Analysis and Mitigation of Sub-Synchronous Resonance for Doubly Fed Induction Generator under VSG Control



Abstract
:1. Introduction
2. VSG Control for DFIG
3. Impedance Modeling of VSG Control for DFIG
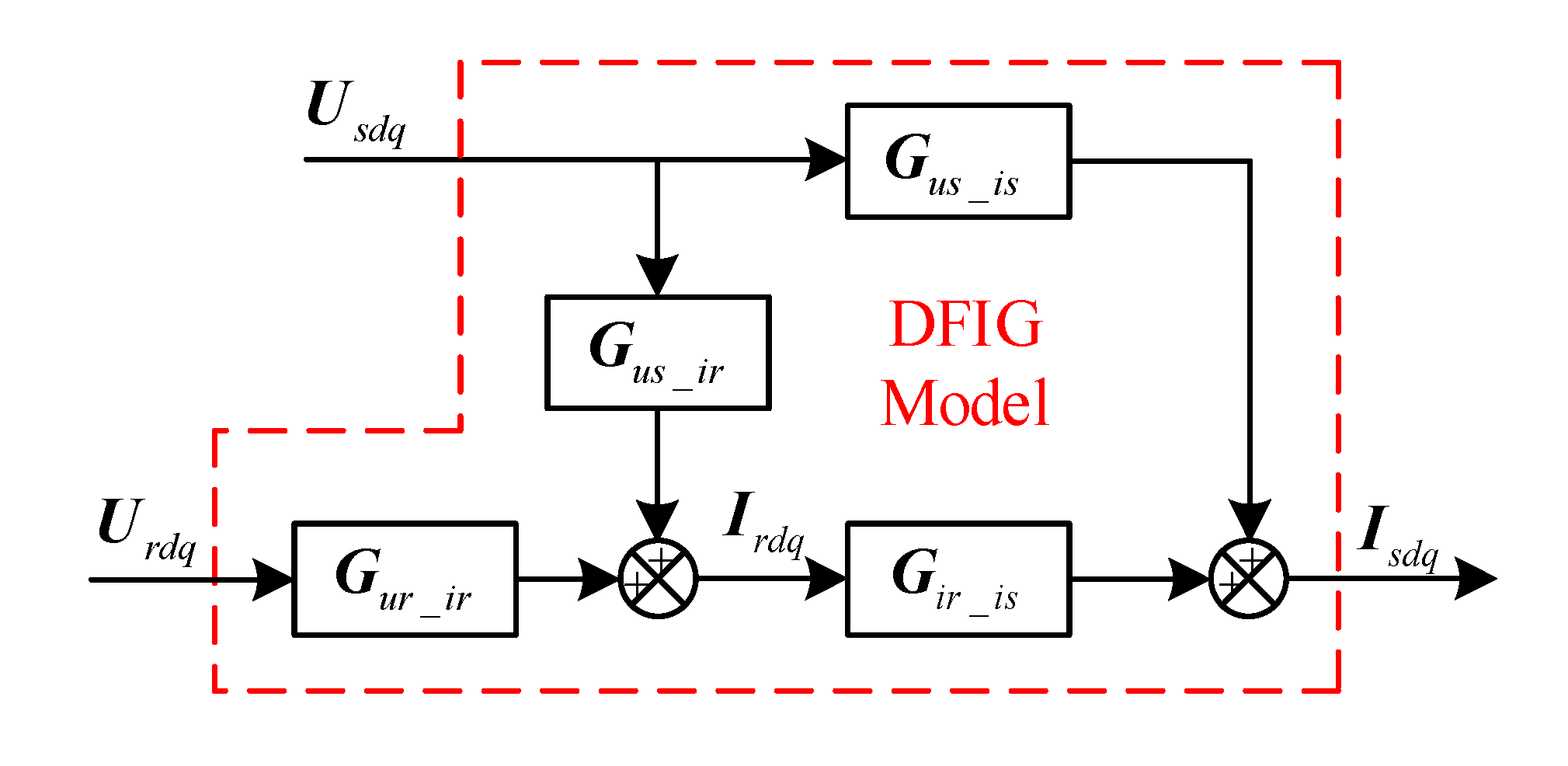
3.1. Modeling of DFIG
3.2. Modeling of Power and Voltage Amplitude
3.3. Modeling of VSG Control
3.4. Modeling of Frame Transformation
3.5. Modeling of Rotor Voltage
3.6. Sequence Impedance of VSG Control for DFIG
4. Impedance Validation and SSR Analysis
4.1. Impedance Validation
4.2. SSR Analysis
- The DFIG with VSG control also has the SSR problem, when the weak grid reaches a high compensation level.
