1. Introduction
Electrical networks have progressively transformed from thermal dependent systems to networks with high penetration of renewable energy resources [
1,
2]. This transformation is promoted to the Paris agreement, where many countries around the world have signed compromises regarding the minimization of greenhouse emissions [
3]. This agreement forces conventional power systems to change their fossil fuel-based energy matrices (i.e., coal, natural gas, or diesel) by inserting renewable energy sources [
4]. These sources are mainly photovoltaic and wind power plants, since their construction and production costs have decreased significantly in the last years [
5]. Nevertheless, the inclusion of renewable energy sources is not a perfect solution since power systems must deal with uncertainties produced by weather variations (solar radiance or wind speed uncertainties). These uncertainties depend on the geographical location of the power system as well as the period of the year (winter or summer seasons). To tackle these uncertainties in renewable power generation, we have developed large-scale energy storage systems that allow to reduce the energy oscillations in the power system by compensating these in a dynamical form. Some of these energy storage devices can be: supercapacitors [
6], fly-wheels [
7], superconductors [
8], compressed air systems [
9], pumped-hydro systems [
10], or batteries [
11], among others. The selection of the energy storage depends on the application, i.e., for voltage and frequency compensation, fly-wheel, supercapacitors, or superconductors are preferred [
12], while long-time power supplies are preferred for pumped-hydro and battery energy storage systems [
13].
The inclusion of renewable energy sources and energy storage devices in power systems is not the only paradigm shift since other remarkable transformations have occurred, especially in distribution voltage levels [
14]. This change is caused by the transition from classical alternating current (ac) networks to direct current (dc) systems [
15]. The main advantage of using dc grids in comparison to ac is that the reactive power and frequency concepts disappear [
16], which makes dc grids easily controllable, with low energy losses and higher voltage profiles [
17]. In general, dc grids are more efficient and reliable than their ac counterparts [
16,
17,
18].
Regarding the integration of renewable energy sources and energy storage systems in dc grids, there is a clear advantage, since some of them, such as photovoltaic sources and batteries, can operate directly in dc systems, which reduces the number of power conversion stages for integrating these devices into the grids [
19]. Additionally, wind turbines or superconductors are only required in dc conversion stages since the inversion ones are unnecessary. This implies fewer electronic power converters can reduce the probability of failure and the costs of investment, maintenance, and operation [
20].
It is important to note that when distribution levels are highly influenced by renewable and energy storage technologies, they integrate into smart grids with the capability of self-management regarding control and optimization [
21,
22]. Nevertheless, in the case of DC networks, smart grids can be reduced to microgrids since dc networks are an emerging concept in distribution levels and their current size and loadability are currently constrained to small areas (i.e., buildings or data centers) [
23,
24]. Here, we wish to analyze the problem of battery location and reallocation in dc microgrids from the point of economical and technical goals that focus on proposing a new mathematical model for representing this problem. However, it is important to note that the proposed model will be extended to a large-scale dc distribution feeder when it becomes a reality in the near future without modifications [
25].
There are three different approaches to operate dc networks with high penetration of renewable energy resources and batteries, which are condensed in hierarchical control methods. The first two approaches are related to primary and secondary control strategies, which deal with power current and voltage controls [
26], and measure local state variables to maintain voltage under nominal operative conditions [
27]. Some of these controllers are designed via the sliding mode control [
28], passivity based control [
29], model predictive approach [
30], and droop control [
27], which are directly applied to the power electronic converters. The third approach is related to the optimization stage, where there exists specialized literature on tertiary control methods [
31]. This stage defines the set points regarding power and voltage to be assigned for all the active devices (i.e., power electronic converters that interfaces batteries and distributed generators) to minimize some objective function, such as, typically, grid energy losses or energy purchase costs [
18,
31,
32].
