Conventional and Second Order Sliding Mode Control of Permanent Magnet Synchronous Motor Fed by Direct Matrix Converter: Comparative Study †


Abstract
:1. Introduction
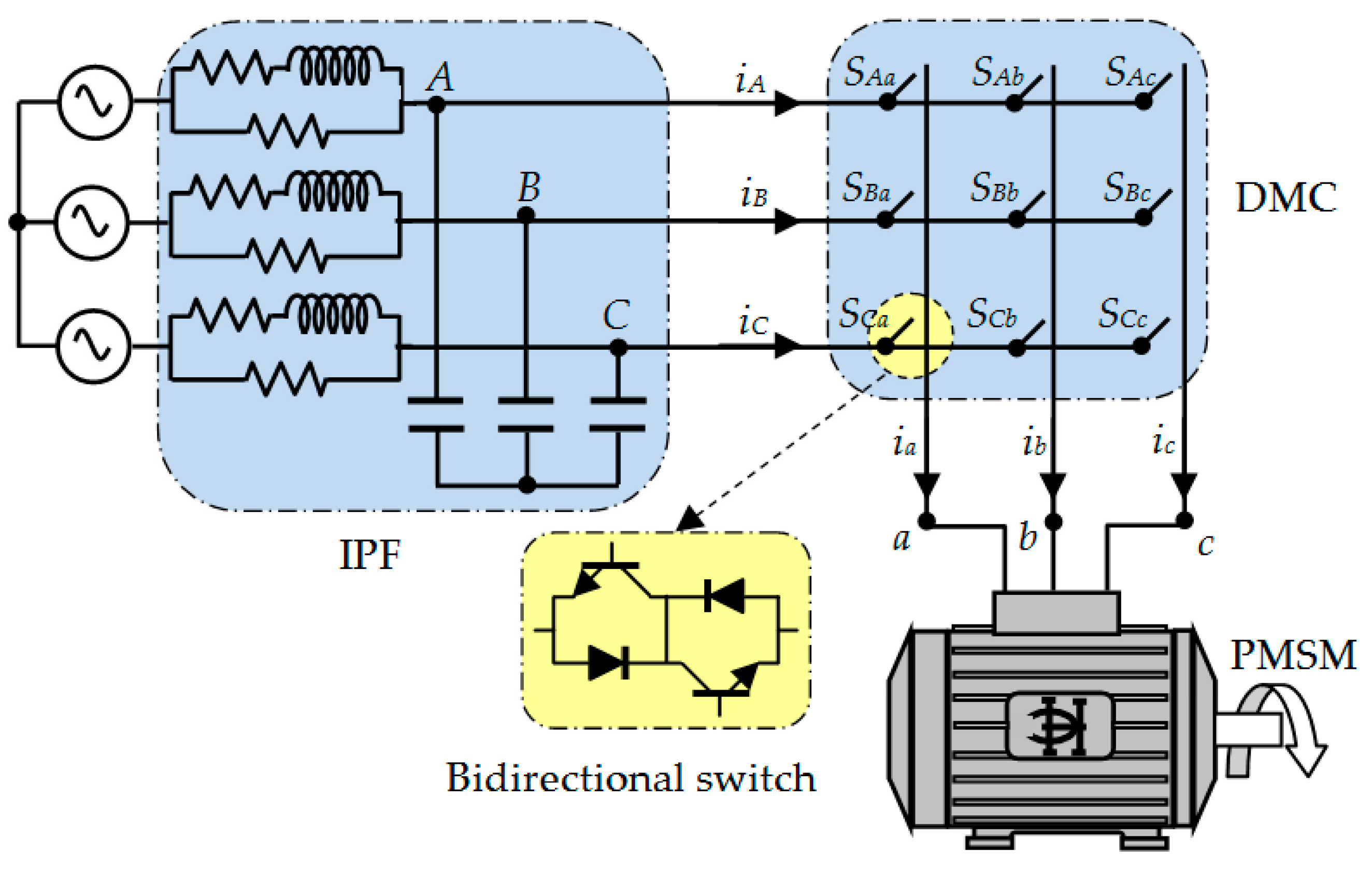
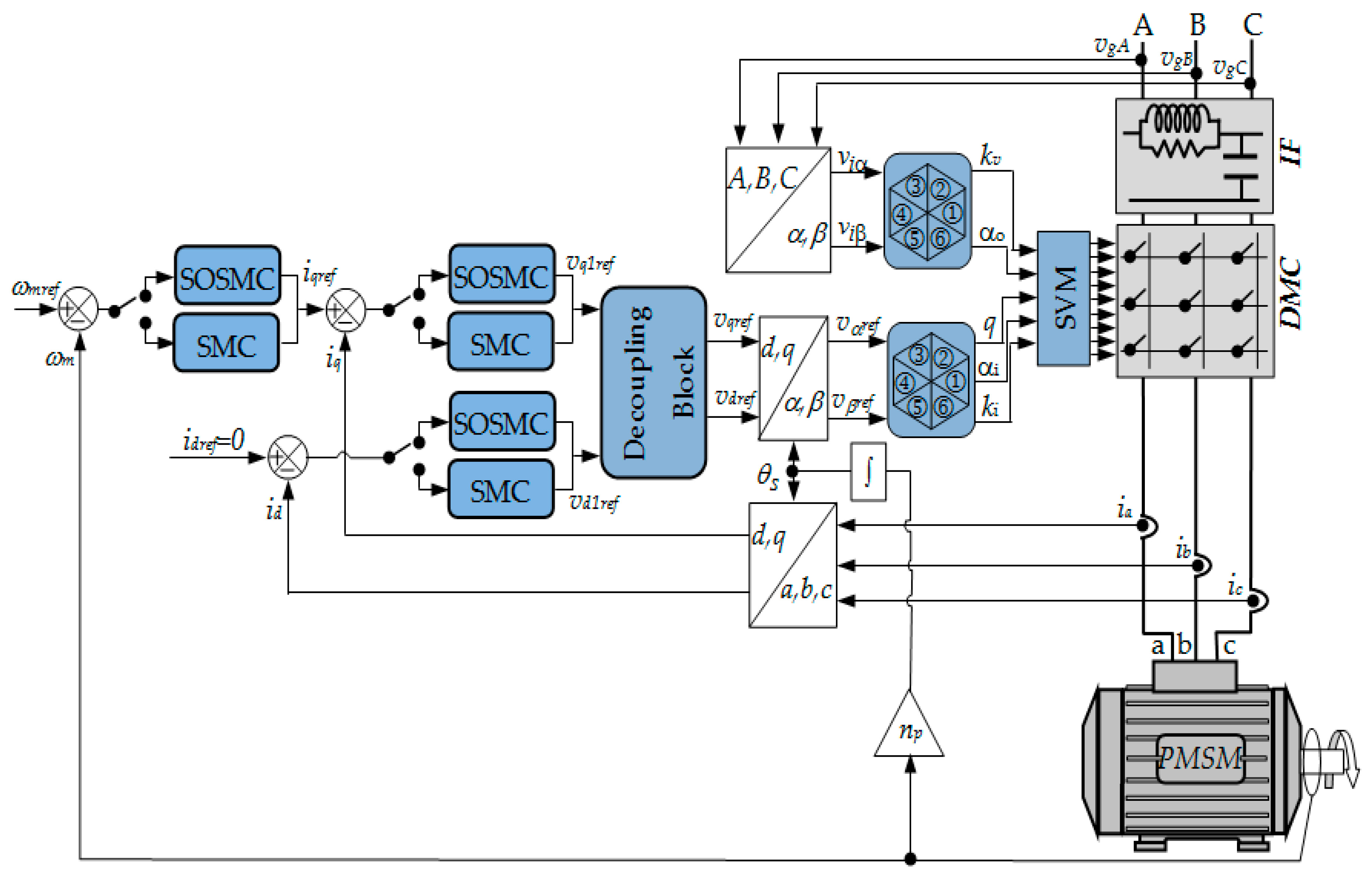
2. Modeling and Control Strategy
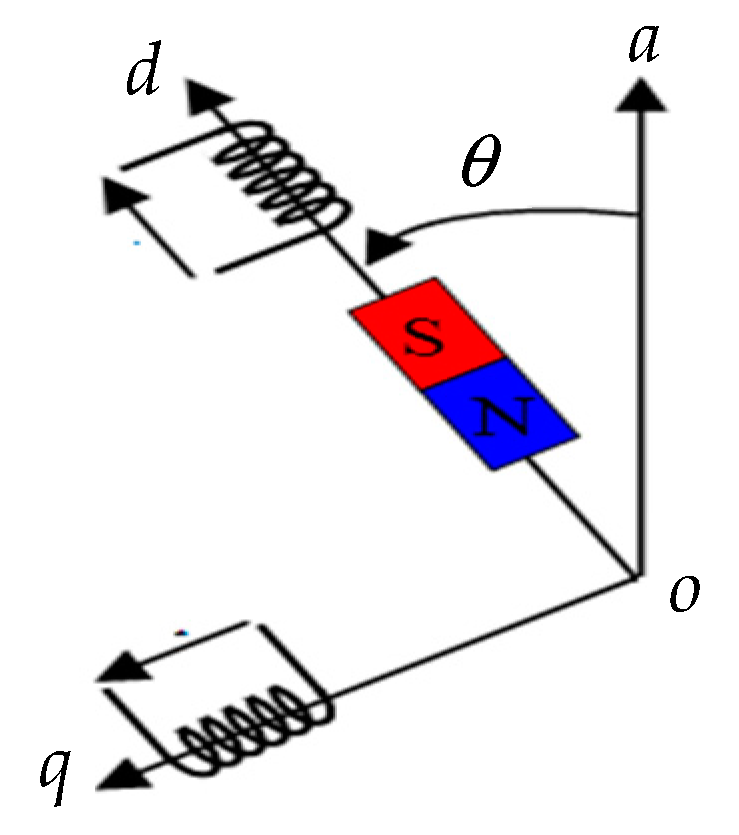
2.1. Modeling of PMSM