- The correctness of proposed impedance model is validated based on the frequency scanning and SSR prediction.
- Compared with the impedance model only considering current control, the proposed impedance model is more accurate, which indicates that VSG control has an important influence on the SSR.
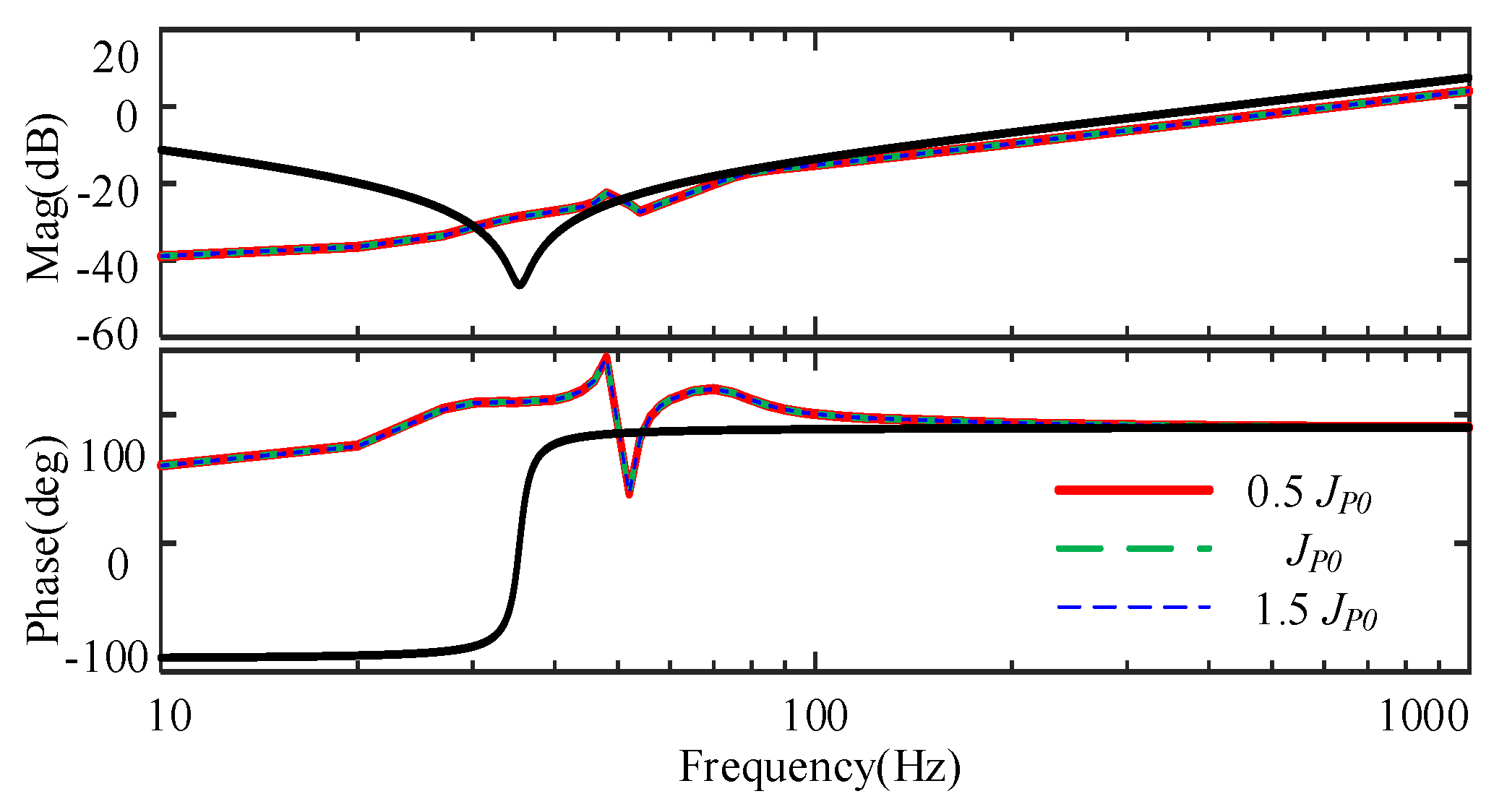
4.3. Influence and Configuration of VSG Control Parameters
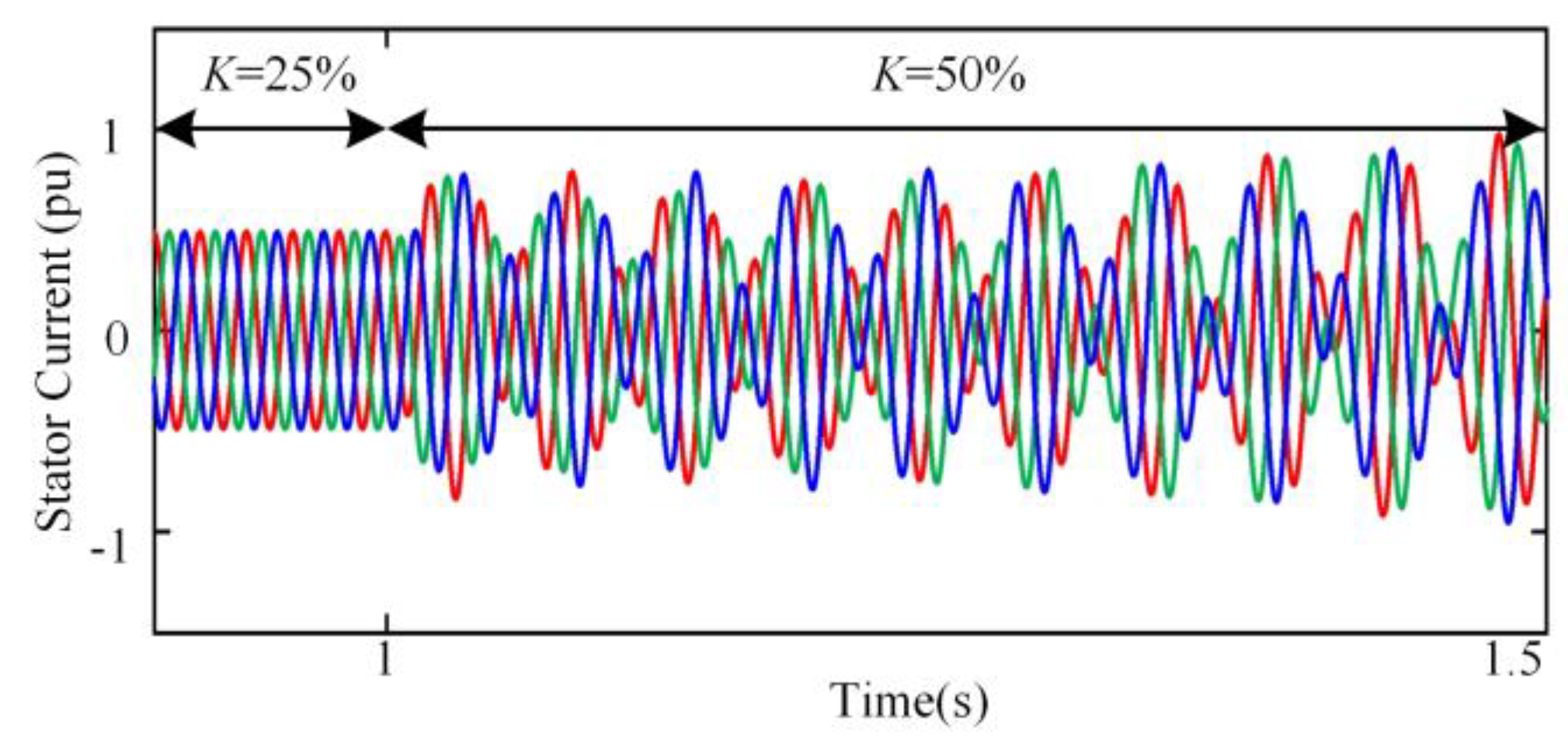
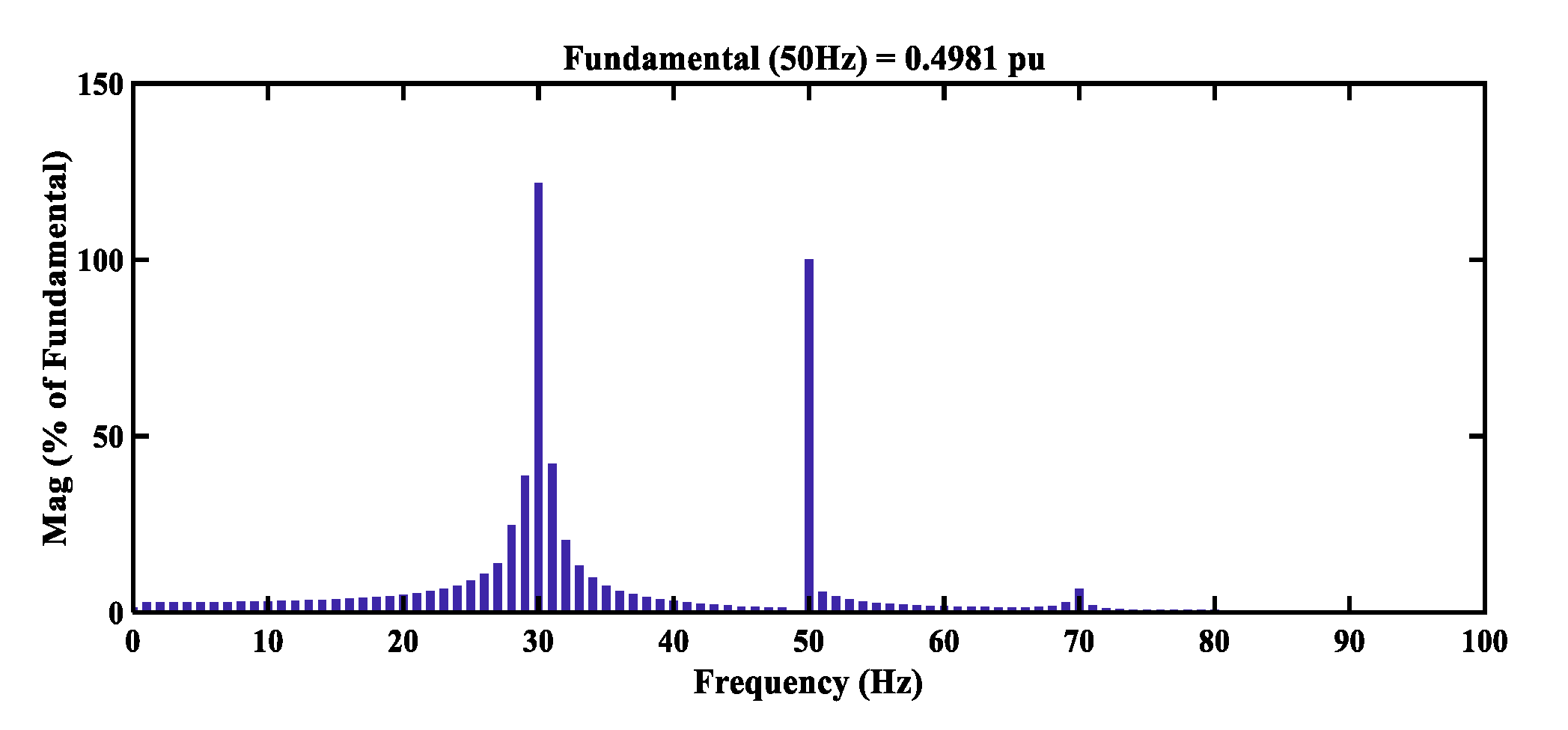
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Rated power | 2 MVA |
| Rated voltage | 690 V |
| Rated frequency | 50 Hz |
| Stator/Rotor ratio | 0.34 |
| Mutual inductance (p.u.) | 3.90 |
| Stator leakage inductance (p.u.) | 0.171 |
| Rotor leakage inductance (p.u.) | 0.167 |
| Stator resistance (p.u.) | 0.0127 |
| Rotor resistance (p.u.) | 0.0127 |
| DC voltage | 1200 V |
| Inertia of active power JP0 | 100 |
| Damping of active power DP0 | 318310(50 × 2 × 10^6/(100π)) |
| Inertia of reactive power JQ0 | 100 |
| Damping of reactive power DQ0 | 17750(5 × 2 × 10^6/( × 690)) |
| Flux control coefficient kP, kI | 1, 10 |
| Parameters | Value |
|---|---|
| Transformer ratio | 690 V/161 KV |
| Rated power | 100 MVA |
| Line resistance | 0.02 pu |
| Line inductance | 0.5 pu |
| Line capacitive reactance at 50% compensation level | 64.8 Ω |
References
- Chen, Z.; Guerrero, J.M.; Blaabjerg, F. A review of the state of the art of power electronics for wind turbines. IEEE Trans. Power Electron. 2009, 24, 1859–1875. [Google Scholar] [CrossRef]
