A Multi-Class Multi-Movement Vehicle Counting Framework for Traffic Analysis in Complex Areas Using CCTV Systems



Abstract
:1. Introduction
- Tracking moving vehicles is difficult because of the high similarity of vehicle features, heavy occlusion, a large variation of viewing perspectives, and the low resolution of input videos [6].
- Determining more detail of traffic patterns such as the type of vehicles and turning volume still comprises open research issues, especially in the case of scenarios that include multiple movements (e.g., intersections or roundabouts) [7].
- The scalability of monitoring vehicle movements is a critical problem for turning volume analysis; therefore, it requires a common method that can be applied in various scenarios [8].
- An effective vehicle tracking method to avoid the switch ID and occlusion problems of vehicle tracking, especially in case of heavy occlusion, different lighting and weather conditions. Specifically, state-of-the-art detection and tracking methods are integrated into our framework.
- A comprehensive vehicle counting framework with Multi-Class Multi-Movement (MCMM) counting is presented for analyzing traffic flow in urban areas.
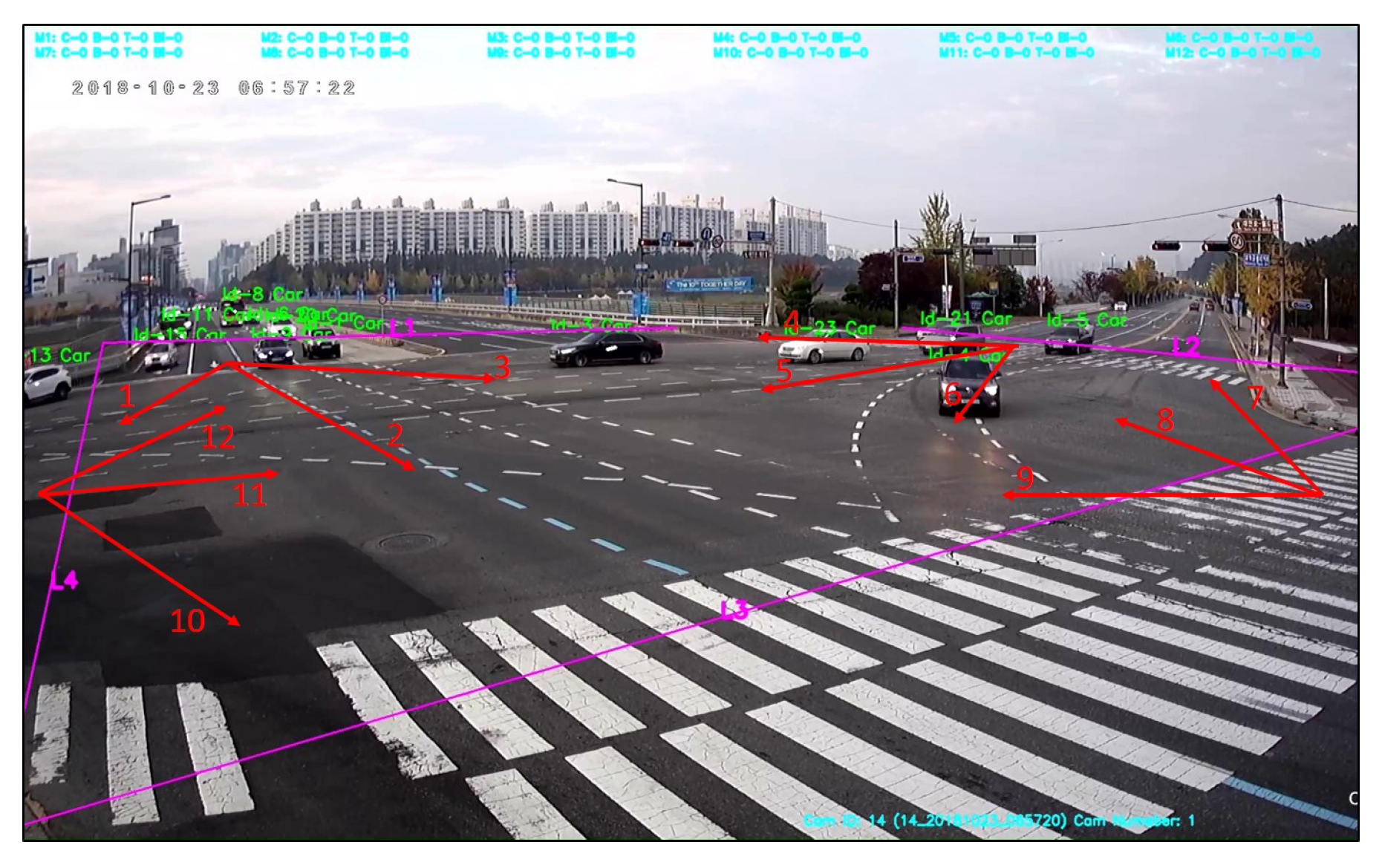
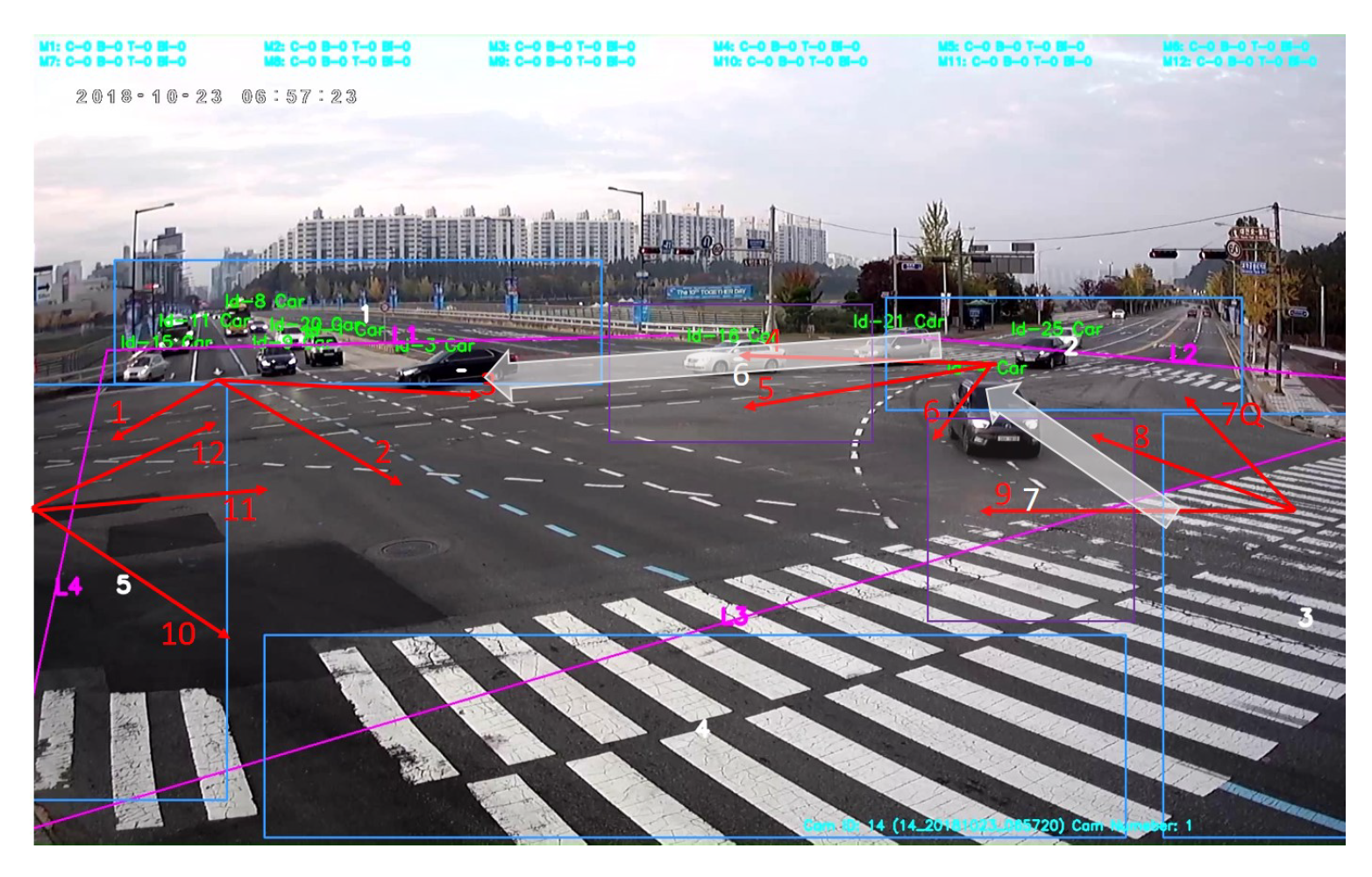
- We collect, pre-process, implement and establish CCTV data at a certain urban area in order to evaluate the proposed framework. Specifically, we focus on complex scenarios in which each intersection covers around 12 movements with a single camera angle that can make the scenarios difficult for monitoring vehicles as shown in Figure 1.
