State of Charge Estimation of Lithium Battery Based on Improved Correntropy Extended Kalman Filter


Abstract
:1. Introduction
- (1)
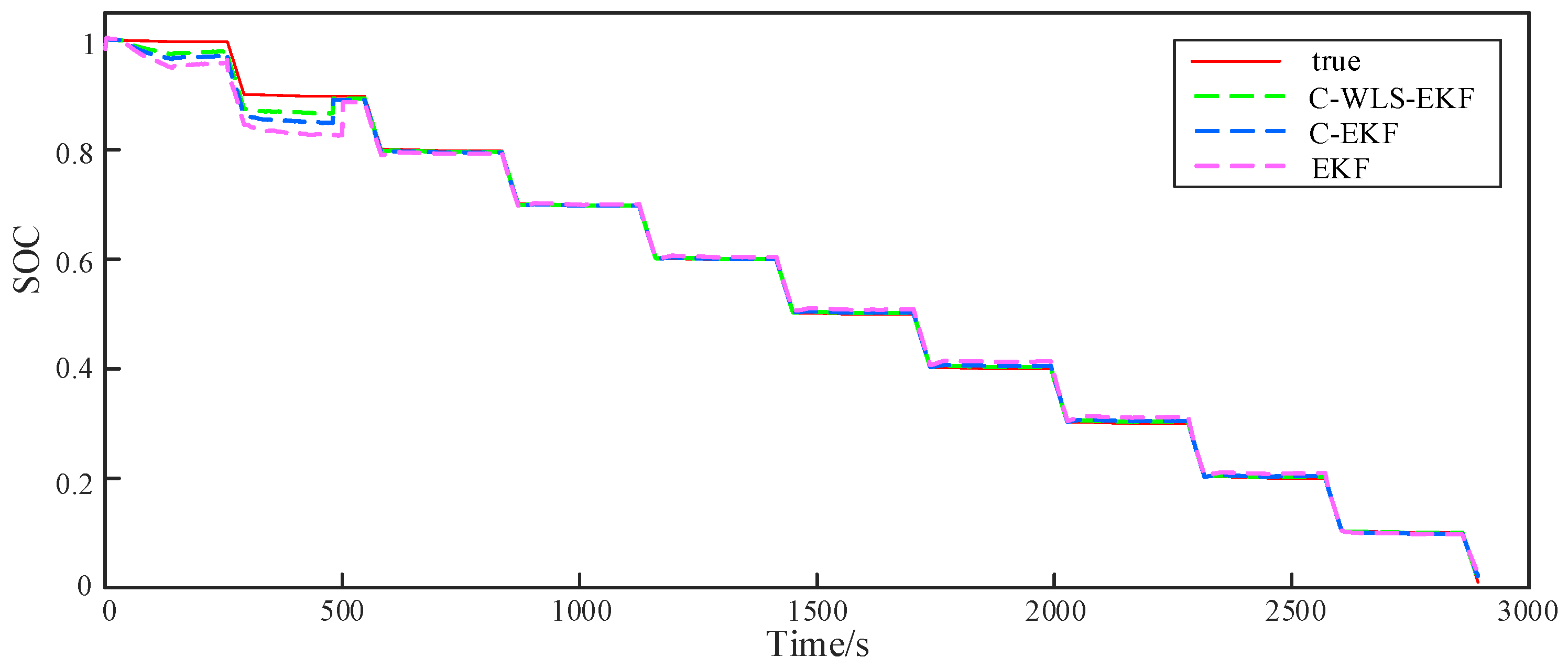
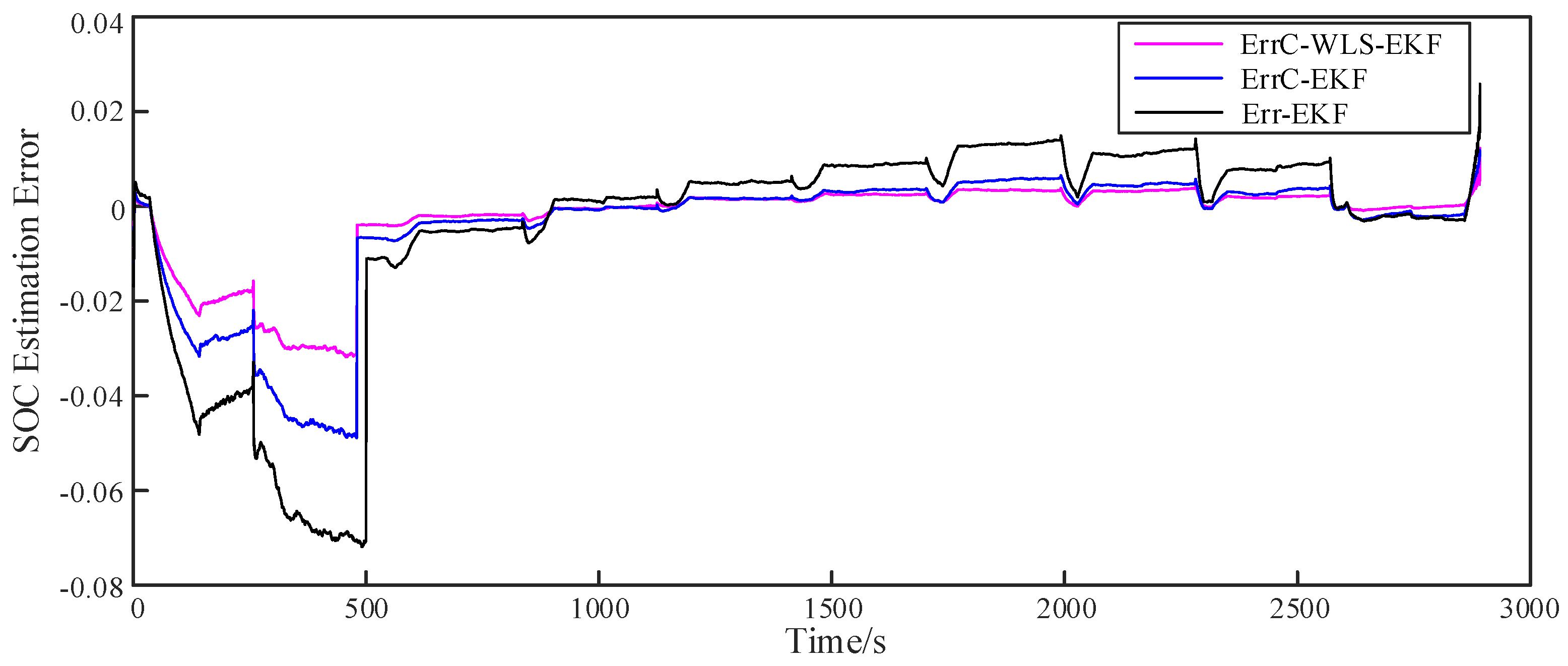
- Taking into account the interference of non-Gaussian noise, a correntropy EKF is utilized to estimate the SOC to improve the estimation accuracy;
- (2)
- Considering the influence of noise covariance on the performance of the EKF algorithm, this paper developed a novel robust extended Kalman filter (C-WLS-EKF) by combining the weighted least squares and correntropy to enhance the digital stability of the C-EKF;
- (3)
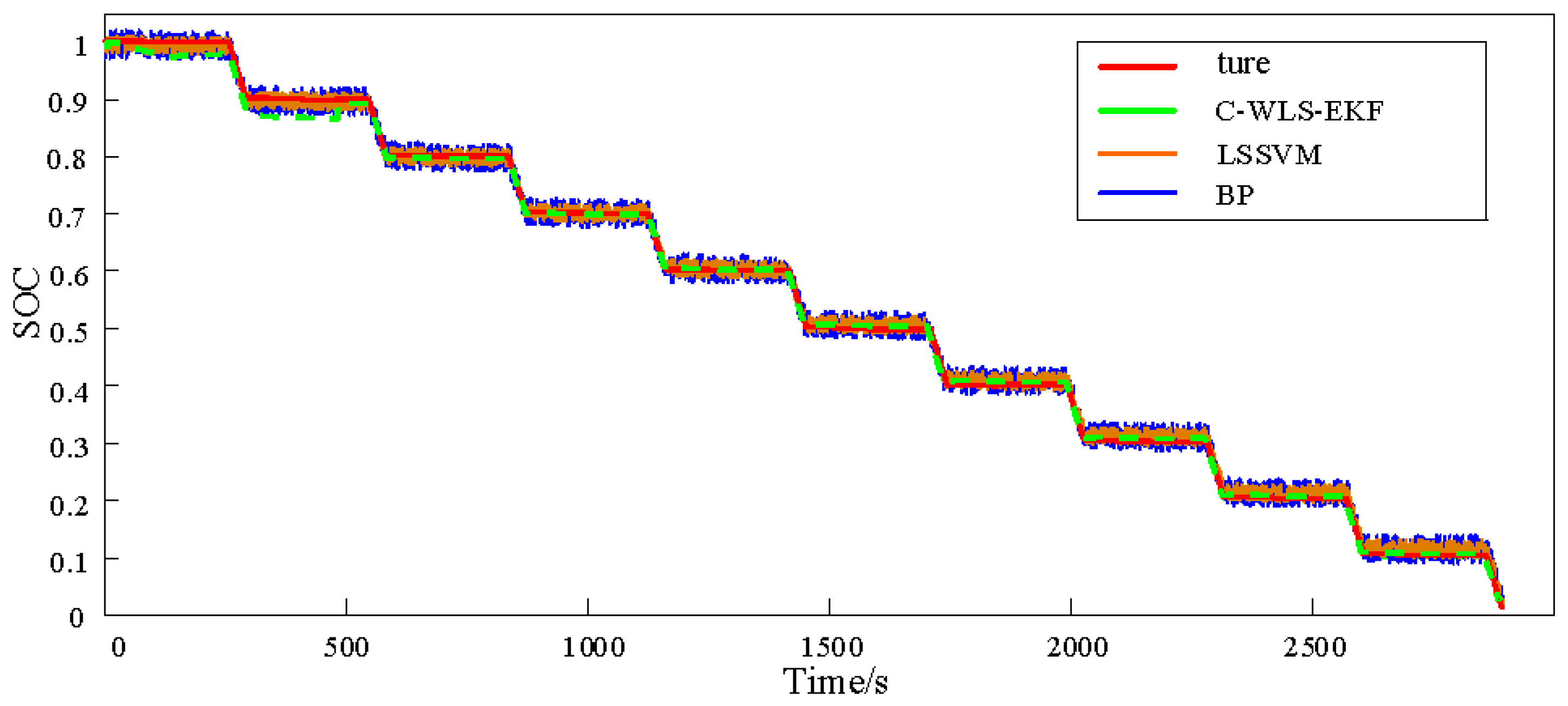
- The proposed C-WLS-EKF is employed for SOC estimation of lithium batteries under non-Gaussian noise cases. Experiments and comparison analysis under different conditions are performed to evaluate the efficacy of the proposed method.
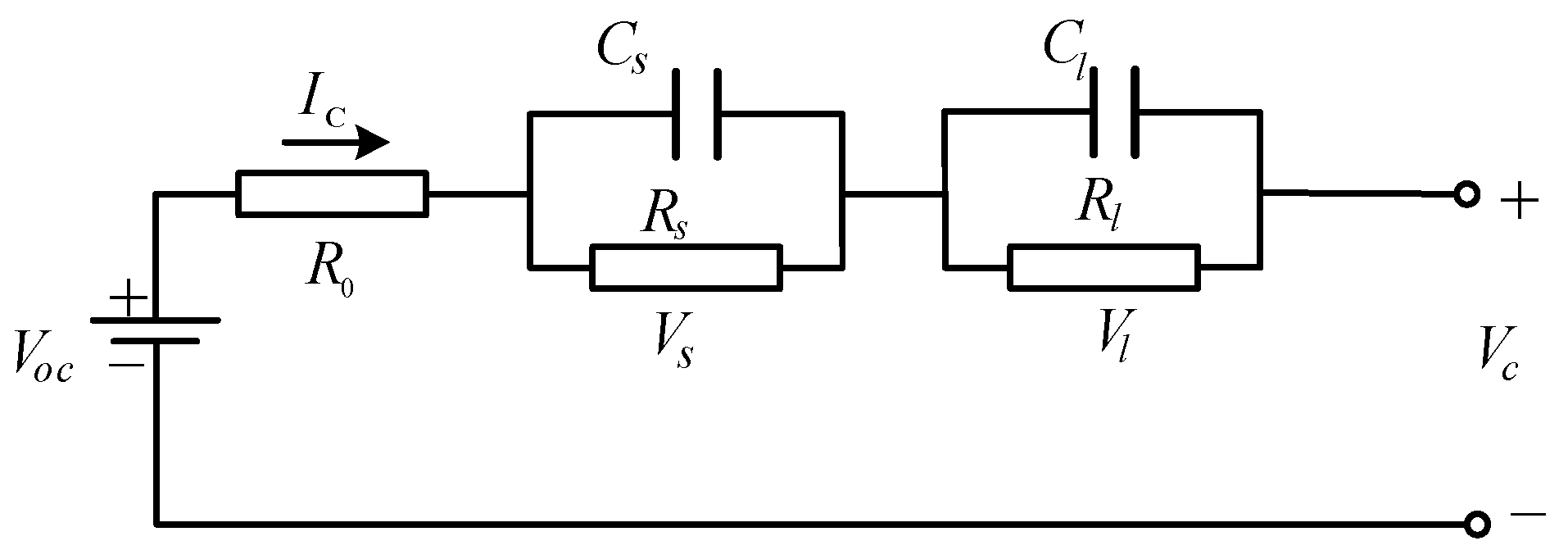
2. Equivalent Circuit Model and Parameter Identification
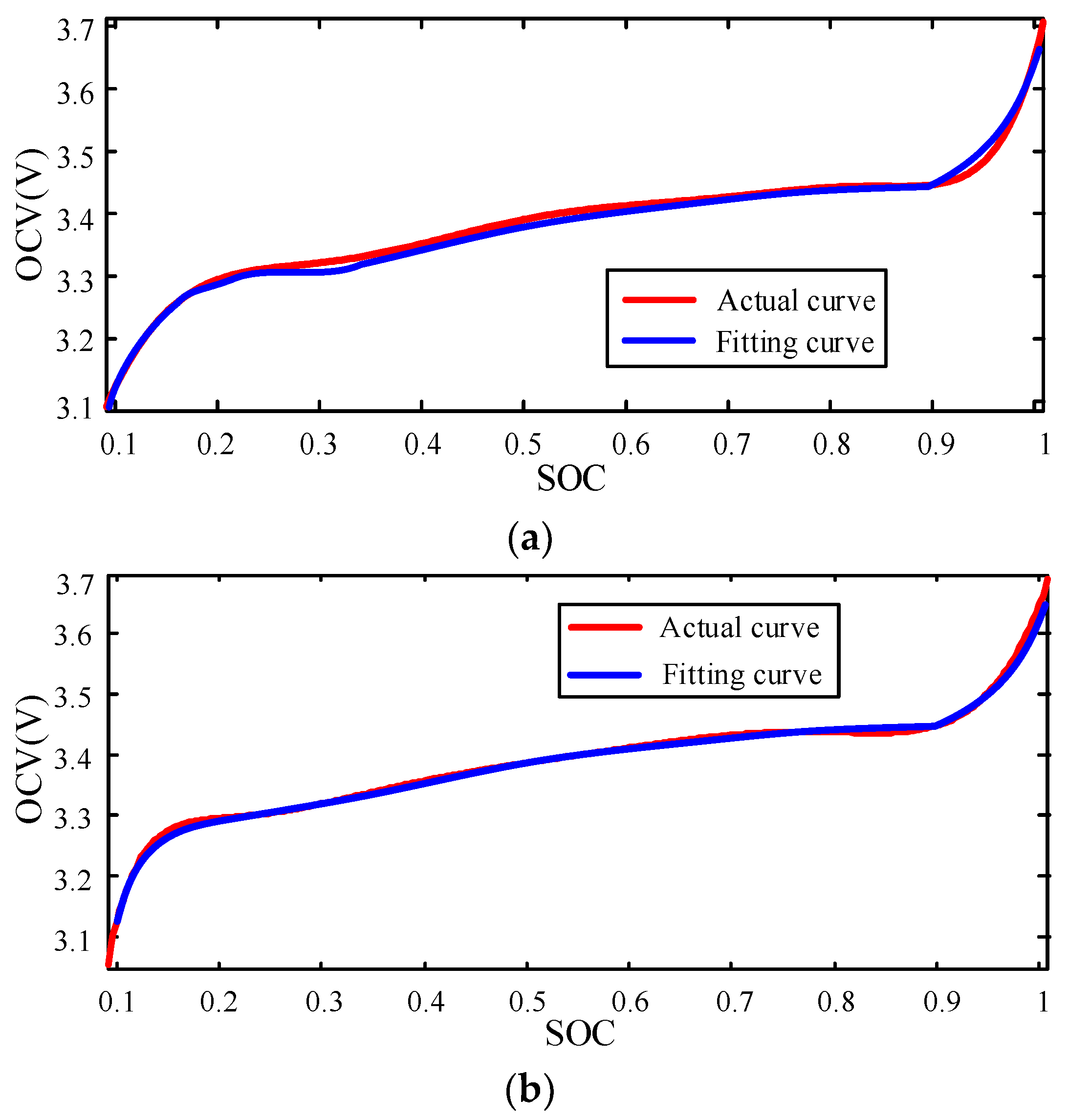
2.1. Relationship between SOC and OCV
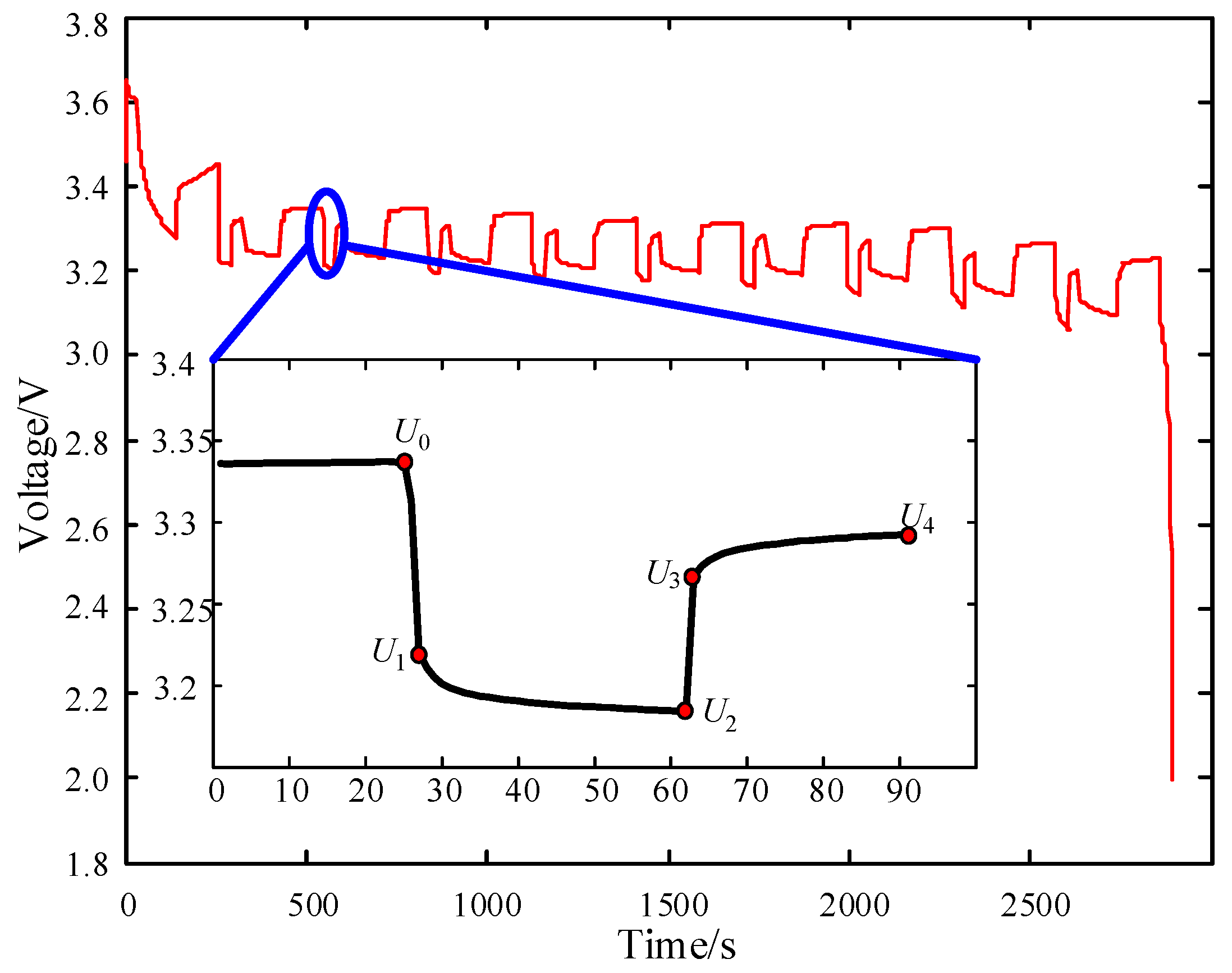
2.2. Model Parameter Identification
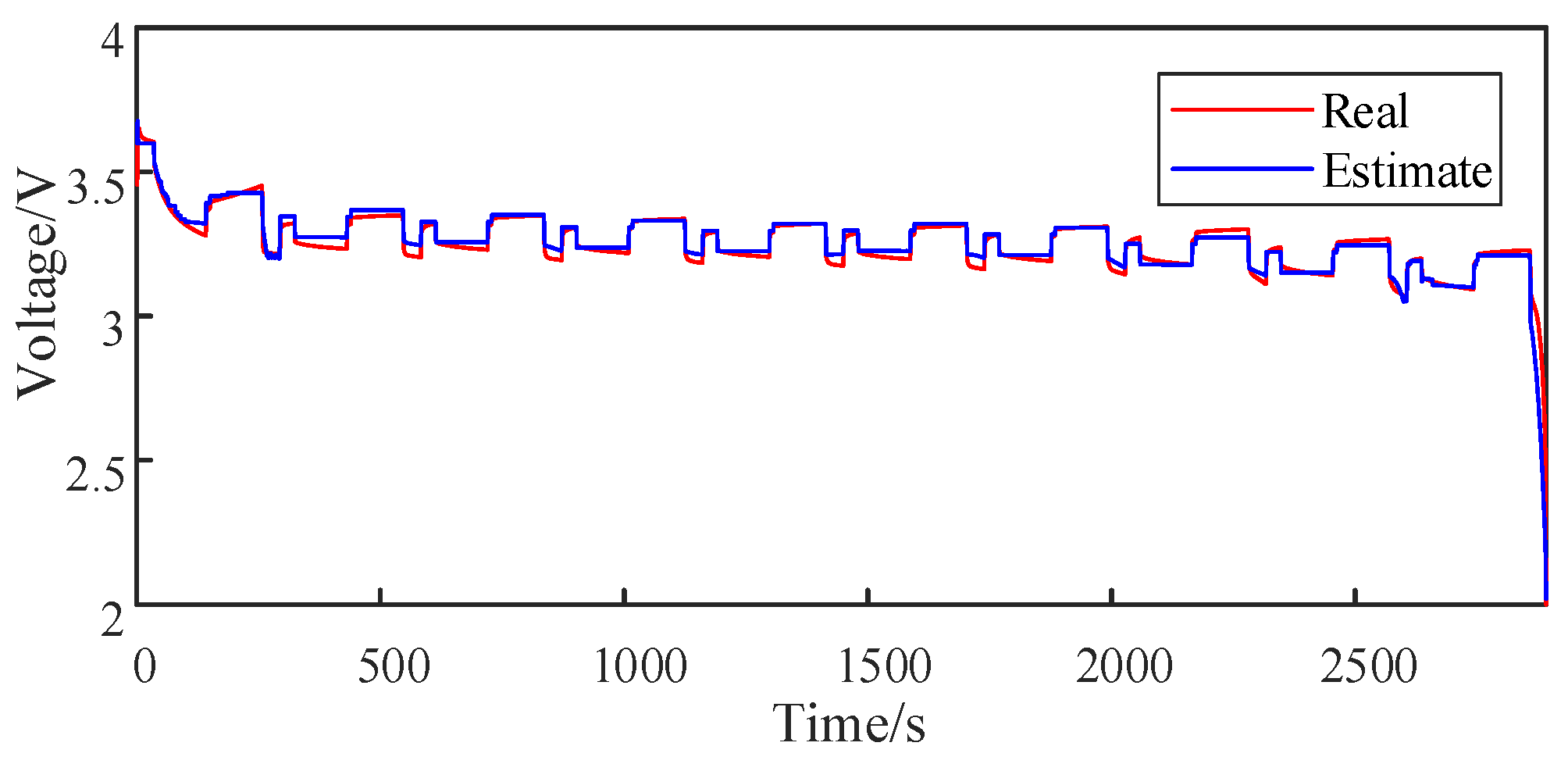
2.3. Parameter Identification Result Verification
3. SOC Estimation Based on EKF with Correntropy
3.1. Correntropy
3.2. EKF with Correntropy
3.3. C-EKF with WLS
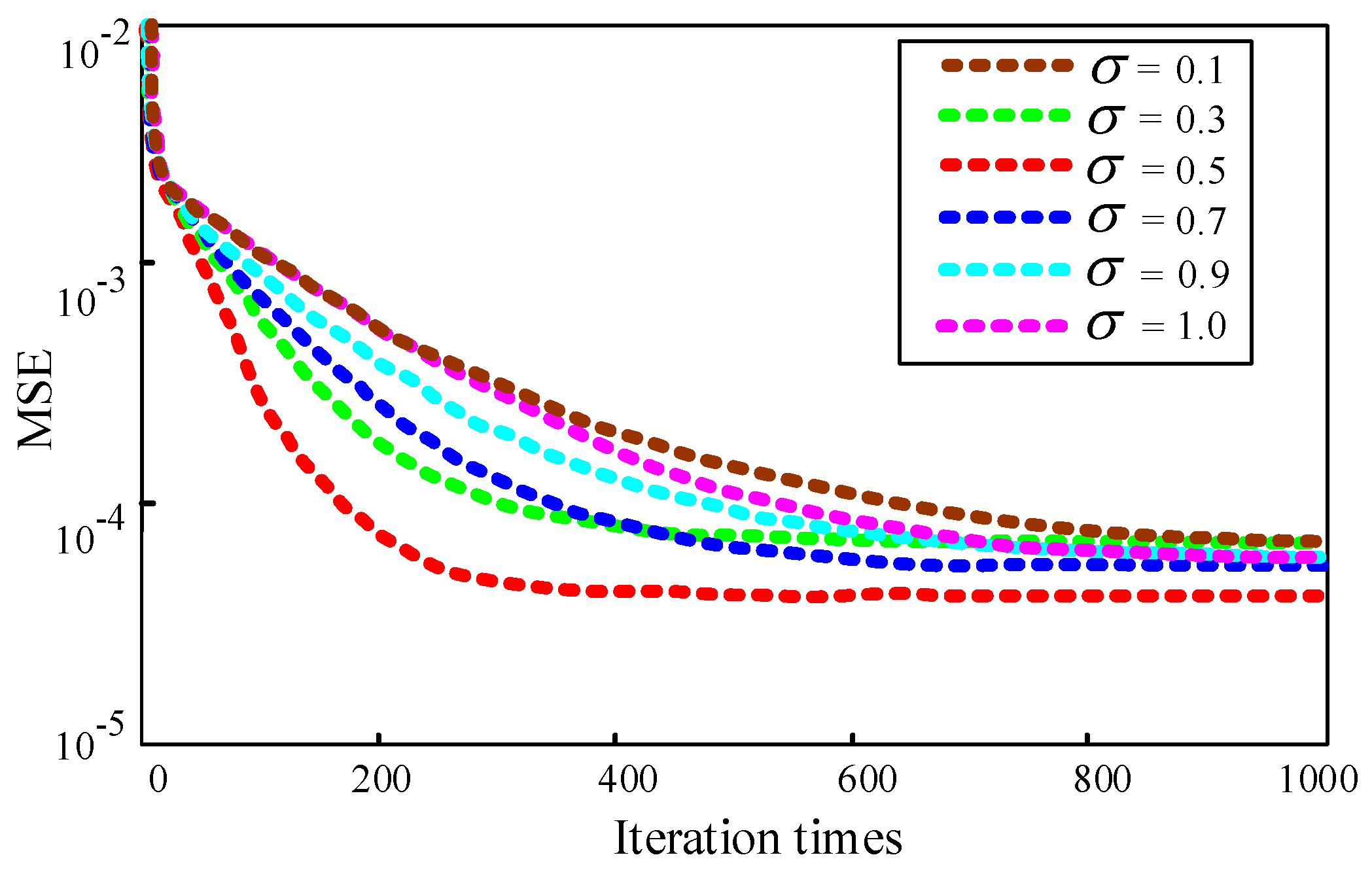
3.4. Convergence Analysis of the C-WLS-EKF Algorithm
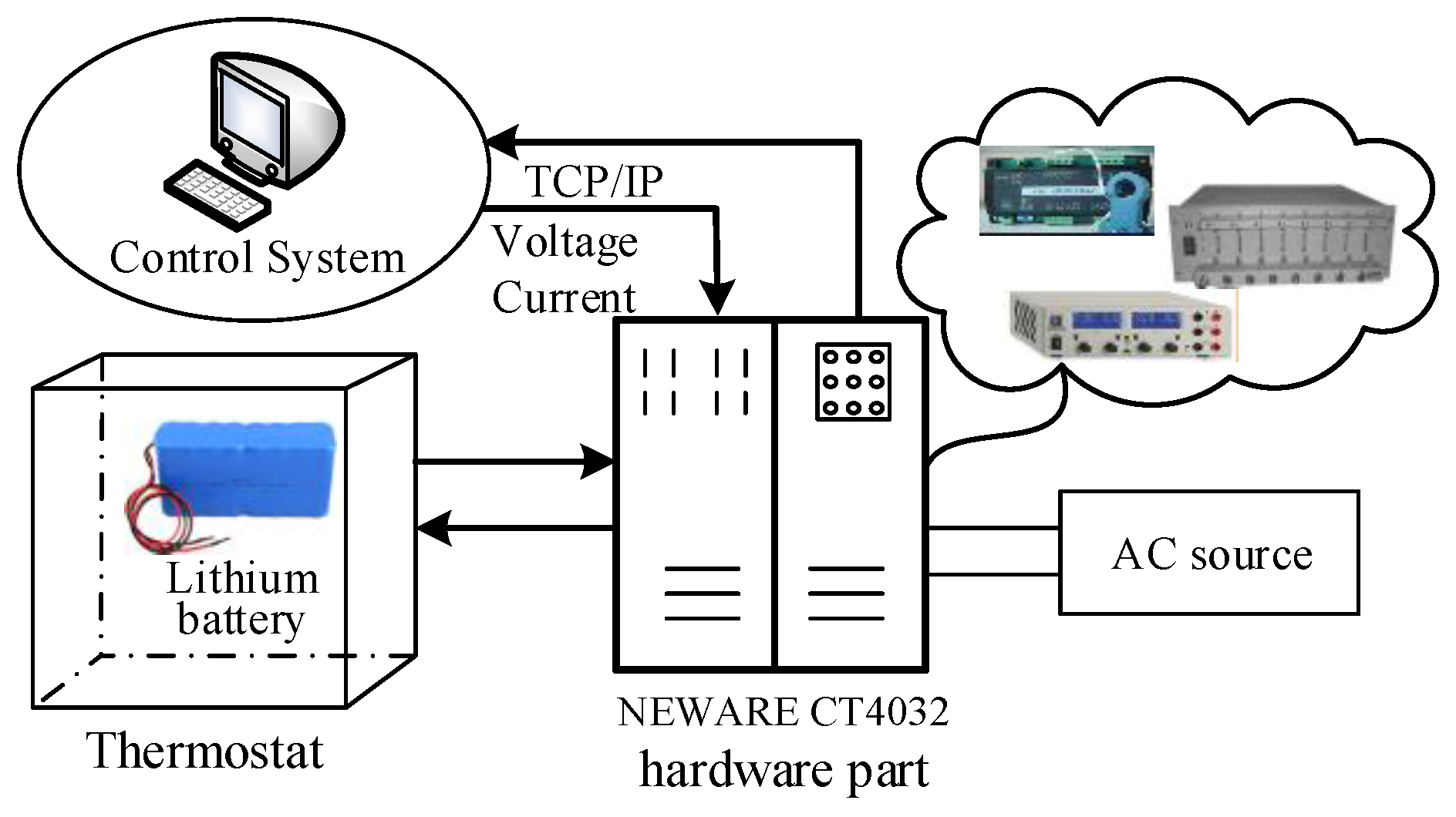
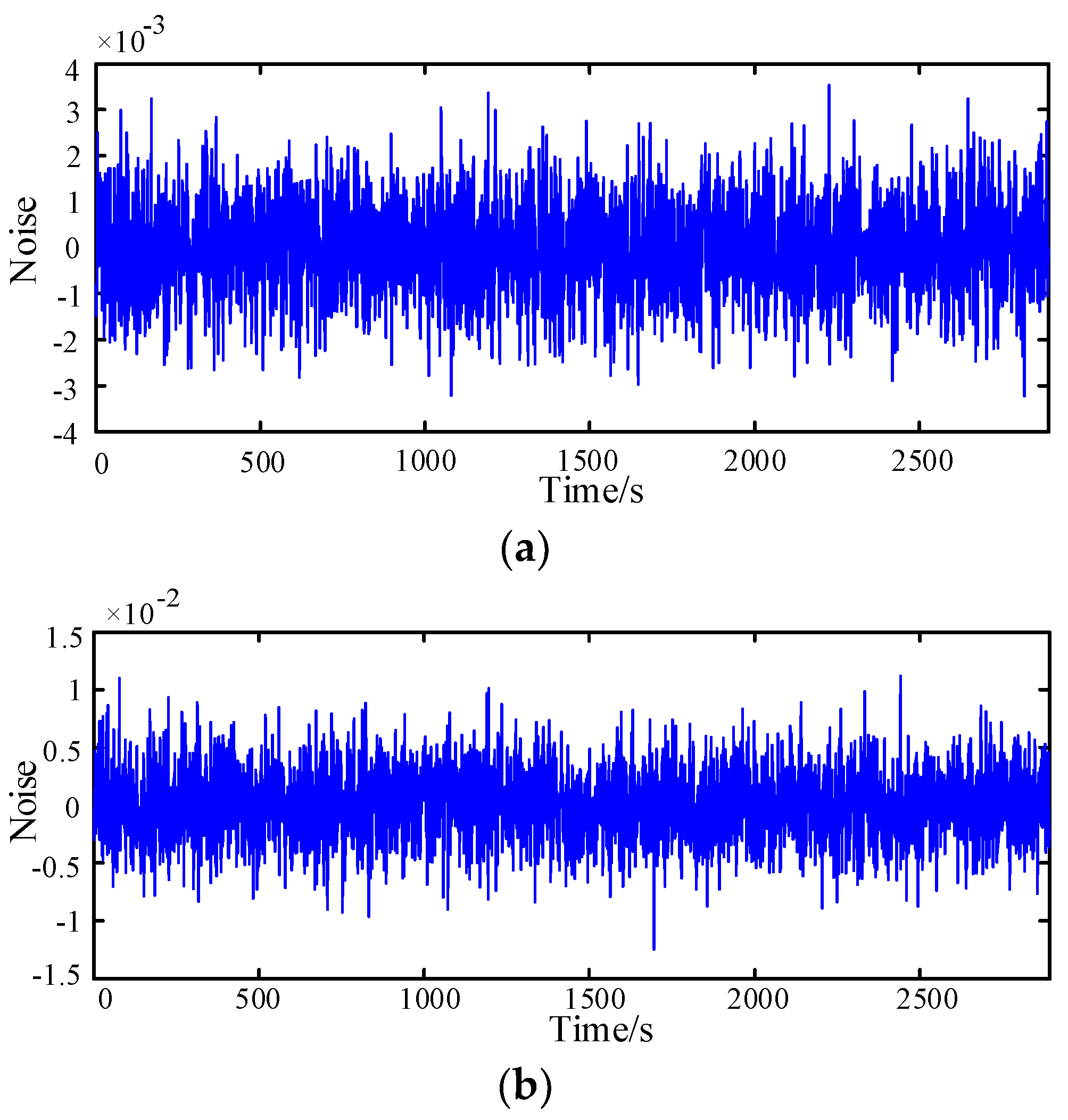
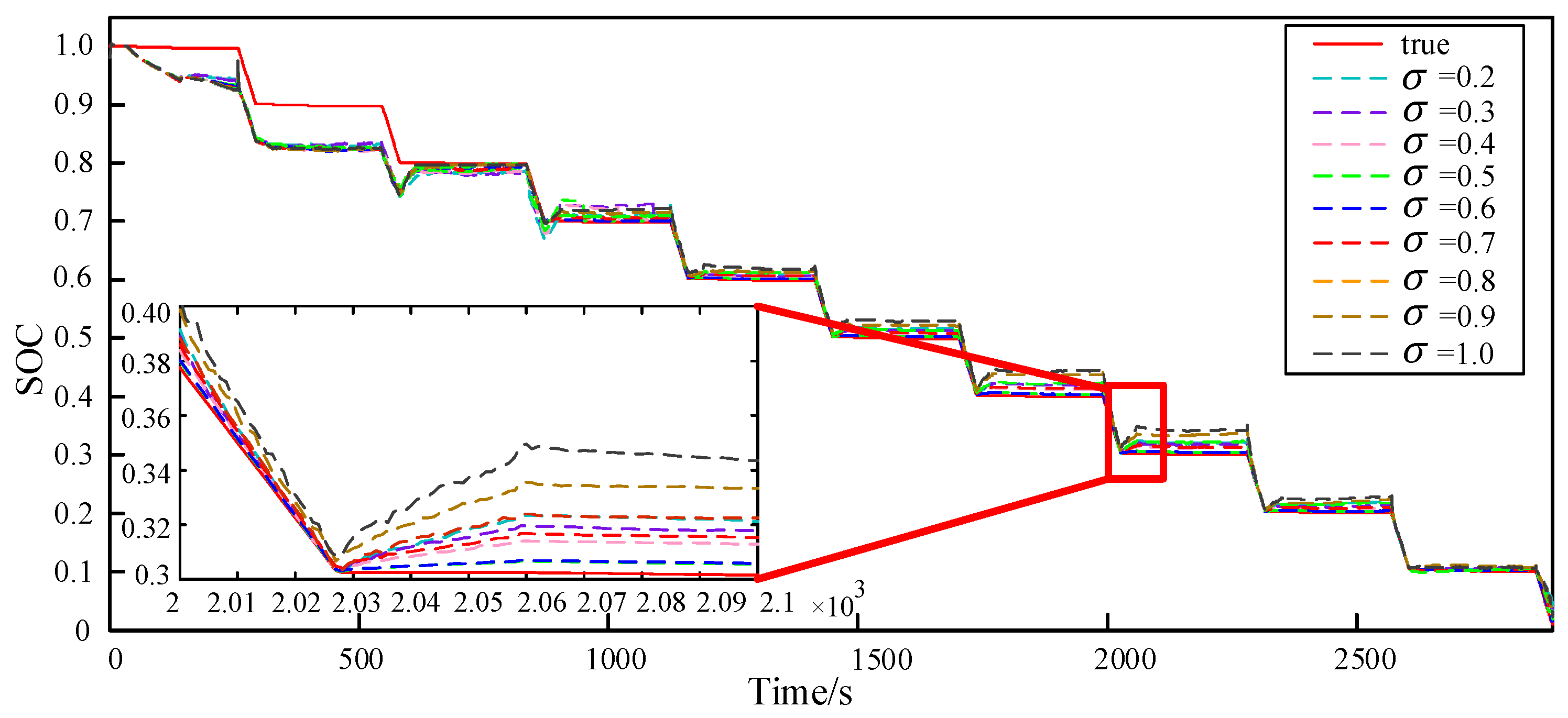
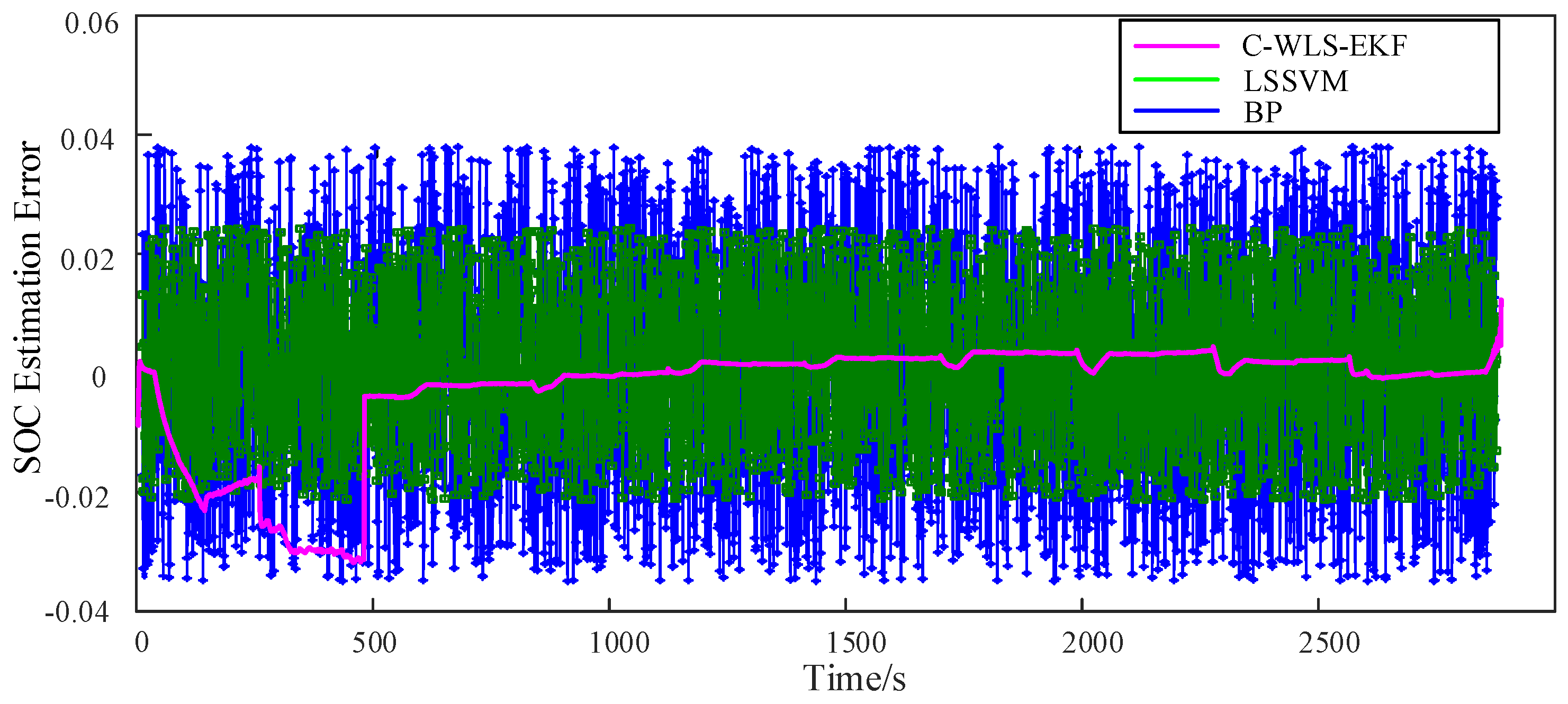
