Particle Filter-Based Electricity Load Prediction for Grid-Connected Microgrid Day-Ahead Scheduling


 ,
,  and
and 
Abstract
:1. Introduction
2. Deterministic Grid-Connected Microgrid Day-Ahead Scheduling Formulation
3. Particle Filtering Based Prediction
4. Case Studies and Validations
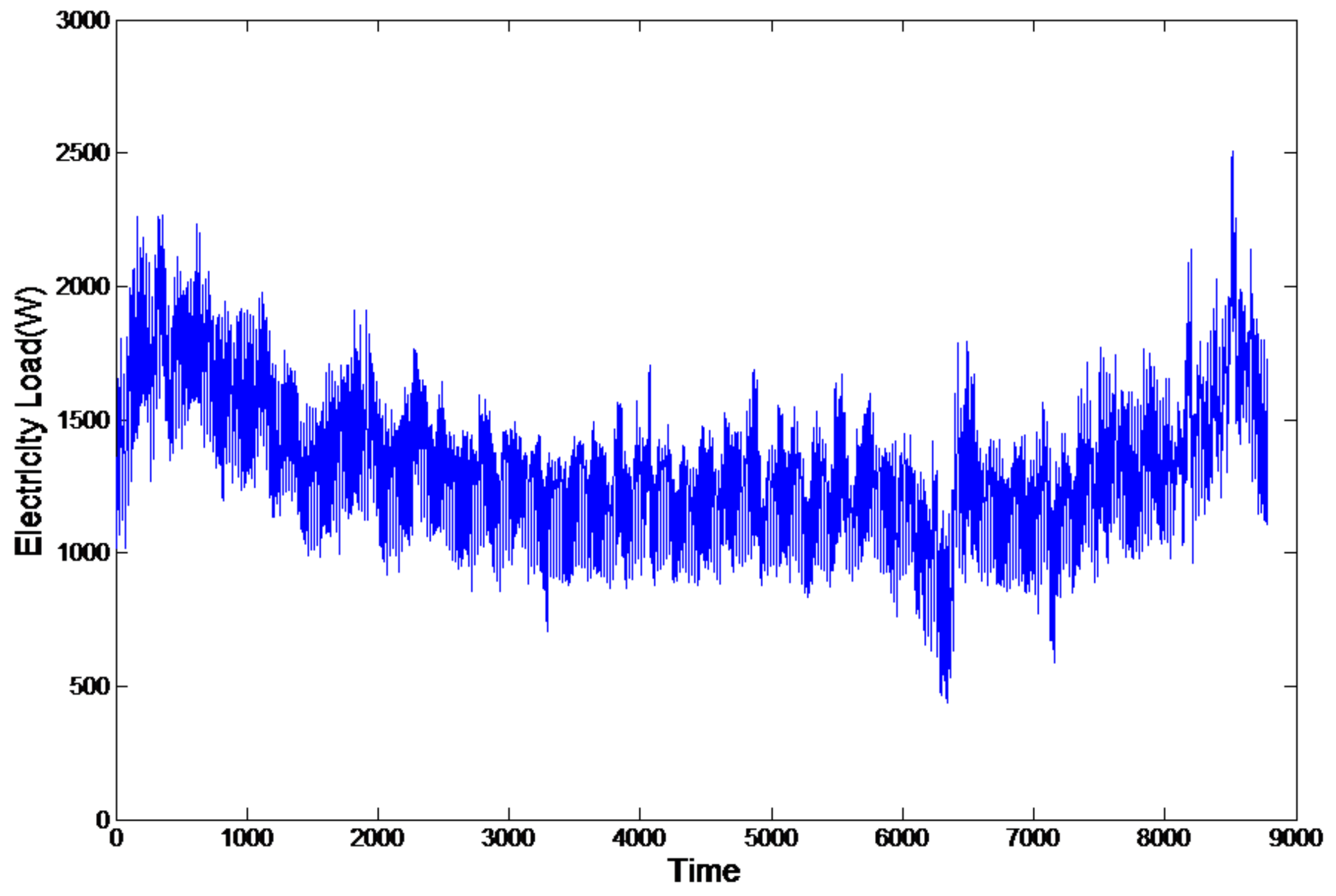
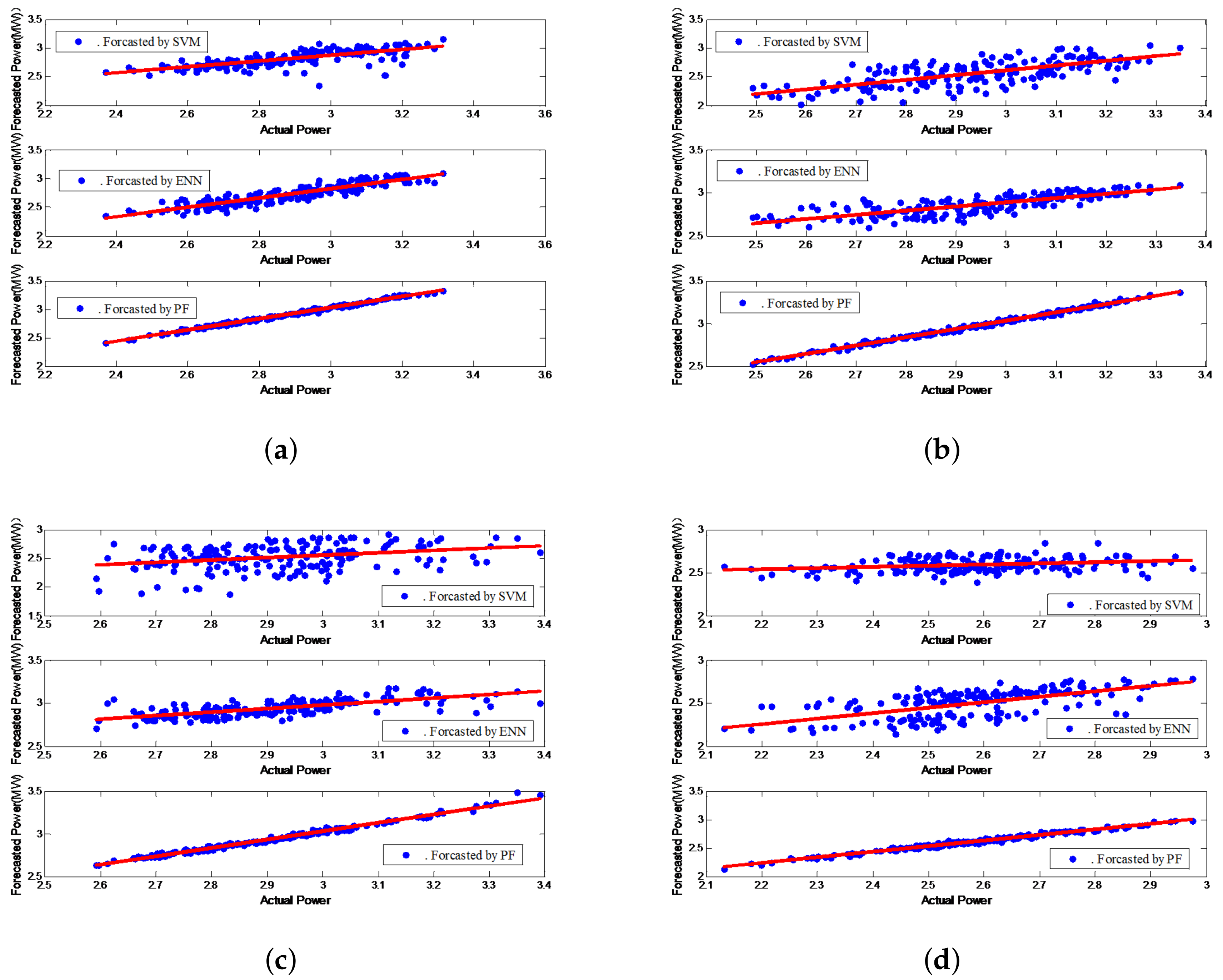
4.1. Electricity Load Prediction
4.2. Impact of Prediction Errors on Microgrid Day-Ahead Scheduling
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Rinaldi, S.; Pasetti, M.; Flammini, A.; Ferrari, P.; Sisinni, E.; Simoncini, F. A testing framework for the mon-itoring and performance analysis of distributed energy systems. IEEE Trans. Instrum. Meas. 2015, 68, 3831–3840. [Google Scholar] [CrossRef]
- Farzan, F.; Jafari, M.A.; Masiello, R. Toward optimal day-ahead scheduling and operation control of microgrids under uncertainty. IEEE Trans. Smart Grid 2015, 6, 499–509. [Google Scholar] [CrossRef]
- Ghose, T.; Pandey, H.W.; Gadham, K.R. Risk assessment of microgrid aggregators considering demand response and uncertain renewable energy sources. J. Mod. Power Syst. Clean Energy 2019, 7, 1619–1631. [Google Scholar] [CrossRef] [Green Version]
- Yildiz, B.; Bilbao, J.I.; Sproul, A.B. A review and analysis of regression and machine learning models on commercial building electricity load forecasting. Renew. Sustain. Energy Rev. 2017, 93, 1104–1122. [Google Scholar] [CrossRef]
- Rana, M.; Koprinska, I. Forecasting electricity load with advanced wavelet neural networks. Neurocomputing 2016, 182, 118–132. [Google Scholar] [CrossRef]
- Dash, S.K.; Dash, P.K. Short-term mixed electricity demand and price forecasting using adaptive autoregressive moving average and functional link neural network. J. Mod. Power Syst. Clean Energy 2019, 7, 1241–1255. [Google Scholar] [CrossRef] [Green Version]
- Siddarameshwara, N.; Yelamali, A.; Byahatti, K. Electricity short term load forecasting using elman recurrent neural network. In Proceedings of the 2010 International Conference on Advances in Recent Technologies in Communication and Computing, Kottayam, India, 16–17 October 2010. [Google Scholar]
- Xie, K.; Yi, H.; Hu, G.; Fan, Z. Short-term power load forecasting based on elman neural network with particle swarm optimization. Neurocomputing 2019, 26, 22–59. [Google Scholar] [CrossRef]