2. Literature Review
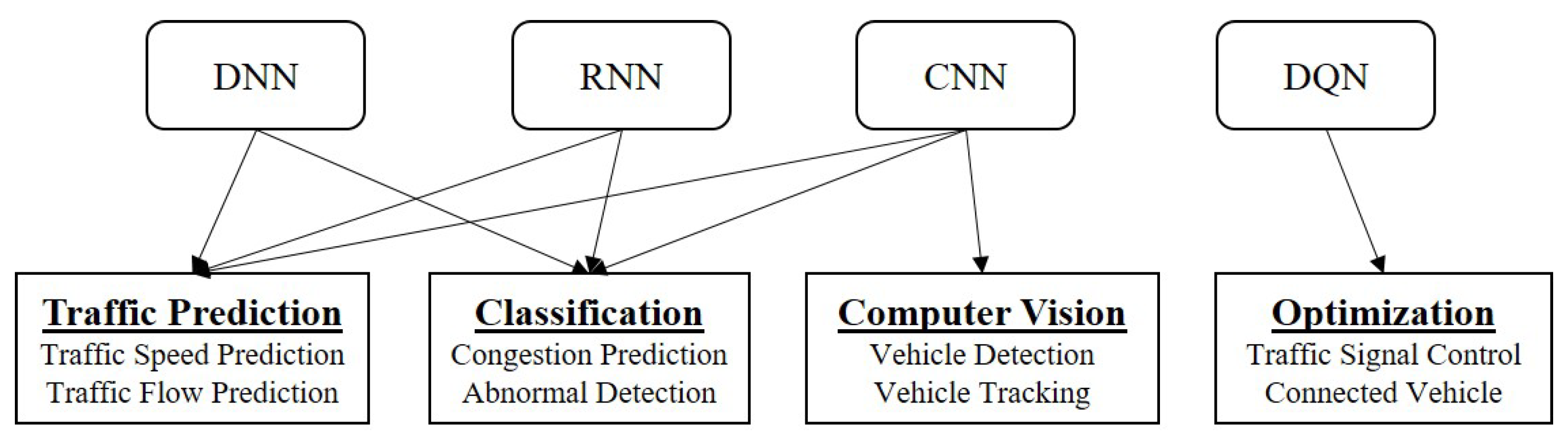
2.1. Traffic Analysis Using Deep Learning
2.2. Moving Object Detection and Tracking Methods
2.3. Vehicle Counting System
- Integrating an effective vehicle tracking method in order to deal with the switch ID problem of vehicle tracking in the case of heavy occlusion and different lighting and weather conditions.
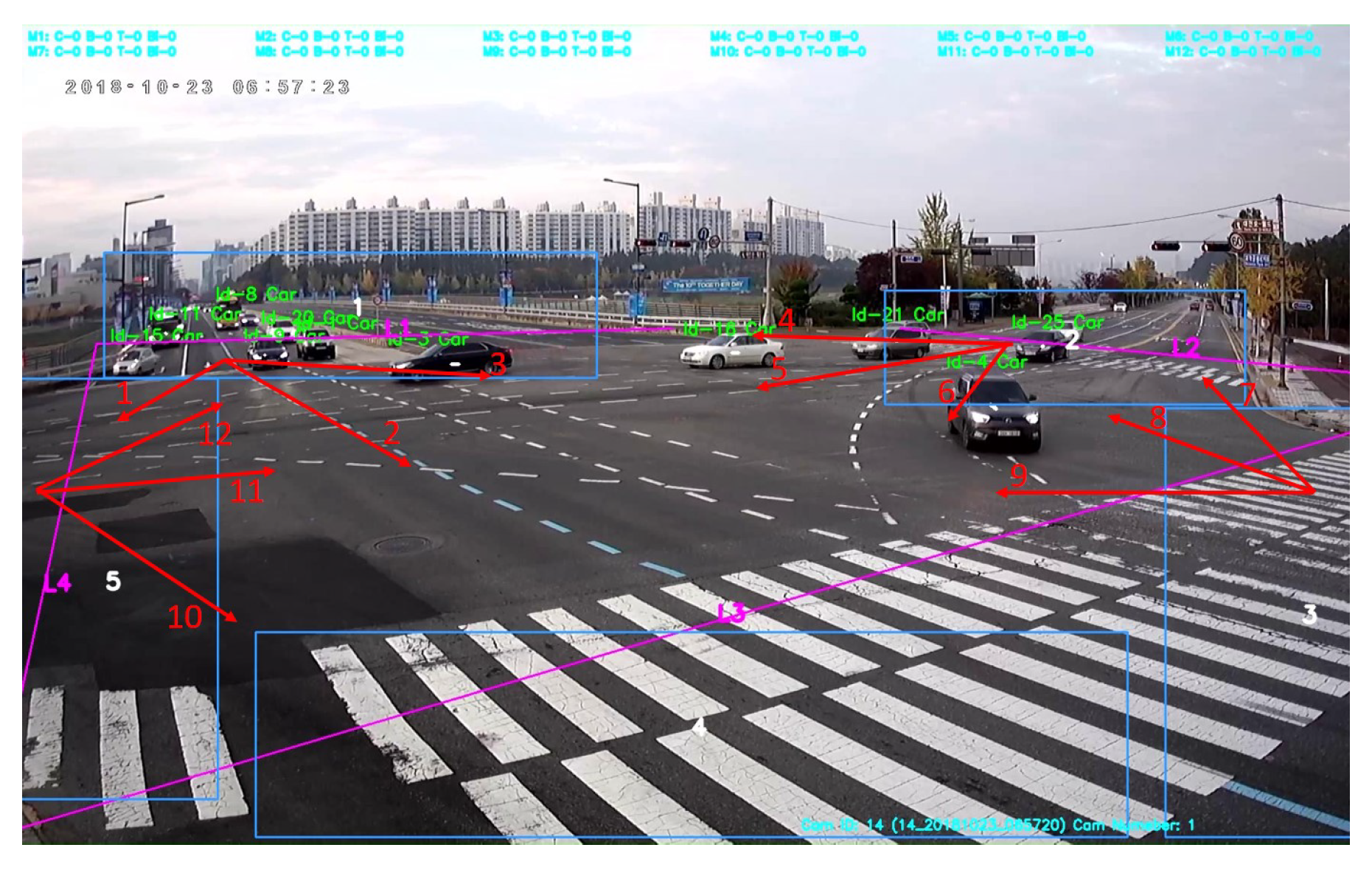
- Proposing a counting method by generating semantic regions to deal with the occlusion problem for monitoring and counting vehicles in complex areas that involve complicated directions (e.g., an intersection with 12 conflicting directions/movements).