This study seeks to understand the tertiary control stage regarding optimization methods for the optimal operation of battery energy storage systems in dc networks with high penetration of renewable energy resources. In specialized literature, the optimal operation of batteries in dc grids has been addressed via economic dispatch formulation in three recent references as follows: Authors of [
33] present a semi-definite programming model to operate batteries and renewables in dc grids. The authors of [
33] proposed a relaxation of the power balance equations via semi-definite matrices, which guarantee the uniqueness of the global solution regarding the problem. The authors of [
18] proposed a second-order cone programming model to optimally dispatch renewables and batteries in dc grids. Both relaxations coincide numerically to the exact nonlinear model. The main disadvantage of this model is that the number of variables increase in square form compared to the number of nodes in the dc grid. In [
11], a nonlinear non-convex model for the optimal operation of batteries and renewable energies in dc grids considering voltage-dependent load models has been presented. This mathematical model is solved using the General Algebraic Modeling System (GAMS). It should be noted that in the previous models, the location of the batteries was predefined, and the data of the network was given by the utility. Nevertheless, there is no guarantee these locations are optimal.
Regarding the optimal location and operation of batteries in an ac electrical network, different approaches have been proposed in scientific literature, some of which are described below: the authors in [
32] presented a methodology based on genetic algorithms for the optimal location battery energy storage in ac microgrids considering the performance indicator, the net present value of investments, and the costs of the energy losses. Different simulation cases considering sunny, cloudy, and rainy days were included to analyze the interdependence between batteries and distributed generators. In addition, the numerical results reported allowed to identify the best set of renewables and batteries to provide high-quality service to grid users. The authors of [
34] proposed a methodology to increase the flexibility of microgrids with renewables that could be affected by the winter season. The authors of this research achieved a mathematical formulation with a mixed-integer programming form that can solve the battery scheduling problem efficiently via the CPLEX solver. Numerical results in a large-scale power system demonstrate the efficiency of the proposed approach for the management of heat demands in power systems, which are drastically affected by seasons through the optimal scheduling of batteries. In [
35], an optimal economic dispatch of batteries in ac distribution networks was proposed considering the minimization of the energy purchase in conventional sources. The results were obtained via GAMS implementation by considering renewables as constant inputs and batteries in fixed points. The authors of [
36] presented an optimization methodology based on genetic algorithms for the optimal location of batteries in radial distribution feeders. This approach allowed to reduce the daily operation losses of the network. In the case of batteries, the authors of [
36] proposed a binary strategy to dispatch them, which can make the implementation of the model in conventional solvers difficult; nevertheless, the results are interesting for utilities since the grid is absent of renewable energy resources, making it the main contributor.
Note that the previous approaches in ac and dc grids demonstrate that the problem of optimal location and reallocation needs more research since this is an important issue in power system analysis. For this purpose, this paper proposes an optimization model for the location-reallocation batteries, focusing on dc networks. This problem has not yet been reported or analyzed for dc networks. The proposed model has a mixed-integer nonlinear programming (MINLP) structure because of binary and nonlinear variables. The binary variables appear due to location and reallocation of batteries while the nonlinear variables are the products between the voltage variables in the power balance constraint. The proposed model analyzes two objective functions, where the first corresponds to the minimization of the energy purchase costs in the spot market by conventional generators and the second to the minimization of the daily energy losses. In addition, it also employs artificial neural networks to forecast the power generated by wind and solar generators to increase the effectiveness of the proposed model. The main contributions of this study are as follows:
To propose an MINLP model for the location-reallocation batteries in dc networks, which considers two objective functions independently or a linear combination of them. This problem has not been previously proposed in the scientific literature to the best of the knowledge of the authors. In addition, the proposed model allows to understand the compromise between the location of the batteries as a function of the perforce indicator, i.e., objective function, which demonstrates the interdependence of the batteries’ location/operation regarding energy costs and renewable energy availability.
To include in the proposed MINLP model the economic dispatch problem to maximize the use of the batteries during the day and, thus, obtain a suitable location and reallocation for them.
Three simulation cases were analyzed for the proposed model to evaluate different objective functions according to the location-reallocation of the batteries. These simulations allow to identify the best trade-offs between the final positioning of the batteries and the daily behavior of the grid, which can help the distribution grid make the best decision as a function of its goals, i.e., technical or economic objectives.
