1. Introduction
The electrical Power System (PS) is one of the most complex networks in the world; it is an interconnected grid established by generation units, substations, transmission, distribution lines, and loads. The diagnosis of failures in electrical power systems through Signal Processing (SP) is applied to the Power Quality (PQ) associated with the implementation of Smart Grid (SG) technologies. The increasing complexity of the electric grid requires signal processing in order to characterize, identify, and diagnose the system behavior accurately [
1,
2].
The detection of an event, in electrical power systems, is the basis for carrying out numerous applications in the safety, power quality monitoring, analysis, and control systems fields. It is important to say that the device which is going to be on charge of detecting and evaluating the events that present any type of disturbance or distortion in a electrical system, must be as thorough as possible when evaluating an anomaly in the system, since a poor performance of this device can result in a false alarms on events that are not important [
3]. This aim most of the time is not achieved due to the fact that the processed data are so big that the equipment is not able to react on time. As can be seen in
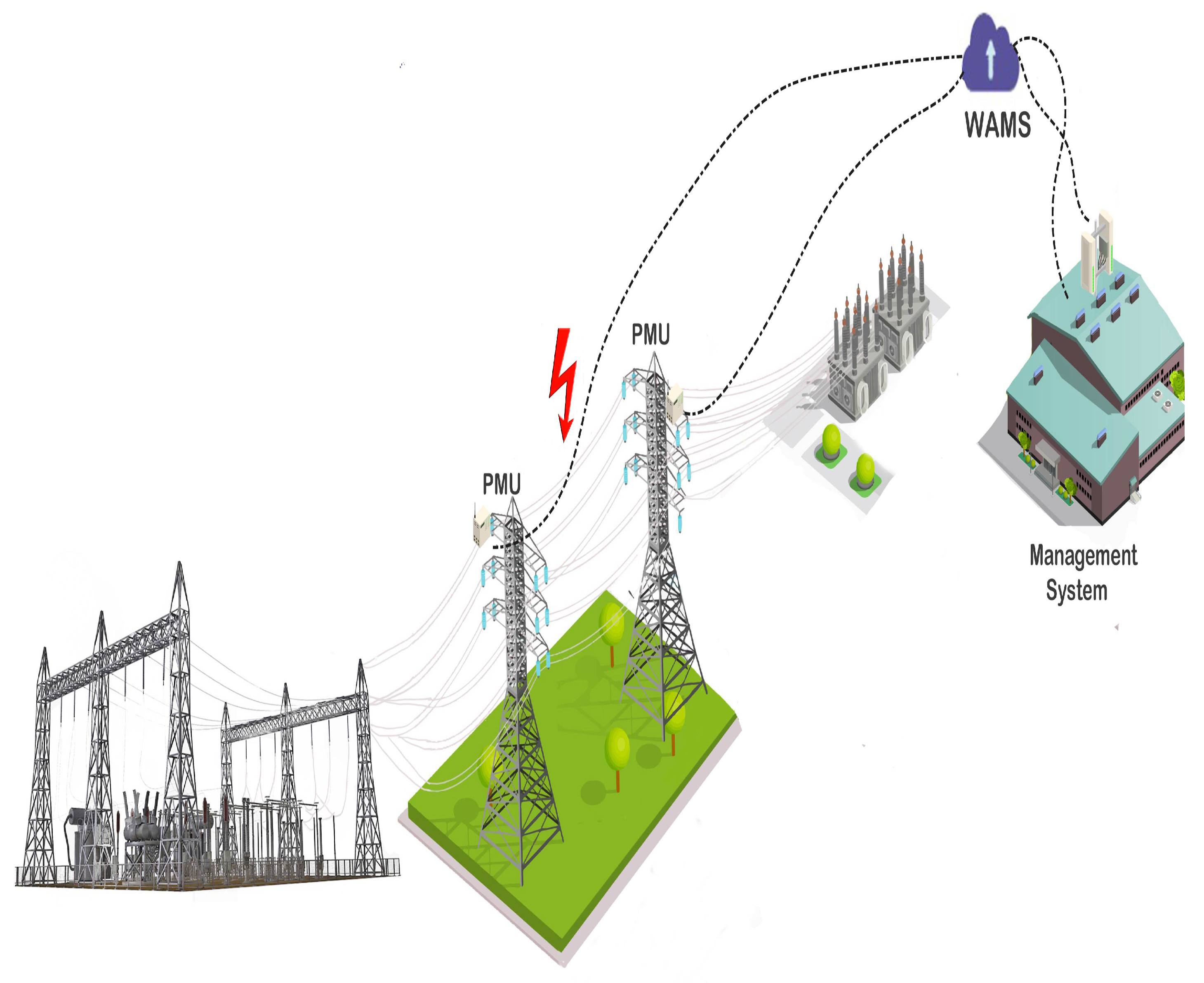
Figure 1, currently, the process to transform analog signals to digital signals is carried out by several secondary smart digital devices knows as Phasor Measurement Unit (PMU) that perform the task of controlling, metering, protecting, supervising, and communicating with other modules of the system. The large amount of data that is acquired by sensors installed in the different points of the electricity network consume large amounts of energy, which is necessary to process information as a consequence of the large volume of data traffic [
4].
The quality of smart devices is determined by their ability to perform Digital Signal Processing (DSP) using mathematics, algorithms, and techniques to manipulate signals [
5,
6]. Lets suppose that a it is intended to monitor the energy quality of our system, here there are several elements that are part in the monitoring and measurement process; however, definitively one of the most important is the device that is in charge of detecting the failures of the electrical network. This multifunctional element is available to record real-time events that will be used for future analysis, it also can classify the elements according to their characteristics. In the first case, if a false alarm occurs in the presence of a minor event, this could lead that irrelevant information could saturate the memory space. On the other hand, if the device is not precise enough, an important event could not be detected and the information would simply be lost. As a result of these two scenarios, a new theory known as compressed sensing is applied with the aim of reducing information by cutting the number of samples required to reconstruct the original data. Therefore, using the same idea, the proposal is to minimize the amount of data required to rebuild the original signal needed to recognize and classify a fault or non-fault detection of any device [
7].
Recently, particularly high interest has been seen in signal processing, especially how to sample and compress these signals. Because of the desire to process the signal and in particular achieve a higher quality of the acquired signal and obtain a high performance in data compression, some models have been developed that propose that a signal considered dispersed can be efficiently represented or reconstructed from a small set of measurements [
8]. The lower number of the sample frequency of the signal is directly related to the decrease in energy consumption and especially the optimization of computational time to process that signal. It is important to say that, due to the advantages of this methodology, it has a very wide application range, especially in devices that have low resolution or in equipment that requires extremely high sampling frequencies.
There are several techniques that can be used for signal reconstruction, but this article will focus on the most relevant, compressed sensing [
9]. The main aim of this methodology is that any type of signal can be represented approximated by a sparse signal; that is to say, an input signal can be characterized by a linear combination composed of its most significant terms. Thus, it can be said that compressed sensing is a promising technology, which will contribute to the significant development of the way in which signal processing is currently performed, reducing computational costs and thus optimizing the use of other resources such as energy [
10]. Compressed sensing is a versatile tool, which can be applied in several situations. For instance, one case is a small sample set that is a direct consequence of the lack of physical availability. A second case is a study in which the large amount of information collected does not allow the fast processing of such information, and it needs to be reduced to its most significant samples without compromising all the information. In addition, a third case is that the access to the amount of data collected is affected or prohibited by the presence of noise.
Lately, numerous studies have been developed on sparse signal reconstruction, for example a complete analysis of a the orthogonal matching pursuit algorithm technique was presented in [
11]. It is an alternative and optimized approach initially posed by the Nyquist–Shannon theorem and based on the fact that a small number of non-adaptive linear projections on a compressible signal contains enough information to rebuild and process it. However, this approach was done for an audio signal. Both Chretien [
12] and Tropp [
13] provided an extensive and comprehensive report about matching pursuit. The first one used MP to decompose a signal in a linear expansion of waveforms that were selected from a redundant dictionary of functions, which was simply the resulting matrix after applying a transform to the input signal. In this paper, the transform was based on the Gabor function that defines an adaptive time-frequency transform. The second one used alternative methods for the lo-norm. The difference is due to its discrete and discontinuous nature; this theorem does not satisfy all mathematical axioms, since it is simply not a norm. This theorem is based on the total number of nonzero elements in a vector. There are also authors who complement compressed sensing with probabilistic techniques, such as the Bayesian approach. It can be seen as an extension of propositional logic that allows reasoning with propositions whose truthfulness or falseness are uncertain [
14].
