A Driving Technique for AC-AC Direct Matrix Converters Based on Sigma-Delta Modulation †





Abstract
:1. Introduction
2. Theory and Methods
2.1. Sigma-Delta Modulation
2.1.1. Noise Shaping Filter
2.1.2. Output Voltage Error
2.1.3. Input Reactive Power Error
2.1.4. Multi-Objective Optimization
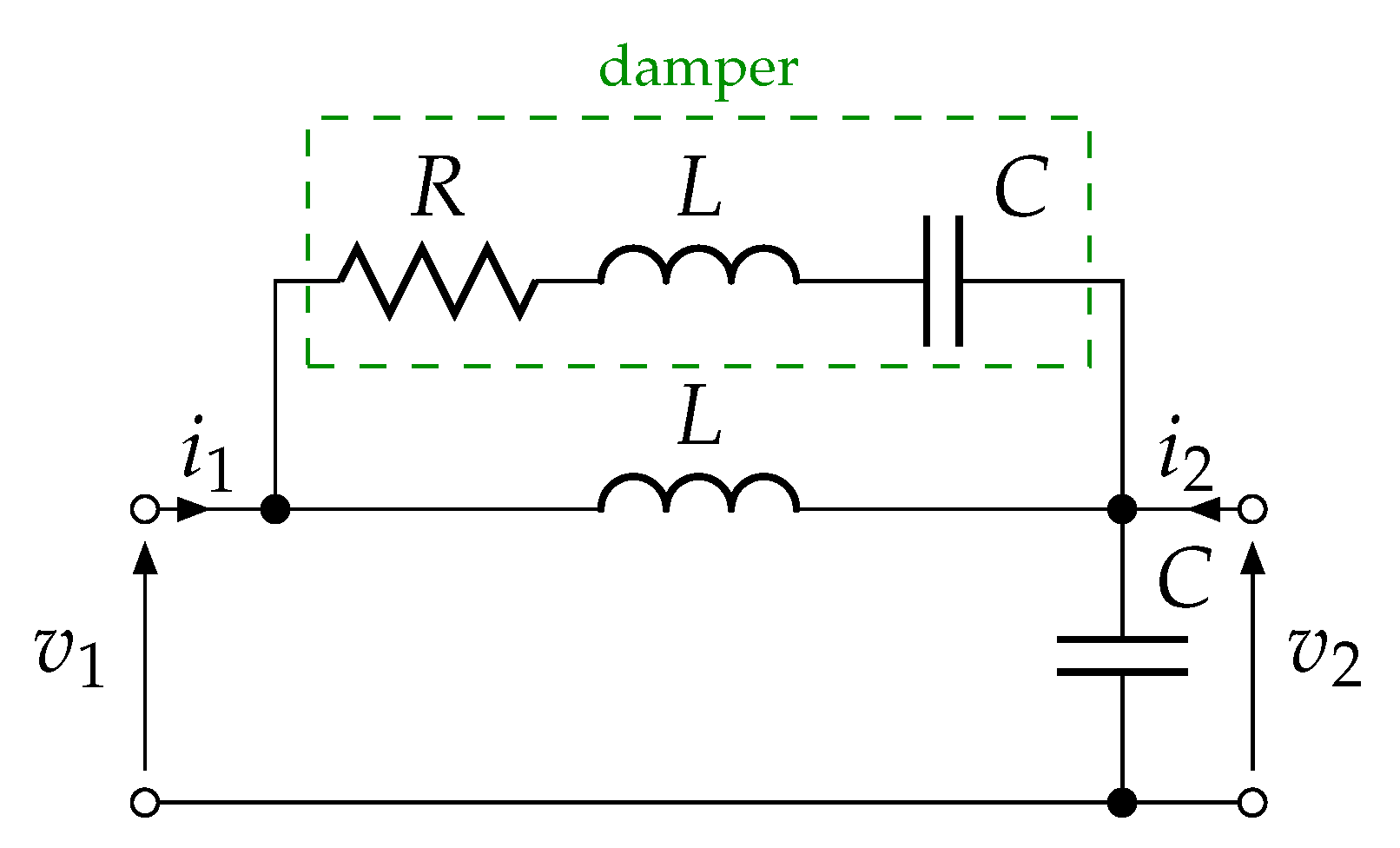
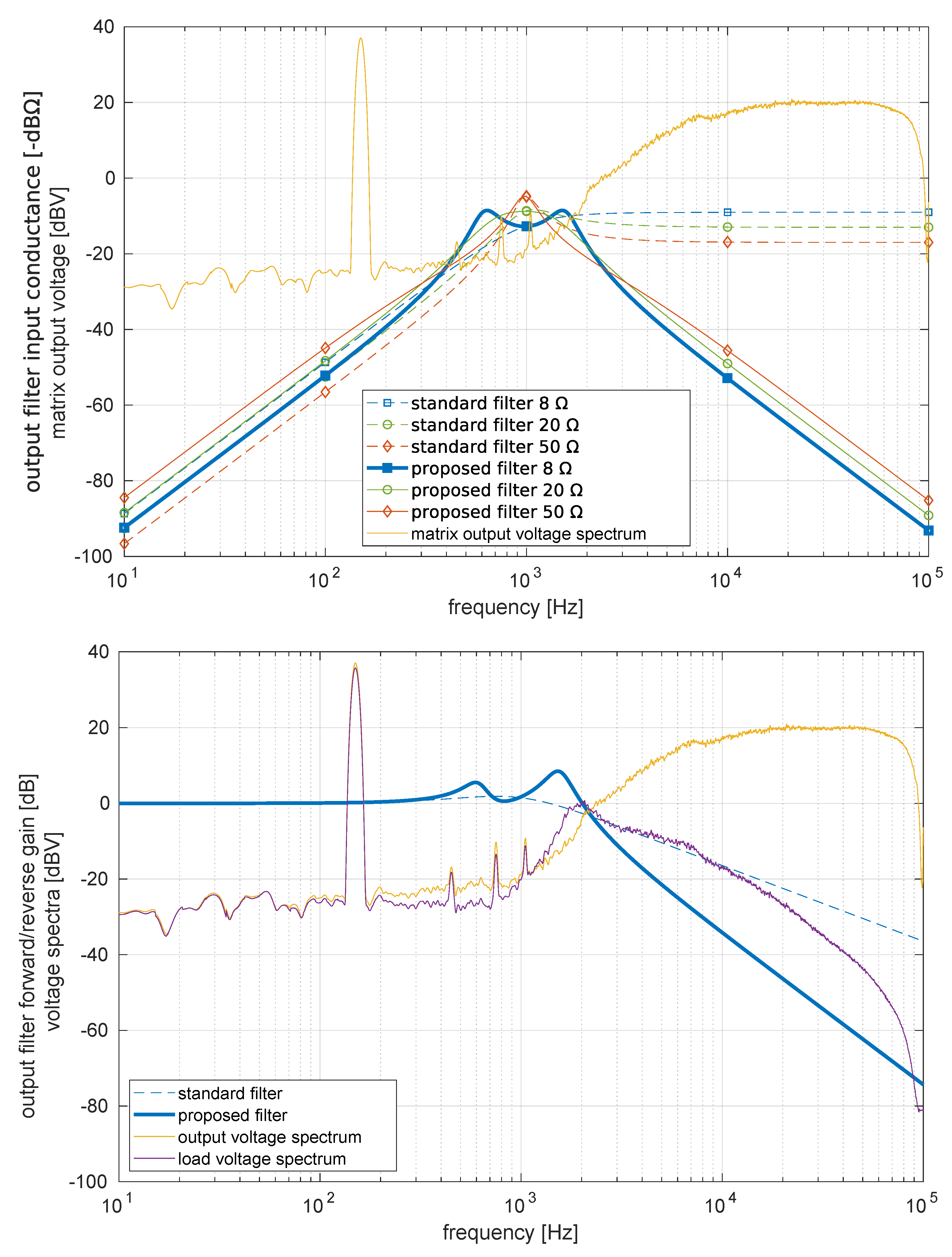
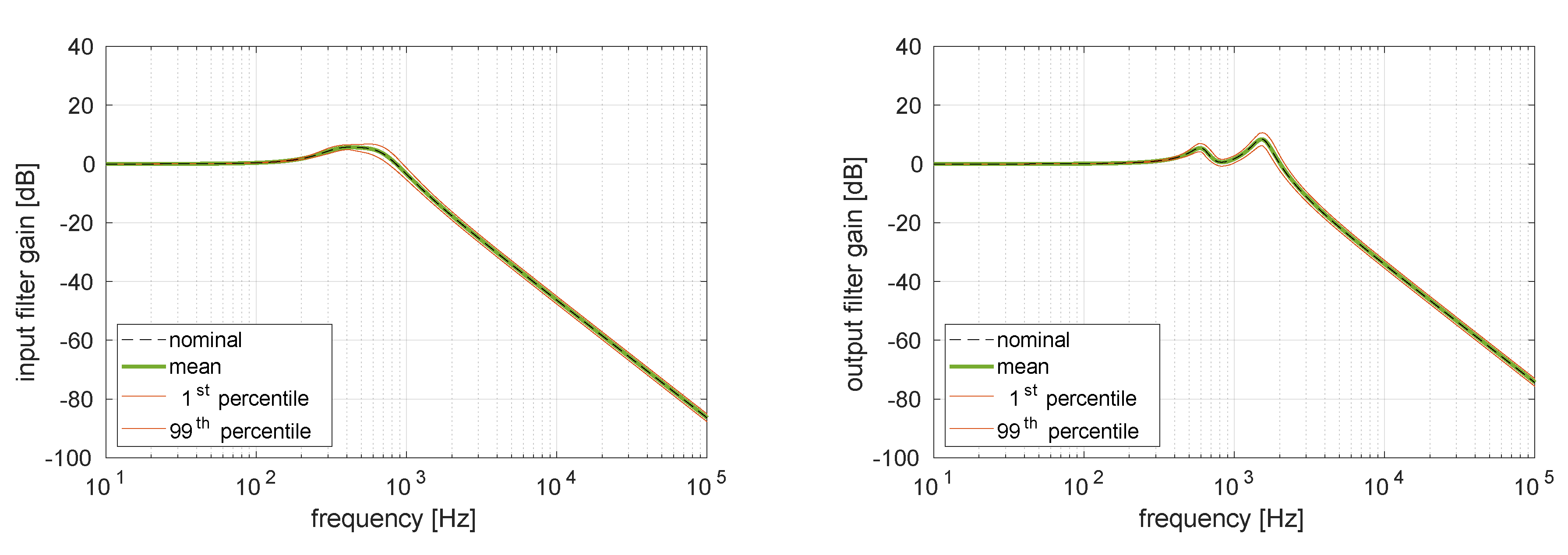
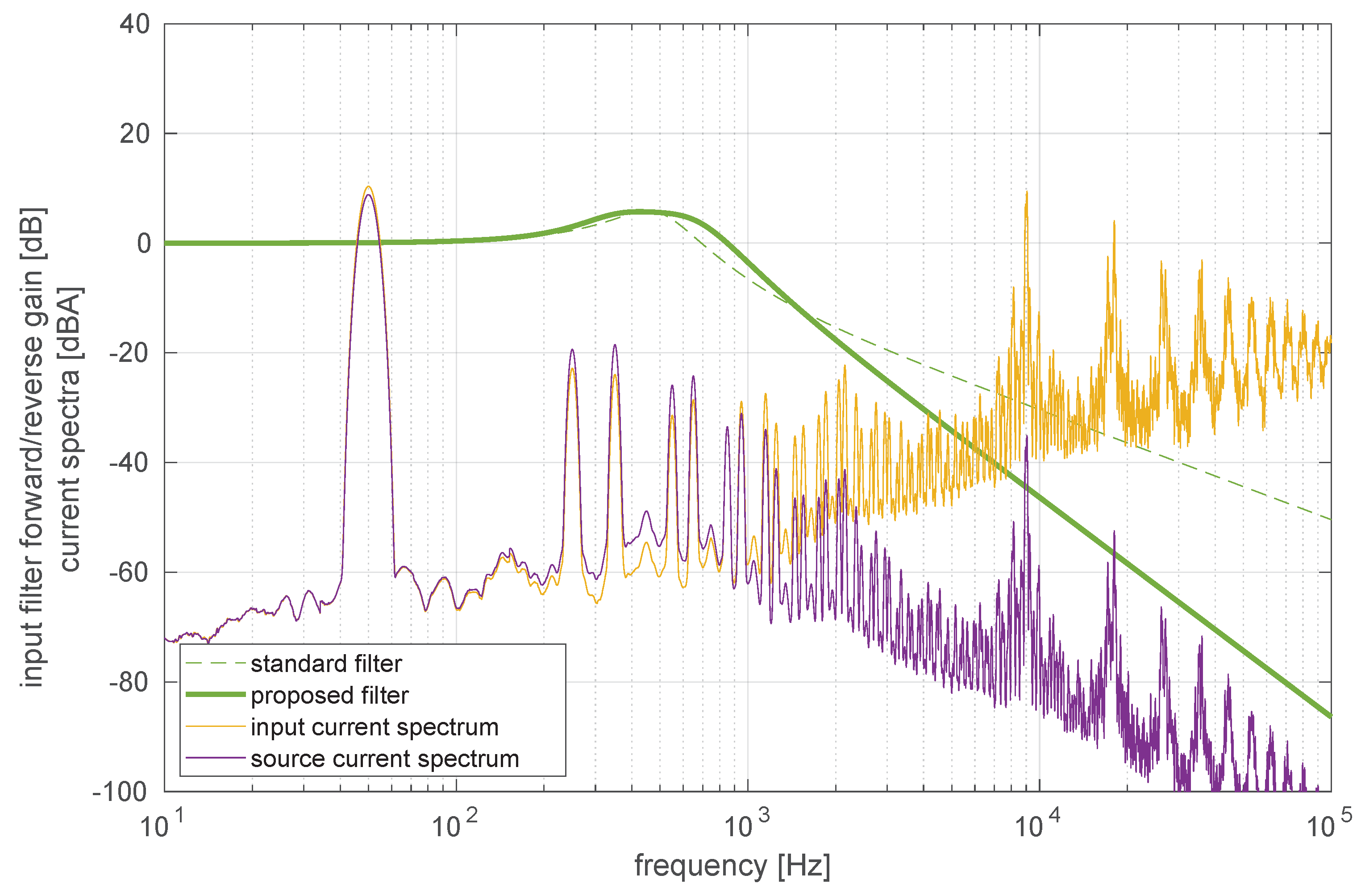
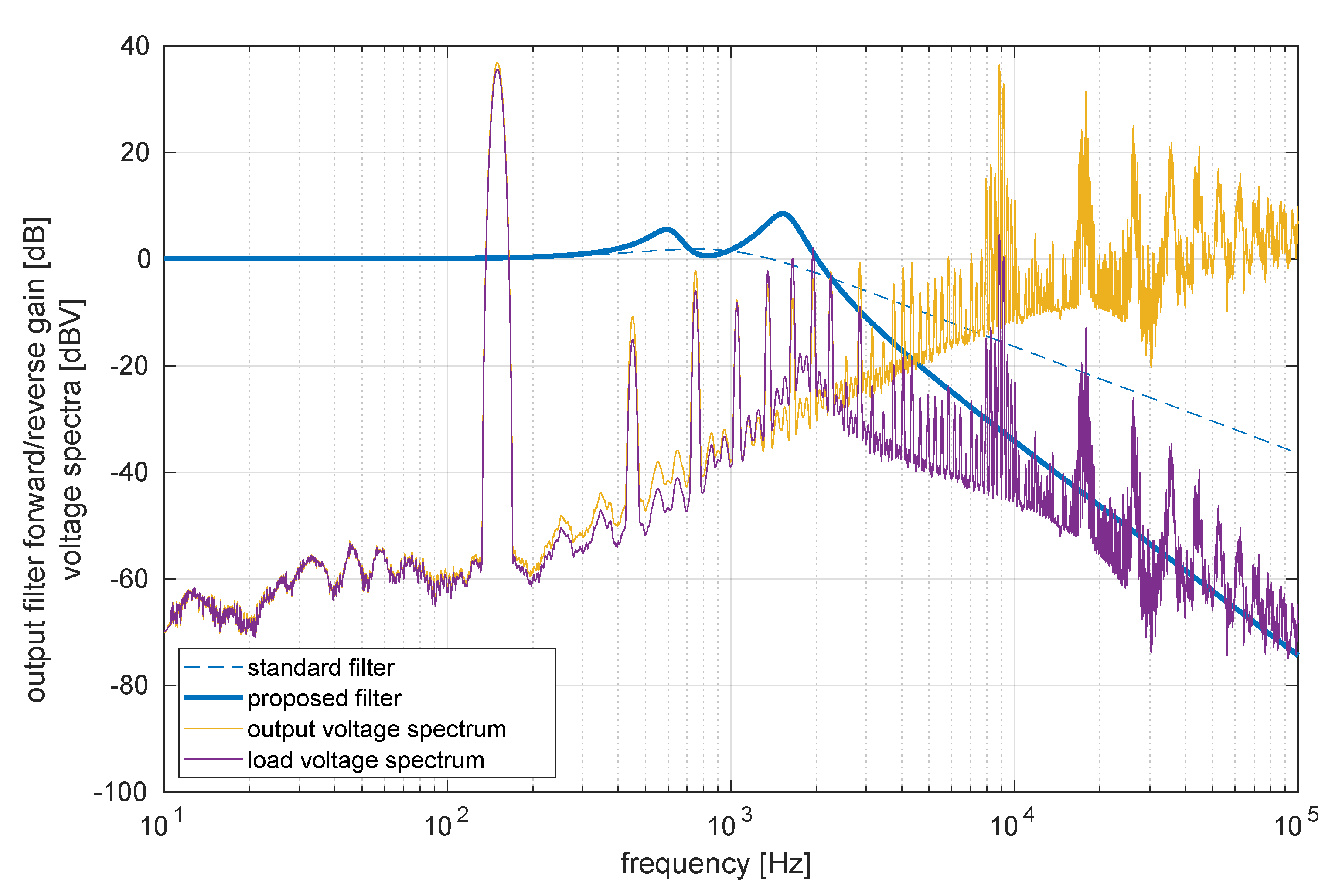
2.2. Input and Output Filters
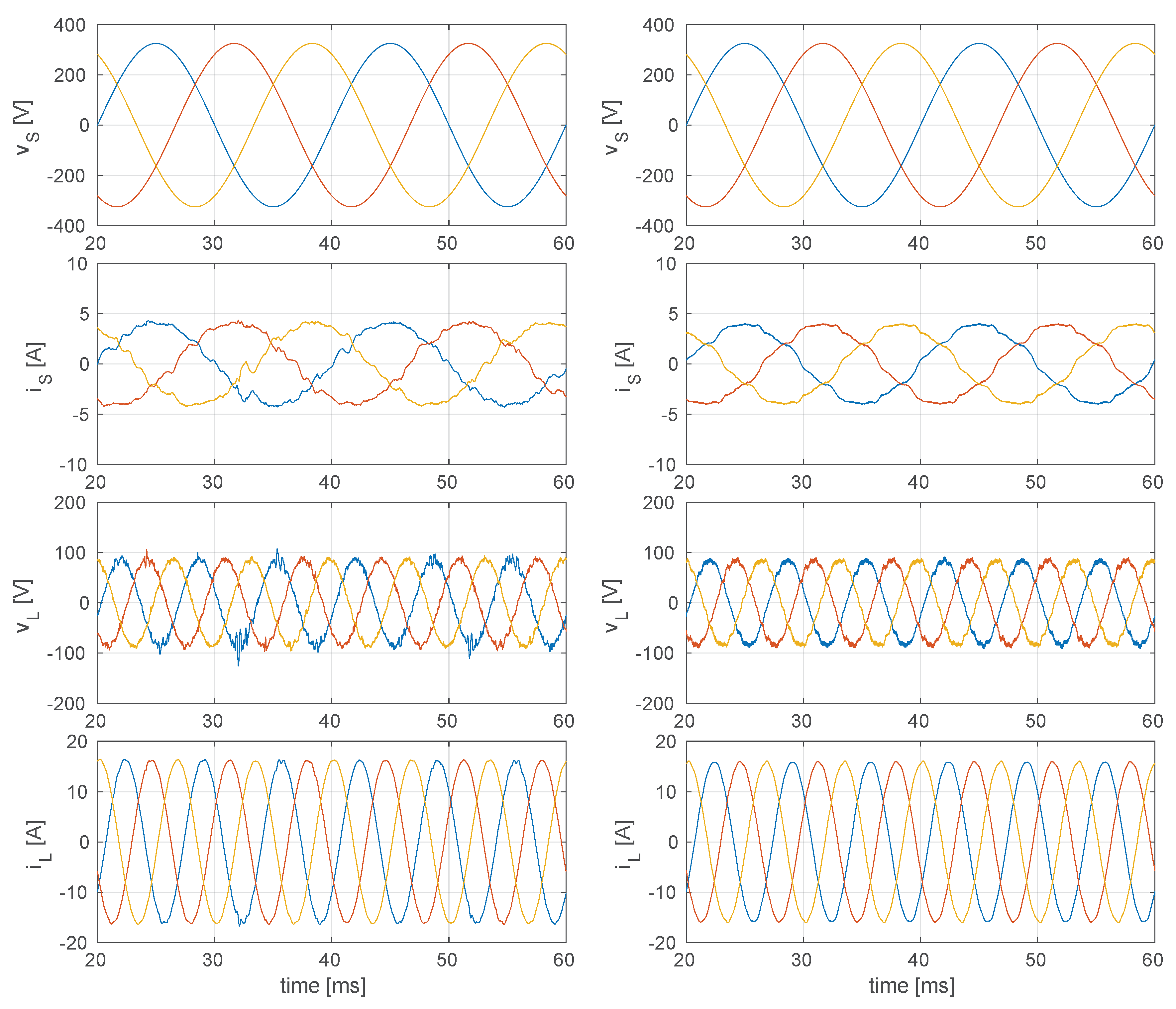
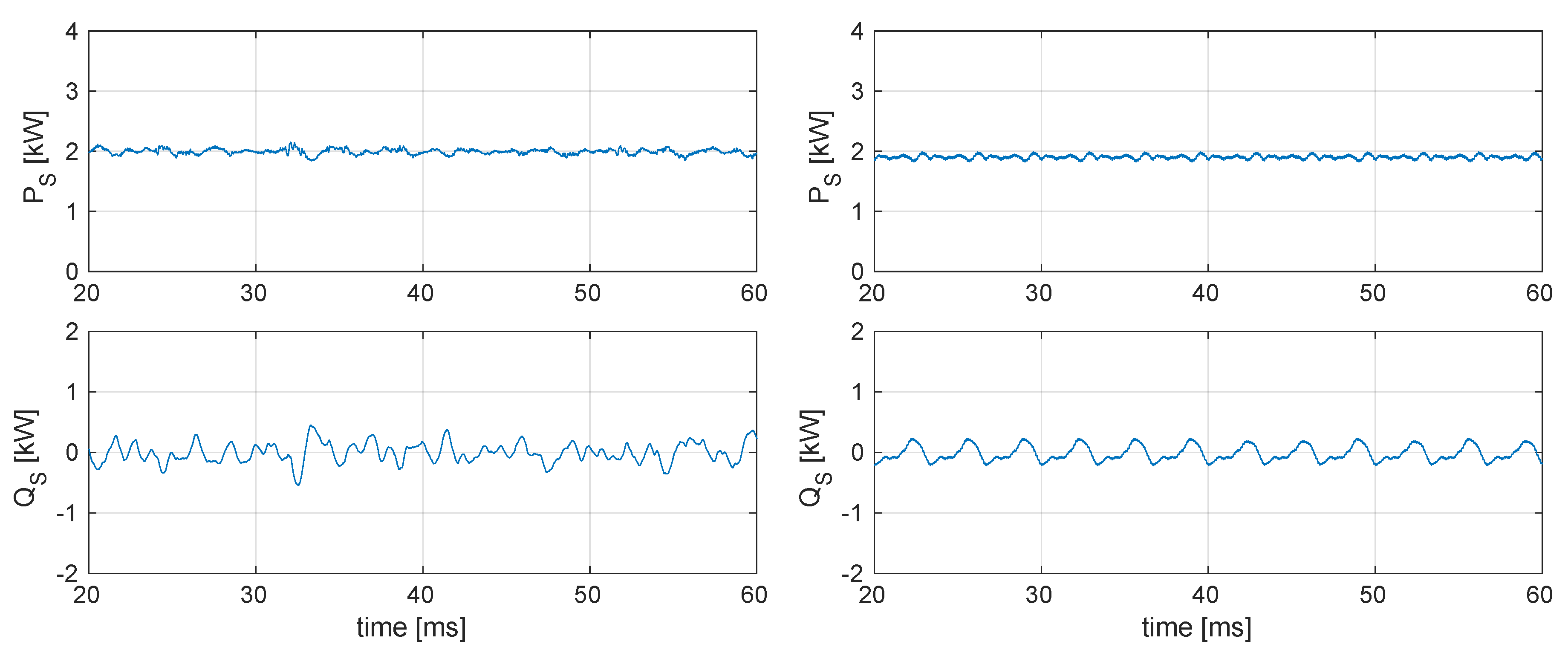
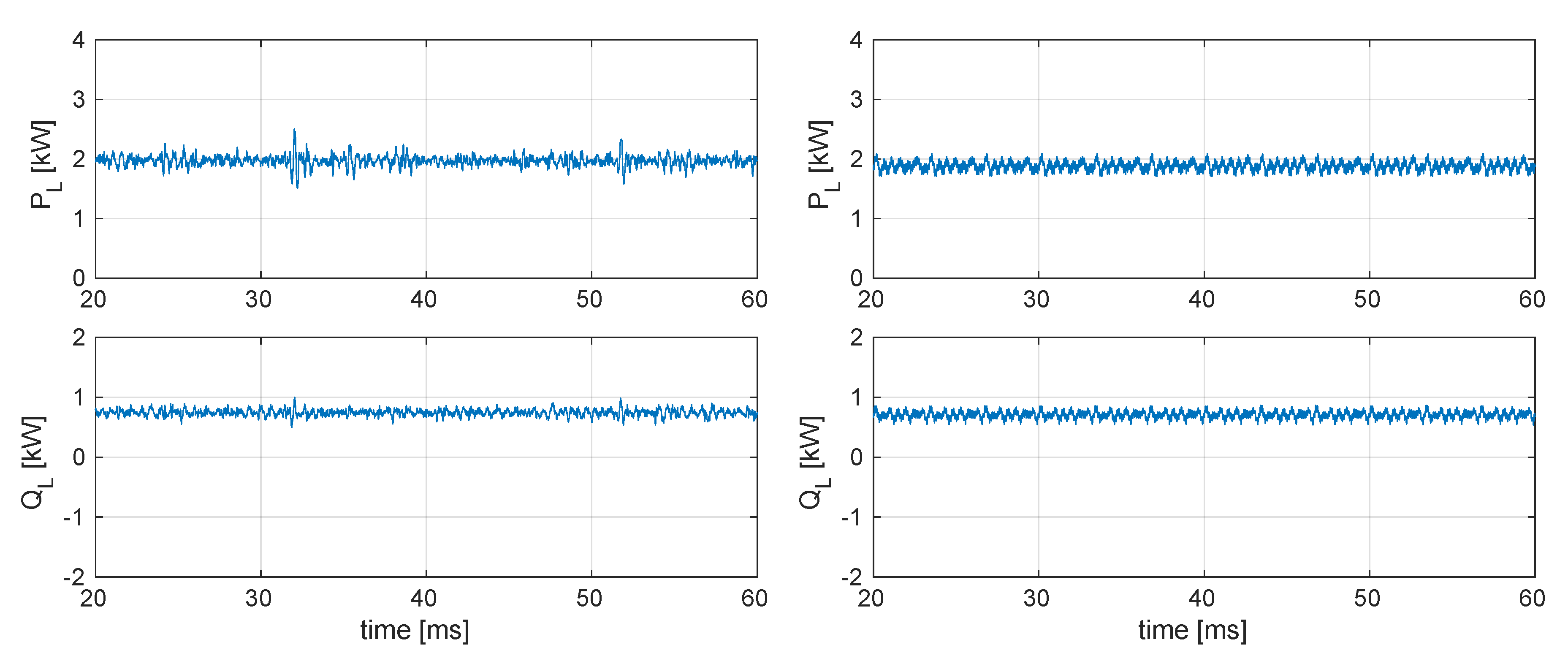
3. Simulation Results
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Rodriguez, J.; Rivera, M.; Kolar, J.W.; Wheeler, P.W. A Review of Control and Modulation Methods for Matrix Converters. IEEE Trans. Ind. Electron. 2012, 59, 58–70. [Google Scholar] [CrossRef]