- Kelo, S.; Dudul, S. A wavelet elman neural network for short-term electrical load prediction uder the influence of temperature. Int. J. Electr. Power Energy Syst. 2012, 43, 1063–1071. [Google Scholar] [CrossRef]
- Alam, S. Recurrent Neural Networks in Electricity Load Forecasting; Royal Institute of Technolgy: Stockholm, Sweden, 2018. [Google Scholar]
- Zheng, J.; Xu, C.; Zhang, Z.; Li, X. Electric load forecasting in smart grids using long-short-term-memory based recurrent neural network. In Proceedings of the 2017 51st Annual Conference on Information Sciences and Systems (CISS), Baltimore, MD, USA, 22–24 March 2017. [Google Scholar]
- Ugurlu, U.; Oksuz, I.; Tas, O. Electricity price forecasting using recurrent neural networks. Electr. Power Energy Syst. 2018, 11, 1255. [Google Scholar] [CrossRef] [Green Version]
- Ni, K.L.; Wang, J.Z.; Tang, G.Y.; Wei, D.X. Research and application of novel hybrid model based on a deep neural network for electricity load forecasting: A case study in Australia. Energies 2019, 12, 2467. [Google Scholar] [CrossRef] [Green Version]
- Ertugrul, O. Forecasting electricity load by a novel recurrent extreme learning machines approach. Electr. Power Energy Syst. 2016, 78, 429–435. [Google Scholar] [CrossRef]
- Fu, Y.; Li, Z.; Zhang, H.; Xu, P. Using support vector machine to predict next day electricity load of public buildings with sub-metering devices. Procedia Eng. 2015, 121, 1016–1022. [Google Scholar] [CrossRef] [Green Version]
- Ayub, N.; Javaid, N.; Mujeeb, S.; Zahid, M.; Khan, W.Z.; Khattak, M.U. Electricity load forecasting in smart grids using support vector machine. In International Conference on Advanced Information Networking and Applications; Springer: Cham, Switzerland, 2019. [Google Scholar]
- Ma, Z.; Zhong, H.; Xie, L.; Xia, Q.; Kang, C. Month ahead average daily electricity price profile forecasting based on a hybrid nonlinear regression and SVM model: An ERCOT case study. J. Mod. Power Syst. Clean Energy 2018, 6, 281–291. [Google Scholar] [CrossRef]
- Ahmad, W.; Ayub, N.; Ali, T.; Irfan, M.; Awais, M.; Shiraz, M.; Glowacz, A. Towards short term electricity load forecasting using improved support vector machine and extreme learning machine. Energies 2020, 13, 2907. [Google Scholar] [CrossRef]