3. Video-Based Multi-Class Multi-Movement Vehicle Counting Framework
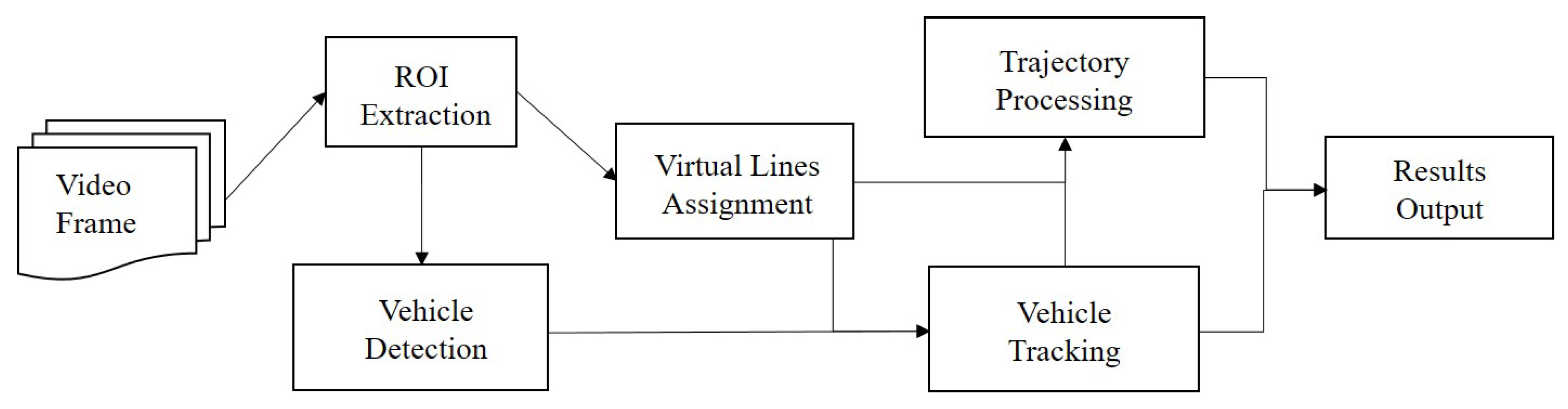
3.1. System Architecture
3.2. Methodology
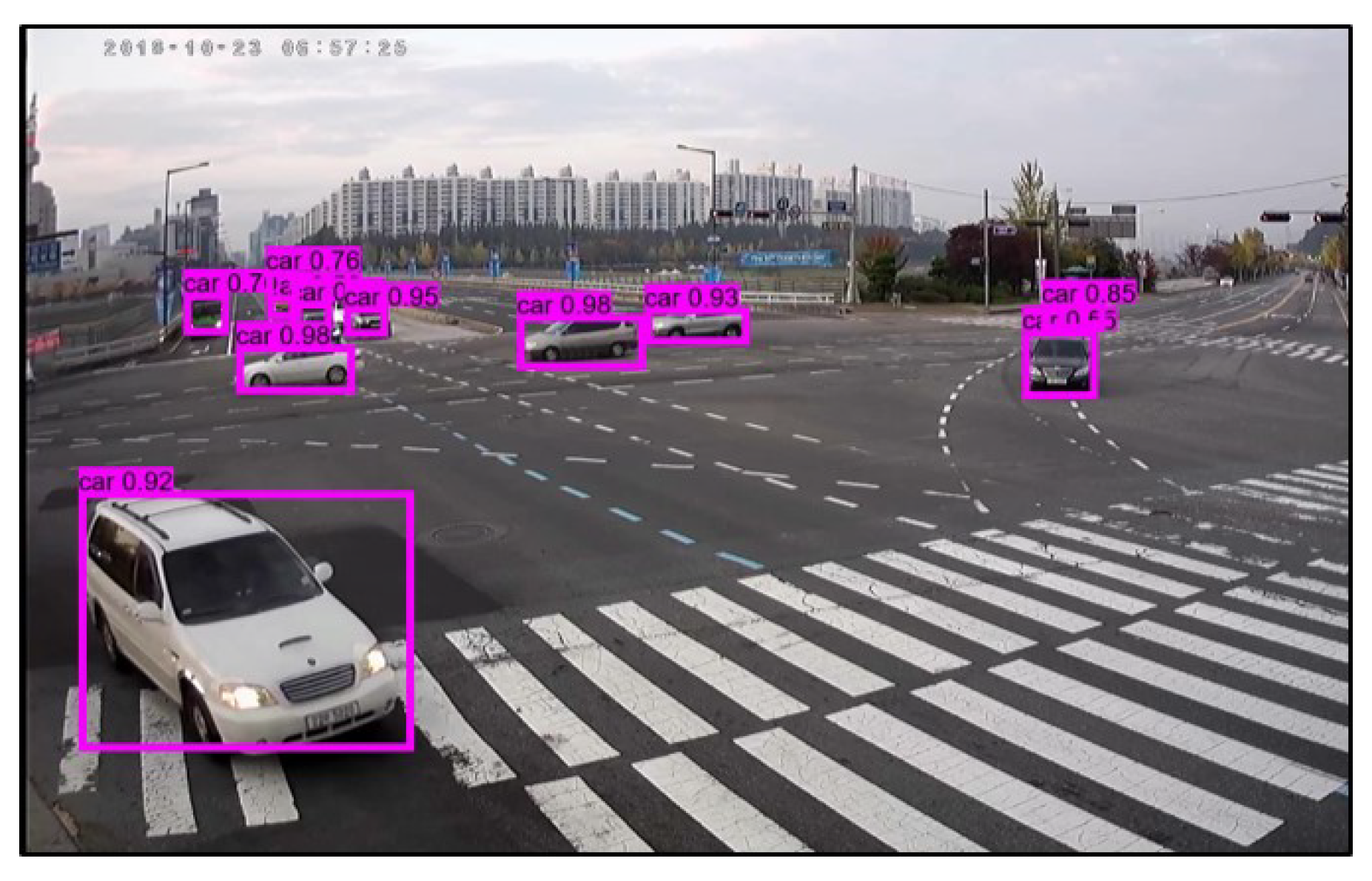
3.2.1. Vehicle Detection
- The method belongs to the single-stage which is able to perform the detection process much faster than two-stage methods.
- Recently, the new version of Yolo (Yolov3) is able to perform the high accuracy of the detection for MOT by conducting 53 convolutional layers, which is able to work well with various dimensions in each frame [41].
