Circuit Structure and Control Method to Reduce Size and Harmonic Distortion of Interleaved Dual Buck Inverter


Abstract
:1. Introduction
2. Proposed Interleaved Dual-buck Inverter
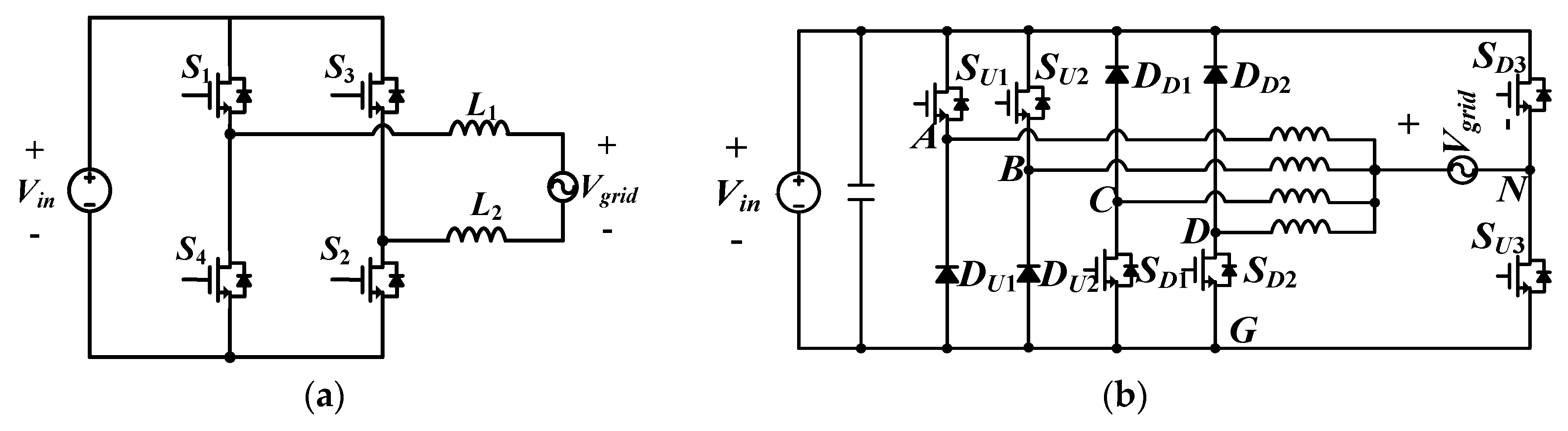
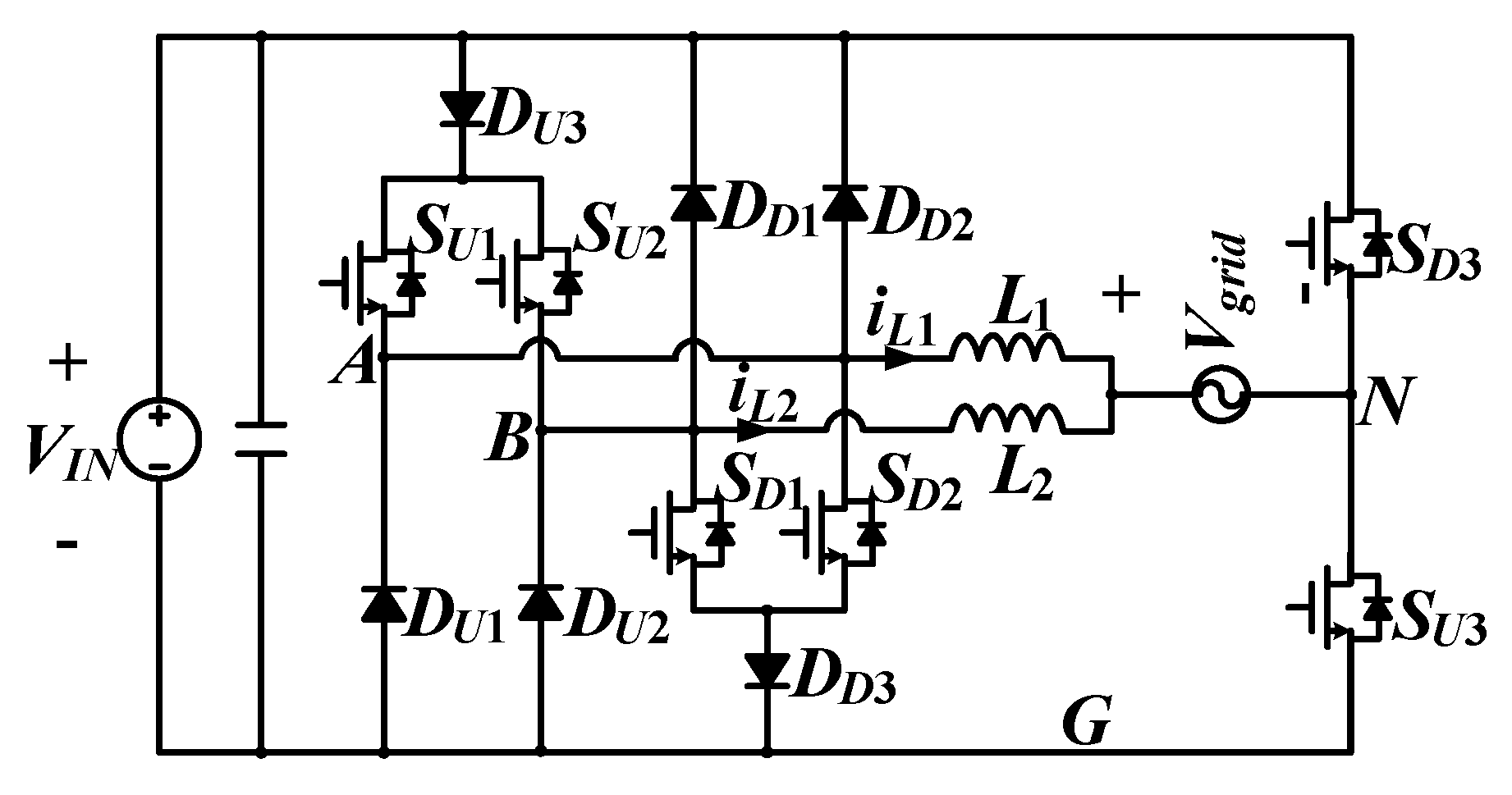
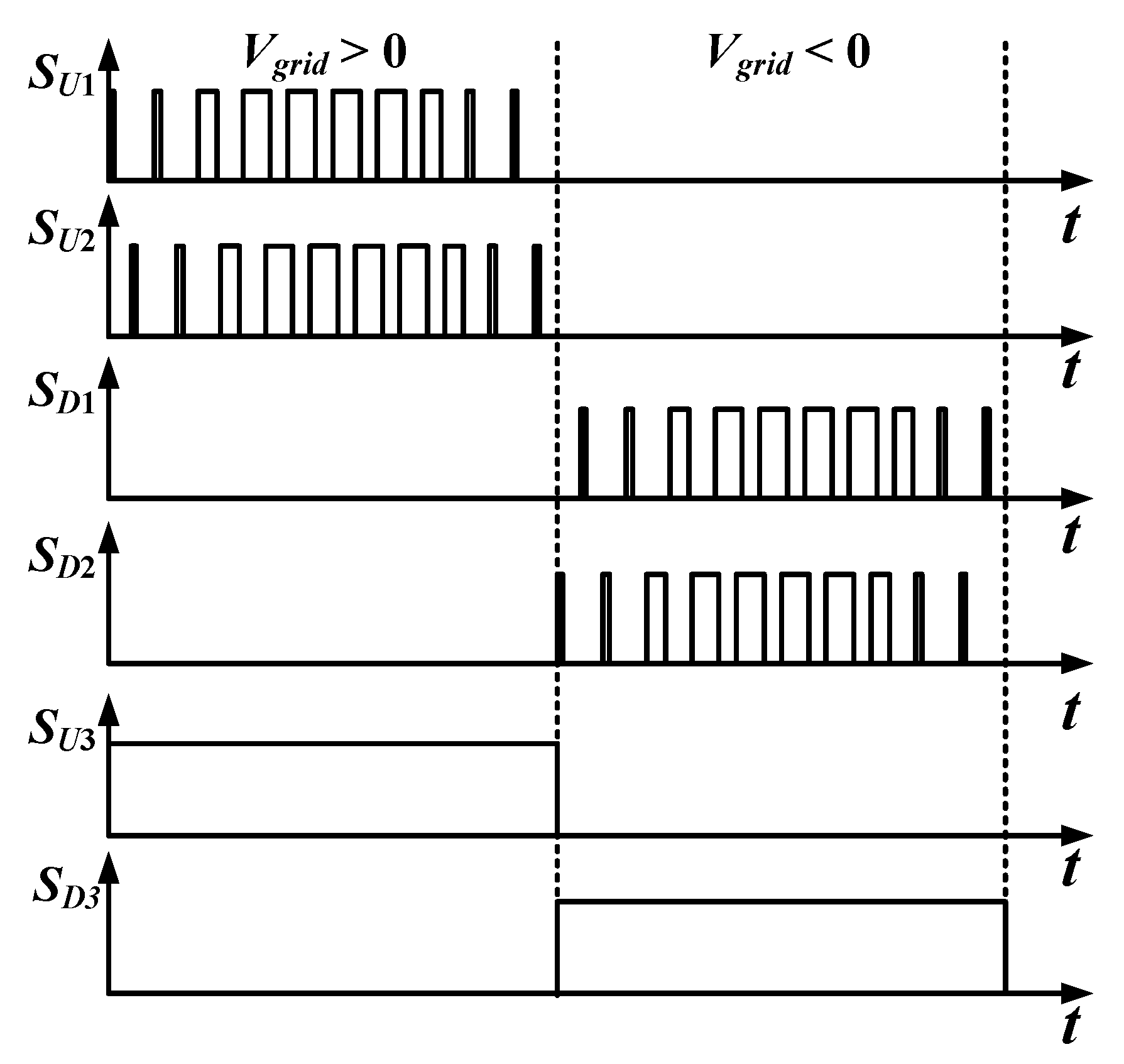
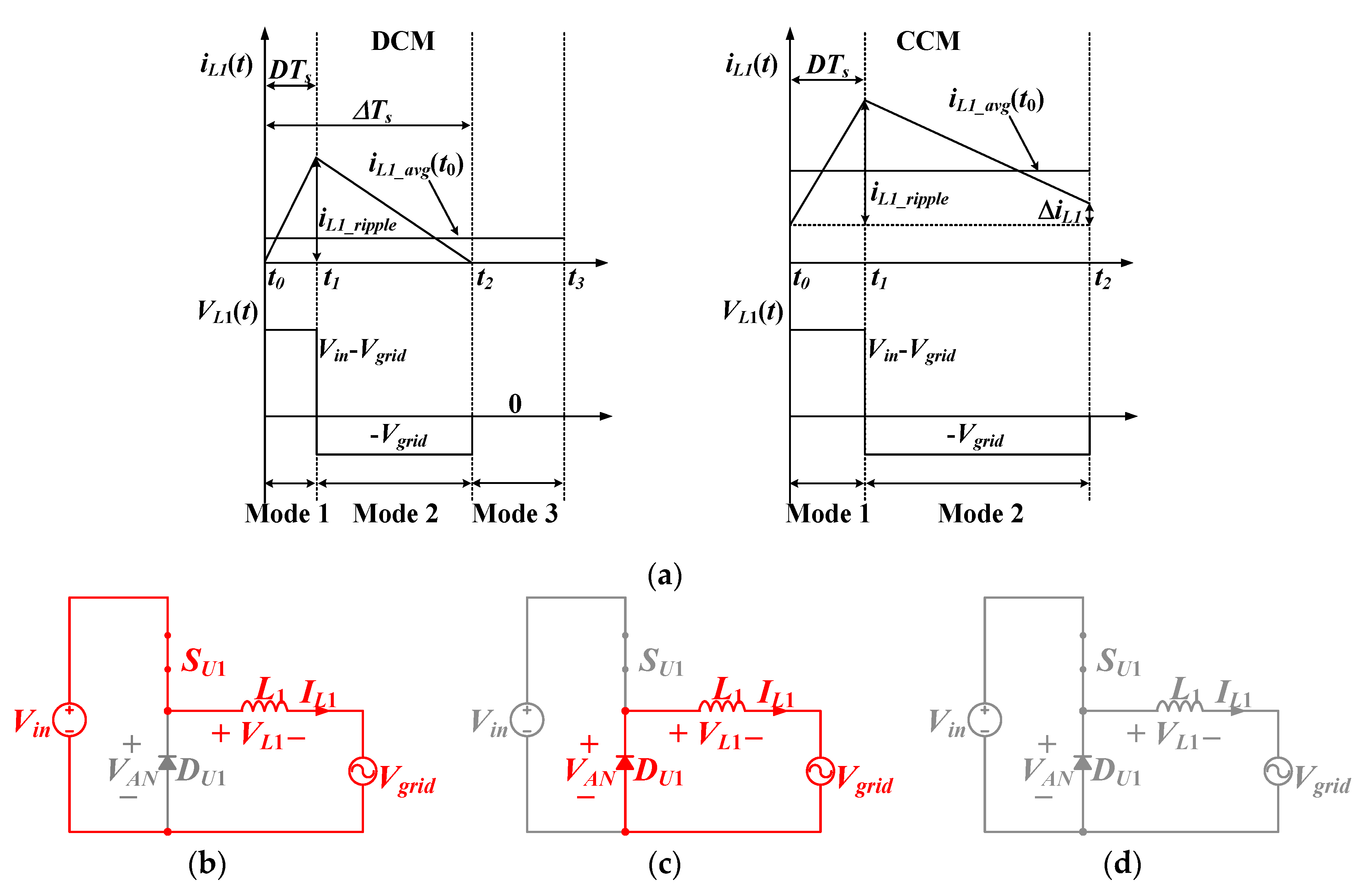
2.1. Circuit Structure and Principle of Operation
2.2. Design Constraint for L1 and L2
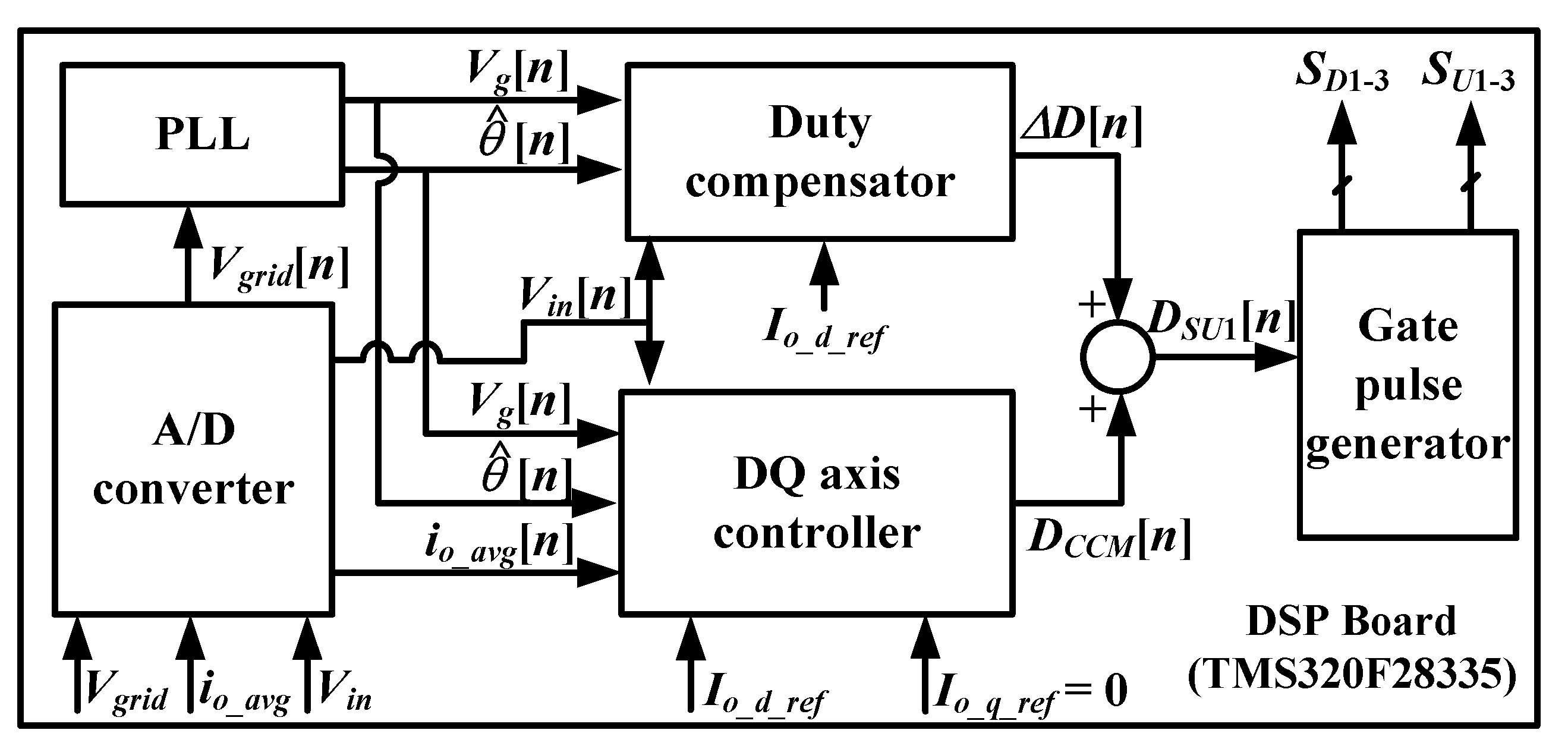
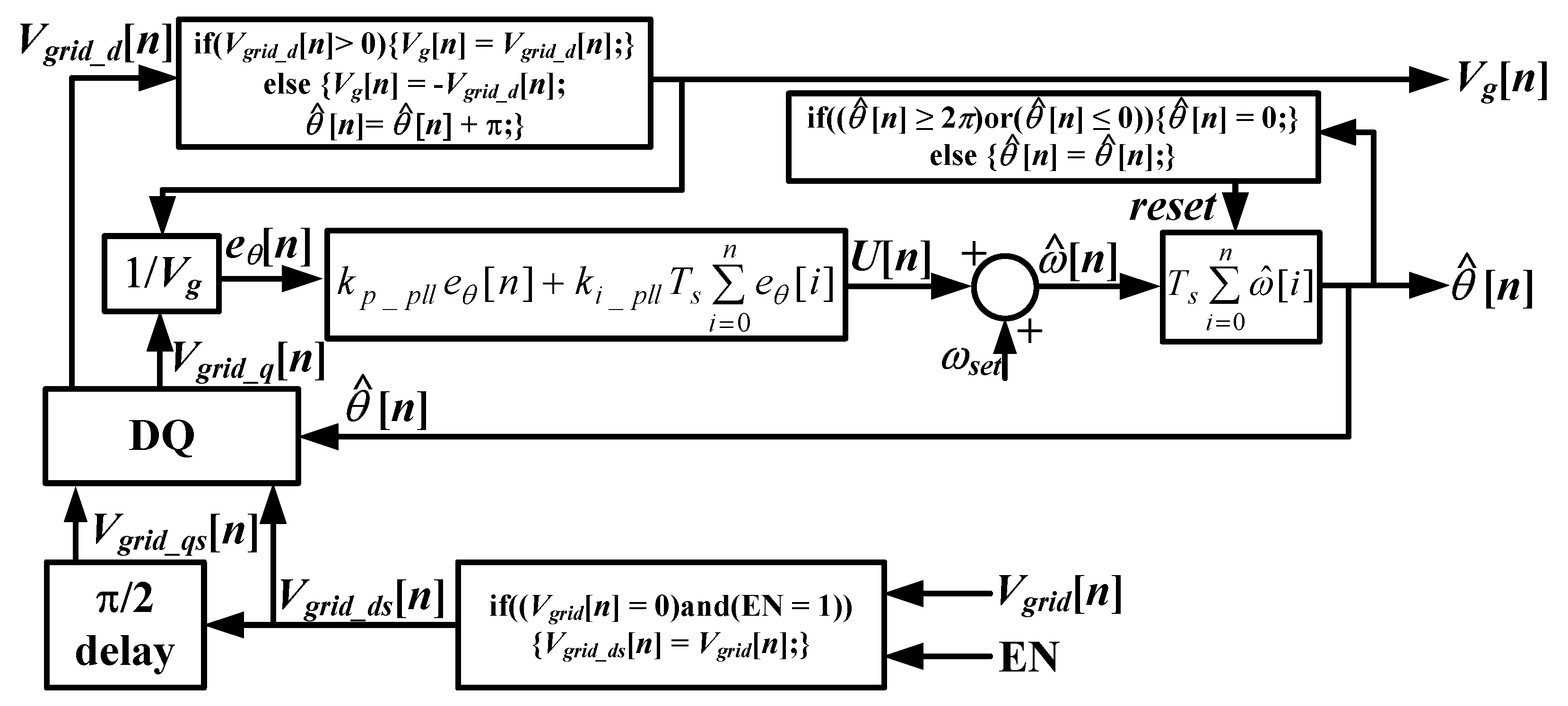
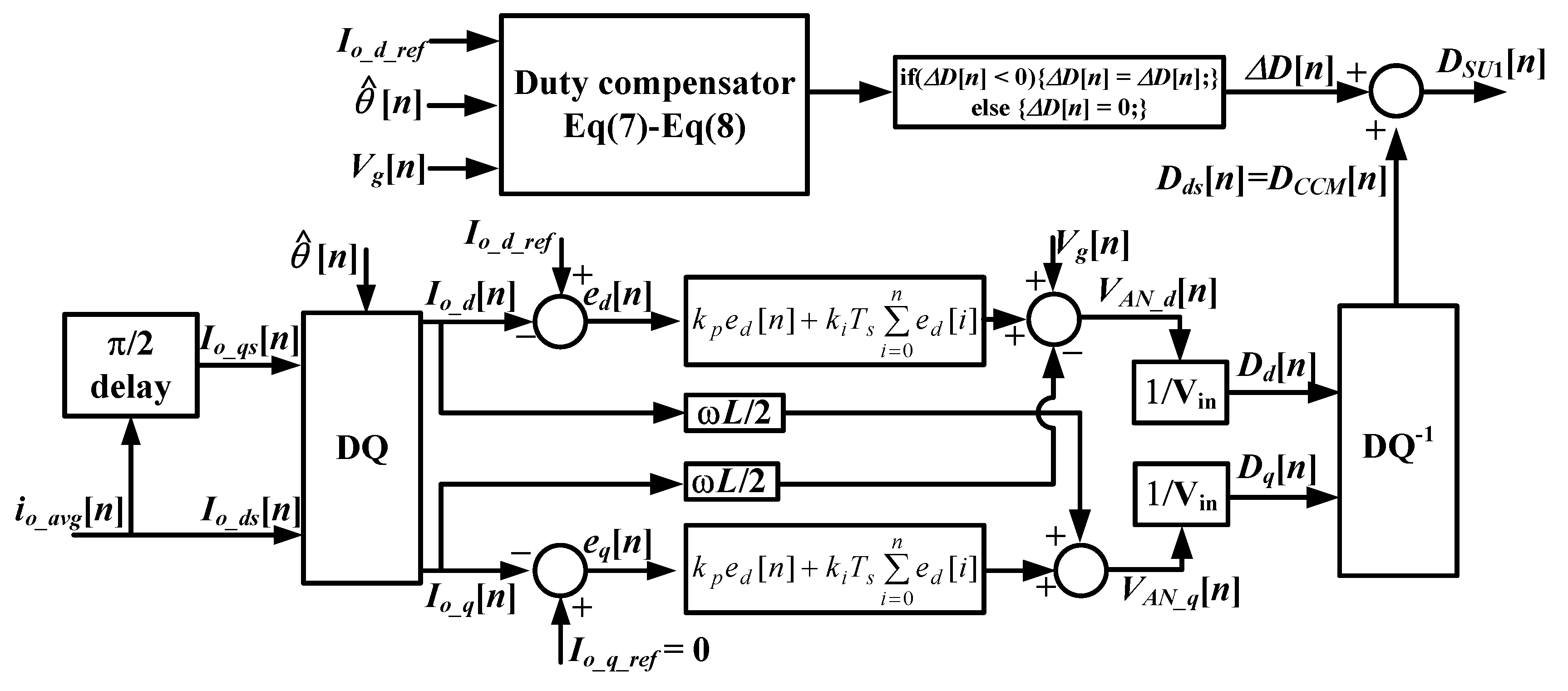
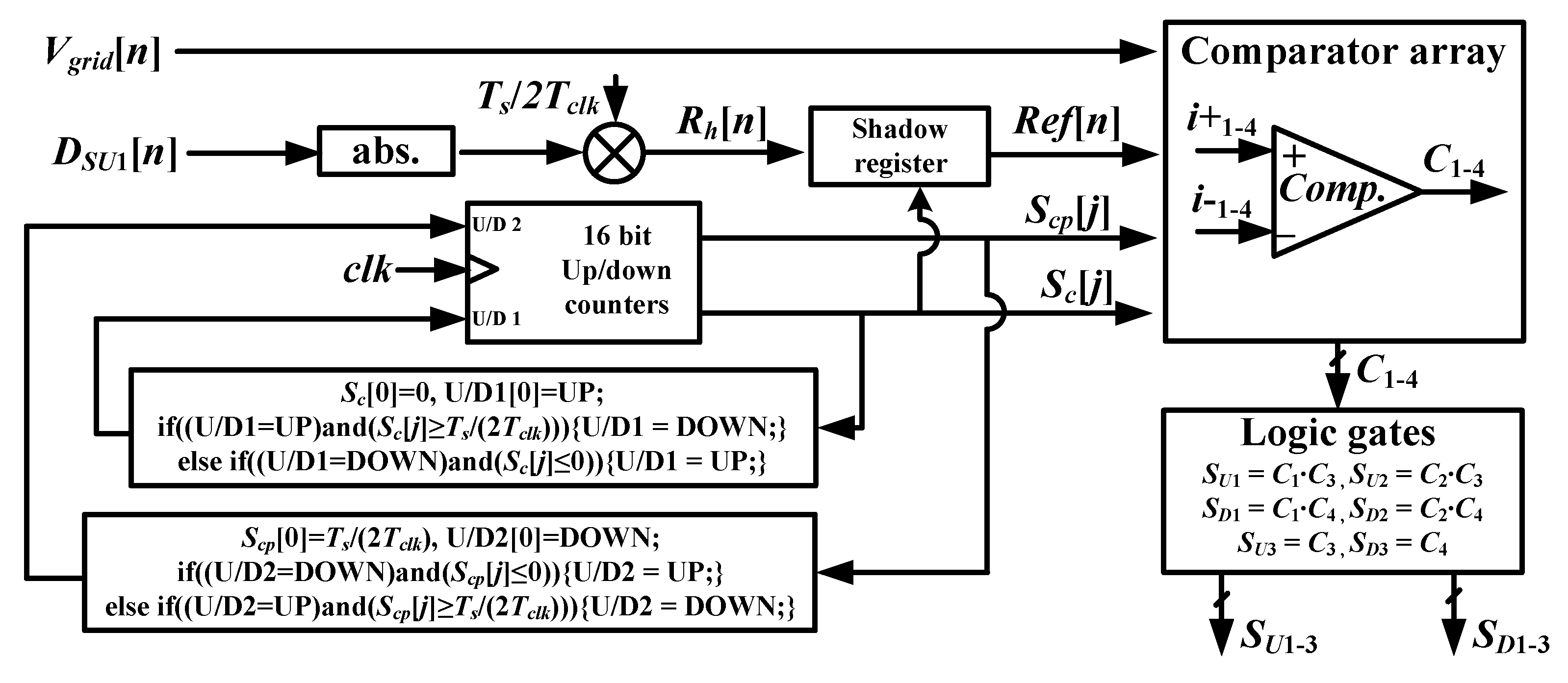
2.3. Controller Design
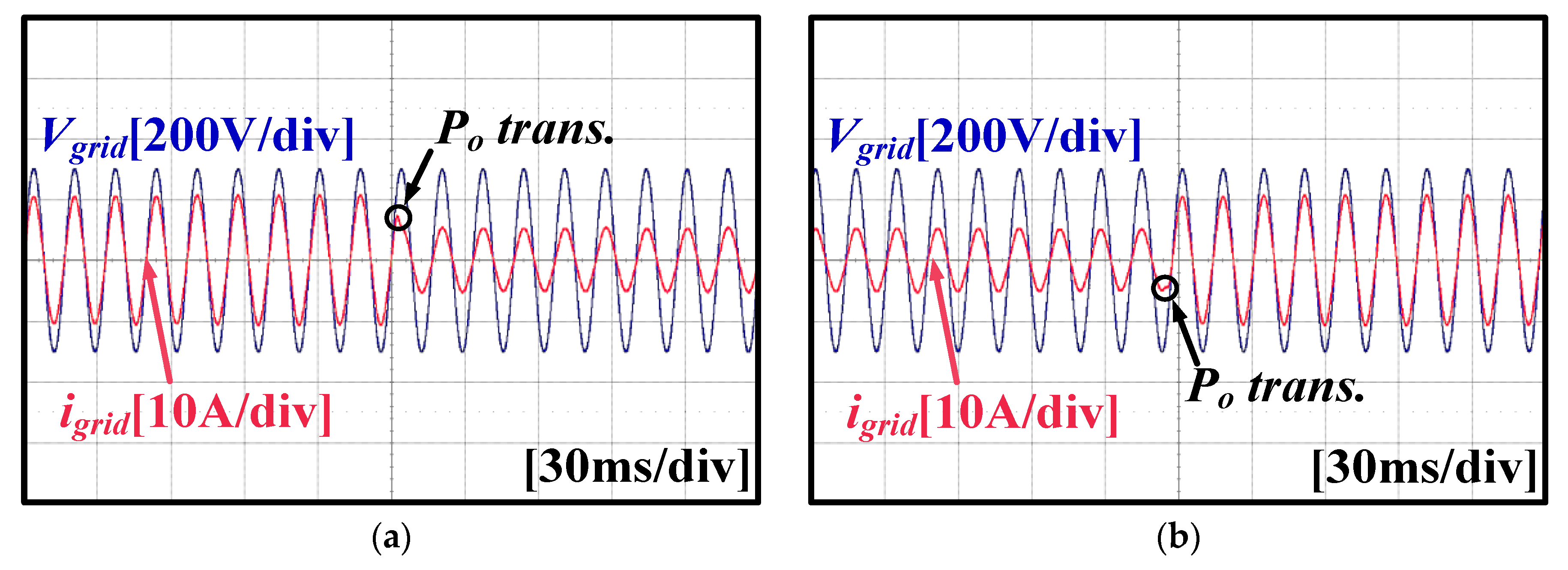
3. Experimental Results and Discussions
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Output of comparators in the PWM generator. | |
| Switching duty of the proposed inverter. | |
| Amplitude of parallel to . | |
| Low-side freewheeling diodes of the proposed inverter and IDBI [9]. | |
| Amplitude of orthogonal to . | |
| Switching duty of in the proposed inverter. | |
| High-side freewheeling diodes of the proposed inverter and IDBI [9]. | |
| Blocking diodes of the proposed inverter. | |
| Control errors of and in the D-Q axis controller (A). | |
| Estimation error of in the phased locked loop (rad). | |
| Clock frequency (Hz), and period (s) of TMS320F28335 digital signal processor. | |
