1. Introduction
A distribution network supplies electric power to customers and a fault in the distribution line directly affects customers as interruptions. The accuracy of the fault detection and location, the speed of the isolation and service restoration are very important to the operational reliability of power companies. Therefore, power utilities greatly emphasize techniques for minimizing the outage area of customers through fast detection and precise location of faults [
1]. Traditionally, the estimation of fault location was conducted by restricted information as fault indication signals and operators to isolate the faulted section and restore the outage areas.
However, utilities have faced two difficulties in recent years. The first difficulty is the consumer demand for high reliability and quality. The utility’s solution for improving fault detection accuracy and speed was infrastructure investment for the additional automated facilities. However, the increasing investments in electric utilities are no longer a good solution due to the decrease in electric power demand. The second difficulty is the interconnection of distributed energy resources (DERs), such as inverter-based renewable sources, i.e., photovoltaic (PV), has increased. It has increased more the operational complexity of distribution networks and also has difficulty in estimating the fault location by using the traditional way. Therefore, there is a need for a reliable fault location method that minimizes infrastructure investment and considers the effects of DERs.
The studies of fault location methods are divided into three groups. The first group utilizes the FI (fault indication) signals of RTUs (remote terminal units) [
2,
3,
4,
5,
6,
7]. These methods estimate the fault location through FI signals generated by over currents and under voltages at RTUs.
The first group consists of two cases according to the presence or absence of the current direction information. The first case of the first group proposes the estimation of fault location with no current direction in the FI signal [
2,
3]. Seo et al. determined the current direction by using the criteria for phasor differences, and estimated the fault location through the relationship between FI and the determined current direction [
2]. Lee et al. proposed a fault location method by using a fuzzy membership about the deviation of positive and zero-sequence current between the RTUs [
3]. The first cases are required reference values for phasor differences and fuzzy memberships. Then, the fault location estimation result is greatly influenced by each reference value. However, there is difficulty in assigning the reference values according to the change of the network situation. The second case of the first estimated a fault location by using the FI signal including the directional information of current [
4,
5,
6,
7]. These studies identified the fault location by using the relationship between the topology and FIs. Sun et al. proposed a method by considering the relationship between adjacent FIs, data loss of FI, and measurements of smart meters in customer sides [
6]. Dzafi et al. proposed a method of estimating fault location by using the FI index. They used the graph marking method to perform topology processing by the relationship of the FIs [
7]. The studies of the first group required the installation of RTUs at all network points that need to identify for fault location. Above all, there is a problem in that excessive infrastructure investment is required for enhancing the accuracy and speed of fault location. Additionally, it should consider the missing and delay of FI signal caused by actual field conditions and communication traffic.
The second group calculated a fault distance and location by using measurement values and network analysis by the line and load models [
8,
9,
10]. Liao proposed a method of calculating the fault distance by using voltage at a substation and the relationship between the equivalent impedance of a line and the fault resistance [
8]. Bahmanyar et al. and Dashti et al. proposed the estimation of fault location through the relation between the fault current and calculated voltage in each section [
9,
10]. In [
8,
10], they did not consider the interconnection of DERs. Therefore, in the case of many DERs interconnection, the contribution of the DERs may cause errors in the fault location. Moreover, the redundancy problem for fault location with the same lengths can arise due to many lateral lines of the distribution network.
The third group used high-precision measurement units. The phasor measurement unit (PMU) is one of the high precision measurement units with characteristics such as phasor measurements and synchronization of measurements [
11,
12]. Usman et al. assumed every bus of a distribution network as a fault point and estimated a voltage through state estimation based on weighted least squares by using current values at PMUs. It was also assumed that the PMUs were installed at almost all buses of the feeder and every DER. The fault location was identified through the comparison between the estimated value and measured value [
11]. Farajollahi et al. proposed a method identifying a faulted section through the comparison of voltage and current variations using the measurements of PMUs at both ends of straight paths for a feeder [
12]. The studies of the third group have the advantage that they do not require extensive replacement of the distribution system infrastructure or excessive investment. However, those methods require many PMUs to be installed at every DER, at both ends, and in the middle of the feeder. It leads to an increase in the communication burden and cost due to the installation of the PMU. This is another infrastructure investment and can be a challenge to the network operation of power companies. Additionally, the method of [
12] does not consider unbalanced faults and impact of DERs. Therefore, it is necessary for the development of PMU-based fault location estimation that can minimize the PMU and solve the problems of DER.