This study is organized as follows:
Section 2 presents the mathematical formulation for the optimization model,
Section 3 formulates a strategy to solve the proposed optimization model, and
Section 4 explains the test systems and proposed scenarios. The computational validation and results are analyzed in
Section 5. Lastly, the main conclusions derived from this study and possible future works are presented in
Section 6.
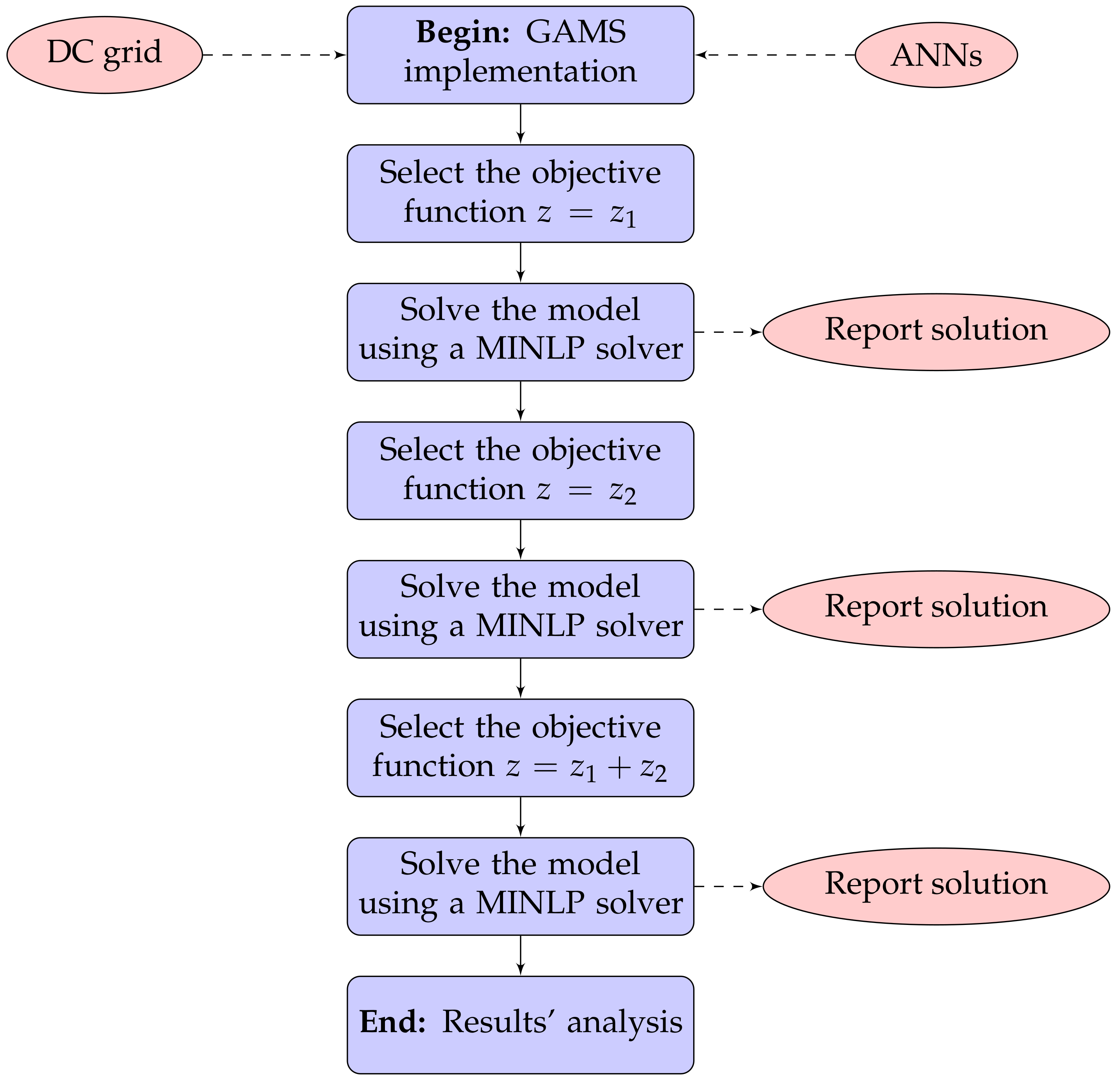
5. Computational Validation
All simulations were carried out on a desktop computer running on INTEL(R) Core(TM) i7-7700, 3.60 GHz, 8 GB RAM with 64-bit Windows 10 Pro using GAMS 25.1.3 with the nonlinear large-scale solver BONMIN licensed by Universidad Tecnológica de Bolívar in Colombia.