- Chen, Y.; Xu, P.; Chu, Y.; Li, W.; Wu, Y.; Ni, L.; Bao, Y.; Wang, K. Short-term electrical load forecasting using the support vector regression(svr) model to calculate the demand response baseline for office buildings. Appl. Energy 2017, 195, 659–670. [Google Scholar] [CrossRef]
- Yaslan, Y.; Bican, B. Empirical mode decomposition based denoising method with support vector regression for time series prediction: A case for electricity load forecasting. Measurement 2017, 103, 52–61. [Google Scholar] [CrossRef]
- Badran, R.M.O.; Abdulhadi, E. A fuzzy inference model for short-term load forecasting. Energy Policy 2009, 37, 1239–1248. [Google Scholar]
- Mukhopadhyay, P.; Mitra, G.; Banerjee, S.; Mukherjee, G. Electricity load forecasting using fuzzy logic: Short term load forecasting factoring weather parameter. In Proceedings of the 2017 7th International Conference on Power Systems (ICPS), Pune, India, 21–23 December 2017. [Google Scholar]
- Zhang, J.; Wei, Y.; Li, D.; Tan, Z.; Zhou, J. Short term electricity load forecasting using a hybrid model. Energy 2018, 158, 774–781. [Google Scholar] [CrossRef]
- Wang, D.; Yang, F.; Tsui, K.-L.; Zhou, Q.; Bae, S.J. Remaining useful life prediction of lithium-ion batteries based on spherical cubature particle filter. IEEE Trans. Instrum. Meas. 2016, 65, 1282–1291. [Google Scholar] [CrossRef]
- Yang, C.; Lou, Q.; Liu, J.; Yang, A.Y. Particle filtering-based methods for time to failure estimation with a real-world prognostic application. Appl. Intell. 2018, 48, 2516–2526. [Google Scholar] [CrossRef]
- Li, K.; Wu, J.; Zhang, Q.; Su, L.; Chen, P. New particle filter based on ga for equipment remaining useful life prediction. Sensors 2017, 17, 696. [Google Scholar] [CrossRef] [Green Version]
- Li, L.; Saldivar, A.A.F.; Bai, Y.; Li, Y. Battery remaining useful life prediction with inheritance particle filtering. Energies 2019, 12, 2784. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.; Vaddi, S.S.; Menon, P.K.; Ohlmeyer, E.J. Comparison between nonlinear filtering techniques for spiraling ballistic missile state estimation. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 313–328. [Google Scholar]
- Nan, X.; Qiu, T.; Li, J.; Li, S. A nonlinear filtering algorithm combining the kalman filter and the particle filter. Acta Electron. Sin. 2013, 41, 148–152. [Google Scholar]
- Rigatos, G.G. Particle filtering for state estimation in nonlinear industrial systems. IEEE Trans. Instrum. Meas. 2019, 58, 3885–3900. [Google Scholar] [CrossRef]