This study proposed a method of estimating the fault location by combining the PMU measurements and contingency analysis results using short circuit calculation. To that end, this paper proposes the following three points. First, we propose a 2-stage fault location estimation method that identifies the fault location in the main feeder using two PMUs installed in the main feeder, and then compares the contingency short circuit analysis result and the PMU measurements to estimate the fault location inside the lateral feeder. Second, we modified the existing method, which only uses the positive sequence components of voltage and current without considering the contribution of DER, by proposing a method of calculating the voltage variation by decomposing voltage and current into symmetrical components. Furthermore, we propose a method of combining the voltage phasor angle measurement of the PMU and the RTU measurement to reflect the fault current contribution of DERs to the main feeder. Third, to estimate the fault location in the lateral feeder, we propose a short circuit analysis method that reflects the dynamic control characteristics of the PV inverter during a fault for the implicit Z-bus method, which is a conventional 3-phase power flow method. This paper is organized as follows: Chapter 2 outlines the conventional PMU-based fault location methods and analyzes their limitations. Chapter 3 presents the overall strategy of the proposed 2-stage fault location and explains the details of the algorithm. Chapter 4 verifies the proposed algorithm through the conduction of case studies for the test system using Matlab Simulink. In order to verify the applicability of the proposed algorithm to the actual system, a random noise test was performed.
2. Conventional Fault Location Methods Using PMUs
The study [
11] assumed that every bus is a faulted point and calculated the current between buses by using the measurement values that were obtained by PMUs installed at the substation and DERs. After that, the voltage of the PMU installation point was calculated through weighted least squares-based state estimation by using line impedance and calculated current. The fault location was identified through the comparison between the estimated and measured values of the voltage at the PMUs. As shown in
Figure 1, if bus 4 is assumed as the fault point, the upstream current of the fault point is calculated by using the
and
. If bus 6 is assumed as the fault point also, it is calculated with additional consideration for
. The voltage is estimated for each case by using the calculated current and line impedance. If the case of the assumed fault at bus 4 has the smallest deviation (comparing with the estimated and measured voltages for each bus), it can identify the bus as the fault location. However, this method requires the installation of many PMUs at every DER point, at both ends and of the feeder, and in the middle of the feeder.
The study [
12] used the voltage and current variations before and after the fault detected at the PMUs. For estimation of the fault location, the positive sequences of voltage and current variations were calculated for the forward (from start to end of a feeder) and backward (from end to start of the feeder) direction, as expressed by Equation (1) and (2).
where,
and
are the positive voltage and current variations of each bus
. For calculation of the variations in each direction, the measured values of the PMU are used as the initial value.
is the line impedance between the bus
and
.
is the admittance of the load connected to the bus
. Finally, the fault location was determined as a section where the voltage difference between the two directions was minimized as shown in
Figure 2.
This method calculated variation values using only the positive sequence. Therefore, it was required to consider the symmetrical components for the unbalanced faults. Additionally, the lateral feeders were treated as simply impedance model. It is can be erroneously calculated due to the contribution of the DERs connected to the lateral feeders.
Above all, that requires two PMUs at both ends of the straight paths for a feeder to identify a fault in the main and every lateral feeder. Even for the reduction distribution network shown in
Figure 2, as many as four PMUs are required. This will require the installation of much more PMUs for the actual distribution networks. According to other studies, the PMU can generate approximately 13 GB of data every month [
13,
14]. Moreover, the generation of monthly communication costs will be at least
$13.84 for each PMU, which aggravates the economic burden.
Table 1 presents the amount of data required by each PMU installed in the distribution networks.
Table 2 shows the corresponding cost of communication [
13]. In
Table 2, the use of wireless communication was assumed. Additionally, separate communication infrastructure and costs are required to use an optical network. Therefore, as the increase of PV connected to distribution network, installing many PMUs is not a practical solution to the fault location.
4. Case Studies
To verify the proposed method, case studies were performed through various fault simulations by using Matlab Simulink.