5.1. Simulation Conditions and Initial Function Values
To simulate the 21-node test feeder, we considered the following facts:
The batteries begin and end the day with a total charge of about 50%. During the day, this state-of-charge can vary between 10% and 90%, as recommended for Ion-Lithium batteries in [
11].
Both objective functions are evaluated with the initial position of the batteries reported in the previous section, to identify the base cases and the possible improvements when they are reallocated.
A linear combination of both objective functions was made to identify the effect of adding energy purchase costs with energy losses costs.
Once the minimization of the energy purchase cost of energy and the minimization of the cost of the daily energy losses were performed, we found the objective function
took COP
$/day 1,139,524.00 (with
) (see Equation (
1)), and the objective function
took COP
$/day
(with
) (see Expression (
2)). These values are considered the base cases for each objective function.
5.2. Optimal Reallocation of Batteries
Here, we present the optimal location-reallocation of batteries considering both objective functions.
Table 6 reports each objective function and its corresponding BESS’ location.
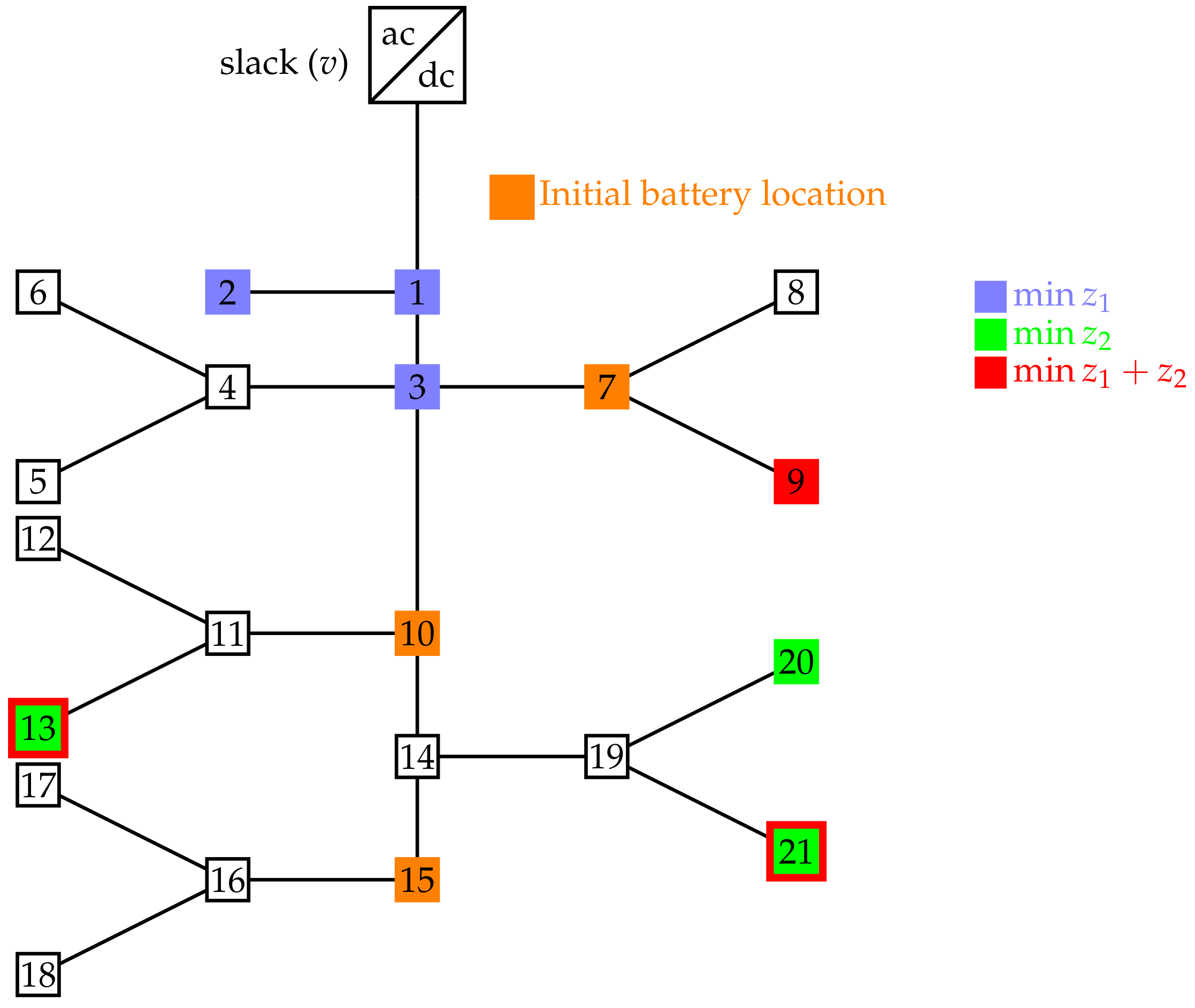
To understand the optimal reallocation of batteries as a function of the performance indicator, let us plot the locations of the batteries in the test feeder, as depicted in
Figure 7.
Based on the location-reallocation of the batteries in
Table 6 (see
Figure 7), the following facts can be highlighted:
When the objective of the optimization is to minimize the energy purchase costs at the conventional sources, i.e., , the system reduces the daily operation cost of about passing from COP$/day 1,139,524.00 to COP$/day 1,089,974.00, which implies a reduction per day about COP$/day 49,550. In addition, when we observe the total costs of the daily losses, it passes from COP$/day 131,198.70 to COP$/day 87,426.51; which is traduced in of the energy losses reduction. These results confirm that the optimal reallocation of the batteries from nodes 7, 10, and 15 to nodes 1, 2, and 3 has a positive effect on both the objective functions.