- MS-COCO dataset provides the labeling and segmentation of over 80 different classes of objects. In this regard, we are able to detect and track with different types of vehicles such as Car, Bus, Truck, and Bike [42].
- The of the detected object belongs to the type of vehicles such as a car, bus, truck, and bike.
- The of the detected object is larger than a certain threshold.
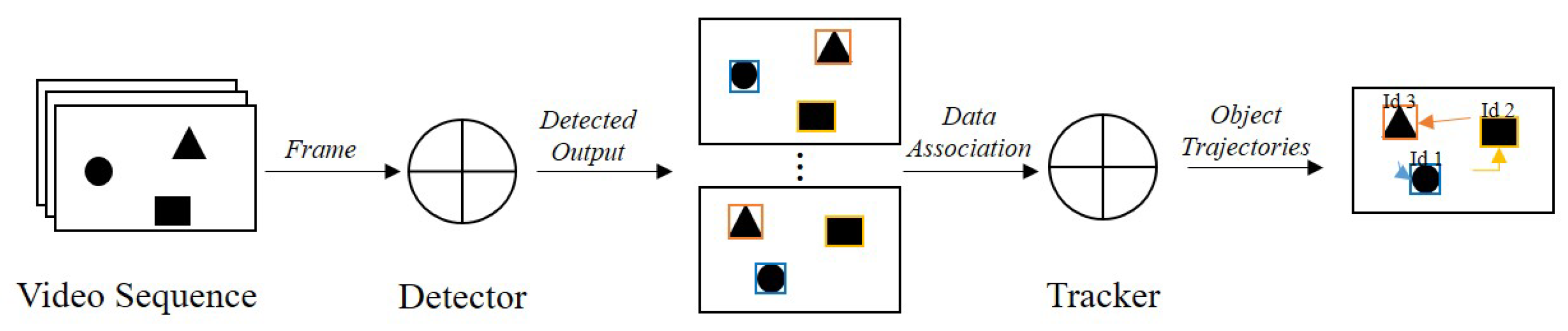
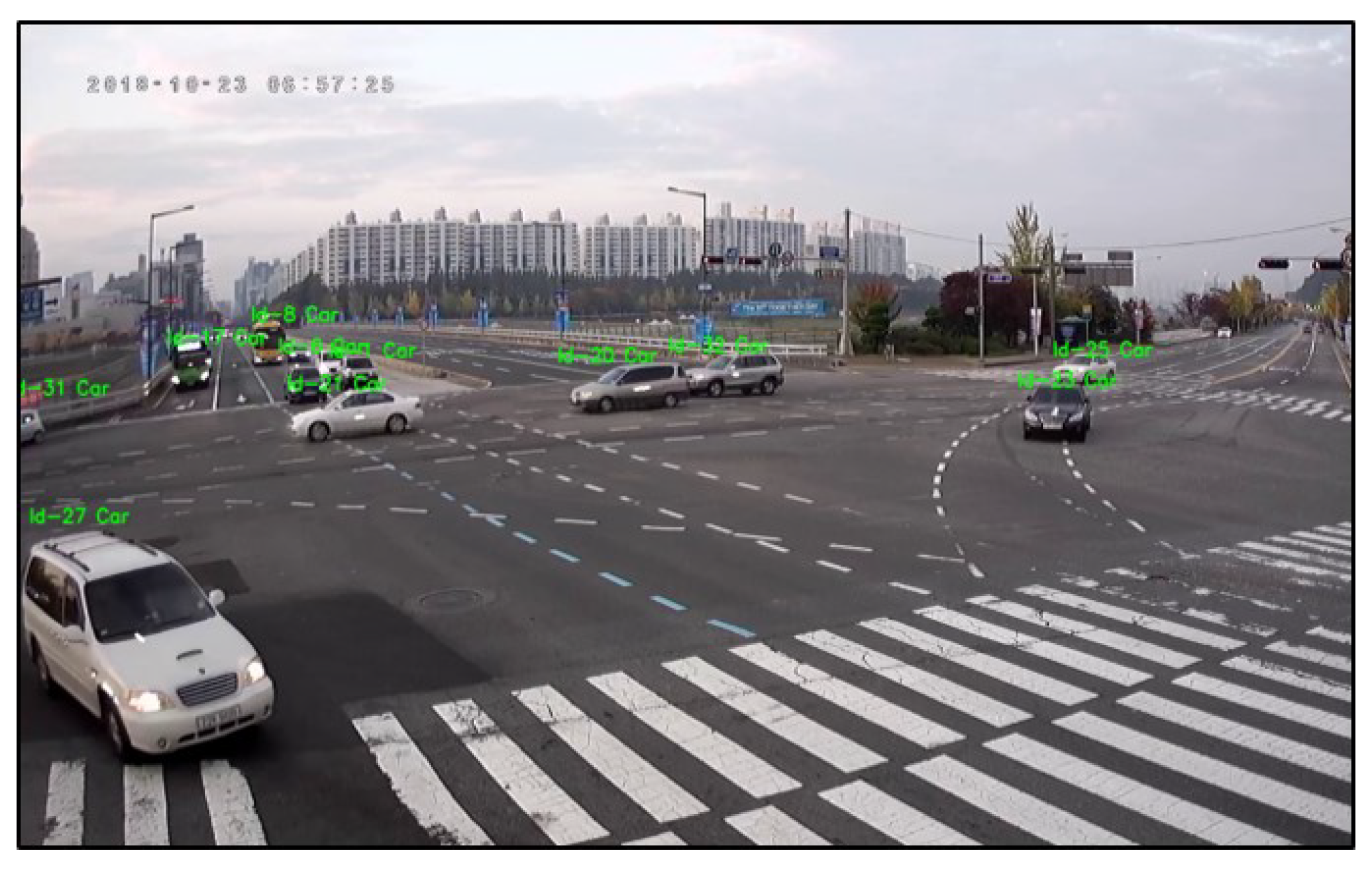
3.2.2. Vehicle Tracking
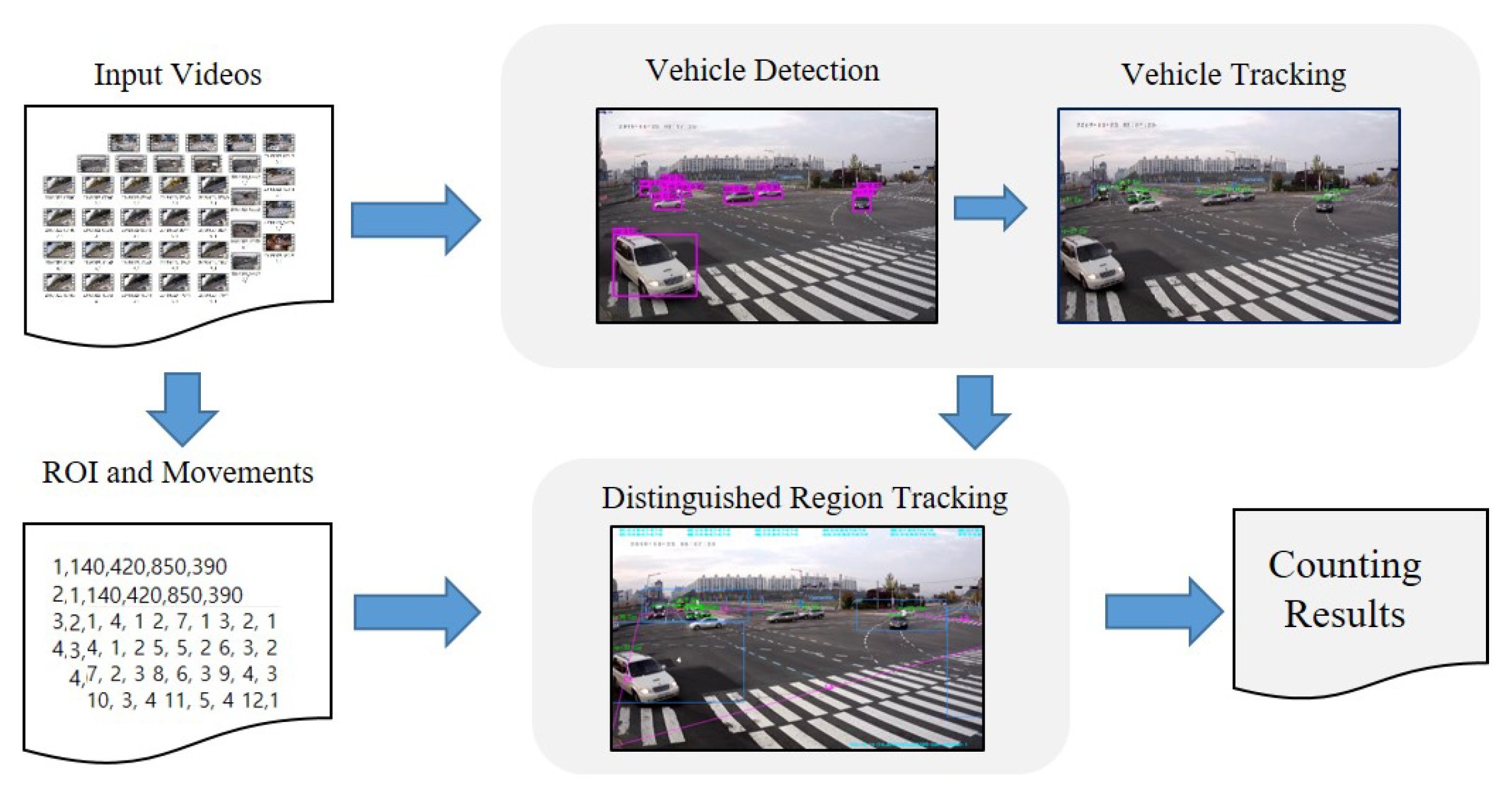
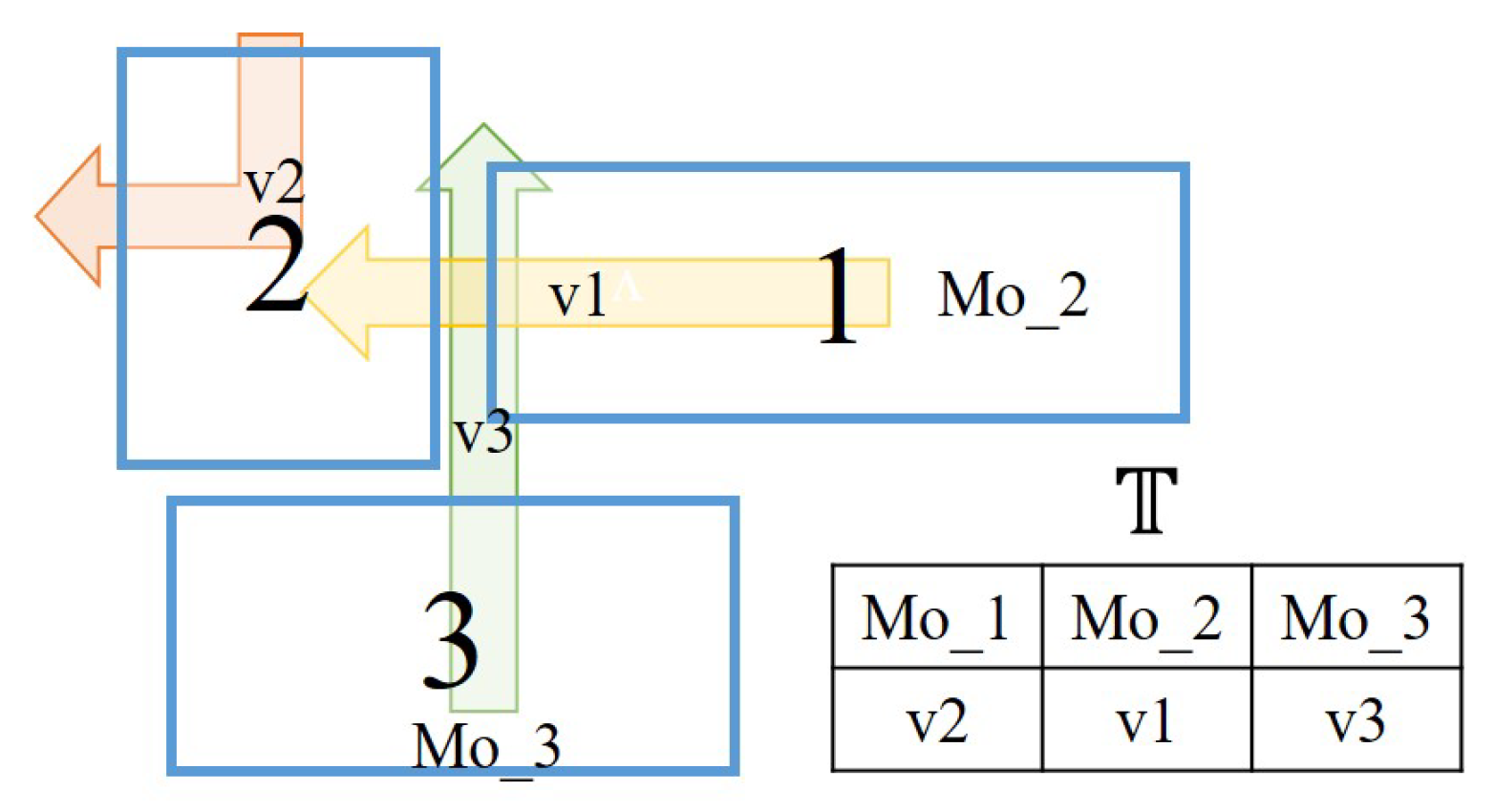
3.2.3. Distinguished Region Tracking-Based Vehicle Counting
| Algorithm 1: MCMM vehicle counting using virtual lines. |
 |
- Reducing the range of tracking.