In contrast, this paper integrates all the basic considerations used by utilities to obtain the best option to reconstruct a sparse signal. It is known that electricity demand is rising, and it is a priority to find new solutions that allow reducing the maintenance and operation costs of the electrical system in a safe and reliable way. Set in this context, fault detection in an electrical system and processing the signal are extremely important in order to meet this objective. Consequently, the proposed algorithm analyzes several methodologies in which a fault signal can be reconstructed, from a few samples, to obtain an accurate selection to process that signal. Additionally, the methodology suggested in this paper can be used in real-life situations and not only as a technical simulation; therefore, the reconstruction of fault signals from a few sampled signals can be useful for academic and practical purposes [
15].
2. Compressed Sensing Theory
The ability to detect an electrical signal, under fault conditions, is widely in electrical systems not only for monitoring the event but also for taking preventive actions in order to protect the system. It extremely important that the system separates the difference between a failure event and an event that does not deserve to be considered as a fault, thus it is possible to select exclusively the events that represent a risk for the system and discard events that present false and unimportant information. This characteristic is extremely important since a false reading of the device will lead, in many cases, in the lack of energy along an electrical line that does not present any error at all. At the moment the device detects a fault, it will be able to classify the fault according to the parameters required and previously pre-established by the user. On the other hand, if the device is not capable of identifying a fault that may be critical to the system, the consequences will be catastrophic not only for the system but also for the consumer, because this would lead to a total blackout.
Compressive sensing is an alternative technique for Shannon/Nyquist sampling [
16], for reconstruction of a sparse signal
that can be well recovered by just
components from an
basis matrix. For this,
x should be sparse, that is to say it must have
k different elements from zero where
. This technique is used to recover a sparse-enough signal from a small number of measurements [
17].
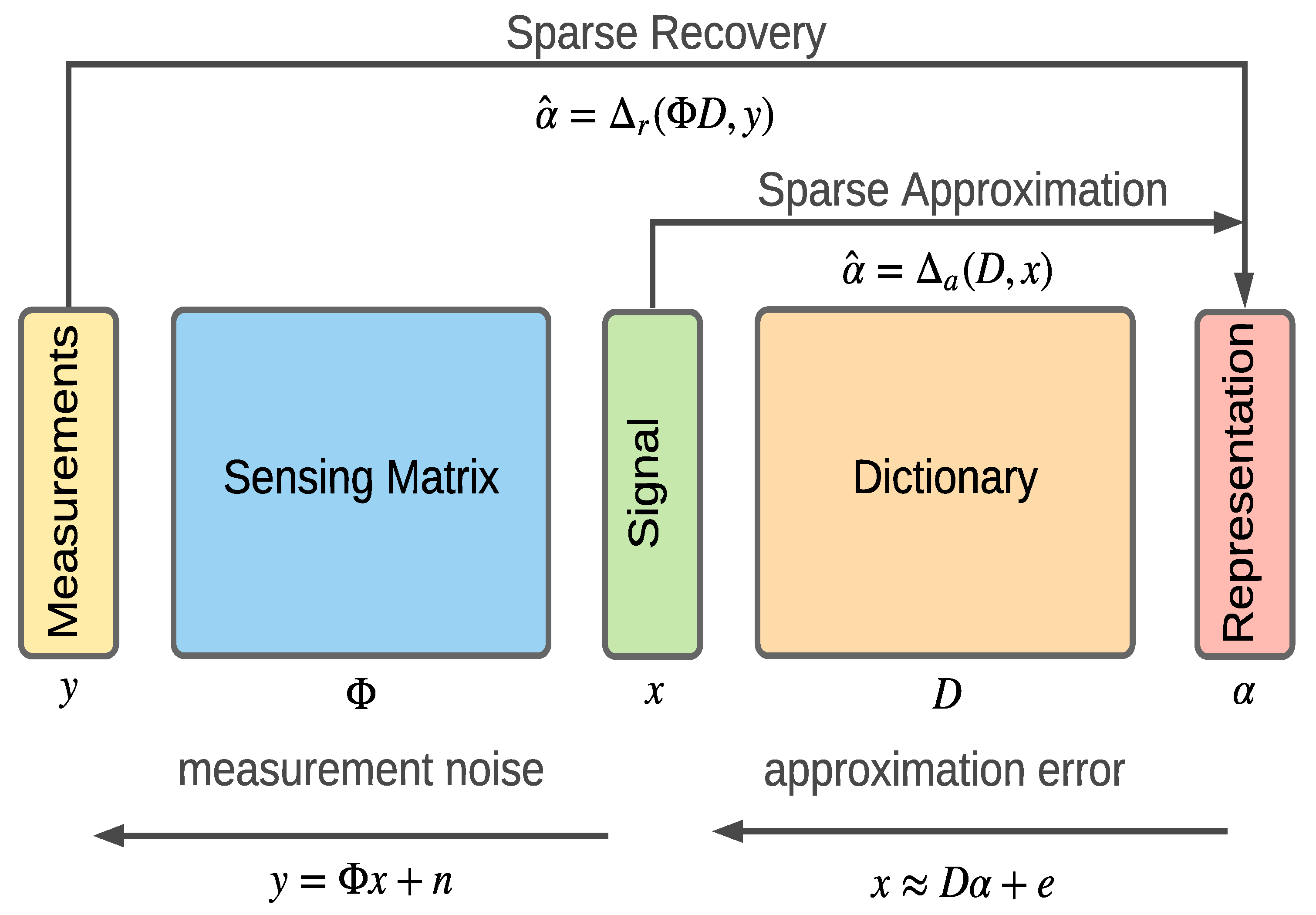
Electrical fault signals have a sparse representation and could be compressed using the framework of sensing shown in
Figure 2. Signals are located in a memory spot called
. The registers can be configured as the signals located there do not have a significant representation within that and thus this infromation representations can have its own memory space
. An algorithm
is able to create a description
for a signal
x in the dictionary
D. There is also an error represented by
e. However, a little quantity of samples is not enough to determinate the information needed by x. The sensing process
create information which can be put together in a vector
for a given signal where the existing noise at the measurement process is
n.
X can be obtained from
y, if we obtain the sparse representation
by using the sparse recovery algorithm
. Finally,
[
17].
The following equation, which is a matrix expression, is a common definition which represent a typical generic sparse acquisition problem.
where:
y is the acquired sample vector of dimension [M × 1];
is the sensing matrix of dimension [M × N];
is the sparse signal representation of dimension [N × 1];
n is the additive noise contribution of dimension [N × 1].
To represent a signal with compressive sensing, it is necessary to obtain the dictionary matrix, D, which may be constructed by different elementary waveforms generated from a variety of basic functions, such as Short-Time Fourier Transform (STFT), Wavelet Transform (WT), Discrete Cosine Transform (DCT), Hilbert Transform (HT), Gabor Transform (GT), the Wigner Distribution Function (WDF), S-Transform (ST), Gabor–Wigner Transform (GWT), Hilbert–Haung Transform (HHT), and hybrid transform based methods.
2.1. Restricted Isometry Property
The incoherence criterion relies on the assumption that the signal x admits a k-sparse representation y in a given sparsifying domain. However, in practice, this knowledge is unavailable a priori. The aforementioned decomposition into a sensing and sparsifying matrix is no longer feasible, and the sensing matrix has to be taken into account as a whole
The best way in which the inconsistency criterion could be explained is that given a dispersion domain, there is a signal x which admits another signal y with a k—dispersed representation. Despite the fact that in practice this knowledge is not well developed, it is known that the information previously described can be decomposed into two matrices: a dispersion matrix and a detection matrix which must be considered in its whole domain.
First a signal x must be assumed which is k-sparse or k-compressible in D and . The aim is to obtain x starting from another signal y considering that and D are values which are already known. The process explined previously can be archived by obtaining the sparse representation from y so later we can calculate .
