Route Guidance Strategies for Electric Vehicles by Considering Stochastic Charging Demands in a Time-Varying Road Network


Abstract
:1. Introduction
2. Literature Review
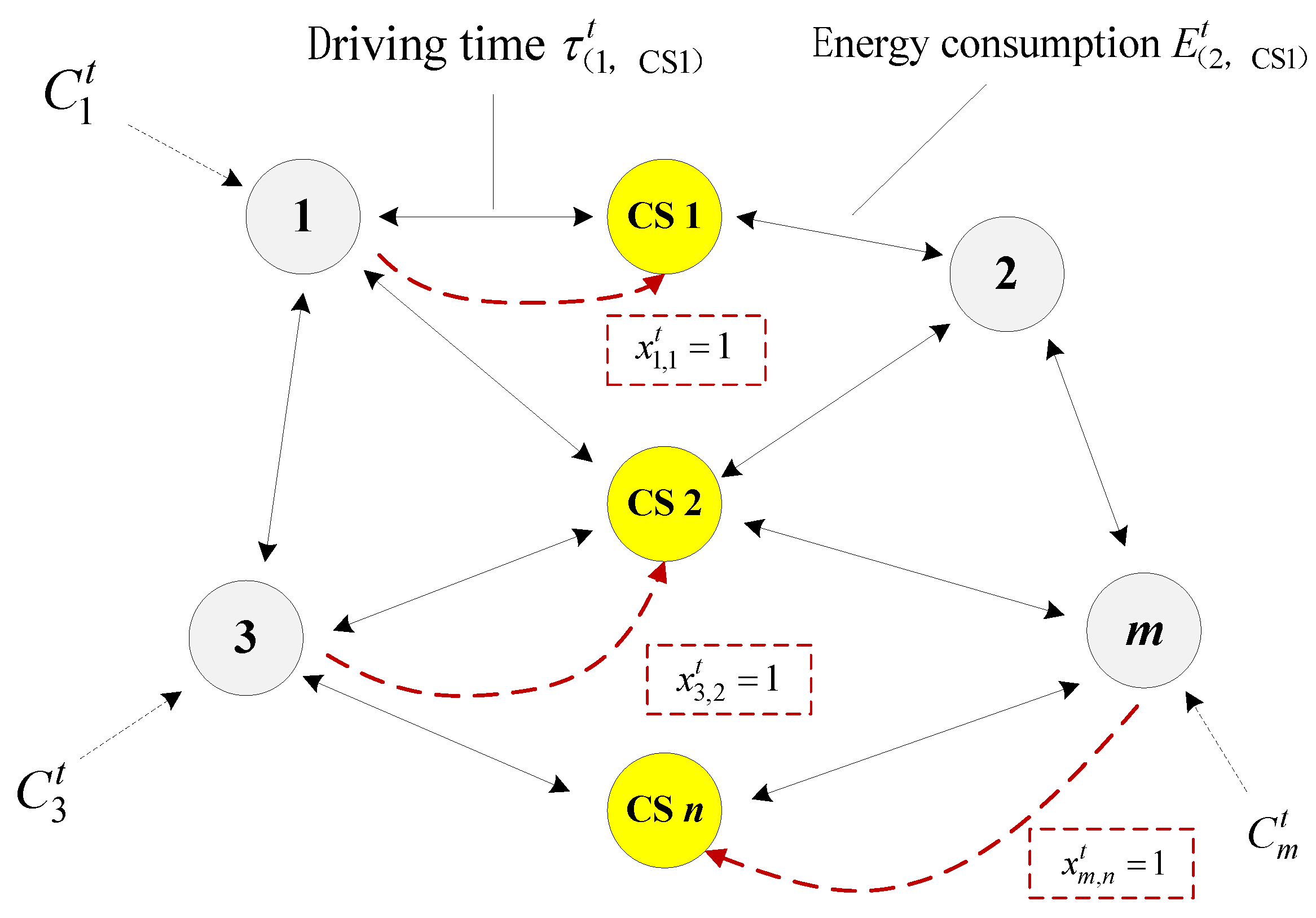
3. Problem Description
4. Route Guidance Strategies for Stochastic Charging Demands in a Time-Varying Road Network
4.1. Assumptions
4.2. Route Guidance Strategy Based on Vehicle Balance in Charging Stations
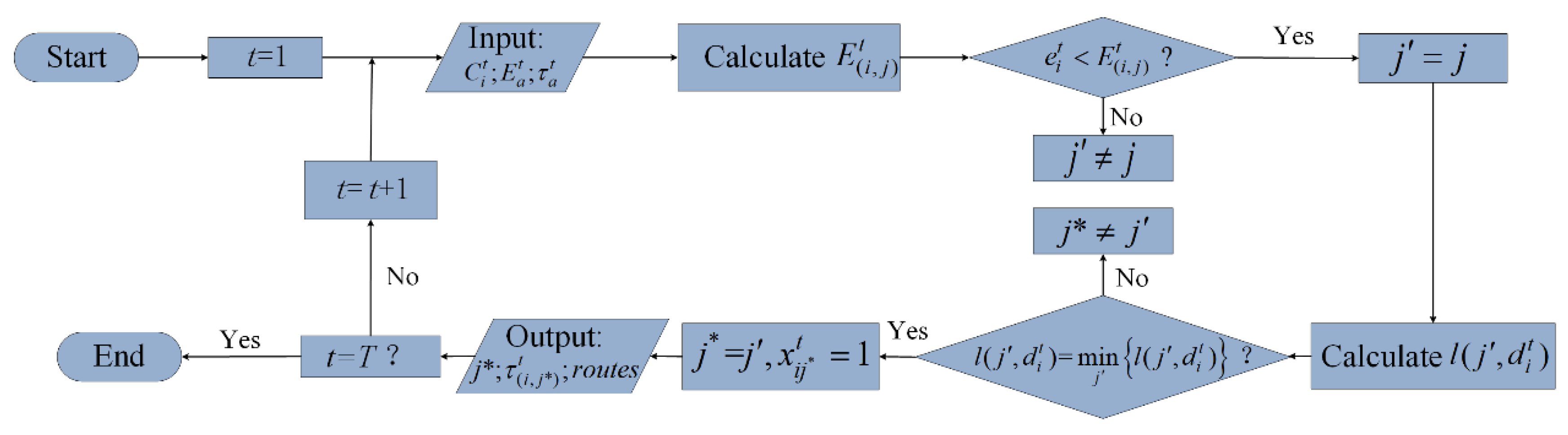
- At the beginning of time slot t, on the basis of the information of , the minimum energy consumption between all the nodes with and charging station nodes is calculated by using shortest path algorithms [49]. The minimum energy consumption between charging demand node i and charging station node j is denoted as , which is then recorded along with corresponding routes.
- For each at time slot t, is compared with . If , then charging station j is denoted as reachable charging station . Otherwise, charging station j is regarded as unreachable and then deleted from the candidate charging stations.
- For all the reachable charging stations of , the EV number in charging station at time slot t is checked. The results are denoted as .
- For each , the EV number in all reachable charging stations at time slot t is compared. The node with the heuristic suggested charging station is denoted by , which needs to satisfy the following condition:The values of decision variable can be determined as follows:If multiple charging stations with the same and minimum EV number exist, then one is randomly selected as the heuristic suggested charging station for .
- The driving time on the minimum energy routes between nodes with and corresponding heuristic suggested charging station nodes j* is calculated and recorded. The results are denoted as .