- Mohamad, A.S. Modeling of a steady-state VSCF aircraft electrical generator based on a matrix converter with high number of input phases. In Proceedings of the 2015 IEEE Student Conference on Research and Development (SCOReD), Kuala Lumpur, Malaysia, 13–14 December 2015; pp. 500–505. [Google Scholar]
- Aten, M.; Towers, G.; Whitley, C.; Wheeler, P.; Clare, J.; Bradley, K. Reliability comparison of matrix and other converter topologies. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 867–875. [Google Scholar] [CrossRef]
- Ali, S.; Wolfs, P. A matrix converter based voltage regulator for MV rural feeders. In Proceedings of the 2014 IEEE PES General Meeting Conference & Exposition, National Harbor, MD, USA, 27–31 July 2014; pp. 1–5. [Google Scholar]
- Abdel-Rahim, O.; Funato, H.; Abu-Rub, H.; Ellabban, O. Multiphase wind energy generation with direct matrix converter. In Proceedings of the 2014 IEEE International Conference on Industrial Technology (ICIT), Busan, Korea, 26 February–1 March 2014; pp. 519–523. [Google Scholar]
- Raja, K.M.; Vijayakumar, K.; Kannan, S. Matrix converter based solar photo voltaic system for reactive power compensation using sinusoidal pulse width modulation. In Proceedings of the 2014 IEEE International Conference on Computational Intelligence and Computing Research (ICCIC), Coimbatore, India, 18–20 December 2014; pp. 1–5. [Google Scholar]
- Bucknall, R.W.G.; Ciaramella, K.M. On the conceptual design and performance of a matrix converter for marine electric propulsion. IEEE Trans. Power Electron. 2010, 25, 1497–1508. [Google Scholar] [CrossRef]
- Li, G.; Yu, S.; Jia, S.; Wang, Q. Control of three phases—Single phase matrix converter for transient electromagnetic sounding. In Proceedings of the 17th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22–25 October 2014; pp. 3074–3077. [Google Scholar]