A bad scenario could be the possibility that k-column submatrices of
are not well conditioned, so there is a chance that some sparse signals get mapped to very similar measurement vectors. Hence, it is not stable to reconstruct the signal mathematically. Furthermore, if any kind of noise or disturbance is present during the process, the veracity of the process decreases even more [
20]. The two authors Candes and Tao describe that due to the nature of a sparse signals, it must be conserved according the action of a sensing matrix. Especially, you have to keep in mind that the space between two sparse signals must be regardless of any disturbances that may exist [
21]. Both authors developed this criteria and represented it in the form of a matrix
where the the smallest number is
for which the following holds:
When
, the Equation (
3) implies that each collection of
k columns from
is non-singular. As it is desire that every collection of 2k columns to be non-singular, the value of
is needed, which is the minimum requirement for the recovery of k sparse signals.
Additionally, if , it is important to notice that the sensing operator very nearly maintains the l2 distance between any two k sparse signals. As a result of this, invert the sensing process stably is possible.
At this point, it is clear the fact that many randomly generated matrices have excellent RIP performance. It is possible to show that if , then with measurements, the probability to recover x is very high.
2.2. Minimum Norm Solution
norm: In the CS context, it is necessary that will be sparse. The solution presented as follow is a commun representation for the solution recovery:
norm: Assuming a matrix A which satisfy RIP criterion, highly sparse solutions can be obtained by convex optimization. In such a way, the algorithm is commonly know as Basis Pursuit (BP): [
22,
23].
The problematic present can be recognise as a recovery problem which can be define as a convex optimization. A efficient solution to this problem will be throughout linear programming techniques using a canonical simplex method or the more recent interior point method.
norm: This method is commonly known as the Least Squares (LS) solution, and it aim is to minimize the residual energy in order to ensure adjust data resulting from measurement [
24].
2.3. Matching Pursuit
This is also an algorithm (Algorithm 1) which develop an sparse approximation in order to obtain the “best matching” projections of multidimensional data onto the span of an over-complete dictionary D. This means that a signal
f cab be represent starting from Hilbert space H approximately as the weighted sum of finitely many functions
(called atoms) taken from D [
25].
| Algorithm 1: Matching Pursuit [17]. |
| Input: Signal: , dictionary D with normalized columns |
| Output: List of coefficients and indices for corresponding atoms |
| Initialization: |
| |
| Repeat: |
| Find with maximum inner product ; |
| ; |
| ; |
| ; |
| Until stopping condition (for example: ) |
| return |
2.4. Orthogonal Matching Pursuit
The aim of this method is to collect enough information to reconstruct a sparse vector
from the process of identify the vector of indices
ȷ composed by
, so that the columns
of
are selected accurately in order to minimize the cardinality of the error
of the signal compressed in the MDMSand the approximation
. In OMP, the amplitude of the atoms most of the time is orthogonal to the residue, this amplitude is named
. Thus the found vector
ȷ consist of the index
. The following equation explains how to solve this problem.
OMP is an ambitious algorithm (Algorithm 2) since it starts by determining the largest atoms of
; and it is also based on matching pursuit. Nevertheless, this work does not expose the characteristics of this algorithm since it was not implemented due to the limitations it contains regarding the increase of the number of iterations [
20,
26,
27].
| Algorithm 2: Orthogonal Matching Pursuit [20]. |
| Input: Measurement matrix A , observed vector y , sparsity k |
| Initialization: |
| |
| for i |
| with maximum inner product ; |
| ; |
| ; |
| ; |
| Until stopping condition (for example: ) |
| return |
2.5. Basis Pursuit
This is another algorithm (Algorithm 3) that can considered as a mathematical optimization problem, the equation which explain this method is presented below.
where
x is an
solution vector which will be the signal,
y is an
vector of observations which represent the measurements,
is an
transform matrix which is usually the measurement matrix, and finally it must to be considered that
. This algorithm is commonly used in scenarios where exist an underdetermined system of linear equations such as
, this equation must to be totally satisfied, and the sparsest solution in the
sense is desired [
28].
| Algorithm 3: Basis Pursuit [28]. |
| Input: |
| Procedure: |
| |
| |
| |
| such that and |
| indices corresponding to the k largest magnitude entries in |
| such that and |
| Output: x and T |
3. Problem Formulation
The fact that a sparse signal can be recovered, with high probability, from a small set of random linear projections using nonlinear reconstruction algorithms, has a high level of applicability within several engineering fields. The signal can be sparse in the time or frequency domain, and the number of random projections used to recover the signal, in general, is much less than the number of samples, allowing reducing the sampling frequency and thus also decreasing the analog-to-digital conversion resources, storage resources, and transmission resources. Not many works have been published on the potential of using this theory; however, algorithms such as matching pursuit, orthogonal matching pursuit, and basis pursuit allow developing practical and implementable applications such as fault detection in a power electrical system.
In the new scenario of smart grids, more signal processing methods for electrical parameters are required to keep the network under control and operate at the desired quality of service and reliability. For this purpose, electrical parameters in terms of voltage, current signals considering the magnitude, phase, and waveforms are studied from a more complex point of view where the new frequency components add higher variations that affect measurement parameters. Moreover, monitoring the all the system parameters at every location requires high performance tools for state estimation of system parameters. As a result, the estimation and further processing of electrical power system parameters become an essential feature of power system analysis [
29].
The complexity of the electrical grid will require not only advanced signal processing that can identify specific parameters, but also intelligent methods that identify the behavioral patterns of the system under fault conditions. There are no previous studies or comparative analyses of how compressed sensing can be used to detect faults in electric power systems [
15,
25].
A dual detection problem can be analyzed by two hypotheses. The first one is related to the assumption that a fault occurs; for instance, a short circuit between two phases of the electrical power system. The second one is associated with the supposition that a fault event does not occur; for example, a system is under normal operation. The statistical properties of the hypotheses are usually very complex or unknown. In order to have a better understanding of the process of the signals in either of these situations, techniques such a compressed sensing can be implemented. Compressed sensing is an alternative technique to Nyquist–Shannon sampling, for reconstruction of a sparse signal that can be well recovered by just components from an basis matrix. For this, x should be sparse, that is to say that it must have k different elements from zero where . This technique is used to recover a sparse-enough signal from a small number of measurements.
The technical and economic aspect is also considered, since it is not possible to install measurement sensors along the entire PS; hence, using the concept of the sparse matrix, in which there will be few points where the measurement equipment can be located, a sparse matrix is created from the measurements obtained along the electrical system. In addition, using the concept of compressed sensing, it is projected to find the points at which to locate the measurement equipment under the optimization criteria.
There are some studies on the behavior of communications networks for the transmission of data obtained from the sensors under the Nyquist–Shannon sampling theory [
27,
30]. According to the information obtained, it has been possible to detect and classify different types of events on transmission lines in electric power systems. First, full access to all the data that arrive at a bus bar due to a fault event has to be assumed. Applying signal processing techniques, a dictionary is found that represents the signal based on the orthonormal bases. The present research focuses on the establishment of the optimal sampling points of the signals under the establishment of the correct dictionary and the use of the
and
standard under the RIP restrictions and compressed sensing.