| Switching frequency (Hz) and period (s). | |
| Inductor currents of the proposed inverter (A). | |
| Time average of and of the proposed inverter (A). | |
| Amplitude of (A). | |
| Time averaged value of the output current io for one switching period (A). | |
| Amplitude of parallel to (A). | |
| Reference values of and for the D-Q axis controller (A). | |
| Amplitude of orthogonal to (A). | |
| Ripple in output current of the proposed inverter (A). | |
| Control coefficients94768 for the D-Q axis controller. | |
| Control coefficients for the phased locked loop. | |
| Output filter inductors (H). | |
| Sampling and clock sequence numbers. | |
| Ref | Reference input for the comparator array in the PWM generator. |
| High frequency switches of FBI [1]. | |
| Counter outputs for PWM. | |
| Low-side high frequency switches of the proposed inverter and IDBI [9]. | |
| Low-side unfolding switch of the proposed inverter and IDBI [9]. | |
| High-side high frequency switches of the proposed inverter and IDBI [9]. | |
| High-side unfolding switch of the proposed inverter and IDBI [9]. | |
| Temperature of switches (°C). | |
| Leg voltage with respect to the ground (V). | |
| Time averaged value of for one switching period (V). | |
| Amplitude of parallel to (V). | |
| Amplitude of orthogonal to (V). | |
| Amplitude of (V). | |
| AC output voltage (AC grid voltage) (V). | |