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hannan, M.A.; Hoque, M.M.; Peng, S.E.; Uddin, M.N. Lithium-ion battery charge equalization algorithm for electric vehicle applications. IEEE Trans. Ind. Appl. 2017, 53, 2541–2549. [Google Scholar] [CrossRef]
- Dong, G.; Chen, Z.; Wei, J. Sequential Monte Carlo filter for state of charge estimation of lithium-ion batteries based on auto regressive exogenous model. IEEE Trans Ind. Electron. 2019, 66, 8533–8544. [Google Scholar] [CrossRef]
- Wei, Z.; Leng, F.; He, Z.; Zhang, W.; Li, K. Online state of charge and state of health estimation for a Lithium-Ion battery based on a data–model fusion method. Energies 2018, 11, 1810. [Google Scholar] [CrossRef] [Green Version]
- Pan, H.; Lv, Z.; Lin, W.; Li, J.; Chen, L. State of charge estimation of lithium-ion batteries using a grey extended Kalman filter and a novel open-circuit voltage model. Energy 2017, 138, 764–775. [Google Scholar] [CrossRef]
- Ding, N.; Prasad, K.; Lie, T.T.; Cui, J. State of charge estimation of a composite lithium-based battery model based on an improved extended kalman filter algorithm. Inventions 2019, 4, 66. [Google Scholar] [CrossRef] [Green Version]
- Feng, F.; Lu, R.; Zhu, C. A combined state of charge estimation method for lithium-ion batteries used in a wide ambient temperature range. Energies 2014, 7, 1–29. [Google Scholar] [CrossRef] [Green Version]
- Dong, G.; Wei, J.; Zhang, C.; Chen, Z. Online state of charge estimation and open circuit voltage hysteresis modeling of LiFePO4 battery using invariant imbedding method. Appl. Energy 2016, 162, 163–171. [Google Scholar] [CrossRef]
- Tong, S.; Lacap, J.H.; Park, J.W. Battery state of charge estimation using a load-classifying neural network. J. Energy Storage 2016, 7, 236–243. [Google Scholar] [CrossRef]