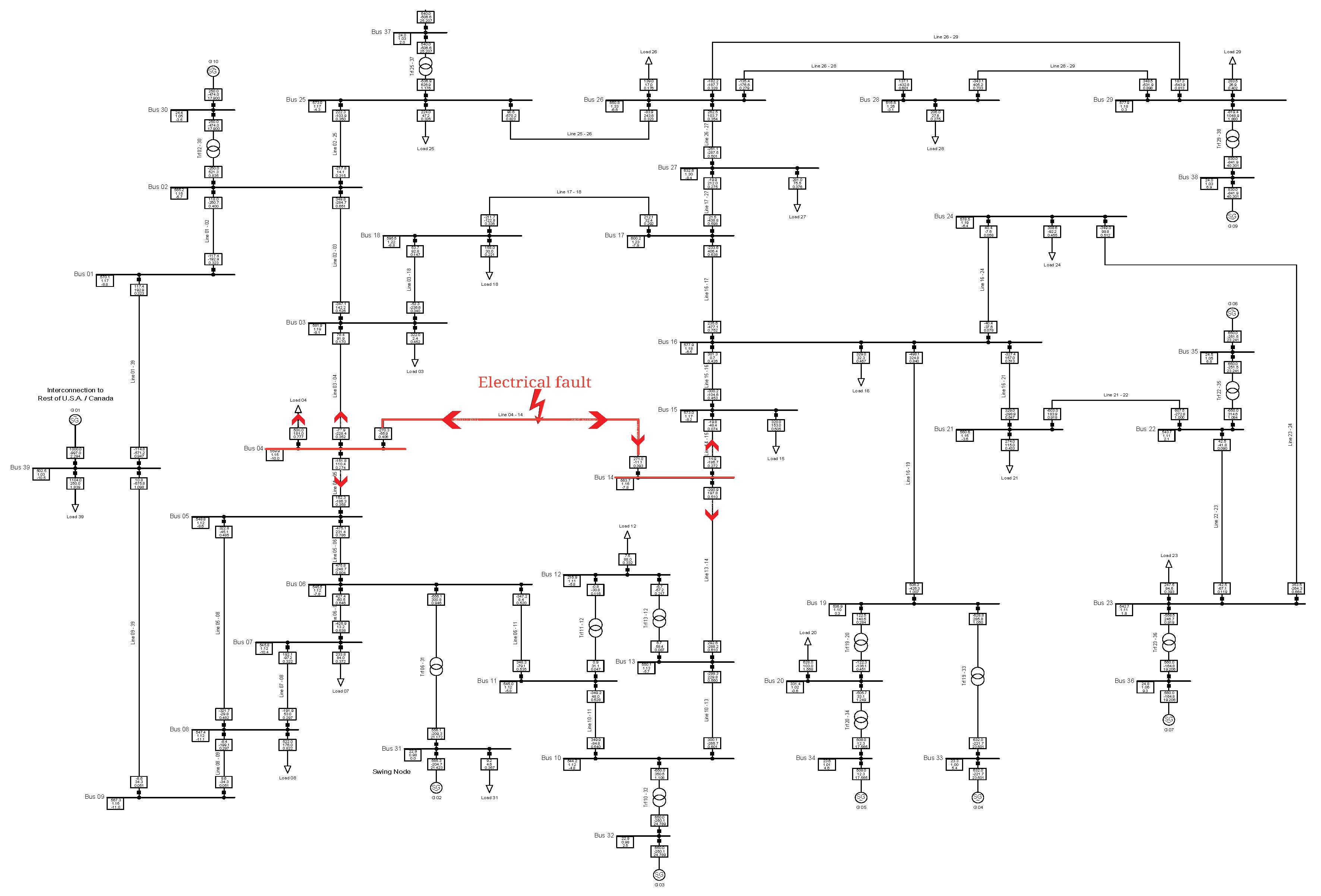
For the present study, the IEEE 39-bar model was taken as a case study. This is a model that shows the arrangement of a transmission line, and it is widely used in the study of electrical flows and fault analysis as well. A fault in a circuit is any event that interferes with the normal flow of current. Most transmission line failures are caused by lightning strikes that result in opening insulators [
31]. The high voltage between a conductor and the grounded tower that supports it causes ionization, which provides a path to the ground for an atmospheric discharge. Additionally, opening the switches, to isolate the failed portion of the line from the rest of the system, interrupts current flow in the ionized path and allows deionization in the circuit [
32]. Generally, in transmission line operation, a re-connection of the switches is highly successful after a fault. In
Figure 3, the red line shows the presence of a fault; this event will generate several post fault voltage and current signals that will be used later as the base of the signal reconstruction. In order to investigate all the possibilities, the 11 types of failures that could occur in transmission lines were simulated; as consequence, it was verified that the results obtained and validated in a three-phase fault included the signals of the remaining 10 types of failures. The three-phase fault produced an electromagnetic phenomena that could be evidenced in the current and voltage signals that were recorded by the PMU at both ends.
4. Analysis and Results
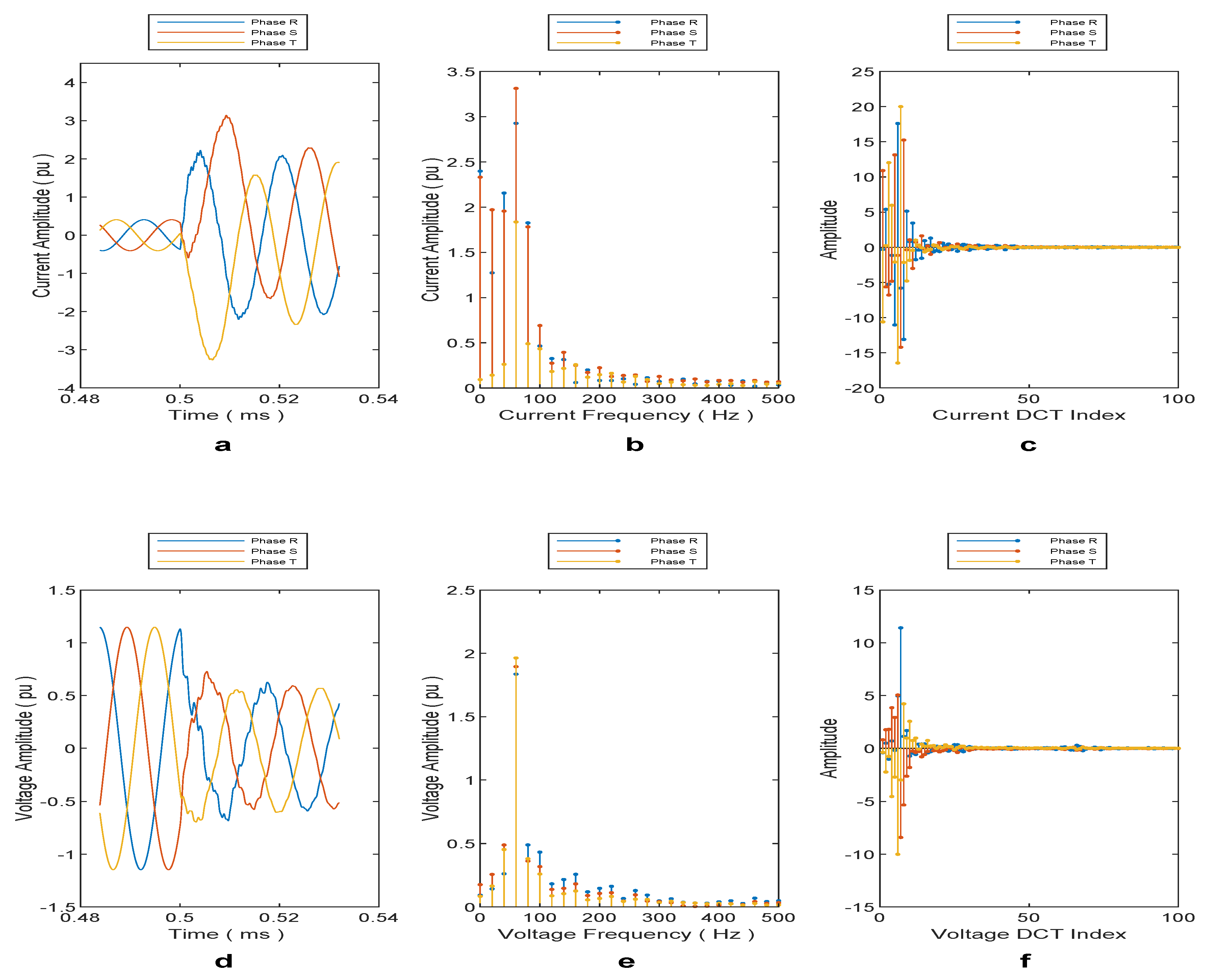
In
Figure 4, top left corner, the three-phase current signals in Bus 4 are shown, presenting that there is a phase and magnitude disturbance. The frequency spectrum that is the result of the electrical fault is shown in
Figure 4, top center. In this figure, the frequency with greater amplitude is the fundamental one of 60 Hz; however, new frequency components have been included due to the electrical failure. In
Figure 4d, the voltage signal presents phase disturbances and a magnitude decrease. The frequency spectrum that is the result of electrical fault is shown in Part e. In this figure, also the frequency with greater amplitude is the fundamental one of 60 Hz; however, new frequency components have been included due to the electrical failure. In Part f, the discrete cosine transform is shown. It can be seen that the energy of the signal is concentrated in a few data, allowing us to create a sparse matrix.