- vd, vq, id, iq, φd, φq: d-q components of stator voltages, currents, and flux;
- φpf: the permanent rotor flux;
- Rs, Ld, Lq: the resistance, and direct and quadratic inductances of the stator;
- TL, ωsyn, ωm, np: the load torque, synchronous and rotor speeds, and the number of pole pairs;
- J, B: the rotor inertia and the viscous friction coefficient.
2.2. Stator Current Orientation Control
2.3. Design of Conventional Sliding Mode Controllers (SMC)
2.3.1. For the Speed
2.3.2. For the id and iq
2.4. Design of Second Order Sliding Mode Controllers (SOSMC)
2.4.1. For the Speed
- , , .
- ψ(t,x) and ζ(t,x) are uncertain functions.
2.4.2. For the id and iq
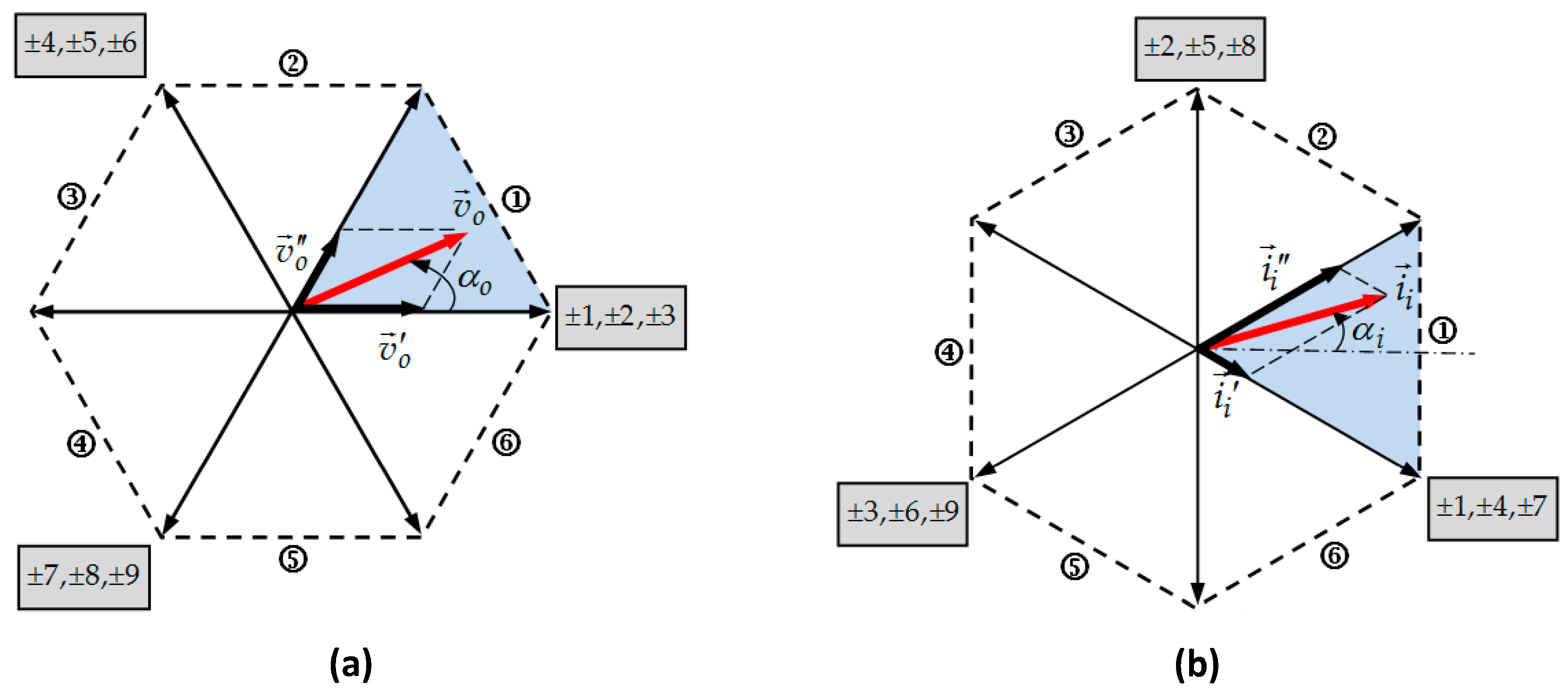