When the objective of the optimization model is to minimize the daily energy losses, i.e., , this function is reduced from COP$/day 52,957.92 to COP$/day 47,209.95, this corresponds a reduction about . This reduction is achieved by reallocating batteries from nodes 7, 10, and 15 to nodes 13, 20, and 21. In addition, the costs of the energy purchase pass from COP$/day 1,941,395.00 to COP$/day 1,843,467.00, which corresponds to a reduction of about
When the objective function is the linear combination of and , i.e., , the objective function is COP$/day 1,282,580.07; this implies an increment regarding the base of the case of the energy purchase about COP$/day 11,857.37 per day of operation. In the case of daily energy losses reduction, the linear combination reaches a reduction of COP$/day 711,772.85 per day of operation.
The previous analyses regarding different objective functions allowed us to conclude that the 21-node test feeder is always positive, considering the energy purchase costs as the objective function since it has the most important effect on the daily operation cost for the test feeder. In addition, reducing also allows to reduce the daily energy losses with respect to the base case. On the other hand, when we minimize the daily energy losses, this is reduced. Nevertheless, it also produces a negative effect on the energy purchase cost with an important increment in this objective function. For this reason, here, the minimization of the daily energy loss reduction as an adequate indicator for the optimal operation of batteries in dc networks is discarded.
Regarding the reallocation of the batteries, we observe that when we reduce the energy purchase costs, all the batteries are positioned near the slack node, as these locations allow to charge all the batteries with minimum losses when the daily energy cost is lower to inject this power when this cost increases.