- Avoiding occlusion in the case of multiple vehicle passing at the same time.
| Algorithm 2: MCMM Vehicle Counting using Distinguished Regions. |
 |
4. Experiment
4.1. Data Description and Experiment Setup
4.2. Experiment Results
4.2.1. Counting Performance
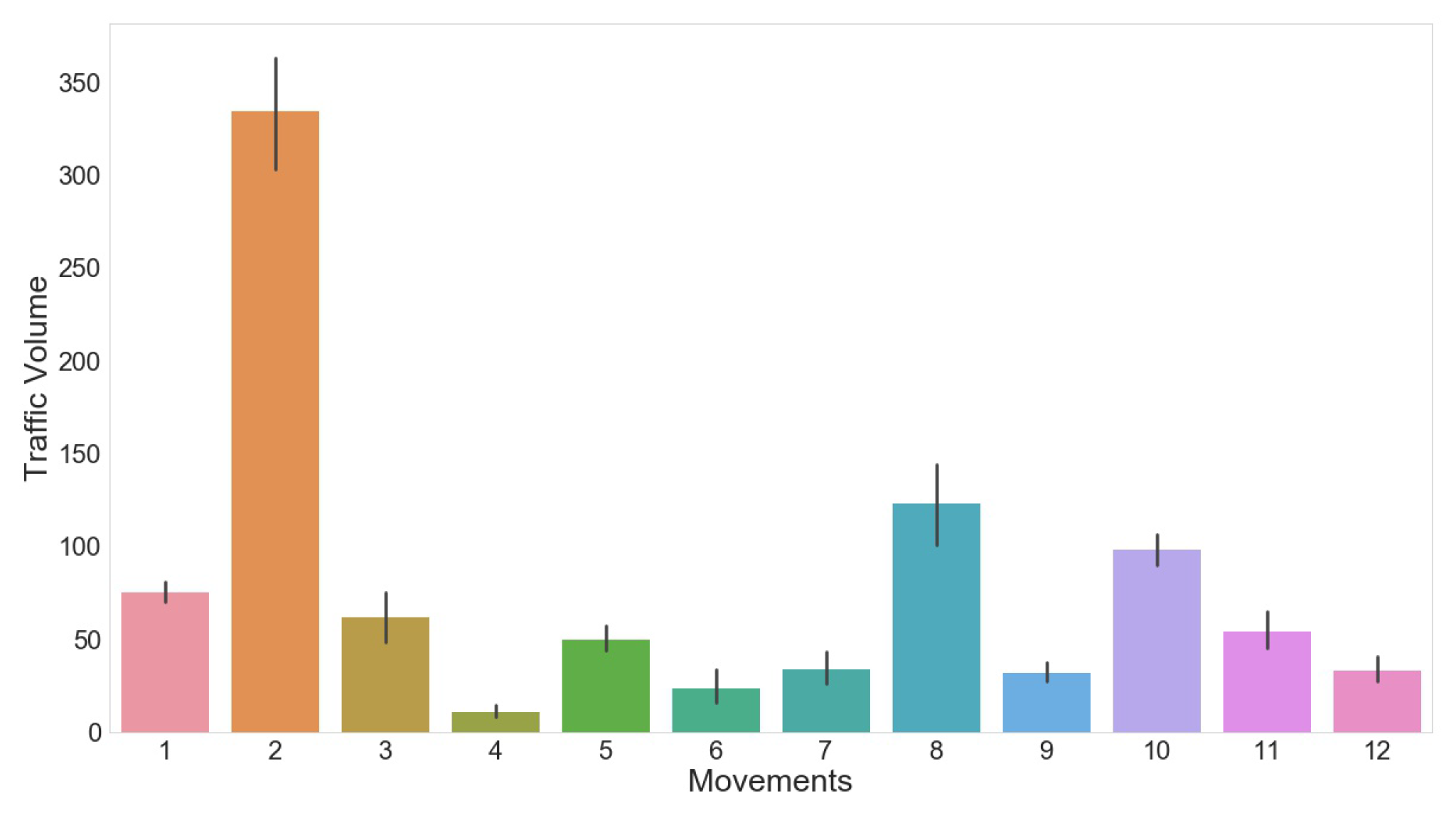
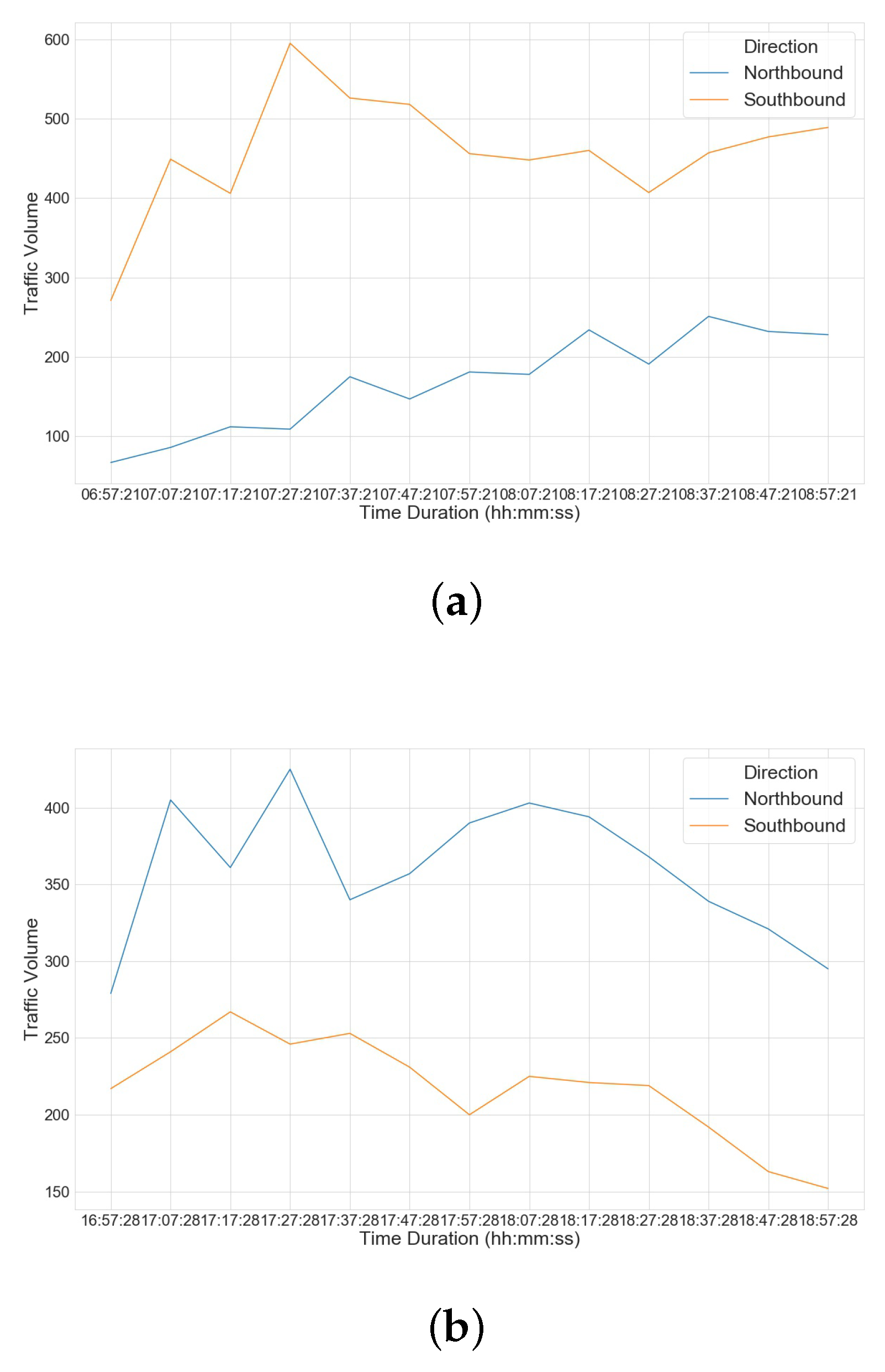
4.2.2. Traffic Analysis Based on Counting Results
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Bui, K.H.N.; Lee, O.; Jung, J.J.; Camacho, D. Dynamic Traffic Light Control System Based on Process Synchronization Among Connected Vehicles. In Proceedings of the 7th International Symposium on Ambient Intelligence (ISAmI), Seville, Spain, 1–3 June 2016; pp. 77–85. [Google Scholar] [CrossRef]
- Fedorov, A.; Nikolskaia, K.; Ivanov, S.; Shepelev, V.; Minbaleev, A. Traffic flow estimation with data from a video surveillance camera. J. Big Data 2019, 6, 73. [Google Scholar] [CrossRef]
- Bui, K.H.N.; Cho, S.; Jung, J.J.; Kim, J.; Lee, O.; Na, W. A novel network virtualization based on data analytics in connected environment. J. Ambient Intell. Humaniz. Comput. 2020, 11, 75–86. [Google Scholar] [CrossRef]
- Xia, Y.; Shi, X.; Song, G.; Geng, Q.; Liu, Y. Towards improving quality of video-based vehicle counting method for traffic flow estimation. Signal Process. 2016, 120, 672–681. [Google Scholar] [CrossRef]
- Bui, K.H.N.; Yi, H.; Jung, H.; Cho, J. Video-Based Traffic Flow Analysis for Turning Volume Estimation at Signalized Intersections. In Proceedings of the 12th Asian Conference on Intelligent Information and Database Systems (ACIIDS), Phuket, Thailand, 23–26 March 2020; pp. 152–162. [Google Scholar] [CrossRef]
- Tang, Z.; Wang, G.; Xiao, H.; Zheng, A.; Hwang, J. Single-Camera and Inter-Camera Vehicle Tracking and 3D Speed Estimation Based on Fusion of Visual and Semantic Features. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Salt Lake City, UT, USA, 18–22 June 2018; pp. 108–115. [Google Scholar]
- Zhao, R.; Wang, X. Counting Vehicles from Semantic Regions. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1016–1022. [Google Scholar] [CrossRef]
- Shirazi, M.S.; Morris, B.T. Vision-Based Turning Movement Monitoring: Count, Speed & Waiting Time Estimation. IEEE Intell. Transport. Syst. Mag. 2016, 8, 23–34. [Google Scholar] [CrossRef]
- Zhu, L.; Yu, F.R.; Wang, Y.; Ning, B.; Tang, T. Big Data Analytics in Intelligent Transportation Systems: A Survey. IEEE Trans. Intell. Transp. Syst. 2019, 20, 383–398. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, D.; Liu, Y.; Dai, B.; Lee, L.H. Enhancing transportation systems via deep learning: A survey. Transp. Res. Part C Emerg. Technol. 2019, 99, 144–163. [Google Scholar] [CrossRef]
- Brunetti, A.; Buongiorno, D.; Trotta, G.F.; Bevilacqua, V. Computer vision and deep learning techniques for pedestrian detection and tracking: A survey. Neurocomputing 2018, 300, 17–33. [Google Scholar] [CrossRef]
- Datondji, S.R.E.; Dupuis, Y.; Subirats, P.; Vasseur, P. A Survey of Vision-Based Traffic Monitoring of Road Intersections. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2681–2698. [Google Scholar] [CrossRef]
- Yi, H.; Bui, K.H.N. VDS Data-Based Deep Learning Approach for Traffic Forecasting Using LSTM Network. In Proceedings of the 19th EPIA Conference on Artificial Intelligence (EPIA), Yogyakarta, Indonesia, 8–11 April 2019; pp. 547–558. [Google Scholar] [CrossRef]
- Yi, H.; Bui, K.H.N.; Jung, H. Implementing A Deep Learning Framework for Short Term Traffic Flow Prediction. In Proceedings of the 9th International Conference on Web Intelligence, Mining and Semantics (WIMS), Seoul, Korea, 26–28 June 2019; pp. 7:1–7:8. [Google Scholar] [CrossRef]
- Bui, K.H.N.; Jung, J.E.; Camacho, D. Game theoretic approach on Real-time decision making for IoT-based traffic light control. Concurr. Comput. Pract. Exp. 2017, 29, e4077. [Google Scholar] [CrossRef]
- Bui, K.H.N.; Jung, J.J. Cooperative game-theoretic approach to traffic flow optimization for multiple intersections. Comput. Electr. Eng. 2018, 71, 1012–1024. [Google Scholar] [CrossRef]
- Naphade, M.; Tang, Z.; Chang, M.; Anastasiu, D.C.; Sharma, A.; Chellappa, R.; Wang, S.; Chakraborty, P.; Huang, T.; Hwang, J.; et al. The 2019 AI City Challenge. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Long Beach, CA, USA, 15–21 June 2019; pp. 452–460. [Google Scholar]