4.1. Matching Pursuit Results
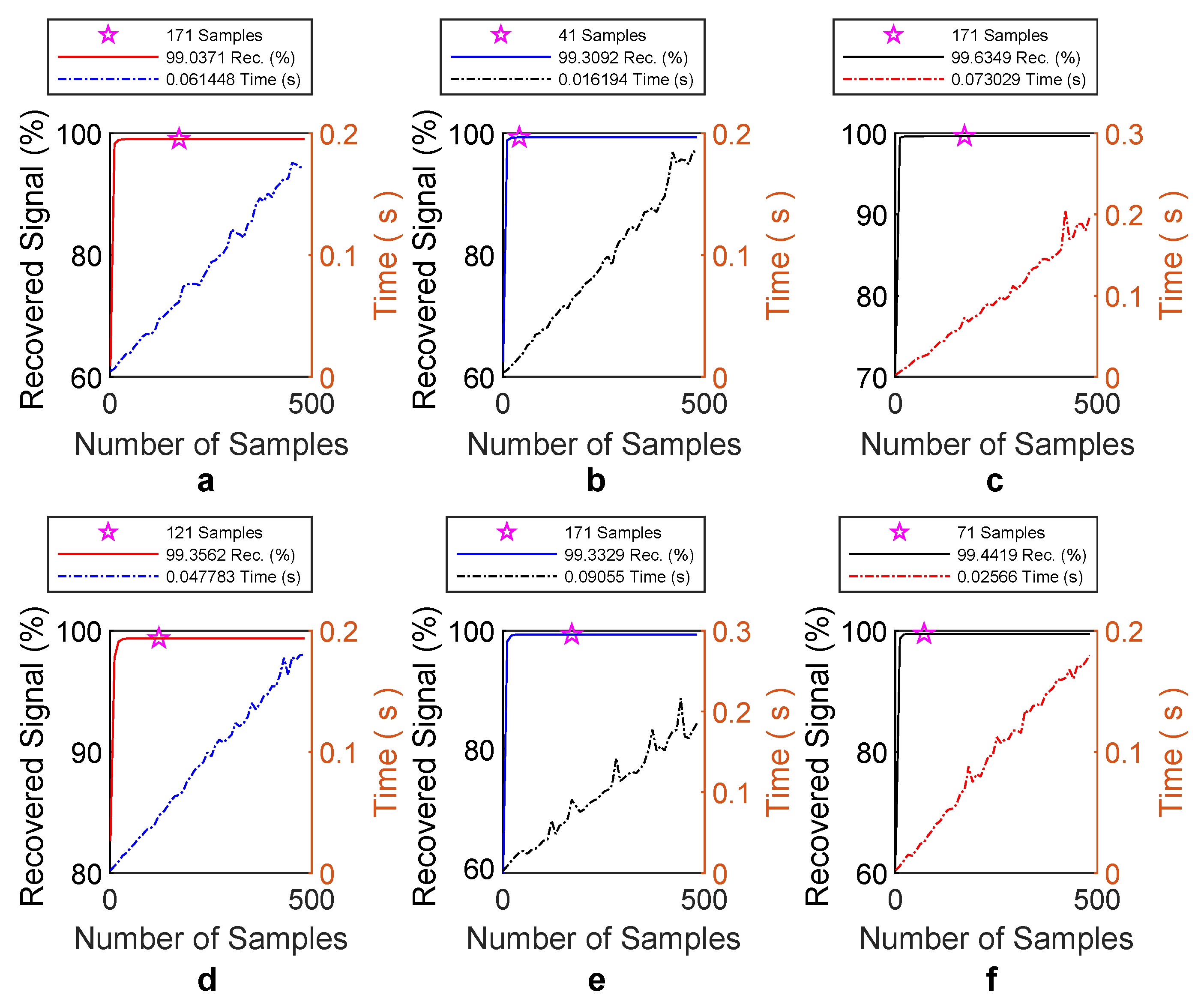
To solve the problem of signal restoration using the matching pursuit model, first, it is necessary to establish the number of atoms in the signal known as k. The atoms of the signal are the minimum number of samples that represent the entire signal.
Figure 5 shows the optimal number k signal atoms of the signal under fault conditions; thus, the number of random samples needed by the atoms is 171 for a fault signal with no noise. As can be seen, the execution time of the algorithm to find the optimal value of k is less than 0.2 s.
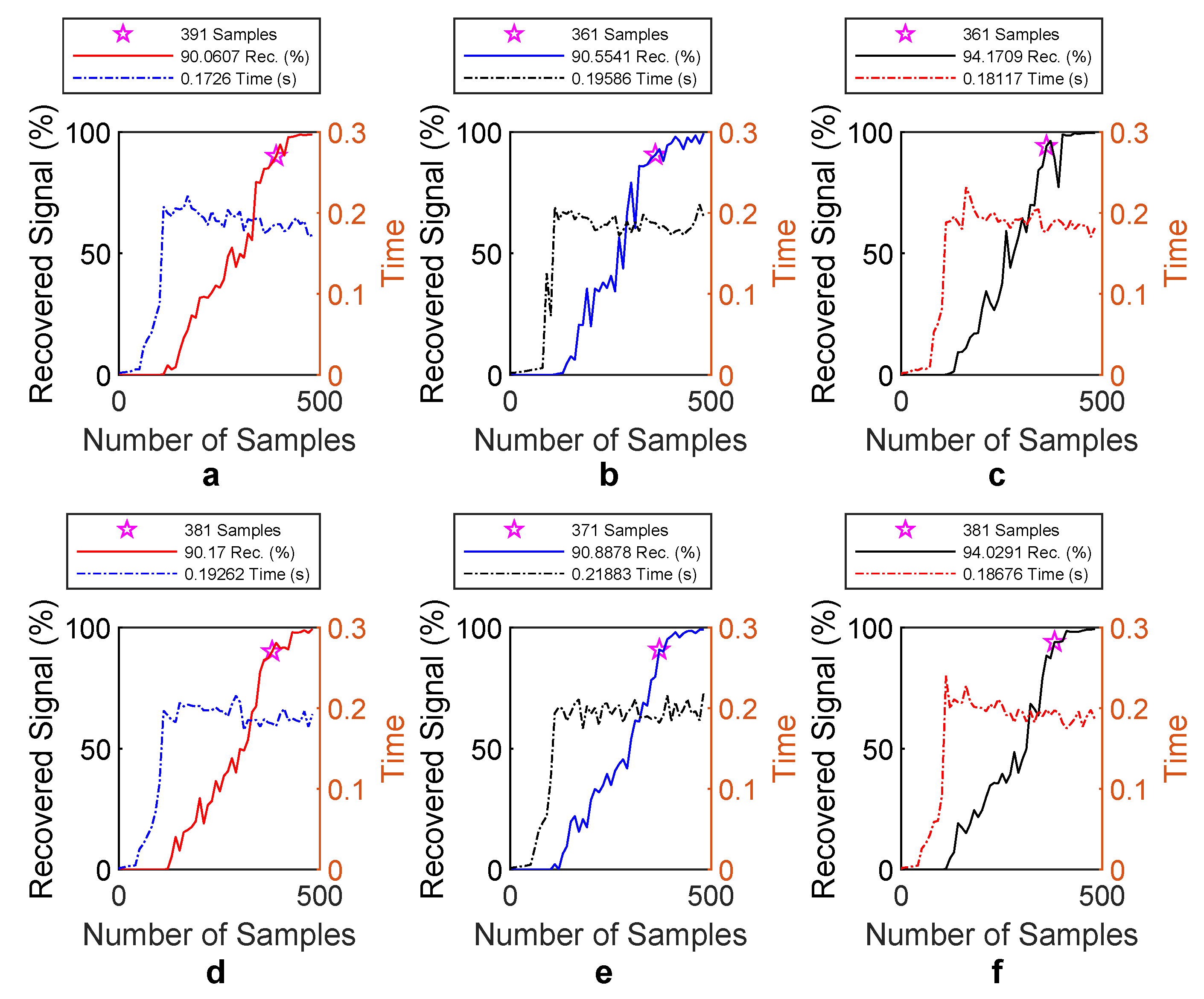
Second, the number of samples needed to reconstruct the signal will be calculated.
Figure 6 shows the number of samples needed to reconstruct 90% of the signal as a function of the original one. The scenario with the highest number is Part a. It requires 391 random samples of the original signal, which is equivalent to 80% of the original signal data, and the machine time required to process the algorithm is 0.1726 s.