| DC input voltage (V). | |
| Voltages across the output filter inductors L1 and L2 (V). | |
| Time averaged values of and for one switching period (V). | |
| Difference of switching duties for CCM and DCM operations. | |
| Duration of for one switching period (s). | |
| Phase angle of (rad). | |
| Estimated by the phased locked loop (rad). | |
| Power conversion efficiency of inverters. | |
| Angular frequency of (rad/s). | |
| Nominal value of (rad/s). |
References
- Mazumder, S.K.; Nayfeh, A.H.; Boroyevich, D. Theoretical and experimental investigation of the fast—and slow-scale instabilities of a DC–DC converter. IEEE Trans. Power Electron. 2001, 16, 201–216. [Google Scholar] [CrossRef]
- Hwang, S.; Kim, J. Dead time compensation method for voltage-fed PWM inverter. IEEE Trans. Energy Convers. 2010, 25, 1–10. [Google Scholar] [CrossRef]
- Herran, M.A.; Fischer, J.R.; Gonzalez, A.; Judewicz, M.G.; Carrica, D.O. Adaptive dead-time compensation for grid-connected PWM inverters of single-stage PV systems. IEEE Trans. Power Electron. 2013, 28, 2816–2825. [Google Scholar] [CrossRef]
- Kang, F.S.; Park, S.-J.; Cho, S.E.; Kim, C.U.; Ise, T. Multilevel PWM inverters suitable for the use of stand-alone photovoltaic power systems. IEEE Trans. Energy Convers. 2005, 20, 906–915. [Google Scholar] [CrossRef]