- Tapia, A.; Tapia, G.; Ostolaza, J.X.; Saenz, J.R. Modeling and control of a wind turbine driven doubly fed induction generator. IEEE Trans. Energy Convers. 2003, 18, 194–204. [Google Scholar] [CrossRef] [Green Version]
- Blaabjerg, F.; Ma, K. Future on power electronics for wind turbine systems. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 139–152. [Google Scholar] [CrossRef]
- Driesen, J.; Visscher, K. Virtual synchronous generators. In Proceedings of the 2008 IEEE Power and Energy Society General Meeting—Conversion and Delivery of Electrical Energy in the 21st Century, Pittsburgh, PA, USA, 20–24 July 2008; pp. 1–3. [Google Scholar]
- Zhong, Q.; Nguyen, P.; Ma, Z.; Sheng, W. Self-synchronized synchronverters: Inverters without a dedicated synchronization unit. IEEE Trans. Power Electron. 2014, 29, 617–630. [Google Scholar] [CrossRef]
- Alipoor, J.; Miura, Y.; Ise, T. Power system stabilization using virtual synchronous generator with alternating moment of inertia. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 451–458. [Google Scholar] [CrossRef]
- D’Arco, S.; Suul, J.A. Equivalence of virtual synchronous machines and frequency-droops for converter-based MicroGrids. IEEE Trans. Smart Grid 2014, 5, 394–395. [Google Scholar] [CrossRef]
- Liu, J.; Miura, Y.; Ise, T. Comparison of dynamic characteristics between virtual synchronous generator and droop control in inverter-based distributed generators. IEEE Trans. Power Electron. 2016, 31, 3600–3611. [Google Scholar] [CrossRef]
- Wang, S.; Hu, J.; Yuan, X.; Sun, L. On inertial dynamics of virtual-synchronous-controlled dfig-based wind turbines. IEEE Trans. Energy Convers. 2015, 30, 1691–1702. [Google Scholar] [CrossRef]