- Ciaparrone, G.; Sánchez, F.L.; Tabik, S.; Troiano, L.; Tagliaferri, R.; Herrera, F. Deep learning in video multi-object tracking: A survey. Neurocomputing 2020, 381, 61–88. [Google Scholar] [CrossRef] [Green Version]
- Jiao, L.; Zhang, F.; Liu, F.; Yang, S.; Li, L.; Feng, Z.; Qu, R. A Survey of Deep Learning-Based Object Detection. IEEE Access 2019, 7, 128837–128868. [Google Scholar] [CrossRef]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.E.; Fu, C.; Berg, A.C. SSD: Single Shot MultiBox Detector. In Proceedings of the 14th European Conference on Computer Vision (ECCV), Amsterdam, The Netherlands, 11–14 October 2016; pp. 21–37. [Google Scholar] [CrossRef] [Green Version]
- Redmon, J.; Divvala, S.K.; Girshick, R.B.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the 26th IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 779–788. [Google Scholar] [CrossRef] [Green Version]
- Lin, T.; Goyal, P.; Girshick, R.B.; He, K.; Dollár, P. Focal Loss for Dense Object Detection. In Proceedings of the 2017 IEEE International Conference on Computer Vision(ICCV), Venice, Italy, 22–29 October 2017; pp. 2999–3007. [Google Scholar] [CrossRef] [Green Version]
- Girshick, R.B. Fast R-CNN. In Proceedings of the 2015 IEEE International Conference on Computer Vision(ICCV), Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar] [CrossRef]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R.B. Mask R-CNN. In Proceedings of the 2017 IEEE International Conference on Computer Vision(ICCV), Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar] [CrossRef]
- Dai, J.; Li, Y.; He, K.; Sun, J. R-FCN: Object Detection via Region-based Fully Convolutional Networks. In Proceedings of the 30th Annual Conference on Neural Information Processing Systems (NIPS), Barcelona, Spain, 5–10 December 2016; pp. 379–387. [Google Scholar]
- Zhong, Z.; Yang, Z.; Feng, W.; Wu, W.; Hu, Y.; Liu, C. Decision Controller for Object Tracking With Deep Reinforcement Learning. IEEE Access 2019, 7, 28069–28079. [Google Scholar] [CrossRef]
- Weng, S.; Kuo, C.M.; Tu, S. Video object tracking using adaptive Kalman filter. J. Vis. Commun. Image Represent. 2006, 17, 1190–1208. [Google Scholar] [CrossRef]
- Chang, C.; Ansari, R. Kernel particle filter for visual tracking. IEEE Signal Process. Lett. 2005, 12, 242–245. [Google Scholar] [CrossRef]
- Wojke, N.; Bewley, A.; Paulus, D. Simple online and realtime tracking with a deep association metric. In Proceedings of the 24th International Conference on Image Processing (ICIP ), Beijing, China, 17–20 September 2017; pp. 3645–3649. [Google Scholar] [CrossRef] [Green Version]
- Bewley, A.; Ge, Z.; Ott, L.; Ramos, F.T.; Upcroft, B. Simple online and realtime tracking. In Proceedings of the IEEE International Conference on Image Processing (ICIP), Phoenix, AZ, USA, 25–28 September 2016; pp. 3464–3468. [Google Scholar] [CrossRef] [Green Version]
- Tang, Z.; Naphade, M.; Liu, M.; Yang, X.; Birchfield, S.; Wang, S.; Kumar, R.; Anastasiu, D.C.; Hwang, J. CityFlow: A City-Scale Benchmark for Multi-Target Multi-Camera Vehicle Tracking and Re-Identification. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Long Beach, CA, USA, 16–20 June 2019; IEEE Computer Society: Washington, DC, USA, 2019; pp. 8797–8806. [Google Scholar]
- Zhang, S.; Wu, G.; Costeira, J.P.; Moura, J.M.F. FCN-rLSTM: Deep Spatio-Temporal Neural Networks for Vehicle Counting in City Cameras. In Proceedings of the International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 3687–3696. [Google Scholar] [CrossRef] [Green Version]
- Pizzo, L.D.; Foggia, P.; Greco, A.; Percannella, G.; Vento, M. Counting people by RGB or depth overhead cameras. Pattern Recognit. Lett. 2016, 81, 41–50. [Google Scholar] [CrossRef]
- Kocak, Y.P.; Sevgen, S. Detecting and counting people using real-time directional algorithms implemented by compute unified device architecture. Neurocomputing 2017, 248, 105–111. [Google Scholar] [CrossRef]
- Xiang, X.; Zhai, M.; Lv, N.; El-Saddik, A. Vehicle Counting Based on Vehicle Detection and Tracking from Aerial Videos. Sensors 2018, 18, 2560. [Google Scholar] [CrossRef] [Green Version]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G.R. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the International Conference on Computer Vision (ICCV), Barcelona, Spain, 6–13 November 2011; pp. 2564–2571. [Google Scholar] [CrossRef]