- Before the end of time slot t, the heuristic suggested charging stations j*, driving time , and corresponding routes for charging demand are output.
4.3. Route Guidance Strategy Based on the Travel Cost of Individual Drivers
- At the beginning of time slot t, the minimum energy consumption between all the nodes with and charging station nodes is calculated on the basis of the information of . The minimum energy consumption between charging demand node i and charging station node j is denoted as , which is recorded along with corresponding routes.
- For each at time slot t, is compared with . If , then charging station j is denoted as reachable charging station . Otherwise, charging station j is regarded as the unreachable one and is then deleted from the candidate charging stations.
- For the reachable charging station of , the driving distance between and the node with charging station is calculated. The results are denoted as .
- For each , the driving distance between and reachable charging station is compared. denotes the node with the heuristic suggested charging station. The minimum driving distance between and heuristic suggested charging station needs to satisfy the following condition:The values of decision variable can be determined on the basis of Equation (6). If multiple charging stations with the same and minimum driving distance exist between them and , then one is randomly selected as the heuristic suggested charging station for .
- The driving time on the minimum energy routes between nodes with and corresponding heuristic suggested charging station nodes j* is calculated and recorded. The results are denoted as .
- Before the end of time slot t, the heuristic suggested charging stations j*, driving time , and corresponding routes for the charging demand are output.