5.3. Complementary Analysis
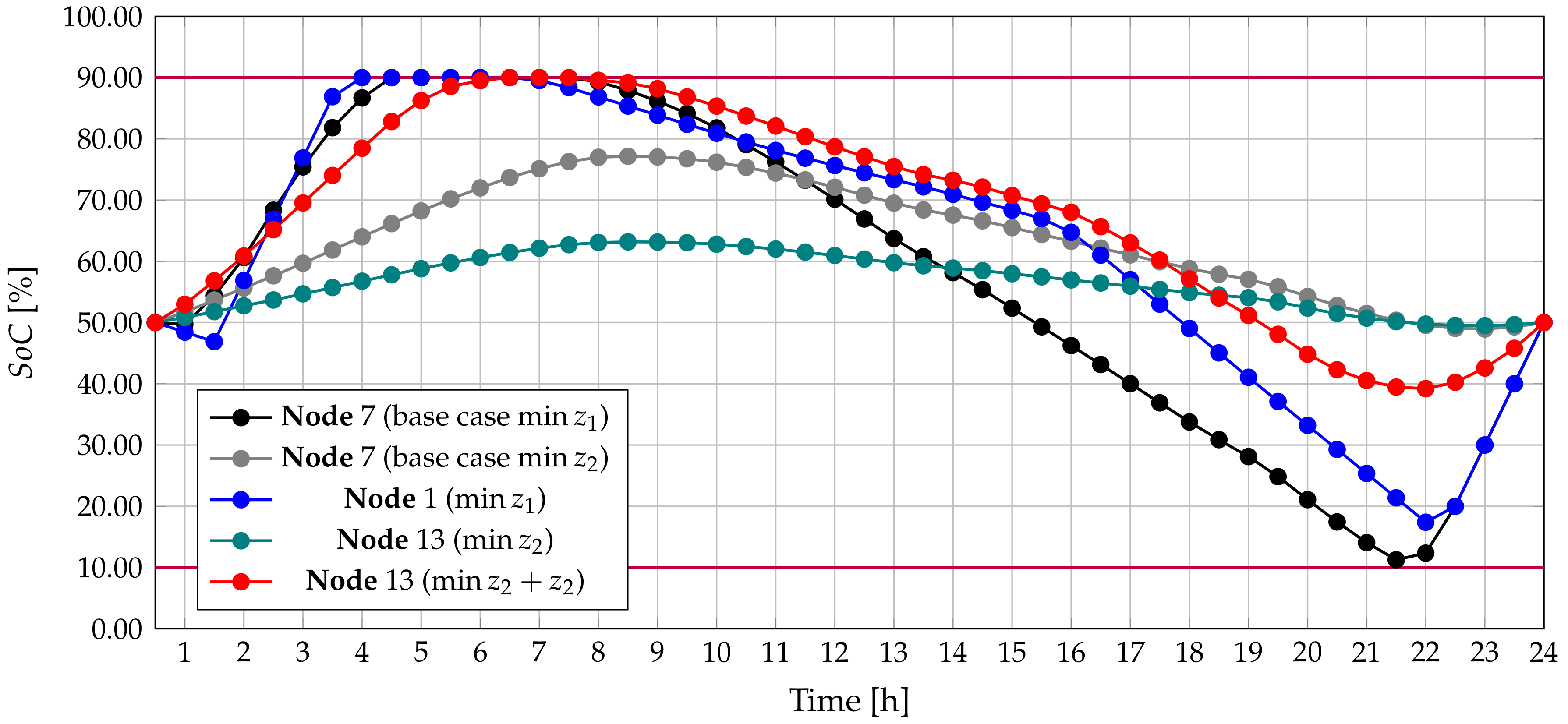
To understand whether the reallocation of the batteries satisfy the operative conditions imposed on the mathematical model, i.e., begin and end the day with
considering possible variations between
and
,
Figure 8 presents the behaviors for both base cases and the three possible locations, reported in
Table 6 for the battery type 1.
The behavior of the battery type 1 when it is located at different nodes considering variations in the objective function allows to identify the following important facts:
When the objective function is minimizing the total energy purchase cost, i.e., , this battery charges at its maximum admissible value (see periods comprehended between 0.5 h to 6). In addition, when energy cost is expensive, this battery begins to discharge continuously during fourteen hours (see periods comprehended between 8 h to 22). Finally, this battery recovers this charge in the final part of the time.