- Liu, S.C.; Liu, P.X.; Wang, X.Y.; Wang, Z.J.; Meng, W.C. Effect of correlated photovoltaic power and load uncertainties on grid-connected microgrid day-ahead scheduling. IET Gener. Transm. Distrib. 2017, 11, 3620–3627. [Google Scholar] [CrossRef]
- Dobos, A.P. Pvwatts Version 5 Manual; NREL: Golden, CO, USA, 2015. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notations | Denotation |
|---|---|
| () | Active (reactive) power output of the ith controllable DG at tth time interval |
| Generation price of the ith controllable DG at tth time interval | |
| Active (reactive) power demand of the i-th load at t-th time interval | |
| Active (reactive ) power of the i-th uncontrollable DG at t-th time interval | |
| Active power injected from the grid at t-th time interval | |
| Electricity price at tth time interval | |
| Voltage angular difference between bus i and bus j at tth time interval | |
| , | Elements of the admittance matrix at t-th time interval |
| Instantaneous power in the branch connecting bus i and bus j at t-th time interval | |
| Voltage at the i-th bus at t-th time interval | |
| , | Lower and upper limits of the voltage angular difference |
| , | Minimum and maximum instantaneous power in the branch connecting bus i and bus j |
| , | Minimum and maximum active power of controllable DG i |
| , | Minimum and maximum reactive power of controllable DG i |
| , | Minimum and maximum active power of uncontrollable DG i |
| , | Minimum and maximum reactive power of uncontrollable DG i |
| , | Minimum and maximum active power injected to or absorbed from the grid |
| , | Minimum and maximum voltage at bus i |
| Algorithms | Criterion | 10 h | 15 h | 21 h | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Spring | Summer | Fall | Winter | Spring | Summer | Fall | Winter | Spring | Summer | Fall | Winter | ||
| ENN | MAPE(%) | 6.61 | 5.65 | 7.67 | 7.48 | 5.49 | 7.61 | 7.85 | 7.78 | 4.47 | 9.33 | 7.21 | 8.91 |
| MAE | 103.50 | 75.83 | 97.22 | 117.77 | 74.81 | 111.60 | 99.80 | 119.38 | 68.03 | 131.38 | 88.98 | 149.24 | |
| RMSE | 9.35 | 7.13 | 9.14 | 11.44 | 6.96 | 11.21 | 10.04 | 11.12 | 6.38 | 12.14 | 9.01 | 13.91 | |
| SVM | MAPE(%) | 7.04 | 8.98 | 11.82 | 10.26 | 8.28 | 10.49 | 13.24 | 10.21 | 7.09 | 9.99 | 9.05 | 9.81 |