5. Simulation Analysis
5.1. Scenario Description
5.2. Simulation Results and Analysis
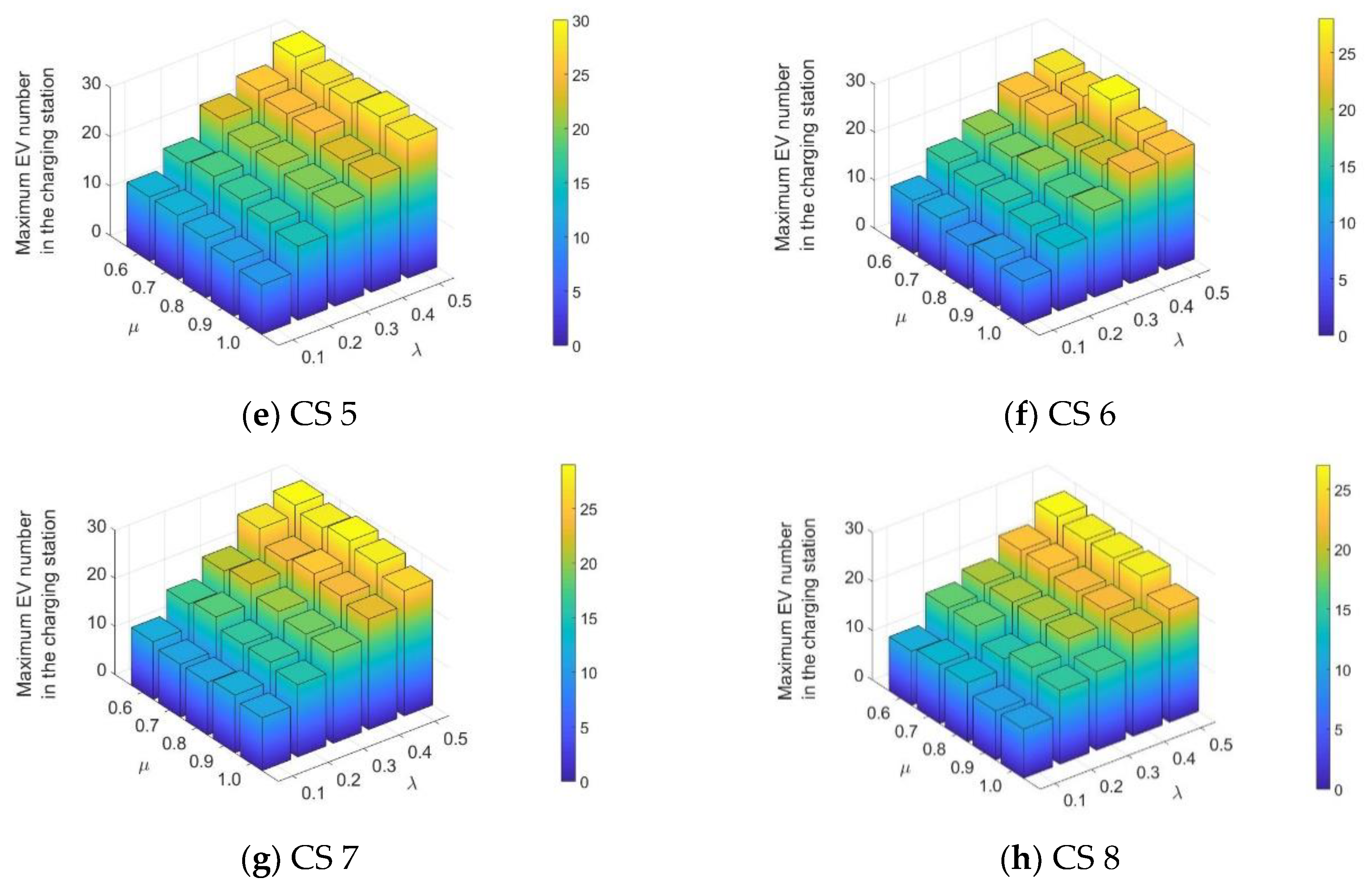
5.3. Parameter Analysis for Scenario Characteristics
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Charging station | Charging Station | Charging Station | |||
|---|---|---|---|---|---|
| CS 1 | 0.74 | CS 4 | 0.90 | CS 7 | 0.94 |
| CS 2 | 0.84 | CS 5 | 0.78 | CS 8 | 0.90 |
| CS 3 | 0.94 | CS 6 | 0.87 |
| Normal Node | Normal Node | Normal Node | Normal Node | ||||
|---|---|---|---|---|---|---|---|
| 1 | 0.31 | 5 | 0.20 | 9 | 0.18 | 13 | 0.57 |
| 2 | 0.62 | 6 | 0.13 | 10 | 0.27 | 14 | 0.35 |
| 3 | 0.32 | 7 | 0.50 | 11 | 0.15 | 15 | 0.52 |
| 4 | 0.69 | 8 | 0.25 | 12 | 0.26 | 16 | 0.67 |
| Link a | Link a | Link a | |||
|---|---|---|---|---|---|
| 1–CS 1 | (2.64, 5.76) | 9–7 | (2.16, 4.8) | CS 1–2 | (1.68, 4.08) |
| 1–4 | (3.6, 5.04) | 9–11 | (2.16, 5.04) | CS 2–3 | (3.6, 6.96) |
| 2–CS 1 | (2.4, 4.8) | 10–CS 4 | (2.64, 5.52) | CS 2–4 | (2.88, 6.48) |
| 2–3 | (1.92, 4.56) | 10–12 | (1.44, 4.08) | CS 2–5 | (3.6, 4.8) |
| 3–2 | (3.12, 4.32) | 10–CS 7 | (2.64, 4.56) | CS 3–2 | (2.88, 6) |
| 3–CS 4 | (1.44, 3.84) | 11–9 | (2.16, 3.6) | CS 3–CS 4 | (2.88, 5.28) |
| 3–CS 2 | (1.2, 4.32) | 11–CS 7 | (1.2, 4.56) | CS 3–14 | (2.16, 4.8) |
| 4–1 | (2.16, 3.6) | 11–16 | (1.44, 3.36) | CS 4–3 | (1.2, 4.8) |
| 4–CS 2 | (2.4, 5.28) | 12–10 | (2.16, 4.8) | CS 4–7 | (2.64, 6) |
| 4–6 | (3.12, 6.48) | 12–13 | (2.4, 4.8) | CS 4–10 | (3.12, 6.72) |
| 5–CS 2 | (2.88, 5.28) | 12–CS 8 | (1.92, 4.8) | CS 4–CS 3 | (2.88, 4.8) |
| 5–6 | (2.4, 3.6) | 13–CS 7 | (3.36, 5.04) | CS 5–6 | (1.2, 3.12) |
| 5–7 | (1.68, 3.6) | 13–12 | (2.64, 4.56) | CS 5–7 | (1.44, 3.36) |
| 6–4 | (1.44.5.04) | 13–15 | (1.68, 4.56) | CS 5–8 | (3.12, 5.04) |
| 6–5 | (2.16, 3.6) | 13–16 | (1.44, 5.04) | CS 5–9 | (2.4, 5.04) |
| 6–CS 5 | (2.16, 5.28) | 14–CS 3 | (3.12, 5.04) | CS 6–6 | (2.16, 4.08) |
| 6–CS 6 | (3.6, 5.52) | 14–CS 8 | (2.88, 6.24) | CS 6–8 | (1.92, 5.52) |
| 7–5 | (3.6, 5.52) | 15–13 | (1.92, 5.28) | CS 7–7 | (1.68, 4.56) |
| 7–CS 4 | (1.92, 4.32) | 15–CS 8 | (1.2, 4.56) | CS 7–10 | (3.6, 6.72) |
| 7–CS 7 | (3.36, 5.52) | 15–16 | (2.16, 5.28) | CS 7–11 | (2.16, 3.84) |
| 7–9 | (2.64, 6.24) | 16–8 | (2.4, 4.08) | CS 7–13 | (1.44, 2.88) |
| 7–CS 5 | (2.4, 4.32) | 16–11 | (2.4, 6) | CS 8–12 | (2.4, 3.6) |
| 8–CS 6 | (3.36, 4.8) | 16–13 | (3.36, 6.72) | CS 8–14 | (1.2, 3.84) |
| 8–CS 5 | (3.12, 4.8) | 16–15 | (3.6, 6.96) | CS 8–15 | (2.64, 5.28) |
| 8–16 | (2.4, 3.84) | CS 1–1 | (2.16, 5.28) | 2–CS 3 | (2.16, 4.32) |
| 9–CS 5 | (1.2, 4.32) |
| Link a | Link a | Link a | |||
|---|---|---|---|---|---|
| 1–CS 1 | (2, 5) | 9–7 | (1, 2) | CS 1–2 | (1, 3) |
| 1–4 | (1, 4) | 9–11 | (1, 2) | CS 2–3 | (1, 2) |
| 2–CS 1 | (2, 3) | 10–CS 4 | (1, 2) | CS 2–4 | (2, 4) |
| 2–3 | (1, 2) | 10–12 | (1, 2) | CS 2–5 | (1, 3) |
| 3–2 | (2, 3) | 10–CS 7 | (2, 4) | CS 3–2 | (1, 2) |
| 3–CS 4 | (2, 3) | 11–9 | (1, 2) | CS 3–CS 4 | (1, 3) |
| 3–CS 2 | (1, 4) | 11–CS 7 | (2, 4) | CS 3–14 | (1, 2) |