- Sandoval, J.J.; Essakiappan, S.; Enjeti, P. A bidirectional series resonant matrix converter topology for electric vehicle dc fast charging. In Proceedings of the 2015 IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015; pp. 3109–3116. [Google Scholar]
- Venugopal, L.V.; Jayapal, R. Matrix converter based energy saving for street lights. In Proceedings of the 2015 International Conference on Circuit, Power and Computing Technologies (ICCPCT), Nagercoil, India, 19–20 March 2015; pp. 1–6. [Google Scholar]
- Venturini, M.; Alesina, A. The generalised transformer: A new bidirectional, sinusoidal waveform frequency converter with continuously adjustable input power factor. In Proceedings of the 1980 IEEE Power Electronics Specialists Conference, Atlanta, GA, USA, 16–20 June 1980; pp. 242–252. [Google Scholar] [CrossRef]
- Alesina, A.; Venturini, M. Analysis and design of optimum-amplitude nine-switch direct AC-AC converters. IEEE Trans. Power Electron. 1989, 4, 101–112. [Google Scholar] [CrossRef]
- Ziogas, P.D.; Kang, Y.G.; Stefanovic, V.R. Rectifier-Inverter Frequency Changers with Suppressed DC Link Components. IEEE Trans. Ind. Appl. 1986, 22, 1027–1036. [Google Scholar] [CrossRef]
- Casadei, D.; Serra, G.; Tani, A.; Zarri, L. Optimal Use of Zero Vectors for Minimizing the Output Current Distortion in Matrix Converters. IEEE Trans. Ind. Electron. 2009, 56, 326–336. [Google Scholar] [CrossRef]
- Huber, L.; Borojevic, D. Space vector modulator for forced commutated cycloconverters. In Proceedings of the Conference Record of the IEEE Industry Applications Society Annual Meeting, San Diego, CA, USA, 1–5 October 1989; Volume 1, pp. 871–876. [Google Scholar] [CrossRef]
- Huber, L.; Borojevic, D. Space vector modulated three-phase to three-phase matrix converter with input power factor correction. IEEE Trans. Ind. Appl. 1995, 31, 1234–1246. [Google Scholar] [CrossRef]
- Aziz, P.M.; Sorensen, H.V.; Van der Spiegel, J. An Overview of Sigma-Delta Converters. IEEE Signal Process. Mag. 1996, 13, 61–84. [Google Scholar] [CrossRef]