| MAE | 108.66 | 121.10 | 149.66 | 171.47 | 113.87 | 146.01 | 167.90 | 161.33 | 104.48 | 138.41 | 131.38 | 158.23 | |
| RMSE | 10.51 | 10.92 | 13.46 | 16.04 | 11.59 | 13.04 | 14.93 | 14.77 | 10.06 | 12.11 | 10.59 | 14.26 | |
| PF | MAPE(%) | 1.38 | 1.01 | 1.11 | 1.46 | 2.91 | 3.00 | 2.98 | 2.59 | 1.85 | 0.70 | 1.79 | 1.58 |
| MAE | 21.02 | 13.72 | 13.99 | 23.01 | 40.32 | 41.55 | 38.00 | 39.52 | 29.01 | 9.54 | 21.84 | 26.53 | |
| RMSE | 1.94 | 1.27 | 1.40 | 2.11 | 3.34 | 3.35 | 3.17 | 3.31 | 2.69 | 0.95 | 2.39 | 2.33 | |
| Algorithms | Criterion | 10 h | 15 h | 21 h | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Spring | Summer | Fall | Winter | Spring | Summer | Fall | Winter | Spring | Summer | Fall | Winter | ||
| ENN | MAPE(%) | 2.76 | 3.35 | 2.93 | 4.18 | 5.38 | 4.15 | 3.04 | 4.94 | 2.80 | 3.27 | 3.25 | 5.14 |
| MAE | 76.02 | 100.70 | 85.34 | 104.30 | 157.30 | 122.50 | 87.84 | 127.50 | 66.49 | 82.38 | 85.30 | 115.70 | |
| RMSE | 6.93 | 8.64 | 8.02 | 10.13 | 13.09 | 10.43 | 8.84 | 11.81 | 6.24 | 8.02 | 8.32 | 10.66 | |
| SVM | MAPE(%) | 3.48 | 7.97 | 5.53 | 6.23 | 3.76 | 5.74 | 8.48 | 5.06 | 3.83 | 3.69 | 3.40 | 6.17 |
| MAE | 94.47 | 244.00 | 163.10 | 150.90 | 111.00 | 167.90 | 244.90 | 129.50 | 94.67 | 95.30 | 90.70 | 137.20 | |
| RMSE | 9.12 | 19.94 | 14.69 | 14.01 | 11.50 | 15.25 | 20.96 | 11.67 | 8.92 | 8.78 | 8.63 | 12.50 | |
| PF | MAPE(%) | 0.69 | 0.41 | 0.42 | 0.81 | 1.25 | 1.26 | 1.16 | 1.36 | 1.07 | 0.33 | 0.71 | 1.03 |
| MAE | 18.75 | 12.16 | 12.30 | 20.27 | 35.50 | 36.57 | 33.53 | 34.86 | 25.74 | 8.52 | 19.29 | 23.50 | |
| RMSE | 1.71 | 1.13 | 1.23 | 1.86 | 2.94 | 2.95 | 2.80 | 2.92 | 2.39 | 8.51 | 2.11 | 2.06 | |
| Algorithms | Criterion | 10 h | 15 h | 21 h | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Spring | Summer | Fall | Winter | Spring | Summer | Fall | Winter | Spring | Summer | Fall | Winter | ||
| Particles Leanness | MAPE(%) | 8.72 | 10.21 | 8.87 | 7.20 | 3.66 | 7.62 | 6.52 | 3.37 | 2.44 | 1.42 | 3.74 | 2.77 |
| MAE | 132.26 | 139.33 | 115.74 | 116.25 | 50.53 | 108.55 | 87.37 | 51.46 | 37.97 | 19.47 | 46.57 | 46.38 | |
| RMSE | 10.83 | 11.25 | 9.84 | 9.62 | 4.80 | 9.56 | 8.26 | 5.06 | 3.64 | 2.02 | 4.36 | 4.30 | |
| SD | 139.02 | 114.47 | 126.78 | 209.42 | 126.81 | 129.23 | 138.92 | 202.12 | 147.18 | 129.95 | 132.22 | 212.03 | |
| Strong noise | MAPE(%) | 5.19 | 6.16 | 6.02 | 4.80 | 6.91 | 8.53 | 8.39 | 6.33 | 2.53 | 1.44 | 2.31 | 3.32 |