| 4–1 | (1, 2) | 11–16 | (1, 2) | CS 4–3 | (1, 2) |
| 4–CS 2 | (2, 4) | 12–10 | (2, 3) | CS 4–7 | (1, 3) |
| 4–6 | (1, 2) | 12–13 | (1, 2) | CS 4–10 | (1, 3) |
| 5–CS 2 | (1, 2) | 12–CS 8 | (1, 4) | CS 4–CS 3 | (1, 2) |
| 5–6 | (1, 2) | 13–CS 7 | (1, 3) | CS 5–6 | (1, 2) |
| 5–7 | (2, 3) | 13–12 | (1, 2) | CS 5–7 | (1, 2) |
| 6–4 | (1, 2) | 13–15 | (2, 3) | CS 5–8 | (1, 2) |
| 6–5 | (1, 2) | 13–16 | (1, 2) | CS 5–9 | (1, 2) |
| 6–CS 5 | (1, 3) | 14–CS 3 | (2, 4) | CS 6–6 | (1, 3) |
| 6–CS 6 | (1, 2) | 14–CS 8 | (2, 3) | CS 6–8 | (2, 3) |
| 7–5 | (1, 2) | 15–13 | (2, 3) | CS 7–7 | (1, 3) |
| 7–CS 4 | (2, 5) | 15–CS 8 | (2, 5) | CS 7–10 | (1, 3) |
| 7–CS 7 | (2, 4) | 15–16 | (1, 2) | CS 7–11 | (1, 2) |
| 7–9 | (1, 2) | 16–8 | (1, 3) | CS 7–13 | (1, 2) |
| 7–CS 5 | (1, 3) | 16–11 | (1, 2) | CS 8–12 | (2, 3) |
| 8–CS 6 | (2, 5) | 16–13 | (1, 3) | CS 8–14 | (1, 2) |
| 8–CS 5 | (2, 4) | 16–15 | (2, 3) | CS 8–15 | (1, 2) |
| 8–16 | (1, 2) | CS 1–1 | (1, 2) | 2–CS 3 | (1, 3) |
| 9–CS 5 | (2, 3) |
| Link a | la (km) | Link a | la (km) | Link a | la (km) |
|---|---|---|---|---|---|
| 1–CS 1 | 23 | 9–7 | 15 | CS 1–2 | 11 |
| 1–4 | 12 | 9–11 | 10 | CS 2–3 | 10 |
| 2–CS 1 | 11 | 10–CS 4 | 14 | CS 2–4 | 10 |
| 2–3 | 10 | 10–12 | 11 | CS 2–5 | 11 |
| 3–2 | 10 | 10–CS 7 | 12 | CS 3–2 | 17 |
| 3–CS 4 | 20 | 11–9 | 10 | CS 3–CS 4 | 12 |
| 3–CS 2 | 10 | 11–CS 7 | 12 | CS 3–14 | 22 |
| 4–1 | 12 | 11–16 | 16 | CS 4–3 | 20 |
| 4–CS 2 | 10 | 12–10 | 11 | CS 4–7 | 10 |
| 4–6 | 12 | 12–13 | 12 | CS 4–10 | 14 |
| 5–CS 2 | 11 | 12–CS 8 | 10 | CS 4–CS 3 | 12 |
| 5–6 | 10 | 13–CS 7 | 11 | CS 5–6 | 11 |
| 5–7 | 12 | 13–12 | 12 | CS 5–7 | 11 |
| 6–4 | 12 | 13–15 | 10 | CS 5–8 | 10 |
| 6–5 | 10 | 13–16 | 16 | CS 5–9 | 11 |
| 6–CS 5 | 11 | 14–CS 3 | 22 | CS 6–6 | 12 |
| 6–CS 6 | 12 | 14–CS 8 | 12 | CS 6–8 | 12 |
| 7–5 | 12 | 15–13 | 10 | CS 7–7 | 18 |
| 7–CS 4 | 10 | 15–CS 8 | 11 | CS 7–10 | 12 |
| 7–CS 7 | 18 | 15–16 | 10 | CS 7–11 | 12 |
| 7–9 | 15 | 16–8 | 30 | CS 7–13 | 11 |
| 7–CS 5 | 11 | 16–11 | 16 | CS 8–12 | 10 |
| 8–CS 6 | 12 | 16–13 | 16 | CS 8–14 | 12 |
| 8–CS 5 | 10 | 16–15 | 10 | CS 8–15 | 11 |
| 8–16 | 30 | CS 1–1 | 23 | 2–CS 3 | 17 |
| 9–CS 5 | 11 |
References
- International Energy Agency. Global EV Outlook 2017; IEA: Paris, France, 2017. [Google Scholar]
- Rezvani, Z.; Jansson, J.; Bodin, J. Advances in consumer electric vehicle adoption research: A review and research agenda. Transp. Res. Part D Transp. Environ. 2015, 34, 122–136. [Google Scholar] [CrossRef] [Green Version]
- Melliger, M.; Van Vliet, O.; Liimatainen, H. Anxiety vs. reality—Sufficiency of battery electric vehicle range in Switzerland and Finland. Transp. Res. Part D Transp. Environ. 2018, 65, 101–115. [Google Scholar] [CrossRef]
- Wang, Y.; Bi, J.; Zhao, X.; Guan, W. A geometry-based algorithm to provide guidance for electric vehicle charging. Transp. Res. Part D Transp. Environ. 2018, 63, 890–906. [Google Scholar] [CrossRef]