- Song, H.; Liang, H.; Li, H.; Dai, Z.; Yun, X. Vision-based vehicle detection and counting system using deep learning in highway scenes. Eur. Trans. Res. Rev. 2019, 11, 51. [Google Scholar] [CrossRef] [Green Version]
- Dai, Z.; Song, H.; Wang, X.; Fang, Y.; Yun, X.; Zhang, Z.; Li, H. Video-Based Vehicle Counting Framework. IEEE Access 2019, 7, 64460–64470. [Google Scholar] [CrossRef]
- Fei, L.; Zhiyuan, Z.; Rong, J. A video-based real-time adaptive vehicle-counting system for urban roads. PLoS ONE 2017, 12, e0186098. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Z.; Zheng, P.; Xu, S.; Wu, X. Object Detection with Deep Learning: A Review. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 3212–3232. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Lin, T.; Maire, M.; Belongie, S.J.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft COCO: Common Objects in Context. In Proceedings of the 13th European Conference on Computer Vision (ECCV), Zurich, Switzerland, 6–12 September 2014; pp. 740–755. [Google Scholar]
- Liu, X.; Liu, W.; Ma, H.; Fu, H. Large-scale vehicle re-identification in urban surveillance videos. In Proceedings of the International Conference on Multimedia and Expo (ICME), Seattle, WA, USA, 11–15 July 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Zheng, L.; Bie, Z.; Sun, Y.; Wang, J.; Su, C.; Wang, S.; Tian, Q. MARS: A Video Benchmark for Large-Scale Person Re-Identification. In Proceedings of the 14th European Conference on Computer Vision (ECCV), Amsterdam, The Netherlands, 11–14 October 2016; pp. 868–884. [Google Scholar] [CrossRef]
- Wojke, N.; Bewley, A. Deep Cosine Metric Learning for Person Re-identification. In Proceedings of the IEEE Winter Conference on Applications of Computer Vision (WACV), Lake Tahoe, NV, USA, 12–15 March 2018; p. 7. [Google Scholar] [CrossRef] [Green Version]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Values |
|---|---|
| Resolution | 1920 × 1080 |
| Video Duration | 10 min |
| Frame Rate | 30 FPS |
| Confidence Score Threshold | 0.6 |
| Number of Movements | 12 |
| Number of Classes | 04 |
| Image Reshape Training | 128 × 64 |
| Video ID | Time Duration | Condition | Ground Truth | Vehicle Counting | Accuracy |
|---|---|---|---|---|---|
| Vdo 1 | 06:57:21–07:07:21 | Morning | 565 | 516 | 92.47% |
| Vdo 2 | 13:17:21–13:27:21 | Afternoon | 814 | 721 | 88.57% |
| Vdo 3 | 18:37:21–18:47:21 | Night | 952 | 804 | 84.45% |
| Movement ID | Count Car/ Ground Truth | Count Bus/ Ground Truth | Count Truck/ Ground Truth | Count Bike/ Ground Truth | Accuracy |
|---|---|---|---|---|---|
| Mov 1 | 52/64 | 2/3 | 2/1 | 0/0 | 80.88% |
| Mov 2 | 157/165 | 2/6 | 14/8 | 0/1 | 92.77% |
| Mov 3 | 11/8 | 0/3 | 4/4 | 0/0 | 80% |
| Mov 4 | 2/3 | 2/2 | 0/0 | 0/0 | 80% |
| Mov 5 | 34/30 | 0/2 | 1/1 | 0/2 | 88.57% |
| Mov 6 | 26/25 | 0/1 | 0/1 | 0/0 | 92.59% |
| Mov 7 | 8/9 | 0/0 | 1/0 | 0/0 | 88.89% |
| Mov 8 | 43/52 | 4/6 | 4/5 | 1/1 | 81.25% |
| Mov 9 | 21/21 | 1/2 | 5/4 | 0/0 | 96.29% |
| Mov 10 | 61/61 | 0/0 | 9/8 | 1/2 | 98.59% |
| Mov 11 | 23/28 | 0/1 | 9/9 | 0/0 | 84.21% |
| Mov 12 | 13/16 | 0/0 | 3/3 | 0/0 | 84.21% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bui, K.-H.N.; Yi, H.; Cho, J. A Multi-Class Multi-Movement Vehicle Counting Framework for Traffic Analysis in Complex Areas Using CCTV Systems. Energies 2020, 13, 2036. https://doi.org/10.3390/en13082036
Bui K-HN, Yi H, Cho J. A Multi-Class Multi-Movement Vehicle Counting Framework for Traffic Analysis in Complex Areas Using CCTV Systems. Energies. 2020; 13(8):2036. https://doi.org/10.3390/en13082036
Chicago/Turabian StyleBui, Khac-Hoai Nam, Hongsuk Yi, and Jiho Cho. 2020. "A Multi-Class Multi-Movement Vehicle Counting Framework for Traffic Analysis in Complex Areas Using CCTV Systems" Energies 13, no. 8: 2036. https://doi.org/10.3390/en13082036
APA StyleBui, K. -H. N., Yi, H., & Cho, J. (2020). A Multi-Class Multi-Movement Vehicle Counting Framework for Traffic Analysis in Complex Areas Using CCTV Systems. Energies, 13(8), 2036. https://doi.org/10.3390/en13082036