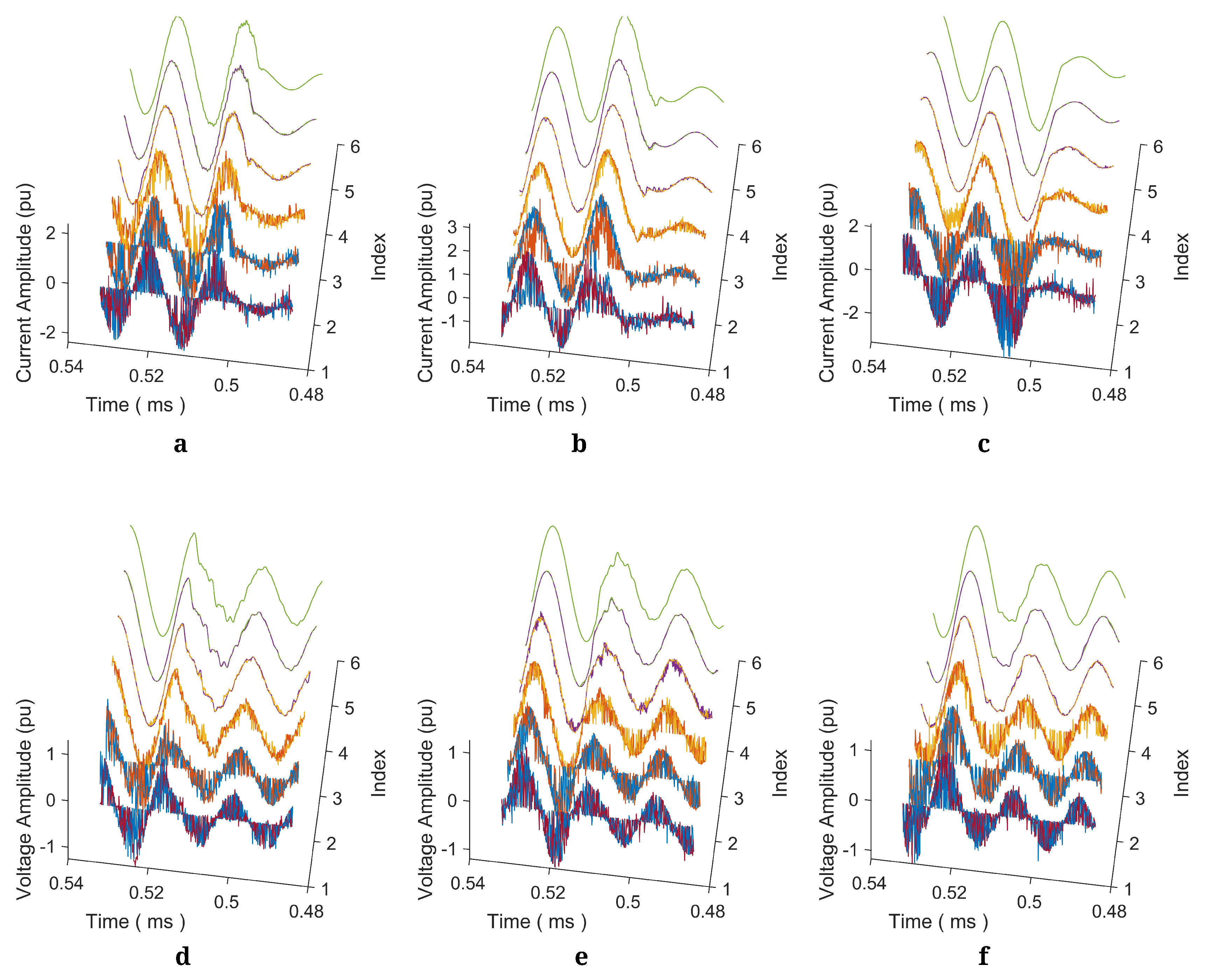
Finally, once the number of samples is calculated, the optimal values in order to reconstruct the signals can be obtained. For this case, k = 171, which corresponds to 35% of the base signal, and m = 391, corresponding to 80% of the same one. Next, the reconstruction tests of the signals produced by the electrical failures are developed at Bar 14.
Figure 7 shows the reconstruction of the signal at a different point in the system based on 50% to 100% random samples; thus, the value of k will be 171. It is important to mention that the reconstructed signals were obtained from 80% of the whole information, where orange signals eliminate the noise that occurs when the samples are spread. The machine time to execute this algorithm in order to find the optimal value k was lower than 0.2 s.
4.2. Orthogonal Matching Pursuit Results
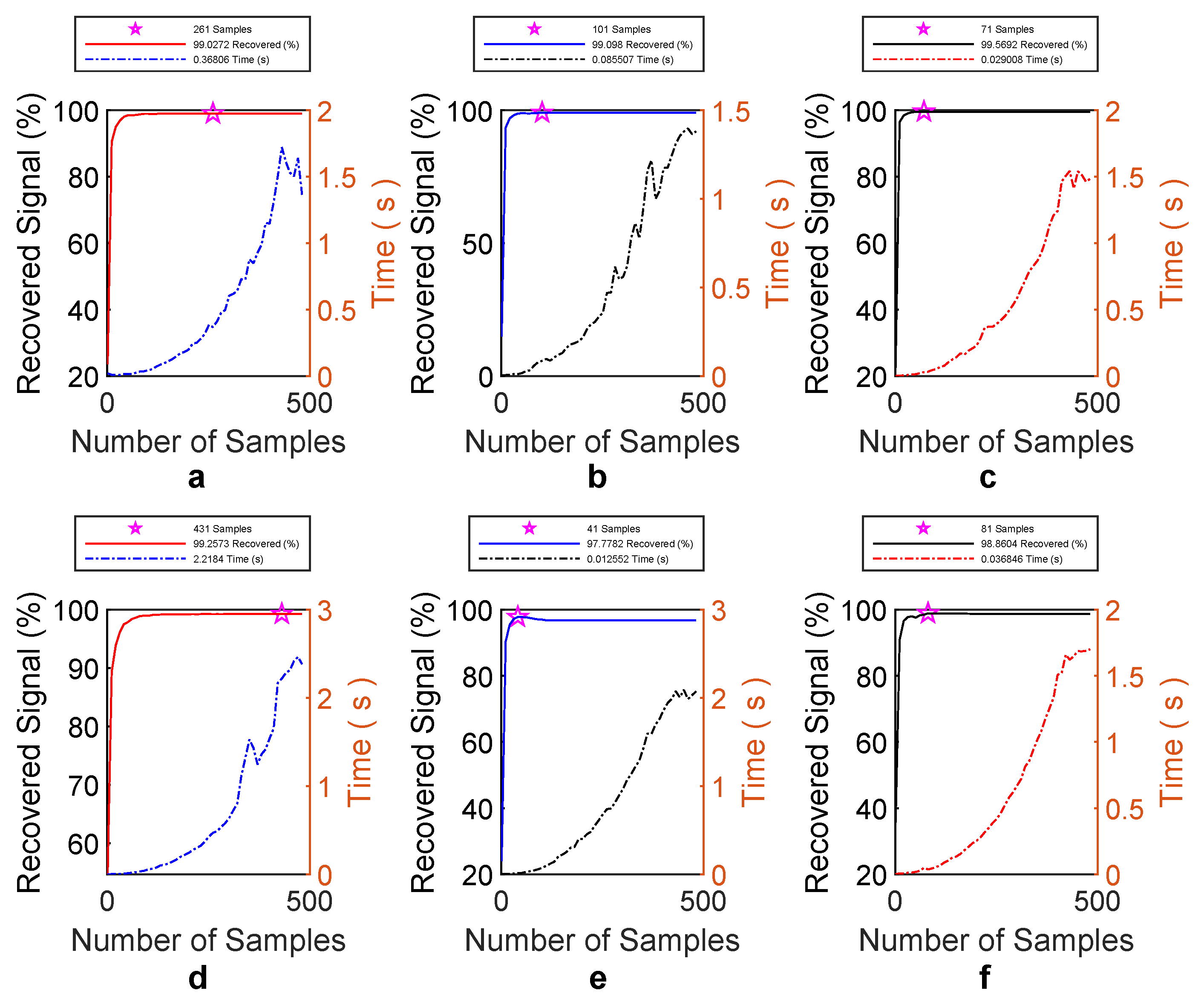
To solve the problem of signal restoration using the orthogonal matching pursuit model, it is necessary to establish the number of atoms of the signal known as k. The atoms of the signal are the samples of the signal that represent the entire signal.
Figure 8 shows the optimal number k “atoms” of the fault signal. It is shown that the number of random samples needed by the atoms was 431 (Part d) for a signal under fault conditions without noise. The machine time of the algorithm was less than 1.71 s.