- Zhou, J.; Huang, C.; Cheng, C.; Zhao, F. A Comprehensive Analytical Study of Dielectric Modulated Drift Regions—Part I: Static Characteristics. IEEE Trans. Electron. Devices 2016, 63, 2255–2260. [Google Scholar] [CrossRef]
- Araújo, S.V.; Zacharias, P.; Mallwitz, R. Highly Efficient Single-Phase Transformerless Inverters for Grid-Connected Photovoltaic Systems. IEEE Trans. Ind. Electron. 2010, 57, 3118–3128. [Google Scholar] [CrossRef]
- Yao, Z.; Xiao, L.; Yan, Y. Control strategy for series and parallel output dual-buck half bridge inverters based on DSP control. IEEE Trans. Power Electron. 2009, 24, 434–444. [Google Scholar]
- Liu, J.; Yan, Y. A Novel Hysteresis Current Controlled Dual Buck Half Bridge Inverter. In Proceedings of the IEEE 34th Annual Conference on Power Electronics Specialists (PESC), Acapulco, Mexico, 15–19 June 2003; IEEE: Piscataway, NJ, USA, 2003; pp. 1615–1620. [Google Scholar]
- Hong, F.; Liu, J.; Ji, B.; Zhou, Y.; Wang, J. Interleaved Dual Buck Full-Bridge Three-Level Inverter. IEEE Trans. Power Electron. 2016, 31, 964–974. [Google Scholar] [CrossRef]
- Zhou, L.W.; Gao, F. Dual Buck Inverter with Series Connected Diodes and Single Inductor. In Proceedings of the 2016 IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 21 March 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 2259–2263. [Google Scholar]
