
Analysis and Control of Battery Energy Storage System Based on Hybrid Active Third-Harmonic Current Injection Converter




Abstract
:1. Introduction
1.1. Background
1.2. Motivation
1.3. Related Work
1.4. Contribution of This Paper
2. Operation Principle and Mathematical Model of H3C-BESS
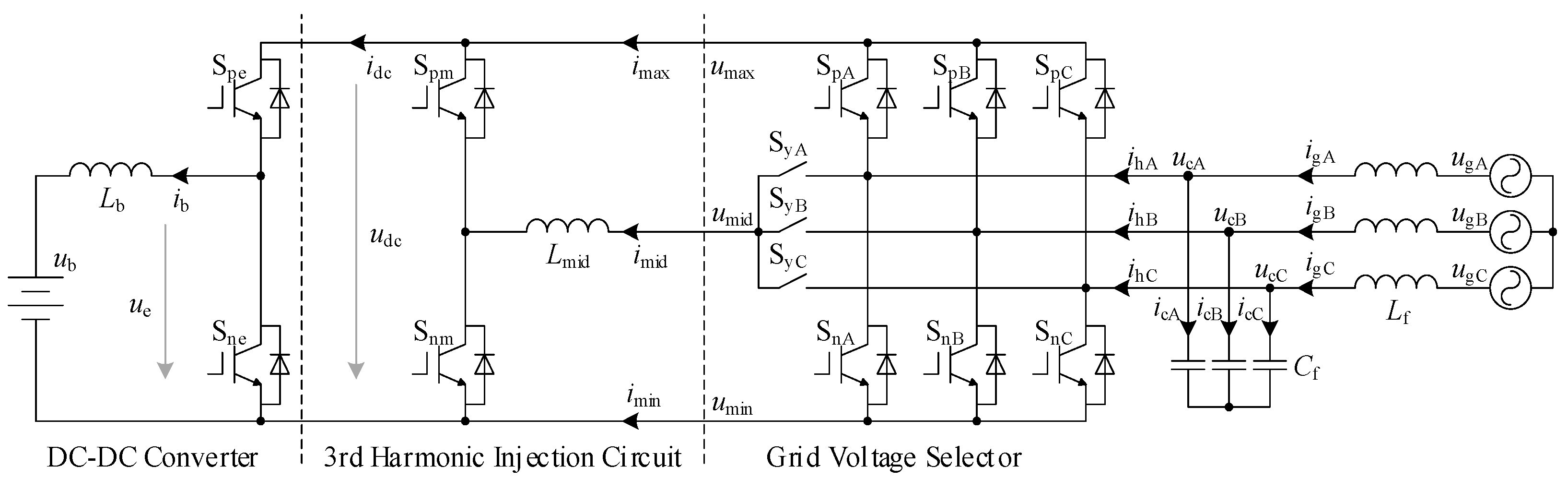
2.1. System Description
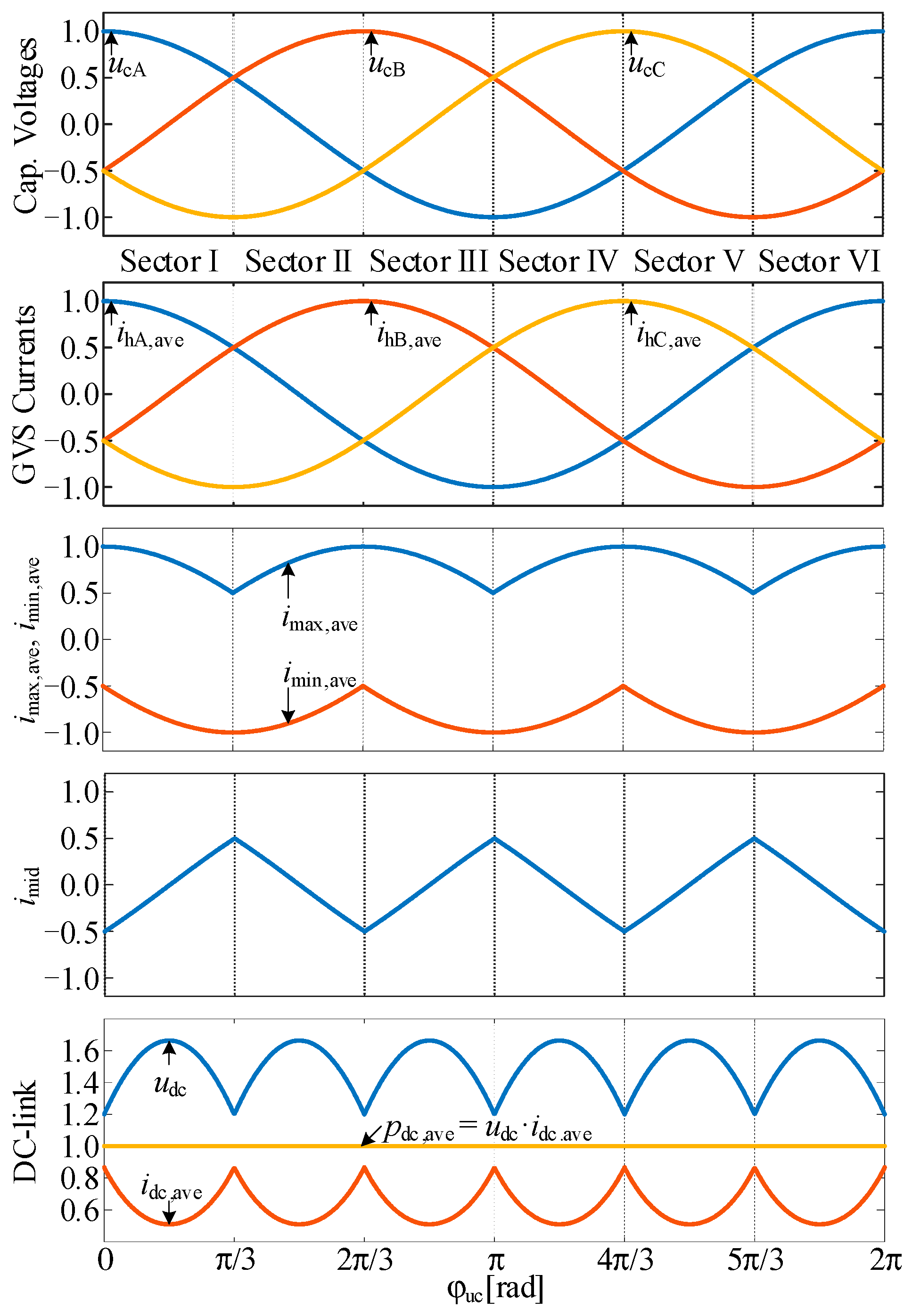
2.2. Operation Principles
2.3. Mathematical Model
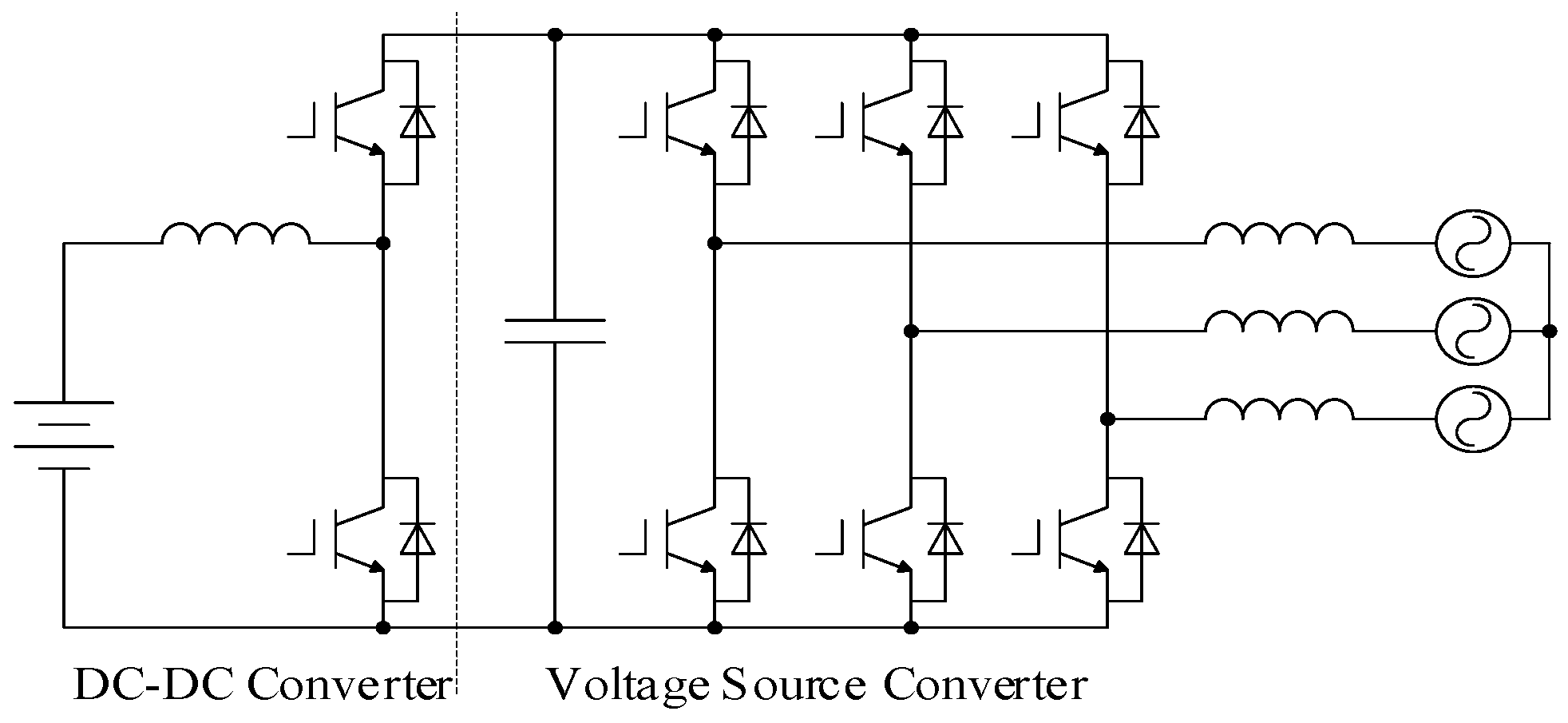
2.4. Comparison with Two-Stage VSC-BESS
- The H3C-BESS does not need large capacitors at the DC-link of H3C-BESS [21], while a bulky capacitor is required at the DC-link of VSC-BESS;
- The grid side filter of H3C-BESS is a second-order LC filter, which is also much smaller than the filter inductor of VSC-BESS [28];
- An additional inductor Lmid is required in H3C-BESS. However, the maximum current flowing through it is only half of the grid current amplitude, as shown in Figure 3;
- The H3C-BESS requires 14 transistors (each bidirectional switch requires two transistors in practice). The VSC-BESS requires only eight transistors.
- Under the same input voltage, battery voltage and current, the DC–DC converter in H3C-BESS generates less switching loss than H3C-BESS, because the DC-link voltage of H3C-BESS is smaller than H3C-BESS [21];
- The GVS part in H3C-BESS transfers the main power. However, the switching frequency is quite low, only the fundamental or twice the grid frequency. Compared with the VSC operating at high switching frequency, the switching loss generated by GVS is ignorable [23];
- Although the half-bridge in the harmonic injection circuit works in chopping mode, the maximum chopped current is only half of the grid current amplitude. Therefore, the generated switching loss is also very small [21].