- Gendreau, M.; Ghiani, G.; Guerriero, E. Time-dependent routing problems: A review. Comput. Oper. Res. 2015, 64, 189–197. [Google Scholar] [CrossRef]
- Artmeier, A.; Haselmayr, J.; Leucker, M.; Sachenbacher, M. The shortest path problem revisited: Optimal routing for electric vehicles. In Annual Conference on Artificial Intelligence; Springer: Berlin/Heidelberg, Germany, 2010; pp. 309–316. [Google Scholar]
- Storandt, S. Quick and energy-efficient routes: Computing constrained shortest paths for electric vehicles. In Proceedings of the 5th ACM SIGSPATIAL International Workshop on Computational Transportation Science, Redondo Beach, CA, USA, 7–9 November 2012; ACM: New York, NY, USA, 2012; pp. 20–25. [Google Scholar]
- Neaimeh, M.; Hill, G.; Hübner, Y.; Blythe, P.T. Routing systems to extend the driving range of electric vehicles. IET Intell. Transp. Syst. 2013, 7, 327–336. [Google Scholar] [CrossRef] [Green Version]
- Sweda, T.; Dolinskaya, I.; Klabjan, D. Adaptive routing and recharging policies for electric vehicles. Transp. Sci. 2017, 51, 1326–1348. [Google Scholar] [CrossRef]
- Qin, H.; Zhang, W. Charging scheduling with minimal waiting in a network of electric vehicles and charging stations. In Proceedings of the Eighth ACM International Workshop on Vehicular Inter-Networking, Las Vegas, NV, USA, 19 –23 September 2011; ACM: New York, NY, USA, 2011; pp. 51–60. [Google Scholar]
- Said, D.; Cherkaoui, S.; Khoukhi, L. Queuing model for EVs charging at public supply stations. In Proceedings of the 2013 9th International Wireless Communications and Mobile Computing Conference (IWCMC), Sardinia, Italy, 1–5 July 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 65–70. [Google Scholar]
- Yang, S.; Cheng, W.; Hsu, Y.; Gan, C.; Lin, Y. Charge scheduling of electric vehicles in highways. Math. Comput. Model. 2013, 57, 2873–2882. [Google Scholar] [CrossRef]
- De Weerdt, M.; Stein, S.; Gerding, E.; Robu, V.; Jennings, N. Intention-aware routing of electric vehicles. IEEE Trans. Intell. Transp. Syst. 2015, 17, 1472–1482. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Aliya, B.; Zhou, Y.; You, I.; Zhang, X.; Pau, G.; Collotta, M. Shortest feasible paths with partial charging for battery-powered electric vehicles in smart cities. Pervasive Mob. Comput. 2018, 50, 82–93. [Google Scholar] [CrossRef]
- Wang, T.; Cassandras, C.; Pourazarm, S. Energy-aware vehicle routing in networks with charging nodes. IFAC Proc. Vol. 2014, 47, 9611–9616. [Google Scholar] [CrossRef] [Green Version]
- Cao, Y.; Tang, S.; Li, C.; Zhang, P.; Tan, Y.; Zhang, Z.; Li, J. An optimized EV charging model considering TOU price and SOC curve. IEEE Trans. Smart Grid 2011, 3, 388–393. [Google Scholar] [CrossRef]
- Liu, C.; Wu, J.; Long, C. Joint charging and routing optimization for electric vehicle navigation systems. IFAC Proc. Vol. 2014, 47, 2106–2111. [Google Scholar] [CrossRef] [Green Version]
- Yagcitekin, B.; Uzunoglu, M. A double-layer smart charging strategy of electric vehicles taking routing and charge scheduling into account. Appl. Energy 2016, 167, 407–419. [Google Scholar] [CrossRef]