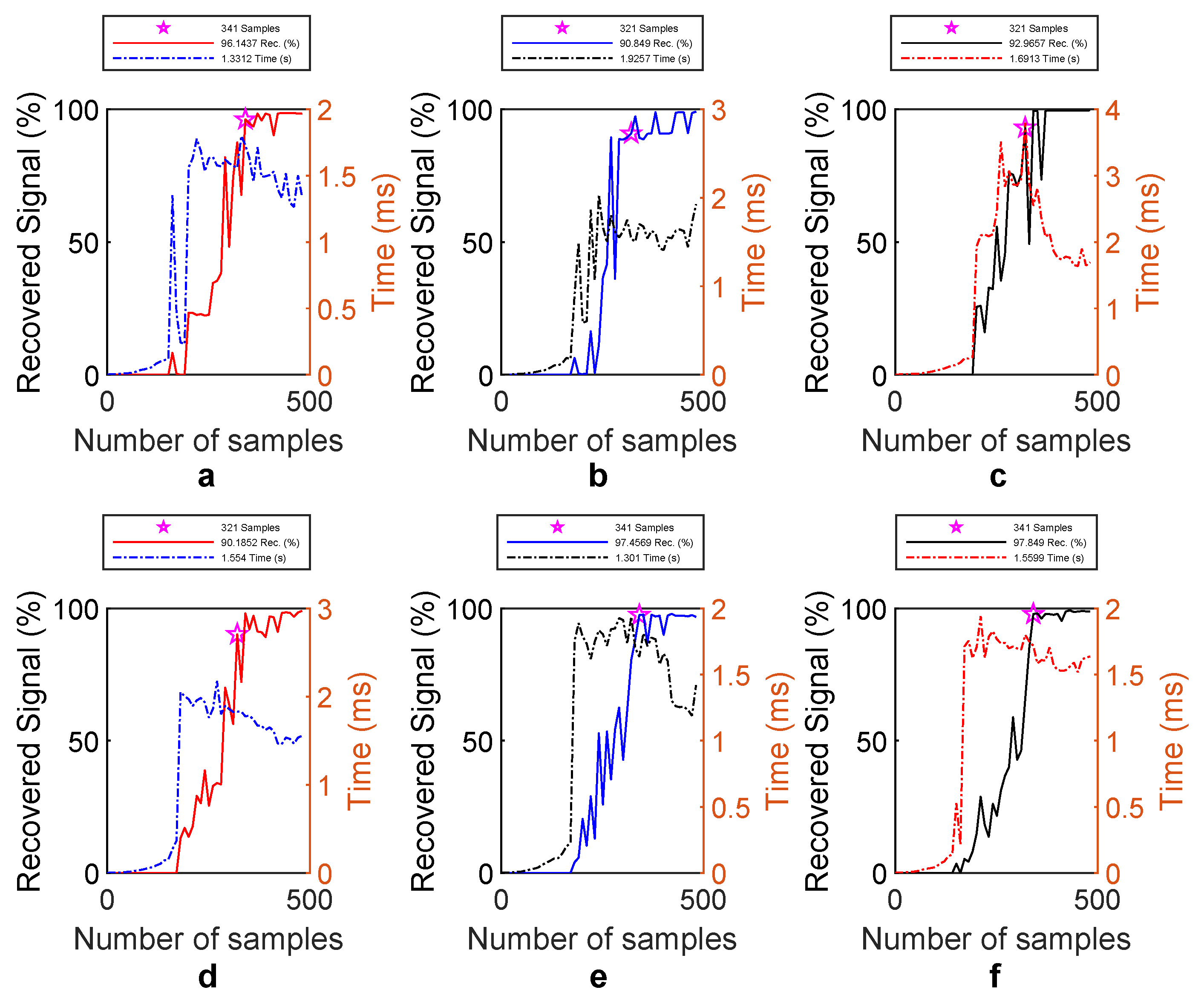
Figure 9 shows the number of samples needed to reconstruct 90% of the signal with respect to the original one. The scenario with the highest number required 341 random samples of the original signal (Parts a and e); however, Part e requires a lower time for the solution of the algorithm, which was 0.182 s.
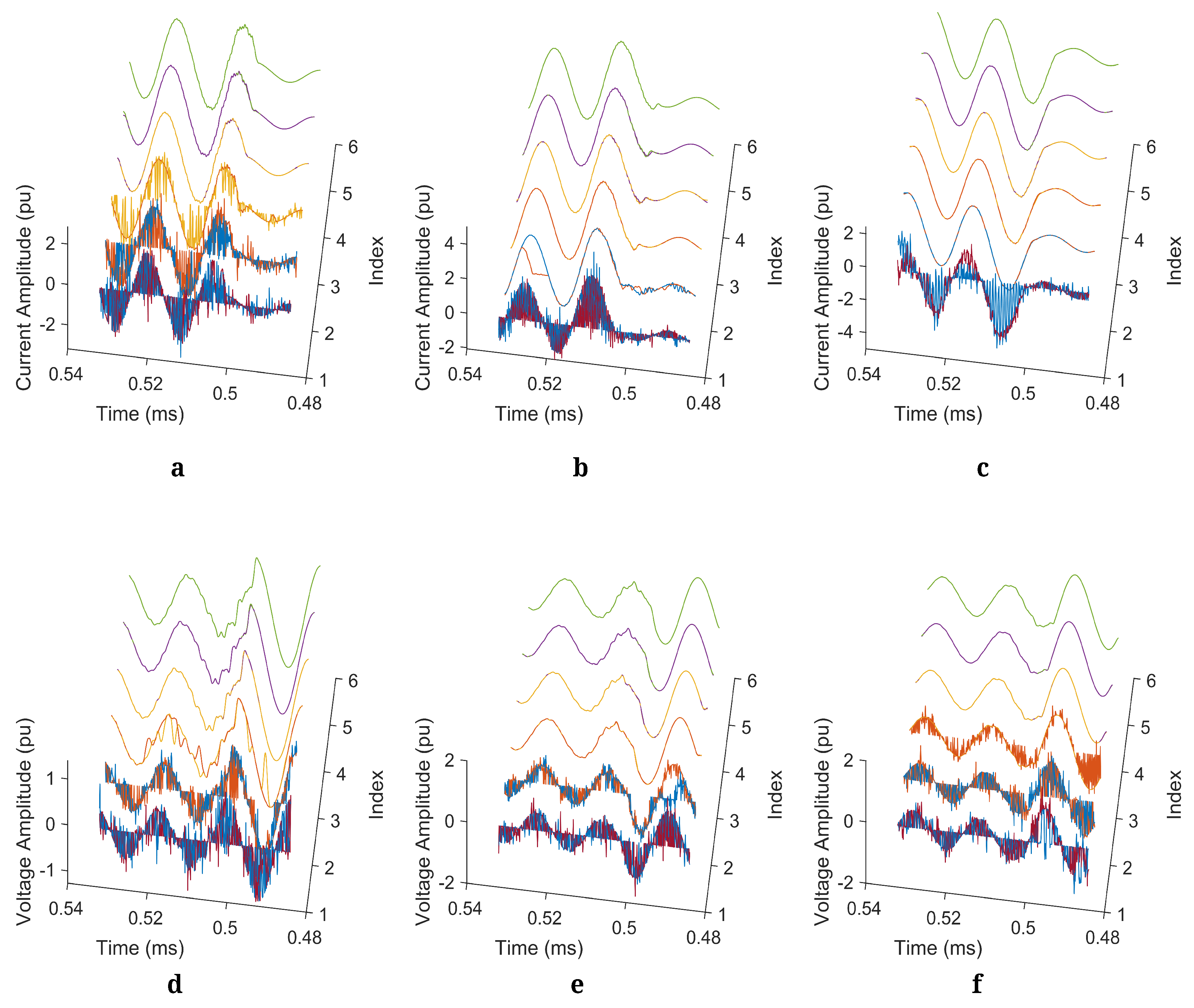
Figure 10 shows the reconstruction of the signal at a different point in the system based on 50% to 100% of random samples; thus, the value of k will be 431, as was described previously. It is important to mention that the reconstructed signals were obtained from 60% of the whole information, where orange signals eliminate the noise that occurs when the samples are spread.