| MAE | 78.48 | 83.35 | 76.26 | 76.63 | 95.57 | 117.48 | 106.58 | 95.40 | 39.75 | 19.88 | 29.05 | 57.34 | |
| RMSE | 7.13 | 7.76 | 7.44 | 7.09 | 8.57 | 10.61 | 9.83 | 8.12 | 3.97 | 1.96 | 2.99 | 5.45 | |
| SD | 145.11 | 135.94 | 159.53 | 232.25 | 131.01 | 176.98 | 181.06 | 200.63 | 148.19 | 116.10 | 139.73 | 211.38 | |
| Optimal | MAPE(%) | 1.38 | 1.01 | 1.11 | 1.46 | 2.91 | 3.00 | 2.98 | 2.59 | 1.85 | 0.70 | 1.79 | 1.58 |
| MAE | 21.02 | 13.72 | 13.99 | 23.01 | 40.32 | 41.55 | 38.00 | 39.52 | 29.01 | 9.54 | 21.84 | 26.53 | |
| RMSE | 1.94 | 1.27 | 1.40 | 2.11 | 3.34 | 3.35 | 3.17 | 3.31 | 2.69 | 0.95 | 2.39 | 2.33 | |
| SD | 136.79 | 117.04 | 131.79 | 227.50 | 113.49 | 159.97 | 162.55 | 178.70 | 156.17 | 118.88 | 121.77 | 217.60 | |
| Time | Particle Number | Computing Time/s | MAPE/% |
|---|---|---|---|
| 10:00 | 100 | 10.472 | 4.419 |
| 500 | 18.558 | 4.161 | |
| 1000 | 44.233 | 4.039 | |
| 2000 | 169.575 | 3.996 | |
| 2500 | 256.480 | 2.953 | |
| 3000 | 376.188 | 2.952 | |
| 15:00 | 100 | 9.984 | 4.449 |
| 500 | 19.041 | 4.099 | |
| 1000 | 49.819 | 4.023 | |
| 2000 | 169.311 | 2.938 | |
| 2500 | 266.816 | 2.610 | |
| 3000 | 391.618 | 2.536 | |
| 21:00 | 100 | 10.308 | 4.761 |
| 500 | 18.709 | 4.665 | |
| 1000 | 44.057 | 4.073 | |
| 2000 | 146.095 | 3.853 | |
| 2500 | 218.248 | 2.642 | |
| 3000 | 318.991 | 2.586 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, Q.; Yan, Y.; Liu, S.; Yang, C.; Chaoui, H.; Alzayed, M. Particle Filter-Based Electricity Load Prediction for Grid-Connected Microgrid Day-Ahead Scheduling. Energies 2020, 13, 6489. https://doi.org/10.3390/en13246489
Cheng Q, Yan Y, Liu S, Yang C, Chaoui H, Alzayed M. Particle Filter-Based Electricity Load Prediction for Grid-Connected Microgrid Day-Ahead Scheduling. Energies. 2020; 13(24):6489. https://doi.org/10.3390/en13246489
Chicago/Turabian StyleCheng, Qiangqiang, Yiqi Yan, Shichao Liu, Chunsheng Yang, Hicham Chaoui, and Mohamad Alzayed. 2020. "Particle Filter-Based Electricity Load Prediction for Grid-Connected Microgrid Day-Ahead Scheduling" Energies 13, no. 24: 6489. https://doi.org/10.3390/en13246489
APA StyleCheng, Q., Yan, Y., Liu, S., Yang, C., Chaoui, H., & Alzayed, M. (2020). Particle Filter-Based Electricity Load Prediction for Grid-Connected Microgrid Day-Ahead Scheduling. Energies, 13(24), 6489. https://doi.org/10.3390/en13246489