Figure 8 presents the single line diagram of the test system. As previously mentioned, we assumed that two PMUs are installed at both ends of the main feeder and RTUs are installed at the start of the lateral feeders with large-capacity DERs. A feeder #5 of KADTS (Korea active distribution test system) was used for case studies. The model was developed for technical testing of active distribution networks using standard model data from KEPCO (Korea Electric Power Corporation) [
23]. The feeder was applied for a medium-long length line. The length of each section was 0.8 km, and the total distance of the line was 20 km. The positive and negative sequence components (
and a zero sequence component (
per km are applied by utilizing the impedance of ACSR
cables. In
Figure 8b, the ’Lat’ is the virtual bus at the connection point of the lateral feeder and it was used to estimate the fault location on the main feeder. The ‘Lat’ bus was assumed to exist on both sides of the 20 m from the lateral feeder connected bus. The test system based voltage was 22.9 kV lines. Each section load applied was also 250 kW.
Table 3 presents the PV capacities in the test system. The PV1, 3, and 6 assumed that the measurement unit was installed.
Figure 9 shows the PV system that is modeled on Simulink. The PV system was implemented through the consideration of the characteristics for the PV inverter. The PV system includes modules that enabled a user to limit the PV current inside an inverter. The control method of the inverter adopted the BPSC.
Figure 9 shows the current and voltage of a PV system implemented under a single line-to-ground fault. It can be seen that in the case of a fault, the current is controlled in balanced, and the voltage changes by the fault type.
4.1. Fault Location Estimation in the Main feeder
4.1.1. Comparative Analysis of the Conventional Method
To verify the algorithm of Stage 1, a single line-to-ground fault was simulated for Buses 7 and 8 among the buses in the main feeder.
Table 4 presents the voltage variations and calculation results for each bus obtained in Stage 1. A “FWD” and “BWD” denote the voltage variations that were calculated at the start and end PMUs in the forward and backward directions. “DEV” means the deviation of calculations between the FWD and BWD. The results in
Table 4 show that the proposed method was approximately the same as the Matlab simulation results and the estimated fault location was accurate. The W/O (without) PV was calculated without considering the impact of the PV in the lateral feeder. The W/O PV results had an erroneous fault location because the calculation error occurred after the lateral feeder due to the impact of PV. In the existing method [
12], it could be seen that a large error occurred because the symmetrical component and impact of the PV was not considered. As a result, the fault location was estimated to be between Buses 9 and 10 that were completely different from the actual fault location. The bottom part of
Table 4 shows the comparison with the calculation and simulation results for the current impact of the lateral feeders.
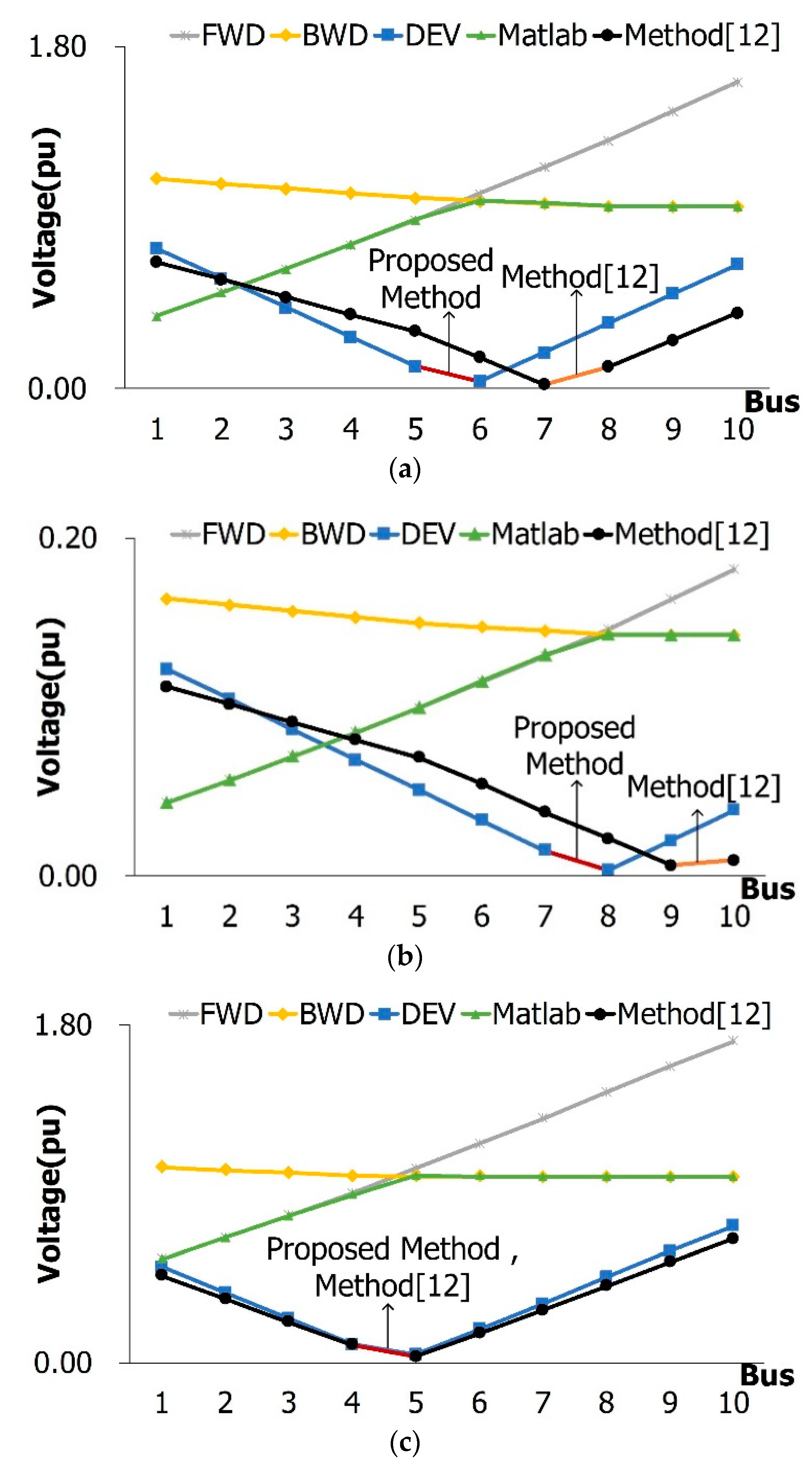
Figure 10 shows the results of the proposed algorithm under the fault of the main feeder. The actual fault location is marked in the red line, while the method [
12] result is marked in the orange line. As shown in