3. SVM Switching Algorithm for DMC
- qv = Vo/Vi is ratio of voltage;
- αo, αi, kv, and ki are the phase angles and the sector number of and , respectively.
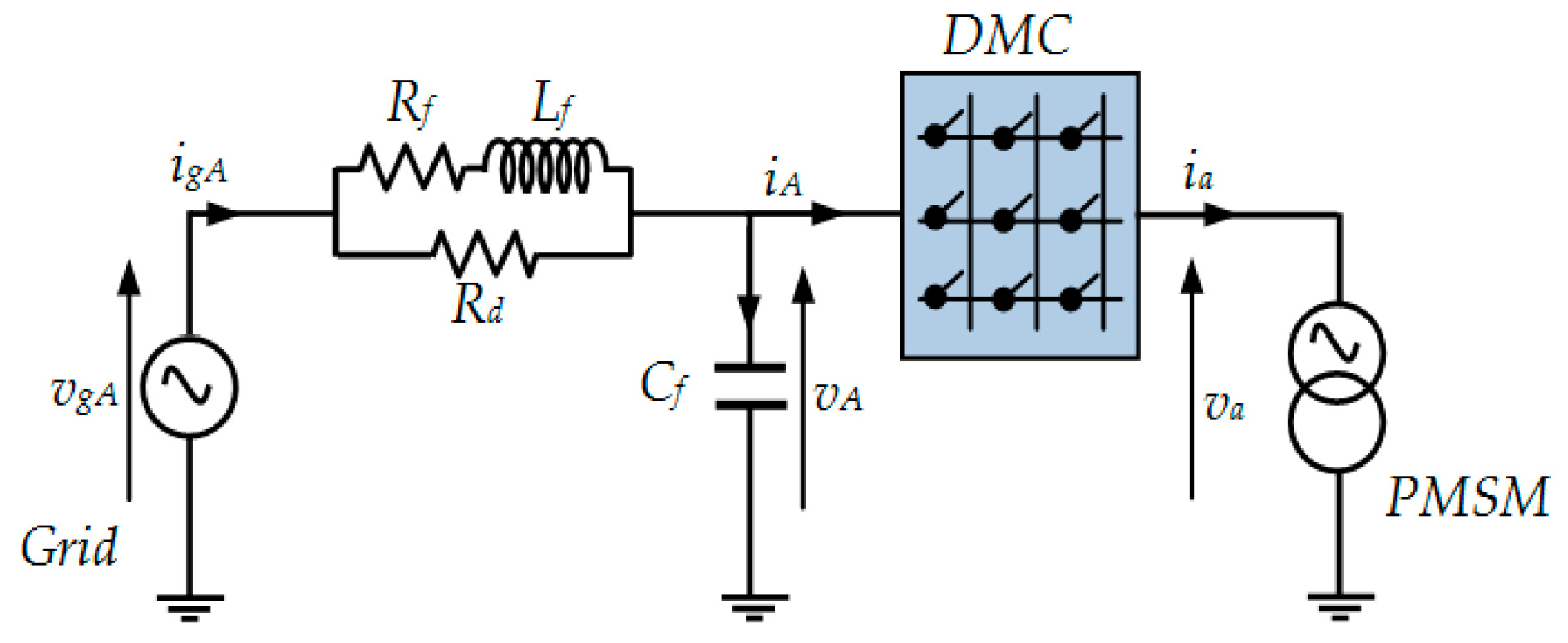
4. Damped Passive Input Filter
5. Results and Discussions
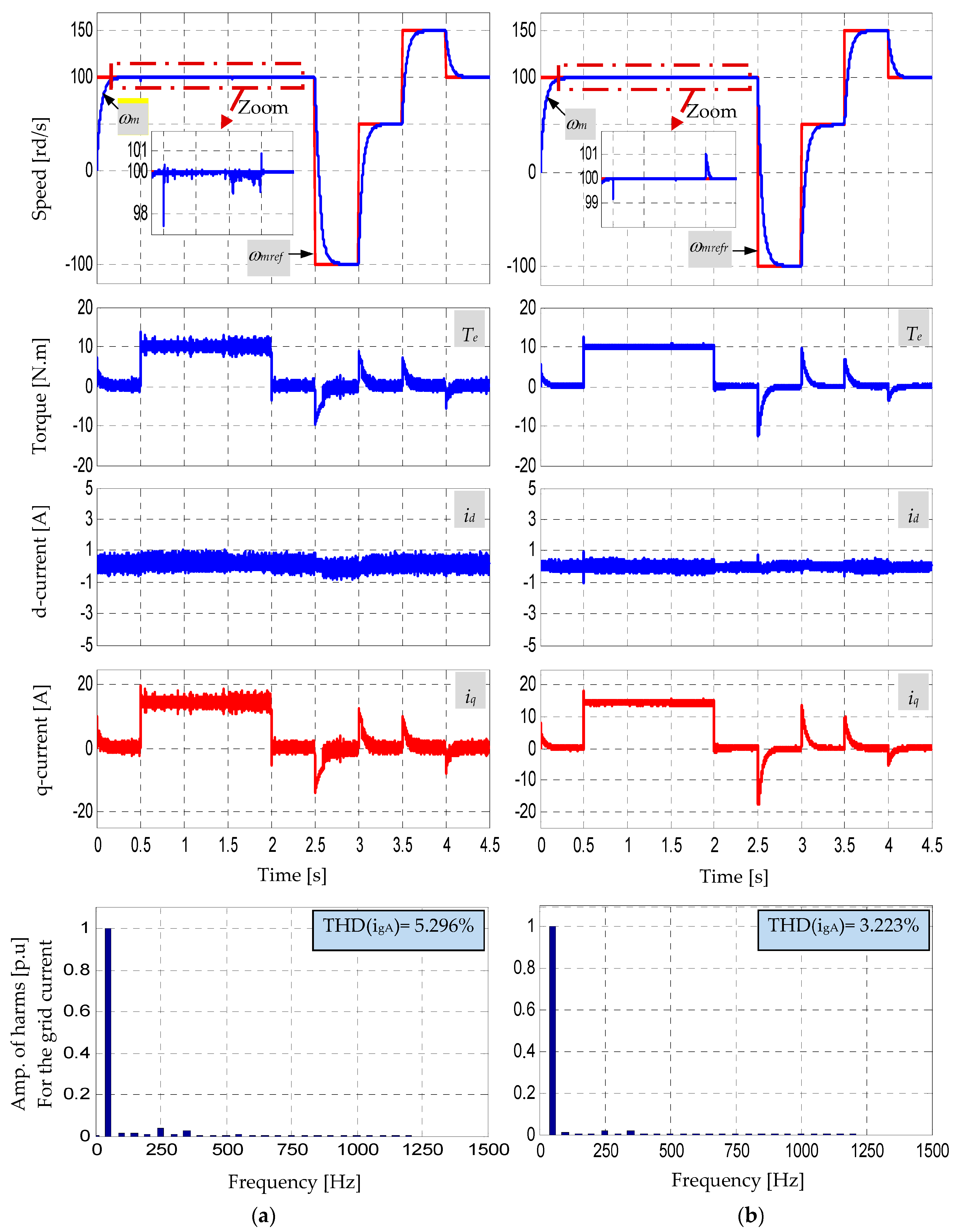
- Startup mode (unloaded TL = 0), with a desired speed 100 rd/s (0–0.5 s);
- From 0.5 to 2 s, the motor is loaded by a load of 10 N m, and after 2 s, the motor is unloaded again;
- Parameters variation: Stator resistance from the value Rs to 2Rs (at t = 1.5 s) and rotor inertia from J to 2J (at t = 1 s);
- Rotation direction reversing (2.5–3 s);
- Under-speed operation (3–3.5 s);
- Over-speed operation (3.5–4 s).