- Orcioni, S.; d’Aparo, R.D.; Conti, M. A Switching Mode Power Supply with Digital Pulse Density Modulation Control. In Proceedings of the 18th European Conference on IEEE European Conference on Circuit Theory and Design (ECCTD-2007), Seville, Spain, 27–30 August 2007; pp. 603–606. [Google Scholar] [CrossRef]
- Orcioni, S.; d’Aparo, R.; Lobascio, A.; Conti, M. Dynamic OSR dithered sigma–delta modulation in solid state light dimming. Int. J. Circuit Theory Appl. 2013, 41, 387–395. [Google Scholar] [CrossRef]
- Orcioni, S.; Biagetti, G.; Crippa, P.; Falaschetti, L.; Turchetti, C. Sigma-Delta Based Modulation Method for Matrix Converters. In Proceedings of the 2018 IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Palermo, Italy, 12–15 June 2018; pp. 1–5. [Google Scholar]
- Akagi, H.; Kanazawa, Y.; Nabae, A. Instantaneous reactive power compensators comprising switching devices without energy storage components. IEEE Trans. Ind. Appl. 1984, 20, 625–630. [Google Scholar] [CrossRef]
- Nguyen, H.M.; Lee, H.; Chun, T. Input Power Factor Compensation Algorithms Using a New Direct-SVM Method for Matrix Converter. IEEE Trans. Ind. Electron. 2011, 58, 232–243. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Value | Rating [RMS] | Rating [max] |
|---|---|---|---|
| Main inductor | |||
| Main capacitor | |||
| Damper inductor | |||
| Damper capacitor | |||
| Damper resistor |
| Component | Value | Rating [RMS] | Rating [max] |
|---|---|---|---|
| Main inductor | |||
| Main capacitor | |||
| Damper inductor | |||
| Damper capacitor | |||
| Damper resistor |
| THD | THD + N | |||||
|---|---|---|---|---|---|---|
| Quantity | SVM | SVM | ||||
| 0.78% | 5.11% | 6.71% | 5.13% | |||
| 0.27% | 0.98% | 1.27% | 0.99% | |||
| 3.98% | 6.72% | 8.82% | 6.74% | |||
| Entity | Active Power [kW] | Reactive Power [kW] | Power Factor |
|---|---|---|---|
| Source | 0.997 | ||
| Load | — | ||
| Input filter | — | ||
| Output filter | — |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Orcioni, S.; Biagetti, G.; Crippa, P.; Falaschetti, L. A Driving Technique for AC-AC Direct Matrix Converters Based on Sigma-Delta Modulation. Energies 2019, 12, 1103. https://doi.org/10.3390/en12061103
Orcioni S, Biagetti G, Crippa P, Falaschetti L. A Driving Technique for AC-AC Direct Matrix Converters Based on Sigma-Delta Modulation. Energies. 2019; 12(6):1103. https://doi.org/10.3390/en12061103
Chicago/Turabian StyleOrcioni, Simone, Giorgio Biagetti, Paolo Crippa, and Laura Falaschetti. 2019. "A Driving Technique for AC-AC Direct Matrix Converters Based on Sigma-Delta Modulation" Energies 12, no. 6: 1103. https://doi.org/10.3390/en12061103
APA StyleOrcioni, S., Biagetti, G., Crippa, P., & Falaschetti, L. (2019). A Driving Technique for AC-AC Direct Matrix Converters Based on Sigma-Delta Modulation. Energies, 12(6), 1103. https://doi.org/10.3390/en12061103