- Yang, F.; Li, W.; Li, C.; Miao, Q. State-of-charge estimation of lithium-ion batteries based on gated recurrent neural network. Energy 2019, 175, 66–75. [Google Scholar] [CrossRef]
- Chen, B.; Xing, L.; Xu, B.; Zhao, H.; Príncipe, J.C. Insights into the robustness of minimum error entropy estimation. IEEE Trans. Neural Netw. Learn Syst. 2016, 29, 731–737. [Google Scholar] [CrossRef]
- Muhammad, S.; Rafique, M.U.; Li, S.; Shao, Z.; Wang, Q.; Guan, N. A robust algorithm for state-of-charge estimation with gain optimization. IEEE Trans. Ind. Inform. 2017, 13, 2983–2994. [Google Scholar] [CrossRef]
- Meng, J.; Stroe, D.I.; Ricco, M.; Luo, G.; Teodorescu, R. A simplified model-based state-of-charge estimation approach for lithium-ion battery with dynamic linear model. IEEE Trans. Ind. Electron. 2018, 66, 7717–7727. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Chen, J.; Lan, F. Enhanced online model identification and state of charge estimation for lithium-ion battery under noise corrupted measurements by bias compensation recursive least squares. J. Power Sources 2020, 456, 227984. [Google Scholar] [CrossRef]
- Zhi, L.; Peng, Z.; Zhi, W.; Qiang, S.; Yinan, R. State of charge estimation for Li-ion battery based on extended Kalman filter. Energy Procedia 2017, 105, 3515–3520. [Google Scholar] [CrossRef]
- Wang, Q.; Feng, X.; Zhang, B.; Gao, T.; Yang, Y. Power battery state of charge estimation based on extended Kalman filter. J. Renew. Sustain. Energy 2019, 11, 014302. [Google Scholar] [CrossRef]
- Baccouche, I.; Jemmali, S.; Manai, B.; Omar, N.; Amara, N. Improved OCV model of a Li-ion NMC battery for online SOC estimation using the extended Kalman filter. Energies 2017, 10, 764. [Google Scholar] [CrossRef] [Green Version]