Figure 10, the proposed method calculated approximately the same results in the Matlab simulation. Consequently, the proposed method accurately identified the actual fault location. The existing study [
12] did not consider the impact of the PVs and symmetrical components in the unbalanced faults, except the short circuit faults such as
Figure 10c,d. Therefore, In
Figure 10a,b, we could confirm that there was an error in estimating the fault location.
4.1.2. Stage 1 Estimation Results for the Error Test
To verify the robustness of the proposed method, we performed simulations for the error of network models and measurements. In the case of the network model, the proposed method could be affected by the error of the line parameters and the load estimation value. However, line parameter error (line length, phase information, etc.) was excluded from this paper because it was considered an improvement point of the utility’s operation and maintenance. To verify the effect of the load, the single line-to-ground fault with 30 Ω was simulated, and 1000 simulations were conducted for each fault location. Cases 1–3 include the error of 5%, 10%, and 15%, respectively.
Table 5 shows the simulation results for the main feeder according to the load errors. It estimated a fault location to 100% in all cases. Various load estimation methods were proposed, as the Ref [
1]. Therefore, it was considered that the occurrence of a slight error by load estimation methods would not be a big problem in the application of the proposed method.
Moreover, the robustness of the proposed method was verified for the measurement errors that could occur in the actual operation. The measurement error test was performed by applying noises to the voltage and current magnitudes of the RTU and PMU and the phasor angle measurements of the PMU. In
Table 6, random errors were applied to the PMU and RTU measurement values (voltage and current magnitude) by protection class 3 specified by IEEE C57.13 and IEC 61869 [
24,
25]. The phasor angle errors of a voltage and current were also applied to the PMU by C37.118 [
13]. For random error tests, we use a standard normal distribution. The range of standard deviation 3σ was applied to the error tests. The single line-to-ground fault was simulated, and 1000 simulations were conducted for each fault location. Cases 1–4 include the fault resistances of 0, 10, 20, and 30 Ω, respectively. The simulated fault locations were as follows: between Buses 2–3, 4–5, 6–7, and 7–8.
Although there were slight errors when the fault resistance was above 30 Ω, the accuracy of fault location was 100% for almost cases. Therefore, we confirmed that it is robust to the measurement error of Stage 1.
To verify the effect of the phasor angle error of a voltage and current measurement for PMUs during the main feeder fault, the case studies were performed based on Case 1 (0 Ω), which had the most volatile voltage and current variation among the above cases. Cases 1–4 added the phasor angle error of 0.57°, 1°, 2°, and 3° respectively.
Table 7 shows the test results for the main feeder based on phasor angle errors. As a result, slight errors were recorded when the phasor angle error was above 3°, but the accuracy of fault location was almost 100% for all cases. Therefore, it was confirmed that the phasor angle error did not have a significant effect for fault location estimation of the main feeder.