- Hong, F.; Liu, J.; Ji, B.; Zhou, Y. Single Inductor Dual Buck Full-Bridge Inverter. IEEE Trans. Ind. Electron. 2015, 62, 4869–4877. [Google Scholar] [CrossRef]
- Zhou, L.; Gao, F. Improved Transformerless Dual Buck Inverters with Buffer Inductors. In Proceedings of the 2016 IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 21 March 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 2935–2941. [Google Scholar]
- Yang, M.K.; Kim, Y.J.; Choi, W.Y. Power Efficiency Improvement of Dual-Buck Inverter with SiC Diodes using Coupled Inductors. In Proceedings of the 2018 IEEE 6th Workshop on Wide Bandgap Power Devices and Applications (WiPDA), Atlanta, GA, USA, 31 October–2 November 2018; pp. 56–59. [Google Scholar]
- Nguyen, T.T.; Cha, H.Y.; Nguyen, B.L.; Kim, H.G. A Novel Single-Phase Three-Level Dual-Buck Inverter. IEEE Trans. Power Electron. (accepted). [CrossRef]
- Kow, B.; Wei, J.; Zhang, L. Switching and Conduction Losses Reduction of Dual Buck Full Bridge Inverter through ZVT Soft-Switching under Full-Cycle Modulation. IEEE Trans. Power Electron. (accepted).
- Johnson, J. Improving Buck Converter Light-Load Efficiency. Power Electron. Eur. 2015, 5, 17–18. [Google Scholar]
- Zhang, R.; Cardinal, M.; Szczesny, P.; Dame, M. A grid simulator with control of single-phase power converters in D-Q rotating frame. In Proceedings of the 2002 IEEE 33rd Annual IEEE Power Electronics Specialists Conference (PESC), Cairns, QLD, Australia, 23–27 June 2002; pp. 1431–1436. [Google Scholar]