- Yan, W.; Zhang, B.; Zhao, G.; Tang, S.; Niu, G.; Wang, X. A battery management system with a Lebesgue-sampling-based extended Kalman filter. IEEE Trans. Ind. Electron. 2018, 66, 3227–3236. [Google Scholar] [CrossRef]
- Lai, X.; Wang, S.; He, L.; Zhou, L.; Zheng, Y. A hybrid state-of-charge estimation method based on credible increment for electric vehicle applications with large sensor and model errors. J. Energy Storage 2020, 27, 101106. [Google Scholar] [CrossRef]
- Zhu, Q.; Xu, M.; Liu, W.; Zheng, M. A state of charge estimation method for lithium-ion batteries based on fractional order adaptive extended kalman filter. Energy 2019, 187, 115880. [Google Scholar] [CrossRef]
- Xiao, R.; Shen, J.; Li, X.; Yan, W.; Pan, E.; Chen, Z. Comparisons of modeling and state of charge estimation for lithium-ion battery based on fractional order and integral order methods. Energies 2016, 9, 184. [Google Scholar] [CrossRef]
- Wei, Z.; Meng, S.; Xiong, B.; Ji, D.; Tseng, K.J. Enhanced online model identification and state of charge estimation for lithium-ion battery with a FBCRLS based observer. Appl. Energy 2016, 181, 332–341. [Google Scholar] [CrossRef]
- Liu, W.; Pokharel, P.P.; Principe, J.C. Correntropy: Properties and applications in non-gaussian signal processing. IEEE Trans. Signal Process 2007, 55, 5286–5298. [Google Scholar] [CrossRef]
- Chen, B.; Liu, X.; Zhao, H.; Jose, C. Maximum correntropy Kalman filter. Automatica 2017, 76, 70–77. [Google Scholar] [CrossRef] [Green Version]
- Izanloo, R.; Fakoorian, S.A.; Yazdi, H.S.; Simon, D. Kalman filtering based on the maximum correntropy criterion in the presence of non-Gaussian noise. In Proceedings of the IEEE 2016 Annual Conference on Information Science and Systems (CISS), Princeton, NJ, USA, 16–18 March 2016; pp. 500–505. [Google Scholar]