Regarding the minimization of energy losses, i.e., , we observe that the batteries charge between 50% and 80% during the day. This behavior is explained by the fact that the battery works as a generator or load; it is modifying the power flowing through the lines, which implies that it is also affecting the power losses. For this reason, it has small changes in its state-of-charge to help and minimize the total power losses during the day of operation.
In the case of combining both objective functions linearly, battery type 1 experiences both behaviors, as previously reported, at the same time, i.e., soft state-of-charge variations overpass values lower than at the end of the day.
Note that the main message of the battery behavior is regarding the different possibilities of having state-of-charges behavior as a function of the performance indicator (i.e., objective function) as well as the possible location of it. Nevertheless, in all the simulation cases, the proposed optimization model (Equations (
1)–(
12)) is feasible and allows to determine the best operation practice for batteries depending on the operative consigns imposed by the utility, which becomes the proposed optimization model the main contribution of this research.
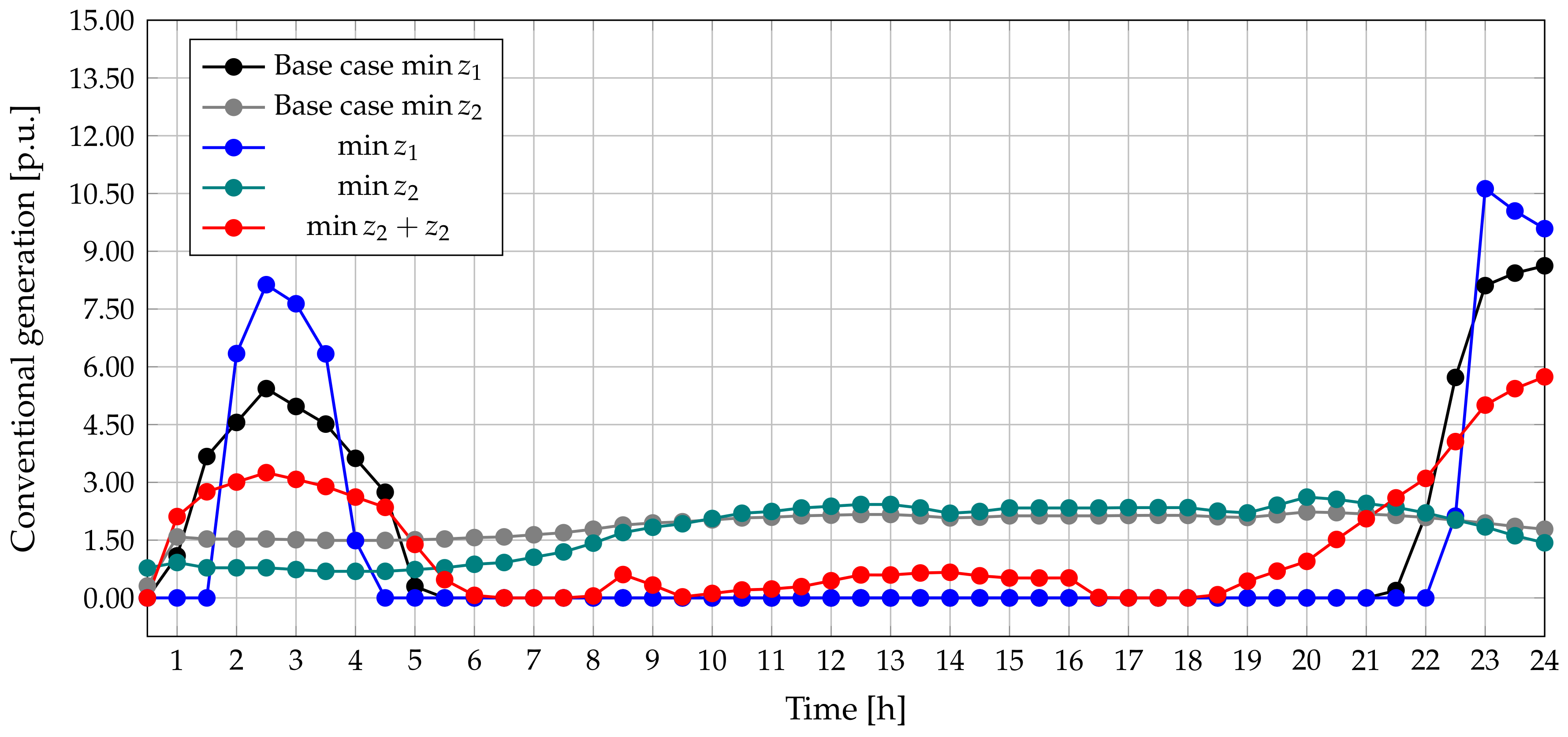
Figure 9 reports the power generation in the slack node for the base cases as well as for the different battery locations. From this plot, we can observe that:
When the objective function is minimizing , the conventional generator is used to charge all the batteries to reach their maximum admissible values at the beginning of the day. This conventional generator is also used to recover the final state of the charge imposed, i.e., 50% at the end of the day. In the rest of the periods, the energy provided by the conventional generator is zero, which minimizes the total purchase costs in the spot market and also allows to maximize the use of renewable sources.