4.2. Fault Location Estimation in the Lateral Feeder
4.2.1. Analysis of the Short Circuit Analysis Results
Table 8 presents the comparison results between the Matlab simulation results (“M”) and proposed short circuit analysis results (“C”). The single line-to-ground fault was simulated at every bus in the test system. The voltage and current values after the fault at the PMU points were comparatively analyzed. At the start and end of the feeder, the voltage and current were calculated at an error rate of approximately below 0.01%. Consequently, the proposed short circuit analysis method in this paper could calculate the variations of each bus before and after a fault, which were sufficiently applicable to the fault location in the lateral feeder.
4.2.2. Estimation Result of Stage 2
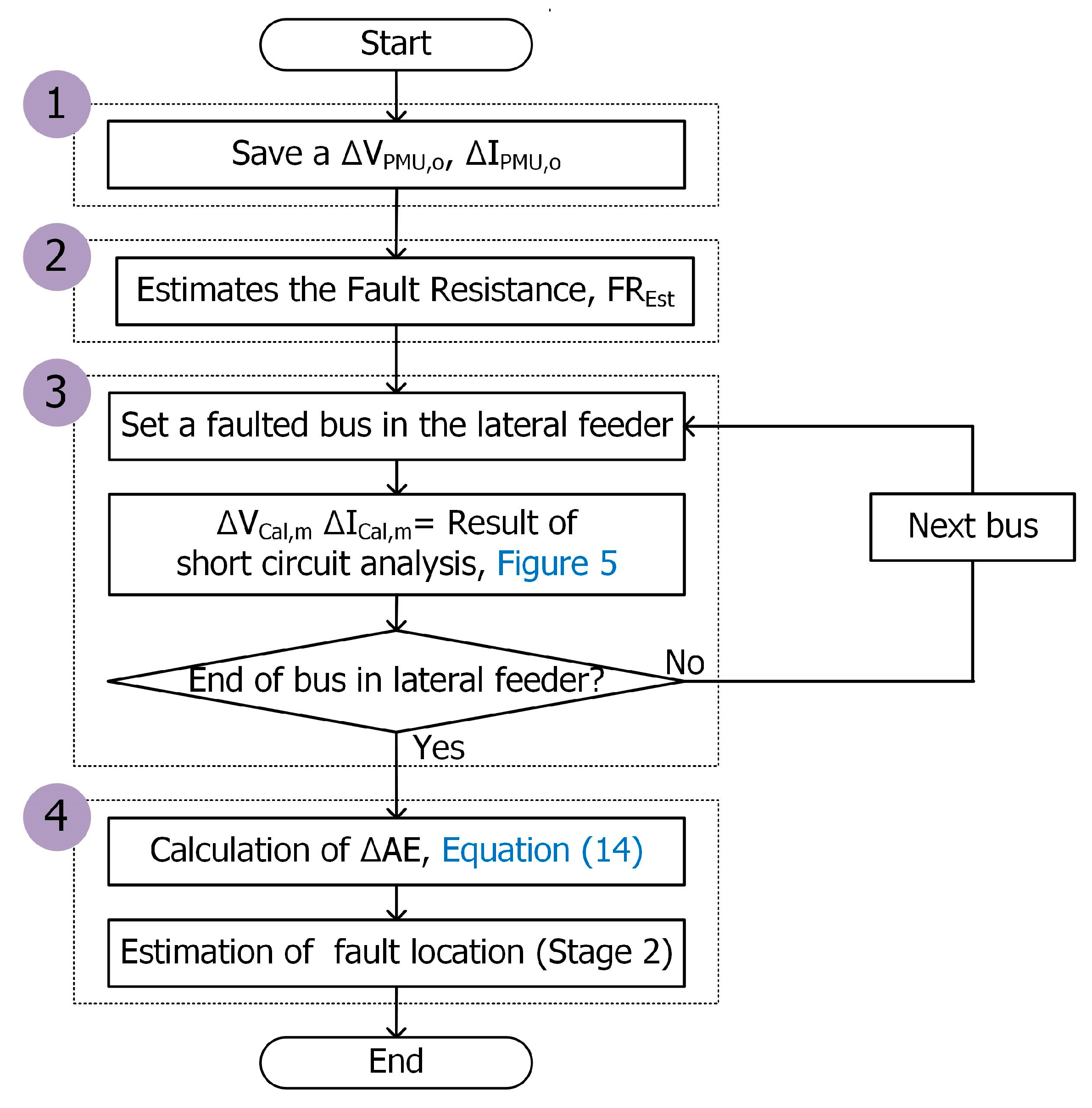
To verify the proposed algorithm of Stage 2, the faults were simulated for the lateral feeder.