- Nise, N.S. Chapter 4, Time response. In Control System Engineering, 4th ed.; Dumas, S., Kulesa, T., Sayre, D., Eds.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2004; Volume 1, pp. 198–201. [Google Scholar]
- VDE Association for Electrical Electronic and Information Technologies. VDE-AR-N 4105:2011-08 Power Generation Systems Connected to the Low-Voltage Distribution Network; VDE Association for Electrical, Electronic and Information Technologies: Frankfurt, Germany, 2011. [Google Scholar]
- IEEE Standards Association. IEEE 1547 Standard for Interconnecting Distributed Resources with Electric Power Systems; IEEE Standards Association: Piscataway, NJ, USA, 2003. [Google Scholar]
- Korean Agency for Technology and Standards. SGSF-04-2012-07 General Performance Requirements of PCS (Power Conditioning System) for Energy Storage Systems; Smart Grid Standardization Forum: Seoul, Korea, 2012. [Google Scholar]
- Operation Directorate of Energy Network Association. Engineering Recommendation G83, Issue 2; Energy Networks Association: London, UK, 2012. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vgrid | ≥0 V | <0 V |
|---|---|---|
| SU1 | ON/OFF | OFF |
| SU2 | ON/OFF | OFF |
| SU3 | ON | OFF |
| SD1 | OFF | ON/OFF |
| SD2 | OFF | ON/OFF |