- Mohiuddin, S.M.; Qi, J. Maximum correntropy extended Kalman filtering for power system dynamic state estimation. In Proceedings of the 2019 IEEE Power & Energy Society General Meeting (PESGM), Atlanta, GA, USA, 4–8 August 2019; pp. 1–5. [Google Scholar]
- Wang, G.; Zhang, Y.; Wang, X. Iterated maximum correntropy unscented Kalman filters for non-Gaussian systems. Signal Process 2019, 163, 87–94. [Google Scholar] [CrossRef]
- Sun, Q.; Zhang, H.; Zhang, J.; Ma, W. Adaptive unscented kalman filter with correntropy loss for robust state of charge estimation of lithium-ion battery. Energies 2018, 11, 3123. [Google Scholar] [CrossRef] [Green Version]
- Nikolian, A.; Jaguemont, J.; de Hoog, J.; Goutam, S.; Omar, N.; Van Den Bossche, P.; Van Mierlo, J. Complete cell-level lithium-ion electrical ECM model for different chemistries (NMC, LFP, LTO) and temperatures (−5 °C to 45 °C)–Optimized modelling techniques. Int. J. Electr. Power Energy Syst. 2018, 98, 133–146. [Google Scholar] [CrossRef]
- Alipour, M.; Ziebert, C.; Conte, F.V.; Kizilel, R. A review on temperature-dependent electrochemical properties, aging, and performance of lithium-ion cells. Batteries 2020, 6, 35. [Google Scholar] [CrossRef]
- Shousha, M.; Prodic, A.; Marten, V.; Milios, J. Design and implementation of assisting converter-based integrated battery management system for electromobility applications. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 6, 825–842. [Google Scholar] [CrossRef]
- Shousha, M.; McRae, T.; Prodic, A.; Marten, V.; Milios, J. Design and implementation of high power density assisting step-up converter with integrated battery balancing feature. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 1068–1077. [Google Scholar] [CrossRef]