In the case of minimization of , we can see that the conventional source generates during all the periods since this generation allows redistributing line power flows, which helps minimize the total cost of the energy losses.
Regarding the linear combination of the objective functions, it is possible to observe that at the beginning and the end of the day, the conventional generator is used for charging all the batteries while in the intermediate times, it is used for redistributing power flows; in other words, the behavior of the conventional generator is a linear combination of both analyses mentioned above.
The behavior of the conventional generators shows that in relation to the energy purchase cost minimization, its generation appears mainly in periods of time where solar energy is absent, which can be considered as an indicator for the utility to introduce additional renewable energy resources (i.e., small-hydro power [
50]) to complement solar and wind sources in order to reduce to zero the conventional generation in normal operating conditions. This also can help to indirectly reduce greenhouse emissions in isolated grids power supply by diesel or in predominantly thermal interconnected systems.
In conclusion, it is important to keep in mind that the behavior of all the variables in the proposed mathematical MINLP model highly depends on the objective function selected since it guides them to minimize or maximize the benefit established by the electricity company. In addition, all the solutions reported in this research can be taken as indicators of the grid performance; nevertheless, these are not taken as absolute results, since they also depend on the renewable generation availability, grid operative conditions, and demand behavior.
Regarding the computational effort of the proposed approach for optimal locating-reallocating batteries in dc grids, it is important to highlight that the GAMS and its SCIP solver takes about 10 min to define the optimal position of the batteries, which can be considered as a pretty small time considering the complexity of the problem (3 batteries in 21-nodes generates 1330 possible locations). In addition, if the batteries are considered in fixed locations, then, the optimization problem is transformed from an MINLP into a nonlinear programming one, reducing the processing times to 2 s for knowing the economic dispatch output, which allows access to the utilities having multiple scenarios of simulation before defining the final day-ahead economic dispatch.
5.4. Scalability of the Proposed Model
To demonstrate the scalability of the proposed approach, we present an additional simulation case regarding batteries’ location and reallocation in dc grids by using the 30-node test feeder reported in [
11]. In this test system, there are three batteries in nodes 3, 15, and 22. In addition, the objective function reported in that paper corresponds to the daily energy losses cost, which takes a value of COP
$/day 254,539.39. Once we apply our proposed reallocation approach, this cost moves to COP
$/day 244,595.39 by reallocating these batteries to nodes 18, 23, and 24, respectively, which implies a daily reduction of about
regarding power loss minimization, demonstrating that the proposed optimization approach is applicable to dc grids with a different number of nodes, i.e., it is scalable.
It is important to point out that the computational cost of the proposed approach for this test feeder is 14 and takes minutes to decide where the batteries must be reallocated; nevertheless, when the batteries are fixed, this time is reduced to 3 s, which implies that this methodology is perfectly for day-ahead analysis for dc grids with batteries, since it allows to create multiple simulation scenarios in less time.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}