- Wang, S.; Hu, J.; Yuan, X. Virtual synchronous control for grid-connected dfig-based wind turbines. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 932–944. [Google Scholar] [CrossRef]
- Huang, L.; Xin, H.; Zhang, L.; Wang, Z.; Wu, K.; Wang, H. Synchronization and frequency regulation of dfig-based wind turbine generators with synchronized control. IEEE Trans. Energy Convers. 2017, 32, 1251–1262. [Google Scholar] [CrossRef]
- Reader’s guide to subsynchronous resonance. IEEE Trans. Power Syst. 1992, 7, 150–157. [CrossRef]
- Irwin, G.D.; Jindal, A.K.; Isaacs, A.L. Sub-synchronous control interactions between type 3 wind turbines and series compensated AC transmission systems. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 24–28 July 2011; pp. 1–6. [Google Scholar]
- Wang, L.; Xie, X.; Jiang, Q.; Liu, H.; Li, Y.; Liu, H. Investigation of SSR in Practical DFIG-based wind farms connected to a series-compensated power system. IEEE Trans. Power Syst. 2015, 30, 2772–2779. [Google Scholar] [CrossRef]
- Fan, L.; Kavasseri, R.; Miao, Z.L.; Zhu, C. Modeling of DFIG-based wind farms for SSR Analysis. IEEE Trans. Power Deliv. 2010, 25, 2073–2082. [Google Scholar] [CrossRef]
- Fan, L.; Zhu, C.; Miao, Z.; Hu, M. Modal analysis of a DFIG-based wind farm interfaced with a series compensated network. IEEE Trans. Energy Convers. 2011, 26, 1010–1020. [Google Scholar] [CrossRef]
- Varma, R.K.; Auddy, S.; Semsedini, Y. Mitigation of subsynchronous resonance in a series-compensated wind farm using FACTS controllers. IEEE Trans. Energy Convers. 2008, 23, 1645–1654. [Google Scholar] [CrossRef]
