.; Zhu, Z.Q. Average Torque Separation in Permanent Magnet Synchronous Machines Using Frozen Permeability. IEEE Trans. Magn. 2013, 49, 1202–1210. [Google Scholar] [CrossRef]
- Dück, P.; Ponick, B. A novel iron-loss-model for permanent magnet synchronous machines in traction applications. In Proceedings of the 2016 International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles International Transportation Electrification Conference (ESARS-ITEC), Toulouse, France, 2–4 November 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Mellor, P.H.; Wrobel, R.; Holliday, D. A computationally efficient iron loss model for brushless AC machines that caters for rated flux and field weakened operation. In Proceedings of the 2009 IEEE International Electric Machines and Drives Conference, Miami, FL, USA, 3–6 May 2009; pp. 490–494. [Google Scholar] [CrossRef]
- Bramerdorfer, G.; Andessner, D. Accurate and Easy-to-Obtain Iron Loss Model for Electric Machine Design. IEEE Trans. Ind. Electron. 2017, 64, 2530–2537. [Google Scholar] [CrossRef]
- Miller, T.J.E.; Popescu, M.; Cossar, C.; McGilp, M. Performance estimation of interior permanent-magnet brushless motors using the voltage-driven flux-MMF diagram. IEEE Trans. Magn. 2006, 42, 1867–1872. [Google Scholar] [CrossRef]
- Bianchi, N.; Alberti, L. MMF Harmonics Effect on the Embedded FE Analytical Computation of PM Motors. IEEE Trans. Ind. Appl. 2010, 46, 812–820. [Google Scholar] [CrossRef]
- Liu, K.; Feng, J.; Guo, S.; Xiao, L.; Zhu, Z.Q. Identification of Flux Linkage Map of Permanent Magnet Synchronous Machines Under Uncertain Circuit Resistance and Inverter Nonlinearity. IEEE Trans. Ind. Inf. 2018, 14, 556–568. [Google Scholar] [CrossRef]
- Armando, E.; Bojoi, R.; Guglielmi, P.; Pellegrino, G.; Pastorelli, M. Experimental methods for synchronous machines evaluation by an accurate magnetic model identification. In Proceedings of the 2011 IEEE Energy Conversion Congress and Exposition, Phoenix, AZ, USA, 17–22 September 2011; pp. 1744–1749. [Google Scholar] [CrossRef]
- Marčič, T.; Štumberger, G.; Štumberger, B. Analyzing the Magnetic Flux Linkage Characteristics of Alternating Current Rotating Machines by Experimental Method. IEEE Trans. Magn. 2011, 47, 2283–2291. [Google Scholar] [CrossRef]
- Hubbard, J.H.; Burke Hubbard, B. Vector Calculus, Linear Algebra, and Differential Forms: A Unified Approach; Prentice Hall: Upper Saddle River, NJ, USA, 1998. [Google Scholar]
- Choi, G.; Jahns, T.M. Investigation of Key Factors Influencing the Response of Permanent Magnet Synchronous Machines to Three-Phase Symmetrical Short-Circuit Faults. IEEE Trans. Energy Convers. 2016, 31, 1488–1497. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Nominal data | |
| Power | 25 kW |
| Dc-link voltage | 48 V |
| Maximal phase current | 778 A |
| Characteristic current | 550 A |
| Number of pole pairs | 4 |
| Moment of inertia | kgm2 |
| Parameters | |
| Stator resistance | |
| d-axis inductance | H |
| q-axis inductance | H |
| Rotor flux-linkage | mWb |
| Model Type | Parameterization Time |
|---|---|
| CM | s |
| FLM via intersections | s |
| FLM via minimization | s |
| Simulation Task | FLM | CM | Improvement |
|---|---|---|---|
| Three-phase short circuit | s | s | 9.4% |
| Control with field weakening | s | s | 18.4% |
| Demagnetization risk assessment | 375 min | 414 min | 9.4% |
| WLTC driving cycle | 104 min | 127 min | 18.1% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Drobnič, K.; Gašparin, L.; Fišer, R. Fast and Accurate Model of Interior Permanent-Magnet Machine for Dynamic Characterization. Energies 2019, 12, 783. https://doi.org/10.3390/en12050783
Drobnič K, Gašparin L, Fišer R. Fast and Accurate Model of Interior Permanent-Magnet Machine for Dynamic Characterization. Energies. 2019; 12(5):783. https://doi.org/10.3390/en12050783
Chicago/Turabian StyleDrobnič, Klemen, Lovrenc Gašparin, and Rastko Fišer. 2019. "Fast and Accurate Model of Interior Permanent-Magnet Machine for Dynamic Characterization" Energies 12, no. 5: 783. https://doi.org/10.3390/en12050783
APA StyleDrobnič, K., Gašparin, L., & Fišer, R. (2019). Fast and Accurate Model of Interior Permanent-Magnet Machine for Dynamic Characterization. Energies, 12(5), 783. https://doi.org/10.3390/en12050783