- Sun, Z.; Zhou, X. To save money or to save time: Intelligent routing design for plug-in hybrid electric vehicle. Transp. Res. Part D Transp. Environ. 2016, 43, 238–250. [Google Scholar] [CrossRef]
- Wang, Y.; Bi, J.; Guan, W.; Zhao, X. Optimising route choices for the travelling and charging of battery electric vehicles by considering multiple objectives. Transp. Res. Part D Transp. Environ. 2018, 64, 246–261. [Google Scholar] [CrossRef]
- Wang, Y.; Jiang, J.; Mu, T. Context-aware and energy-driven route optimization for fully electric vehicles via crowdsourcing. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1331–1345. [Google Scholar] [CrossRef]
- Abousleiman, R.; Rawashdeh, O.; Abousleiman, R.; Rawashdeh, O. A Bellman-Ford approach to energy efficient routing of electric vehicles. In Proceedings of the 2015 IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 14–17 June 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–4. [Google Scholar]
- Strehler, M.; Merting, S.; Schwan, C. Energy-efficient shortest routes for electric and hybrid vehicles. Transp. Res. Part B Methodol. 2017, 103, 111–135. [Google Scholar] [CrossRef]
- Fiori, C.; Ahn, K.; Rakha, H. Optimum routing of battery electric vehicles: Insights using empirical data and microsimulation. Transp. Res. Part D Transp. Environ. 2018, 64, 262–272. [Google Scholar] [CrossRef]
- Fernández, R. A more realistic approach to electric vehicle contribution to greenhouse gas emissions in the city. J. Clean. Prod. 2018, 172, 949–959. [Google Scholar] [CrossRef]
- Alizadeh, M.; Wai, H.; Scaglione, A.; Goldsmith, A.; Fan, Y.; Javidi, T. Optimized path planning for electric vehicle routing and charging. In Proceedings of the 2014 52nd Annual Allerton Conference on Communication, Control, and Computing (Allerton), Monticello, IL, USA, 30 September–3 October 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 25–32. [Google Scholar]
- Yi, Z.; Bauer, P. Optimal stochastic eco-routing solutions for electric vehicles. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3807–3817. [Google Scholar] [CrossRef]
- Zhang, S.; Luo, Y.; Li, K. Multi-objective route search for electric vehicles using ant colony optimization. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 637–642. [Google Scholar]
- Jafari, E.; Boyles, S. Multicriteria stochastic shortest path problem for electric vehicles. Netw. Spat. Econ. 2017, 17, 1043–1070. [Google Scholar] [CrossRef]
- Daina, N.; Sivakumar, A.; Polak, J. Electric vehicle charging choices: Modelling and implications for smart charging services. Transp. Res. Part C Emerg. Technol. 2017, 81, 36–56. [Google Scholar] [CrossRef]
- Huber, G.; Bogenberger, K. Long-Trip Optimization of Charging Strategies for Battery Electric Vehicles. Transp. Res. Rec. 2015, 2497, 45–53. [Google Scholar] [CrossRef]