- Mohammadpour, H.A.; Santi, E. Modeling and control of gate-controlled series capacitor interfaced with a dfig-based wind farm. IEEE Trans. Ind. Electron. 2015, 62, 1022–1033. [Google Scholar] [CrossRef]
- Fan, L.; Miao, Z. Mitigating SSR using DFIG-based wind generation. IEEE Trans. Sustain. Energy 2012, 3, 349–358. [Google Scholar] [CrossRef]
- Yao, J.; Wang, X.; Li, J.; Liu, R.; Zhang, H. Sub-synchronous resonance damping control for series-compensated DFIG-based wind farm with improved particle swarm optimization algorithm. IEEE Trans. Energy Convers. 2019, 34, 849–859. [Google Scholar] [CrossRef]
- Cespedes, M.; Sun, J. Impedance modeling and analysis of grid-connected voltage-source converters. IEEE Trans. Power Electron. 2014, 29, 1254–1261. [Google Scholar] [CrossRef]
- Wang, X.; Harnefors, L.; Blaabjerg, F. Unified impedance model of grid-connected voltage-source converters. IEEE Trans. Power Electron. 2018, 33, 1775–1787. [Google Scholar] [CrossRef] [Green Version]
- Miao, Z. Impedance-model-based SSR analysis for type 3 wind generator and series-compensated network. IEEE Trans. Energy Convers. 2012, 27, 984–991. [Google Scholar] [CrossRef]
- Liu, H.; Xie, X.; Zhang, C.; Li, Y.; Liu, H.; Hu, Y. Quantitative SSR analysis of series-compensated DFIG-based wind farms using aggregated RLC circuit model. IEEE Trans. Power Syst. 2017, 32, 474–483. [Google Scholar] [CrossRef]
- Wu, W.; Chen, Y.; Zhou, L.; Luo, A.; Zhou, X.; He, Z.; Yang, L.; Xie, Z.; Liu, Z.; Zhang, M. Sequence impedance modeling and stability comparative analysis of voltage-controlled vsgs and current-controlled VSGs. IEEE Trans. Ind. Electron. 2019, 66, 6460–6472. [Google Scholar] [CrossRef]