- For the conventional SMC: from Figure 6a, it can be seen that the speed has a good tracking of its reference trajectory with a very short response time, with the exception of a negligible exceeding at the moment of application of the load torque (0.5–2 s). As can be seen, no influence was detected from the variation of the parameters (variation of Rs and J at t = 1.5 s and t = 1 s) on the performance of the control. According to the id and iq curves, it can be noted that a decoupled control has been maintained regardless of the operating mode of the drive system. However, the presence of chattering in the torque and current responses, as well as the high harmonic rate (THD = 5.296%; greater than 5%, it is not compliant to IEEE standard) constitute the weak points of the conventional SMC.
- For the SOSMC: from Figure 6b, the good tracking, rapid response, decoupling between id and iq, and the insensitivity to parameters variation were also obtained by the SOSMC. Besides these advantages, this type of controller allows the attenuation of chattering, as well as it allows the obtainingof a low rate of harmonic distortion (THD = 3.223, compliant with IEEE standard).To present this study in a more comprehensive way, Table 4, which summarizes all the points mentioned above, has been used.
6. Conclusions
Funding
Conflicts of Interest
References
- Dendouga, A.; Dendouga, A. High performance vector control of permanent magnet synchronous motor fed by direct SVM matrix converter. In Proceedings of the IEEE 4th International Conference on Power Electronics and Their Applications (ICPEA), Elazig, Turkey, 25–27 September 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Dendouga, A. A comparative study between the PI and SM controllers used by nonlinear control of induction motor fed by SVM matrix converter. IETE J. Res. 2020, 1–11. [Google Scholar] [CrossRef]
- Pipolo, S.; Formentini, A.; Trentin, A.; Zanchetta, P.; Calvini, M.; Venturini, M. A New Modulation Approach for Matrix Converter. In Proceedings of the IEEE 2019 10th International Conference on Power Electronics and ECCE Asia (ICPE 2019—ECCE Asia), Busan, Korea, 27–30 May 2019; pp. 1021–1027. [Google Scholar]
- Orcioni, S.; Biagetti, G.; Crippa, P.; Falaschetti, L. A Driving Technique for AC-AC Direct Matrix Converters Based on Sigma-Delta Modulation. Energies 2019, 12, 1103. [Google Scholar] [CrossRef] [Green Version]
- Toledo, S.; Maqueda, E.; Rivera, M.; Gregor, R.; Wheeler, P.; Romero, C. Improved Predictive Control in Multi-Modular Matrix Converter for Six-Phase Generation Systems. Energies 2020, 13, 2660. [Google Scholar] [CrossRef]
- Yao, P.; Jiang, X. An optimal six vector switching pattern in matrix converters for reducing harmonics and switching loss. CSEE J. Power Energy Syst. 2020. [Google Scholar] [CrossRef]
- Nguyen, H.-N.; Nguyen, M.-K.; Duong, T.-D.; Tran, T.-T.; Lim, Y.-C.; Choi, J.-H. A Study on Input Power Factor Compensation Capability of Matrix Converters. Electronics 2020, 9, 82. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, H.; Nguyen, T.D.; Lee, H. A modulation strategy to eliminate CMV for matrix converters with input power factor compensation. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 6237–6242. [Google Scholar] [CrossRef]