- Jiang, N.; Xie, C.; Duthie, J.; Waller, S. A network equilibrium analysis on destination, route and parking choices with mixed gasoline and electric vehicular flows. EURO J. Transp. Logist. 2014, 3, 55–92. [Google Scholar] [CrossRef] [Green Version]
- He, F.; Yin, Y.; Lawphongpanich, S. Network equilibrium models with battery electric vehicles. Transp. Res. Part B Methodol. 2014, 67, 306–319. [Google Scholar] [CrossRef]
- Xie, C.; Jiang, N. Relay requirement and traffic assignment of electric vehicles. Comput. -Aided Civ. Infrastruct. Eng. 2016, 31, 580–598. [Google Scholar] [CrossRef]
- Xu, M.; Meng, Q.; Liu, K. Network user equilibrium problems for the mixed battery electric vehicles and gasoline vehicles subject to battery swapping stations and road grade constraints. Transp. Res. Part B Methodol. 2017, 99, 138–166. [Google Scholar] [CrossRef]
- Hung, Y.; Michailidis, G. Optimal routing for electric vehicle service systems. Eur. J. Oper. Res. 2015, 247, 515–524. [Google Scholar] [CrossRef]
- Bi, J.; Wang, Y.; Sai, Q.; Ding, C. Estimating remaining driving range of battery electric vehicles based on real-world data: A case study of Beijing, China. Energy 2019, 169, 833–843. [Google Scholar] [CrossRef]
- Huang, Y.; Zhao, L.; Van Woensel, T.; Gross, J. Time-dependent vehicle routing problem with path flexibility. Transp. Res. Part B Methodol. 2017, 95, 169–195. [Google Scholar] [CrossRef]
- Neely, M.; Modiano, E.; Rohrs, C. Dynamic power allocation and routing for time-varying wireless networks. IEEE J. Sel. Areas Commun. 2005, 23, 89–103. [Google Scholar] [CrossRef] [Green Version]
- Polson, N.; Sokolov, V. Deep learning for short-term traffic flow prediction. Transp. Res. Part C Emerg. Technol. 2017, 79, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Cheng, L.; Chang, Y.; Huang, R. Mitigating voltage problem in distribution system with distributed solar generation using electric vehicles. IEEE Trans. Sustain. Energy 2015, 6, 1475–1484. [Google Scholar] [CrossRef]
- Xu, Z.; Su, W.; Hu, Z.; Song, Y.; Zhang, H. A hierarchical framework for coordinated charging of plug-in electric vehicles in China. IEEE Trans. Smart Grid 2015, 7, 428–438. [Google Scholar] [CrossRef]
- Esfahani, M.; Yousefi, G. Real time congestion management in power systems considering quasi-dynamic thermal rating and congestion clearing time. IEEE Trans. Ind. Inform. 2016, 12, 745–754. [Google Scholar] [CrossRef]
- Gnann, T.; Funke, S.; Jakobsson, N.; Plötz, P.; Sprei, F.; Bennehag, A. Fast charging infrastructure for electric vehicles: Today’s situation and future needs. Transp. Res. Part D Transp. Environ. 2018, 62, 314–329. [Google Scholar] [CrossRef]
- Li, B.; Eryilmaz, A. Non-derivative algorithm design for efficient routing over unreliable stochastic networks. Perform. Eval. 2014, 71, 44–60. [Google Scholar] [CrossRef]
- Franke, T.; Krems, J.F. Understanding charging behaviour of electric vehicle users. Transp. Res. Part F Traffic Psychol. Behav. 2013, 21, 75–89. [Google Scholar] [CrossRef]