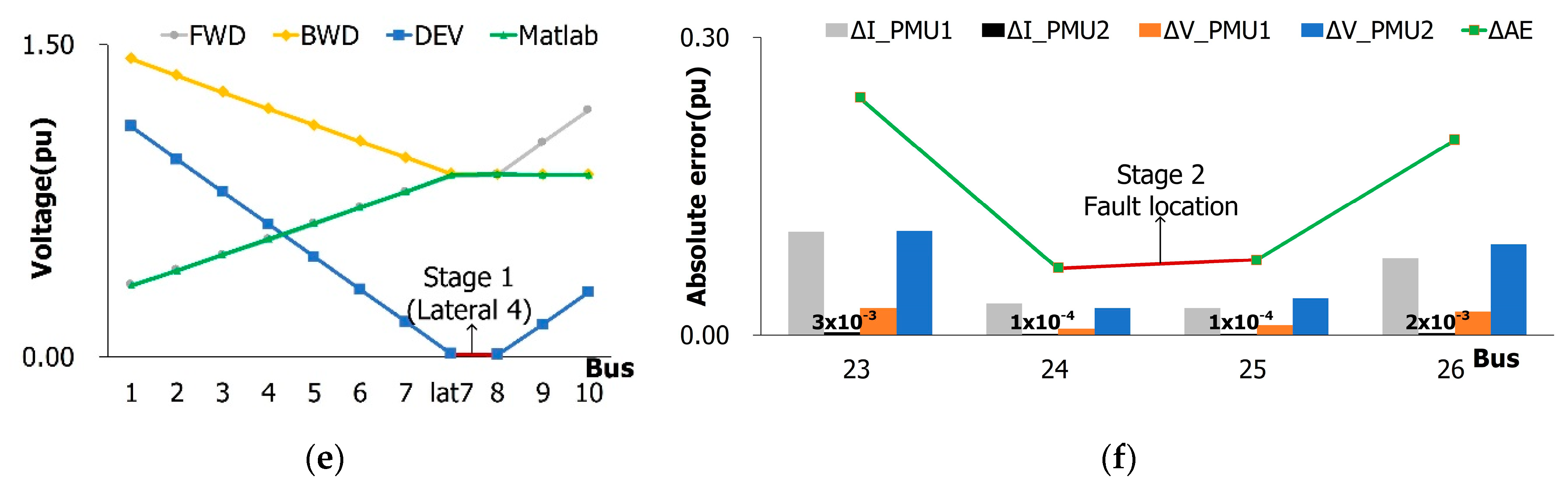
Figure 11 shows the results of fault location.
Figure 11a,c,e shows the estimation results of Stage 1. In
Figure 11b,d,f,
denotes the sum of absolute errors by using Equation (14).
and
,
,
are absolute errors between the calculated and measured values. ∆I_PMU2 is close to zero because it only affected by the load at the downstream of the PMU installation point. The fault simulation results demonstrated that Stage 1 estimated accurate fault locations for buses connected to the lateral feeder in every case. For calculation of the absolute errors in (14), if the estimated faulted resistance is less than 5 Ω, only the magnitude comparison is used. And in cases of more than 5 Ω, the entire Equation (14) is used. The criteria of fault resistance can be determined by short circuit analysis before applying the proposed algorithm to the target networks. In the case of
Figure 11b,f, the magnitude comparison is only used because the estimated fault resistance is 0.065 Ω, 0.11 Ω, respectively. Through these results, it can be confirmed that the faulted section is accurately estimated because the magnitude deviation between buses is large when the fault resistance is small. In the case of
Figure 11d, it can be seen that the magnitude and the phasor angle are compared because the estimated fault resistance is 29.875 Ω. The faulted section is accurately estimated according to the phasor angle deviation between buses. Therefore, it is necessary to consider not only the magnitude but also the phasor angle when a large fault resistance is inserted. As a result, Stage 2 confirms the accurate identification of the faulted sections in the lateral feeder.
4.2.3. Stage 2 Estimation Results for the Error Test
To verify the effect of Stage 2 for the load error, the same error test as the main feeder was conducted.