- Siwek, P. Input filter optimization for a DTC driven matrix converter-fed PMSM drive. In Proceedings of the 2018 IEEE 23rd International Conference on Methods & Models in Automation & Robotics (MMAR), Miedzyzdroje, Poland, 27–30 August 2018; pp. 35–40. [Google Scholar] [CrossRef]
- Wang, X.; Lin, H.; Feng, B.; Lyu, Y. Damping of input LC filter resonance based on virtual resistor for matrix converter. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 15–20 September 2012; pp. 3910–3916. [Google Scholar] [CrossRef]
- Deng, W.; Li, S. Direct torque control of matrix converter-fed PMSM drives using multi-dimensional switching table for common-mode voltage minimization. IEEE Trans. Power Electron. 2020. [Google Scholar] [CrossRef]
- Bounasla, N.; Hemsas, K.E. Second order sliding mode control of a permanent magnet synchronous motor. In Proceedings of the IEEE 14th International Conference on Sciences and Techniques of Automatic Control & Computer Engineering (STA), Sousse, Tunisia, 20–22 December 2013; pp. 535–539. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, Y. A universal maximum torque per ampere method for permanent magnet synchronous machines. In Proceedings of the IEEE 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Zhang, J.; Yang, H.; Wang, T.; Li, L.; Dorrell, D.G.; Lu, D.D. Field-oriented control based on hysteresis band current controller for a permanent magnet synchronous motor driven by a direct matrix converter. IET Power Electron. 2018, 11, 1277–1285. [Google Scholar] [CrossRef]
- Yan, Y.; Zhao, J.; Xia, C.; Shi, T. Direct torque control of matrix converter-fed permanent magnet synchronous motor drives based on master and slave vectors. IET Power Electron. 2015, 8, 288–296. [Google Scholar] [CrossRef]
- Peng, J.; Zhang, N.; He, L.; Shi, Q.; Lu, J. Sensorless vector control of permanent magnet synchronous motor based on DSP. In Proceedings of the IEEE 3rd Conference on Vehicle Control and Intelligence (CVCI), Hefei, China, 21–22 September 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Xiao, M.; Shi, T.; Yan, Y.; Xu, W.; Xia, C. Predictive torque control of permanent magnet synchronous motors using flux vector. IEEE Trans. Ind. Appl. 2018, 54, 4437–4446. [Google Scholar] [CrossRef]
- Wang, T.; Liu, C.; Lei, G.; Guo, Y.; Zhu, J. Model predictive direct torque control of permanent magnet synchronous motors with extended set of voltage space vectors. IET Electr. Power Appl. 2017, 11, 1376–1382. [Google Scholar] [CrossRef]
- Feng, Y.; Zhao, H.; Zhao, M.; Chen, H. A feedback linearization control scheme based on direct torque control for permanent magnet synchronous motor. In Proceedings of the 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 87–92. [Google Scholar] [CrossRef]
- Fridman, L.; Levant, A. Higher order sliding modes. In Book Sliding Mode Control in Engineering; Barbot, J.P., Perruguett, W., Eds.; Marcel Dekker: New York, NY, USA, 2002; pp. 53–101. [Google Scholar] [CrossRef]
- Borlaug, I.-L.G. Higher-Order Sliding Mode Control. Master’s Thesis, Norwegian University of Science and Technology, Trondheim, Norway, June 2017. [Google Scholar]
- Utkin, V.; Poznyakb, A.; Orlovc, Y.; Polyakov, A. Conventional and high order sliding mode control. J. Frankl. Inst. 2020. [Google Scholar] [CrossRef]