| SD3 | OFF | ON |
| VAN_on | Vin | −Vin |
| VAN_off | 0 | 0 |
| Output | i + n | i − n |
|---|---|---|
| C1 | Ref[n] | Sc[j] |
| C2 | Ref[n] | Scp[j] |
| C3 | Vgrid[n] | 0 |
| C4 | 0 | Vgrid[n] |
| Components | IDBI [9] | FBI | Proposed Inverter | |
|---|---|---|---|---|
| HF Switches | Name | FCH110N65F | FCH110N65F | FCH110N65F |
| Price ($) | 5.03 | 5.03 | 5.03 | |
| Number | 4 (SU1, SU3, SD1, SD2) | 4 (S1 - S4) | 4 (SU1, SU3, SD1, SD2) | |
| LF Switches | Name | IXFK80N60P3 | - | IXFK80N60P3 |
| Price ($) | 5.03 | - | 5.03 | |
| Number | 2 (SU3, SD3) | - | 2 (SU3, SD3) | |
| Diodes | Name | 30ETH06 | - | 30ETH06 |
| Price ($) | 1.59 | - | 1.59 | |
| Number | 4 (DU1, DU2, DD1, DD2) | - | 6 (DU1 − DU3, DD1 − DD3) | |
| Inductor core | Part Name | EER6062 | EC90 | EER6062 |
| Price ($) | 4.94 | 16.17 | 4.94 | |
| Number | 4 | 2 | 2 | |
| Electrolytic capacitor | Part Name | EKMR451VS N681MA50S | EKMR451VS N681MA50S | EKMR451VS N681MA50S |
| Price ($) | 2.68 | 2.68 | 2.68 | |
| Number | 8 | 8 | 8 | |
| Total costs ($) | 77.74 | 73.9 | 71.04 | |
| Circuit Parameters | Proposed Inverter | IDBI [9] | FBI | ||
|---|---|---|---|---|---|
| # of switches | 6 | 6 | 4 | ||
| # of diodes | 6 | 4 | 0 | ||
| # of inductors | 2 | 4 | 2 | ||
| Vsw,max | Unfolding | Vin (404 V) | Vin (404 V) | - | |
| Switching | Vin (413 V) | Vin (415 V) | Vin (423 V) | ||