Table 9 shows the results of the fault location for the lateral feeder according to the load errors. The proposed method estimates a fault location to 100% in all cases for the lateral feeder. As a result, the error of the load did not significantly affect the proposed method.
Moreover, to verify the robustness of the algorithm against random measurement errors caused by a fault in a lateral feeder. The measurement error test was also performed by applying noises to the voltage and current magnitudes of the RTU and PMU and the phasor angle measurements of the PMU for the main and lateral feeder. The single line-to-ground fault was simulated between buses 11–12, 17–18, 20–21, and 23–24.
Table 10 presents the noise test results. In Stage 1, the accuracy of the fault location was near 100% because the fault within a lateral feeder shows the same phenomenon as that of the fault in the connection point of the lateral feeder. In the test results of Stage 2, the accuracy of fault location was approximately 100% when the fault point resistance was below 20 Ω. The minimum accuracy of fault location was 97.6% when a fault includes the fault point resistance of 30 Ω. Case 4 has an insignificant current and voltage of magnitude and phasor angle deviations between the buses under the fault condition. Accordingly, the measurement noise as more influential in Case 4 than in other cases. However, the main feeder buses connected with the lateral feeder that occurred in the error of estimation were identified to be close to 100% by Stage 1. It will not be an important problem because the distance of the lateral feeder is short when the restoration of actual distribution networks.
Table 11 shows the result of the fault location when additional PMU was installed in the lateral feeder 3. As a result, the fault location result was estimated to be close to 100% for the lateral feeder 3. Therefore, the number of PMUs was reduced compared to the existing method, and a similar effect could be obtained when additional PMUs were installed only in the lateral feeder having a low fault location estimation rate.
To verify the effect of the phasor angle error for the lateral feeder, the same phasor angle error test conducted.
Table 12 shows the phasor angle error test results for the lateral feeder. As shown in
Table 12, 2° or higher phasor angle errors began to influence the faulted section estimation result. However, this will not be a problem when applying the proposed algorithm because the maximum phasor angle error is 0.57° in Ref. [
13,
26], which is the specification of a commercial PMU product.
5. Conclusions
To improve the excessive installation of PMUs, which is a common problem of existing PMU-based fault location methods, this study proposed a 2-stage fault location estimation method that combined the PMU measurements and short circuit analysis. In Stage 1 of the fault location in the main feeder, the symmetrical components of the voltage and current variations were considered to deal with the unbalanced fault. It also considered the impact of the lateral feeder with large-capacity DER on the main feeder. In Stage 2 of the fault location in a lateral feeder, the faults at each point in the lateral feeder were analyzed by using a short circuit analysis based on the unbalanced power flow that considers the dynamic control characteristics of the PV inverter. Then, the short circuit analysis results were compared with the measurement values at the installation point of PMU. As mentioned above, the proposed method requires the simultaneous measurement of PMU installed points (both ends of the main feeder and additional points as needed). This is common to Stage 1 for fault location estimation in the main feeder and Stage 2 for comparing the short circuit analysis value and the measurement. Accordingly, we used the PMU because simultaneous measurements require the voltage, current, and phasor angle. We could use the PQ meter or other instruments if they satisfy this requirement.
The following conclusions on the proposed algorithm were derived.
(1) The results of stage 1—where the fault location was simulated under diverse fault situations in the main feeder—were very similar to the Matlab simulation results. As compared with the existing study [
12], the fault location was more accurate. Accordingly, the proposed method proved to be more effective as it considered unbalanced faults and the impact of DERs in the lateral feeder.
(2) In the results of Stage 2, it was confirmed that two buses with the smallest deviation between the short circuit analysis results considering the dynamic characteristics of the PV inverter and measured value of PMU were identified as the fault locations. Accordingly, unlike the existing PMU-based fault location methods, the proposed algorithm did not require the installation of additional PMUs and prevented an excessive number of PMUs from being installed in the distribution networks.
(3) To verify the robustness of the proposed method, we performed the simulations for the error of network models and measurements. In the case of the network model, we believed that the elements of the parameter errors that influence the proposed method are line parameters and load estimation data. The errors of the line parameters such as line length and phase are expected to influence every system analysis method and operation algorithm. However, this should be researched as a separate topic because the line parameter errors are considered an improvement point of the utility’s operation and maintenance. In recently, the grid modernization and the introduction of new operating system (advanced DMS) due to the increased complexity of the distribution network are promoting the correction of line parameter errors. When using the RTU as in this study, load values can be estimated more accurately by the RTU measurement and state estimation as shown in reference [
1]. Moreover, as shown in the results of case study by load estimation error in
Table 5 and
Table 9 in this study, the proposed method shows robust results even in load values with a 15% error. Therefore, we believed that the load estimation error will not be a problem in applicability of the proposed method.