4.3. Basis Pursuit Results
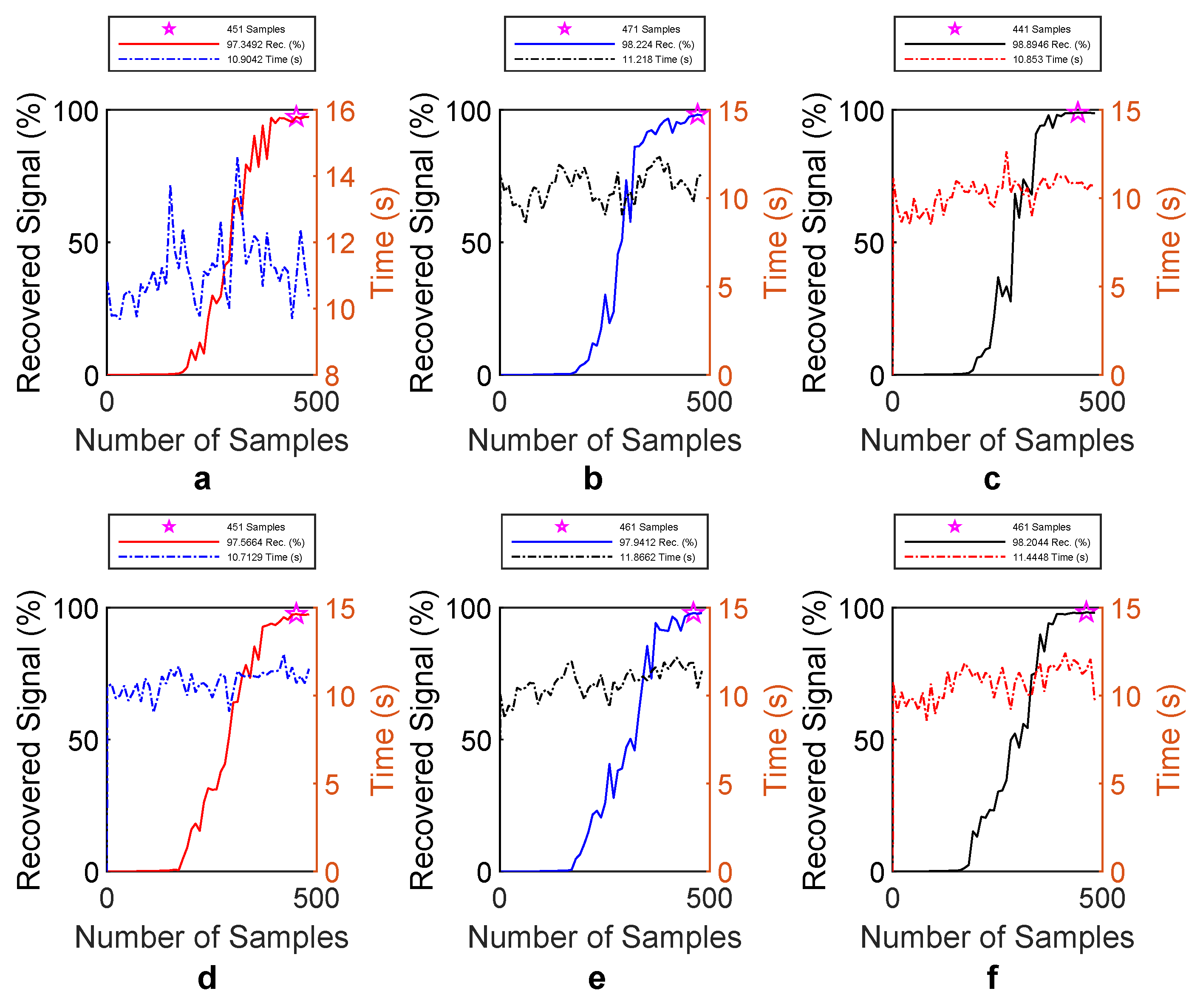
Figure 11 shows the number of samples needed to reconstruct 90% of the signal with respect to the original one. The scenario with the lowest number required 441 random samples of the original signal (Part c), and the time required for the solution of the algorithm was approximately 10.71 s, which was also the lowest time compared to the other samples analyzed in the other subfigures of the same figure.
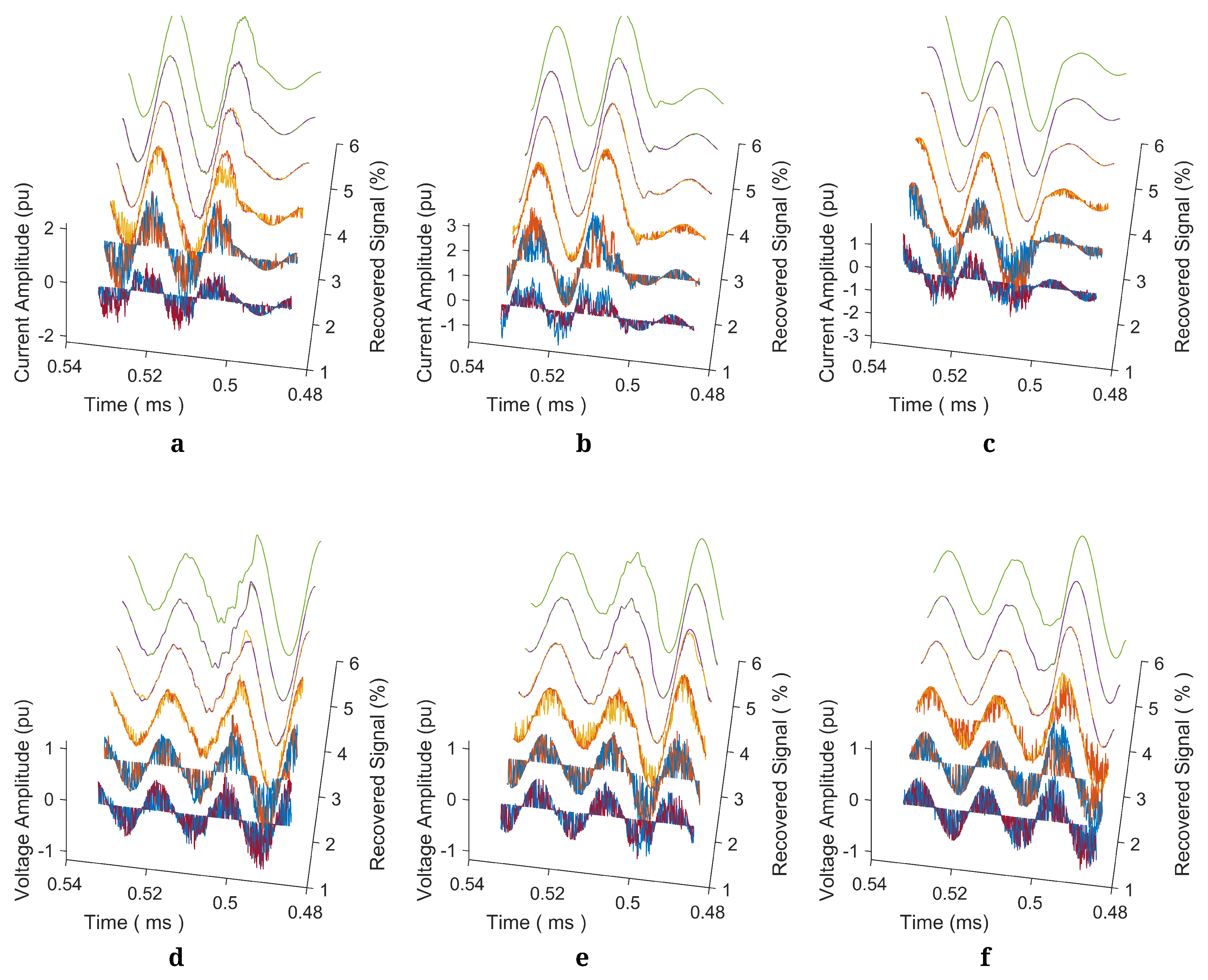
Figure 12 shows the reconstruction of the signal at a different point in the system based on 50% to 100% of random samples; thus, the value of k will be 431. It is important to mention that the reconstructed signals were obtained from 60% of the whole information, where orange signals eliminate the noise that occurs when the samples are spread.
The
Table 1 presents the summary of the different BP, MP, and OMP techniques used for signal reconstruction based on compressed sensing. The number of k and m samples necessary to reconstruct the signals is described. The error percentage and the recovery time are detailed as well.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}