- Raslavičius, L.; Azzopardi, B.; Keršys, A.; Starevičius, M.; Bazaras, Ž.; Makaras, R. Electric vehicles challenges and opportunities: Lithuanian review. Renew. Sustain. Energy Rev. 2015, 42, 786–800. [Google Scholar] [CrossRef]
- Bi, J.; Wang, Y.; Sun, S.; Guan, W. Predicting Charging Time of Battery Electric Vehicles Based on Regression and Time-Series Methods: A Case Study of Beijing. Energies 2018, 11, 1040. [Google Scholar] [CrossRef] [Green Version]
- Fu, L.; Sun, D.; Rilett, L.R. Heuristic shortest path algorithms for transportation applications: State of the art. Comput. Oper. Res. 2006, 33, 3324–3343. [Google Scholar] [CrossRef]
- Gao, S.; Frejinger, E.; Ben-Akiva, M. Adaptive route choices in risky traffic networks: A prospect theory approach. Transp. Res. Part C Emerg. Technol. 2010, 18, 727–740. [Google Scholar] [CrossRef]
- Braekers, K.; Ramaekers, K.; Van Nieuwenhuyse, I. The vehicle routing problem: State of the art classification and review. Comput. Ind. Eng. 2016, 99, 300–313. [Google Scholar] [CrossRef]
- Bi, J.; Wang, Y.; Zhang, J. A data-based model for driving distance estimation of battery electric logistics vehicles. EURASIP J. Wirel. Commun. Netw. 2018, 2018, 251. [Google Scholar] [CrossRef]
- Yang, Y.; Yao, E.; Yang, Z.; Zhang, R. Modeling the charging and route choice behavior of BEV drivers. Transp. Res. Part C Emerg. Technol. 2016, 65, 190–204. [Google Scholar] [CrossRef]
- Meng, Q.; Yang, H. Benefit distribution and equity in road network design. Transp. Res. Part B Methodol. 2002, 36, 19–35. [Google Scholar] [CrossRef]
- Chow, J.; Regan, A. Network-based real option models. Transp. Res. Part B Methodol. 2011, 45, 682–695. [Google Scholar] [CrossRef]
- Bell, M.; Kurauchi, F.; Perera, S.; Wong, W. Investigating transport network vulnerability by capacity weighted spectral analysis. Transp. Res. Part B Methodol. 2017, 99, 251–266. [Google Scholar] [CrossRef]
- Hung, Y.; Michailidis, G. Stability and control of acyclic stochastic processing networks with shared resources. IEEE Trans. Autom. Control 2012, 57, 489–494. [Google Scholar] [CrossRef]











© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Bi, J.; Lu, C.; Ding, C. Route Guidance Strategies for Electric Vehicles by Considering Stochastic Charging Demands in a Time-Varying Road Network. Energies 2020, 13, 2287. https://doi.org/10.3390/en13092287
Wang Y, Bi J, Lu C, Ding C. Route Guidance Strategies for Electric Vehicles by Considering Stochastic Charging Demands in a Time-Varying Road Network. Energies. 2020; 13(9):2287. https://doi.org/10.3390/en13092287
Chicago/Turabian StyleWang, Yongxing, Jun Bi, Chaoru Lu, and Cong Ding. 2020. "Route Guidance Strategies for Electric Vehicles by Considering Stochastic Charging Demands in a Time-Varying Road Network" Energies 13, no. 9: 2287. https://doi.org/10.3390/en13092287
APA StyleWang, Y., Bi, J., Lu, C., & Ding, C. (2020). Route Guidance Strategies for Electric Vehicles by Considering Stochastic Charging Demands in a Time-Varying Road Network. Energies, 13(9), 2287. https://doi.org/10.3390/en13092287