- Kundur, P.; Balu, N.J.; Lauby, M.G. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Nian, H.; Jiao, Y. Improved virtual synchronous generator control of DFIG to ride-through symmetrical voltage fault. IEEE Trans. Energy Convers. 2019. [Google Scholar] [CrossRef]


















| Inertia of Active Power | Damping of Active Power | Inertia of Reactive Power | Damping of Reactive Power |
|---|---|---|---|
| Has little influence on impedance. | Phase decreases. But limited by the grid code. | Phase varies without obvious regularity. | Phase decreases. |
| × | × | × | √ |
| Damping of reactive power | 1.5 DQ0 | 2 DQ0 | 4 DQ0 |
| Damping time | >0.8 s | <0.5 s | >0.8 s |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiao, Y.; Li, F.; Dai, H.; Nian, H. Analysis and Mitigation of Sub-Synchronous Resonance for Doubly Fed Induction Generator under VSG Control. Energies 2020, 13, 1582. https://doi.org/10.3390/en13071582
Jiao Y, Li F, Dai H, Nian H. Analysis and Mitigation of Sub-Synchronous Resonance for Doubly Fed Induction Generator under VSG Control. Energies. 2020; 13(7):1582. https://doi.org/10.3390/en13071582
Chicago/Turabian StyleJiao, Yingzong, Feng Li, Hui Dai, and Heng Nian. 2020. "Analysis and Mitigation of Sub-Synchronous Resonance for Doubly Fed Induction Generator under VSG Control" Energies 13, no. 7: 1582. https://doi.org/10.3390/en13071582
APA StyleJiao, Y., Li, F., Dai, H., & Nian, H. (2020). Analysis and Mitigation of Sub-Synchronous Resonance for Doubly Fed Induction Generator under VSG Control. Energies, 13(7), 1582. https://doi.org/10.3390/en13071582