- Dang, X.; Yan, L.; Jiang, H.; Wu, X.; Sun, H. Open-circuit voltage-based state of charge estimation of lithium-ion power battery by combining controlled auto-regressive and moving average modeling with feedforward-feedback compensation method. Int. J. Electr. Power Energy Syst. 2017, 90, 27–36. [Google Scholar] [CrossRef]
- Pérez, G.; Garmendia, M.; Reynaud, J.F.; Crego, J.; Viscarret, U. Enhanced closed loop State of Charge estimator for lithium-ion batteries based on Extended Kalman Filter. Appl. Energy 2015, 155, 834–845. [Google Scholar] [CrossRef]
- Guo, F.; Hu, G.; Xiang, S.; Zhou, P.; Hong, R.; Xiong, N. A multi-scale parameter adaptive method for state of charge and parameter estimation of lithium-ion batteries using dual Kalman filters. Energy 2019, 178, 79–88. [Google Scholar] [CrossRef]
- Chen, B.; Wang, J.; Zhao, H.; Zheng, N.; Príncipe, J.C. Convergence of a fixed-point algorithm under maximum correntropy criterion. IEEE Signal Process Lett. 2015, 22, 1723–1727. [Google Scholar] [CrossRef]
- Liu, X.; Qu, H.; Zhao, J.; Chen, B. Extended Kalman filter under maximum correntropy criterion. In Proceedings of the 2016 International Joint Conference on Neural Networks (IJCNN), Vancouver, BC, Canada, 24–29 July 2016; pp. 1733–1737. [Google Scholar]
- Ma, W.; Qu, H.; Gui, G.; Xu, L.; Zhao, J.; Chen, B. Maximum correntropy criterion based sparse adaptive filtering algorithms for robust channel estimation under non-Gaussian environments. J. Frankl. Inst. 2015, 352, 2708–2727. [Google Scholar] [CrossRef] [Green Version]
- Chen, B.; Li, Y.; Dong, J.; Lu, N.; Qin, J. Common spatial patterns based on the quantized minimum error entropy criterion. IEEE Trans. Syst. Man Cybern. Syst. 2018, 1–12. [Google Scholar] [CrossRef]