The test of measurement errors was performed by applying noises to the voltage and current magnitudes of the RTU and PMU and the phasor angle measurements of the PMU. The magnitude and phasor angle errors were applied based on the standard and product specifications of References [
13] and [
24,
25,
26]. For random error tests, the standard normal distribution that has the range of standard deviation 3σ was applied. In the measurement noise test, every fault case for the main feeder showed an accuracy of approximately 100%. In the fault cases of the lateral feeder, the accuracies were about 100% when the fault point resistance was 20 Ω and below. The fault location was identified with a minimum accuracy of 97.6% when the fault point resistance was 30 Ω. This can be seen to occur because the deviation for the magnitude of voltage and current and phasor angle between the buses was very small due to the fault resistance. However, the main feeder connected buses with the lateral feeder performed an estimation close to 100%. This will not be a big problem because the distance of the lateral feeder is short when there is restoration of the actual distribution networks. The fault location result is also estimated to be close to 100% for the lateral feeder 3 when additional PMU is installed at the end of lateral feeder 3. Therefore, the number of PMUs is reduced compared to the existing method, and similar effects can be obtained when additional PMUs are installed only in the lateral feeder having a low fault location estimation rate. As shown in the test results for phasor measurement error, 2° or higher phasor angle errors influenced the fault location estimation result. However, this will not be a problem when applying the proposed algorithm because the maximum measurement error of phasor angle is 0.57° in Ref. [
13,
26], which is the specification of a commercial PMU product.
(4) The most remarkable advantage of the proposed method can be summarized as follows. The existing studies require the installation of many PMUs to estimate the impact of PVs and a fault location in the lateral feeder. The proposed method can achieve the same effect by using two PMUs at the main feeder, the RTUs, and the short circuit analysis method. The installation of additional PMUs causes a communication cost and infrastructure burden for the operation of distribution systems. As pointed out above, the proposed method will reduce the communication cost and accomplish accurate fault locations. These are significant improvements. Two problems that are worthy of notice still exist. First, the distribution networks are regularly reconfigured once or twice a year to ensure a load balance in each season and secure fault restoration reserves. For this reason, the locations of the PMUs installed at both ends of the main feeder may change. However, if the change of the PMU installation point from the reconfiguration of the distribution network may be excluded, the proposed method is sufficiently applicable to the actual distribution network.
Second, the proposed method estimates the fault location by adding minimum PMUs in an existing network where RTUs are installed. Therefore, the proposed method can be applied to the systems where automation of the distribution system is applied (urban systems in Asia (including South Korea, Japan, Hong Kong, Singapore, etc.), Europe, and North America). However, we assumed the installation of RTUs for large capacity DER (such as PV), and applied the output ratio of large-capacity PV for small-capacity PVs. Hence, the cost can be increased by the installation of additional RTUs. However, this additional cost can be sufficiently covered by the actual operation because: (1) The PV output has a significant effect on the voltage and other problems recently in the operation of the distribution network. Therefore, the measurement of PV output is increasingly important for real-time operation of the distribution network (monitoring and control) and for establishing operation planning through PV output prediction. (2) The range of fault location can be reduced from the section with remote controlled switch to the section with manual switch. Furthermore, the fault location can be identified through data transfer between PMUs, which has the advantage of shortening the isolation time of the faulted section and the restoration time of the un-faulted sections. As mentioned above, the grid modernization and the introduction of new operating system also justify the additional installation of these new measuring devices.
Additionally, according to IEEE 1547 [
27], DER is tripped after a voltage abnormally is detected for anti-islanding. This standard specifies the minimum trip time as 0.16 s (10 cycles). However, the PV trip will not have a significant effect because the faulted section estimation using the PMU measurements uses measurements of much faster time than the time mentioned above.
The management of distribution networks becomes a more complicated task due to the DERs. The improvement in reliability is one of the essential purposes for managing a distribution network. If the results of this study are utilized for network restoration in association with the distribution network management or for the agent-based fault recovery through device-to-device communication the reliability of distribution network will be more significantly improved than before.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}