| Isw,max | Unfolding | Io (13.1 A) | Io (13.5 A) | - | |
| Switching | Io/2 (5.8 A) | Io/2 (6.0 A) | Io (13.5 A) | ||
| Inductance | 2.5 mH | 2.5 mH | 2.5 mH | ||
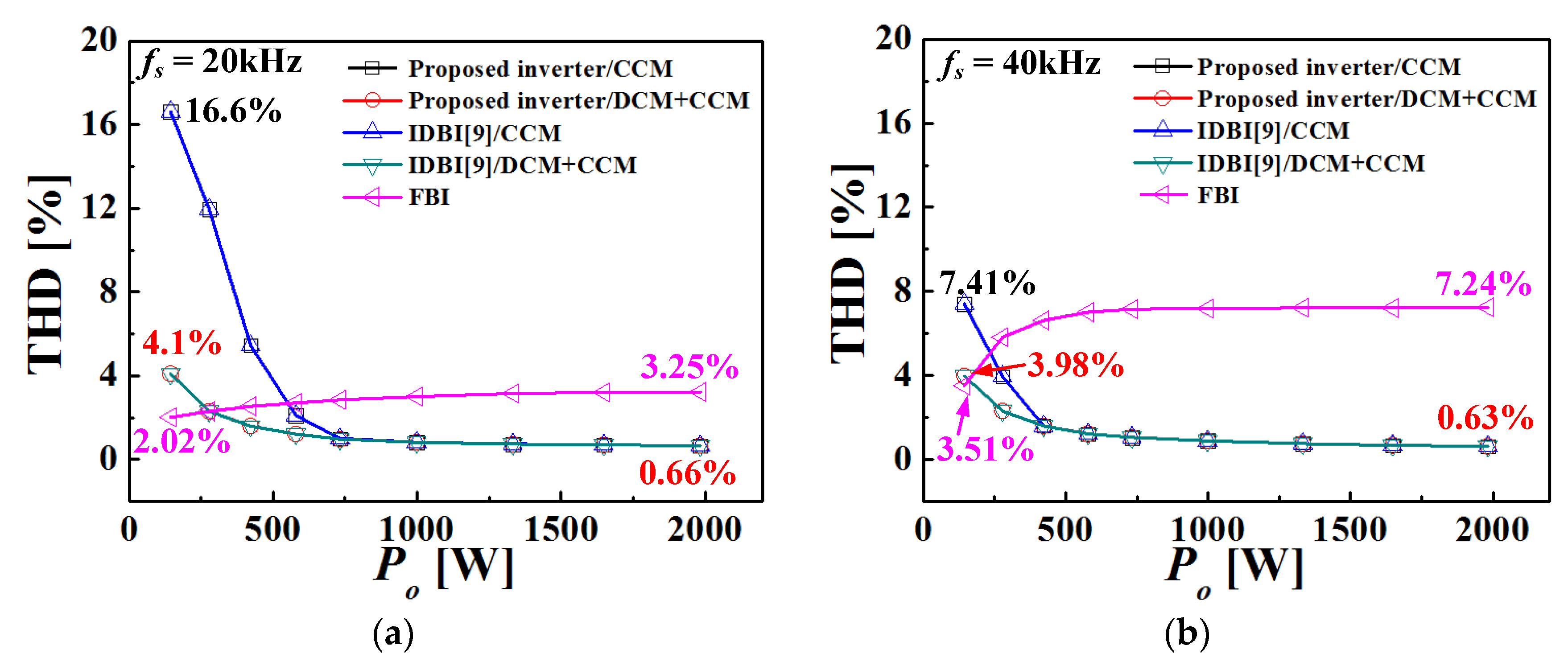
| THD at Po = 2 kW | 0.66% | 0.66% | 3.25% | ||
| Maximum efficiency | 98.5% | 98.4% | 95.2% | ||
| Efficiency at Po = 2 kW | 98.3% | 98.2% | 95.0% | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cho, M.-G.; Lee, S.-H.; Lee, H.-S.; Choi, Y.-G.; Kang, B. Circuit Structure and Control Method to Reduce Size and Harmonic Distortion of Interleaved Dual Buck Inverter. Energies 2020, 13, 1531. https://doi.org/10.3390/en13061531
Cho M-G, Lee S-H, Lee H-S, Choi Y-G, Kang B. Circuit Structure and Control Method to Reduce Size and Harmonic Distortion of Interleaved Dual Buck Inverter. Energies. 2020; 13(6):1531. https://doi.org/10.3390/en13061531
Chicago/Turabian StyleCho, Min-Gi, Sang-Hoon Lee, Hyeon-Seok Lee, Yoon-Geol Choi, and Bongkoo Kang. 2020. "Circuit Structure and Control Method to Reduce Size and Harmonic Distortion of Interleaved Dual Buck Inverter" Energies 13, no. 6: 1531. https://doi.org/10.3390/en13061531
APA StyleCho, M. -G., Lee, S. -H., Lee, H. -S., Choi, Y. -G., & Kang, B. (2020). Circuit Structure and Control Method to Reduce Size and Harmonic Distortion of Interleaved Dual Buck Inverter. Energies, 13(6), 1531. https://doi.org/10.3390/en13061531