- Duan, J.; Qiu, X.; Ma, W.; Tian, X.; Shang, D. Electricity consumption forecasting scheme via improved LSSVM with maximum correntropy criterion. Entropy 2018, 20, 112. [Google Scholar] [CrossRef] [Green Version]
- Zhao, J.; Mili, L. A framework for robust hybrid state estimation with unknown measurement noise statistics. IEEE Trans. Ind. Inform. 2017, 14, 1866–1875. [Google Scholar] [CrossRef]
- Ma, W.; Qiu, J.; Liu, X.; Xiao, G.; Duan, J.; Chen, B. Unscented kalman filter with generalized correntropy loss for robust power system forecasting-aided state estimation. IEEE Trans. Ind. Inform. 2019, 15, 6091–6100. [Google Scholar] [CrossRef]
- Ma, W.; Duan, J.; Man, W.; Zhao, H.; Chen, B. Robust kernel adaptive filters based on mean p-power error for noisy chaotic time series prediction. Eng. Appl. Artif. Intel. 2017, 58, 101–110. [Google Scholar] [CrossRef]
- Ma, W.; Duan, J.; Chen, B.; Gui, G.; Man, W. Recursive generalized maximum correntropy criterion algorithm with sparse penalty constraints for system identification. Asian J. Control. 2017, 19, 1164–1172. [Google Scholar] [CrossRef]
- Ma, W.; Qiu, X.; Duan, J.; Li, Y.; Chen, B. Kernel recursive generalized mixed norm algorithm. J. Frankl. Inst. 2018, 355, 1596–1613. [Google Scholar] [CrossRef]
- Schmitt, L.; Fichter, W. Cramér-Rao lower bound for state-constrained nonlinear filtering. IEEE Signal Process Lett. 2017, 24, 1882–1885. [Google Scholar] [CrossRef]
- Sayin, M.O.; Vanli, N.D.; Kozat, S.S. A novel family of adaptive filtering algorithms based on the logarithmic cost. IEEE Trans. Signal Process 2014, 62, 4411–4424. [Google Scholar] [CrossRef] [Green Version]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SOC/% | Voltage/V | SOC/% | Voltage/V |