- Shtessel, Y.; Edwards, C.; Fridman, L.; Levant, A. Sliding Mode Control and Observation; Springer: New York, NY, USA, 2014; pp. 1–356. [Google Scholar] [CrossRef]
- Gu, P.; Wang, X.; Reitz, M. High order sliding mode control of permanent magnet synchronous generator-based wind energy conversion systems. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Levant, A. Robust exact differentiation via sliding mode technique. Automatica 1998, 34, 379–384. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Switching Configuration | Switches On | Switching Configuration | Switches On |
|---|---|---|---|
| +1 | SaASbBSbC | −1 | SbASaBSaC |
| +2 | SbAScBScC | −2 | ScASbBSbC |
| +3 | ScASaBSaC | −3 | SaAScBScC |
| +4 | SbASaBSbC | −4 | SaASbBSaC |
| +5 | ScASbBScC | −5 | SbAScBSbC |
| +6 | SaAScBSaC | −6 | ScASaBScC |
| +7 | SbASbBSaC | −7 | SaASaBSbC |
| +8 | ScAScBSbC | −8 | SbASbBScC |
| +9 | SaASaBScC | −9 | ScAScBSaC |
| 0a | SaASaBSaC | 0b | SbASbBSbC |
| 0c | ScAScBScC |
| Sector Number of | |||||||
|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | ||
| Switching Times | δ1δ2δ3δ4 | δ1δ2δ3δ4 | δ1δ2δ3δ4 | δ1δ2δ3δ4 | δ1δ2δ3δ4 | δ1δ2δ3δ4 | |
| Sector number ii | 1 | −7 +9 +1 −3 | +4 −6 −7 +9 | −1 +3 +4 −6 | +7 −9 −1 +3 | −4 +6 +7 −9 | +1 −3 −4 +6 |
| 2 | +9 −8 −3 +2 | −6 +5 +9 −8 | +3 −2 −6 +5 | −9 +8 +3 −2 | +6 −5 −9 +8 | −3 +2 +6 −5 | |
| 3 | −8 +7 +2 −1 | +5 −4 −8 +7 | −2 +1 +5 −4 | +8 −7 −2 +1 | −5 +4 +8 −7 | +2 −1 −5 +4 | |
| 4 | +7 −9 −1 +3 | −4 +6 +7 −9 | +1 −3 −4 +6 | −7 +9 +1 −3 | +4 −6 −7 +9 | −1 +3 +4 −6 | |
| 5 | −9 +8 +3 −2 | +6 −5 −9 +8 | −3 +2 +6 −5 | +9 −8 −3 +2 | −6 +5 +9 −8 | +3 −2 −6 +5 | |
| 6 | +8 −7 −2 +1 | −5 +4 +8 −7 | +2 −1 −5 +4 | −8 +7 +2 −1 | +5 −4 −8 +7 | −2 +1 +5 −4 | |
| PMSM | ||||||||
| Pn | Rs | Ld | Lq | Φf | J | B | np | |
| 1.5 kW | 1.4 Ω | 0.0066 H | 0.0058 H | 0.1546 Wb | 0.00176 kg m2 | 0.00038 Nm/rd | 3 | |
| Passive Filter | ||||||||
| Rd | Rf | Lf | Cf | |||||
| 30 Ω | 0.1 Ω | 0.1 H | 47 μF | |||||
| SOSMC | ||||||||
| kω1 | kω2 | kd1 | kd2 | kq1 | kq2 | |||
| 4.7434 | 11 | 33.5 | 550 | 23.7 | 275 | |||
| SMC | ||||||||
| kω | kd | kq | ||||||
| 5 | 100 | 50 | ||||||
| Controller | Tracking | Response Time | Decoupled Control | Chattering Existence | THD |
|---|---|---|---|---|---|
| SMC | good | good | good | high | high (>5%) |
| SOSMC | good | good | good | low | low (<5%) |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dendouga, A. Conventional and Second Order Sliding Mode Control of Permanent Magnet Synchronous Motor Fed by Direct Matrix Converter: Comparative Study. Energies 2020, 13, 5093. https://doi.org/10.3390/en13195093
Dendouga A. Conventional and Second Order Sliding Mode Control of Permanent Magnet Synchronous Motor Fed by Direct Matrix Converter: Comparative Study. Energies. 2020; 13(19):5093. https://doi.org/10.3390/en13195093
Chicago/Turabian StyleDendouga, Abdelhakim. 2020. "Conventional and Second Order Sliding Mode Control of Permanent Magnet Synchronous Motor Fed by Direct Matrix Converter: Comparative Study" Energies 13, no. 19: 5093. https://doi.org/10.3390/en13195093
APA StyleDendouga, A. (2020). Conventional and Second Order Sliding Mode Control of Permanent Magnet Synchronous Motor Fed by Direct Matrix Converter: Comparative Study. Energies, 13(19), 5093. https://doi.org/10.3390/en13195093