|---|---|---|---|
| 100 | 3.635 | 50 | 3.374 |
| 90 | 3.432 | 40 | 3.340 |
| 80 | 3.429 | 30 | 3.307 |
| 70 | 3.411 | 20 | 3.281 |
| 60 | 3.402 | 10 | 3.109 |
| Index | 8th-Order | 6th-Order |
|---|---|---|
| STD | 0.0176 | 0.0059 |
| R-square | 0.0985 | 0.0998 |
| Parameter | Value |
|---|---|
| 39 | |
| 2 | |
| 17.4 | |
| 7.88 | |
| 1.14 |
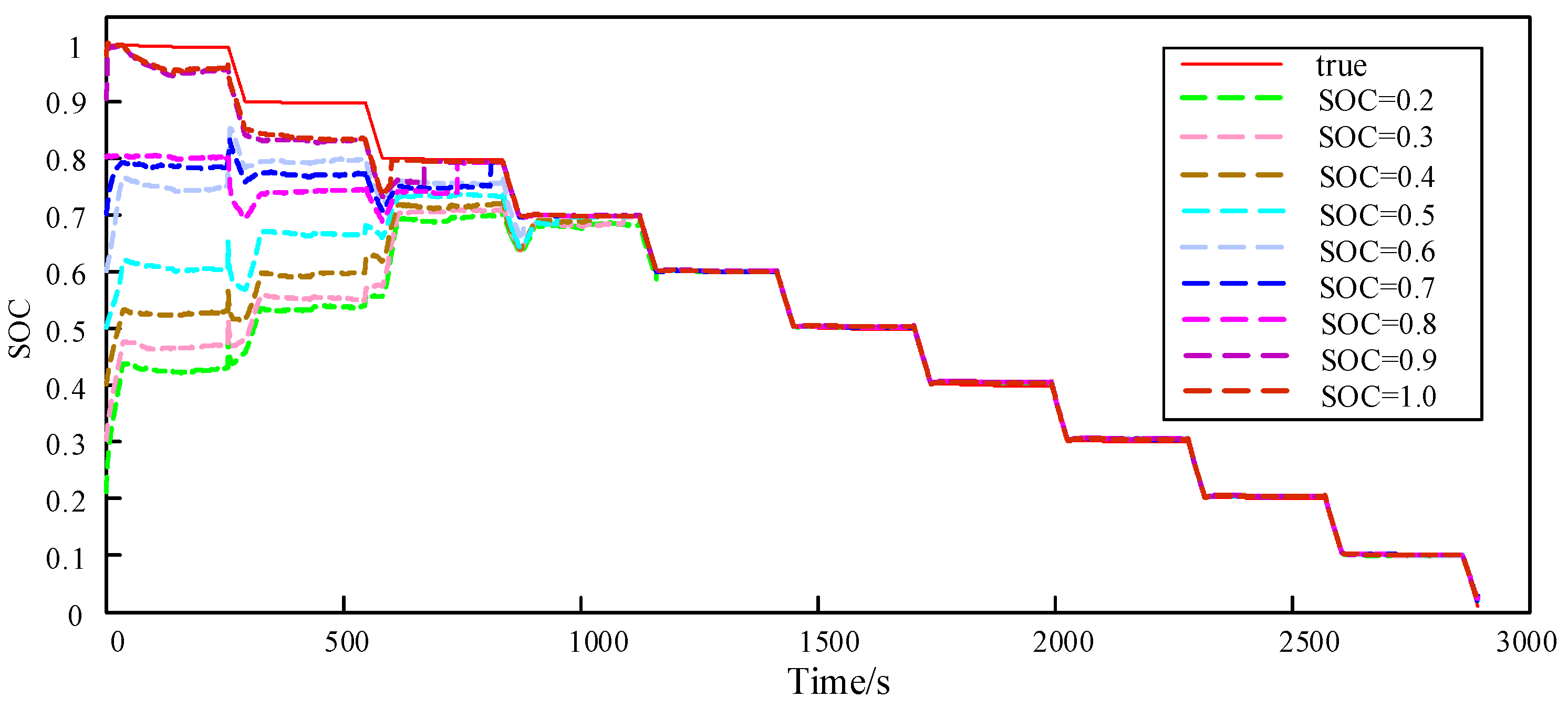
| 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | |
|---|---|---|---|---|---|
| Estimation error (%) | 1.27 | 1.12 | 1.04 | 0.703 | 0.512 |
| 0.6 | 0.7 | 0.8 | 0.9 | 1 | |
| Estimation error (%) | 0.694 | 0.879 | 1.07 | 1.14 | 1.37 |
| Algorithm | C-WLS-EKF | C-EKF | EKF |
|---|---|---|---|
| Estimation error (%) | 0.512 | 0.771 | 1.361 |
| t(s) | 9.71 | 9.26 | 8.89 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duan, J.; Wang, P.; Ma, W.; Qiu, X.; Tian, X.; Fang, S. State of Charge Estimation of Lithium Battery Based on Improved Correntropy Extended Kalman Filter. Energies 2020, 13, 4197. https://doi.org/10.3390/en13164197
Duan J, Wang P, Ma W, Qiu X, Tian X, Fang S. State of Charge Estimation of Lithium Battery Based on Improved Correntropy Extended Kalman Filter. Energies. 2020; 13(16):4197. https://doi.org/10.3390/en13164197
Chicago/Turabian StyleDuan, Jiandong, Peng Wang, Wentao Ma, Xinyu Qiu, Xuan Tian, and Shuai Fang. 2020. "State of Charge Estimation of Lithium Battery Based on Improved Correntropy Extended Kalman Filter" Energies 13, no. 16: 4197. https://doi.org/10.3390/en13164197
APA StyleDuan, J., Wang, P., Ma, W., Qiu, X., Tian, X., & Fang, S. (2020). State of Charge Estimation of Lithium Battery Based on Improved Correntropy Extended Kalman Filter. Energies, 13(16), 4197. https://doi.org/10.3390/en13164197