3. Proposed Control Strategy for H3C-BESS
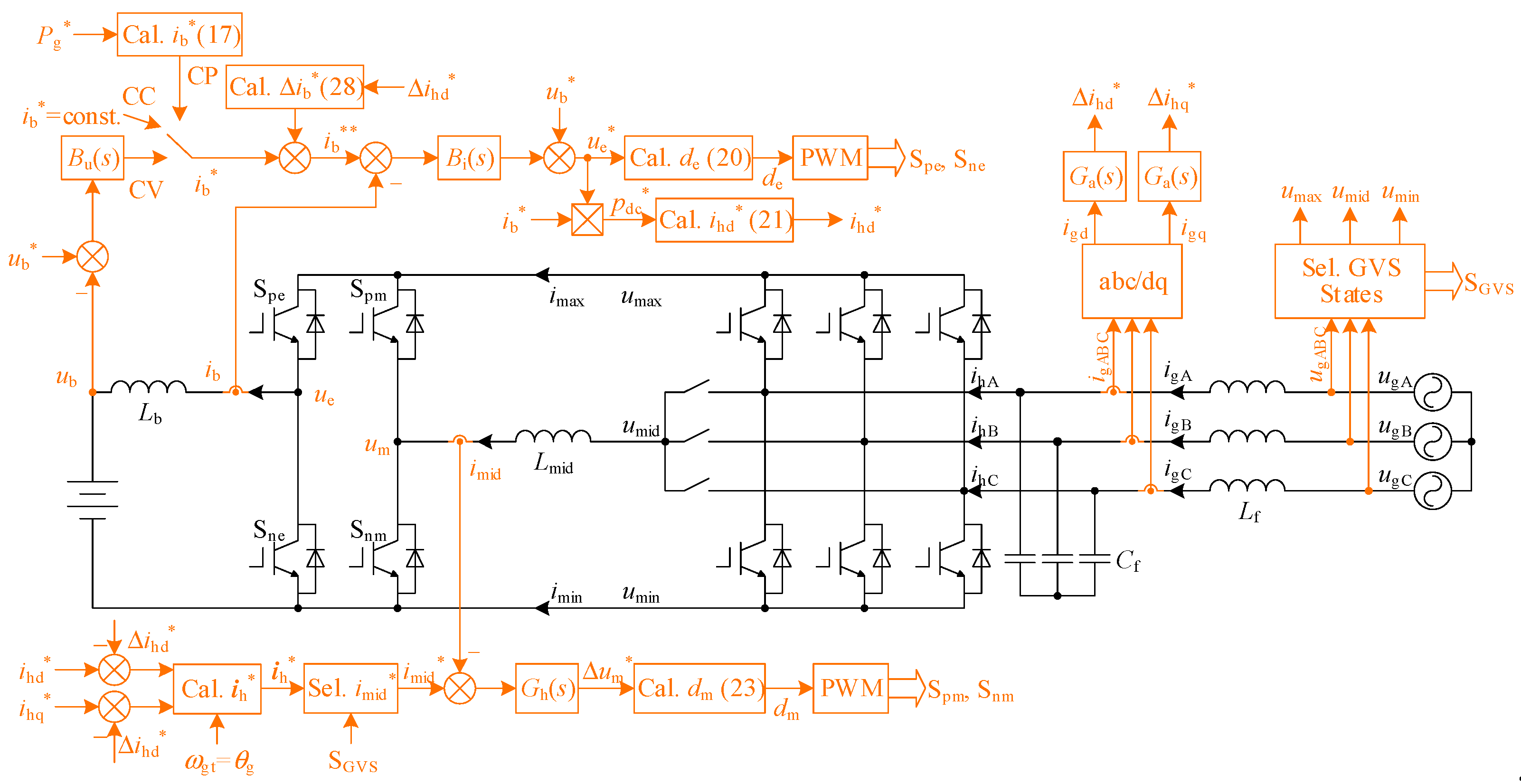
3.1. Control Block Diagram
3.2. Control of Battery Current and Voltage
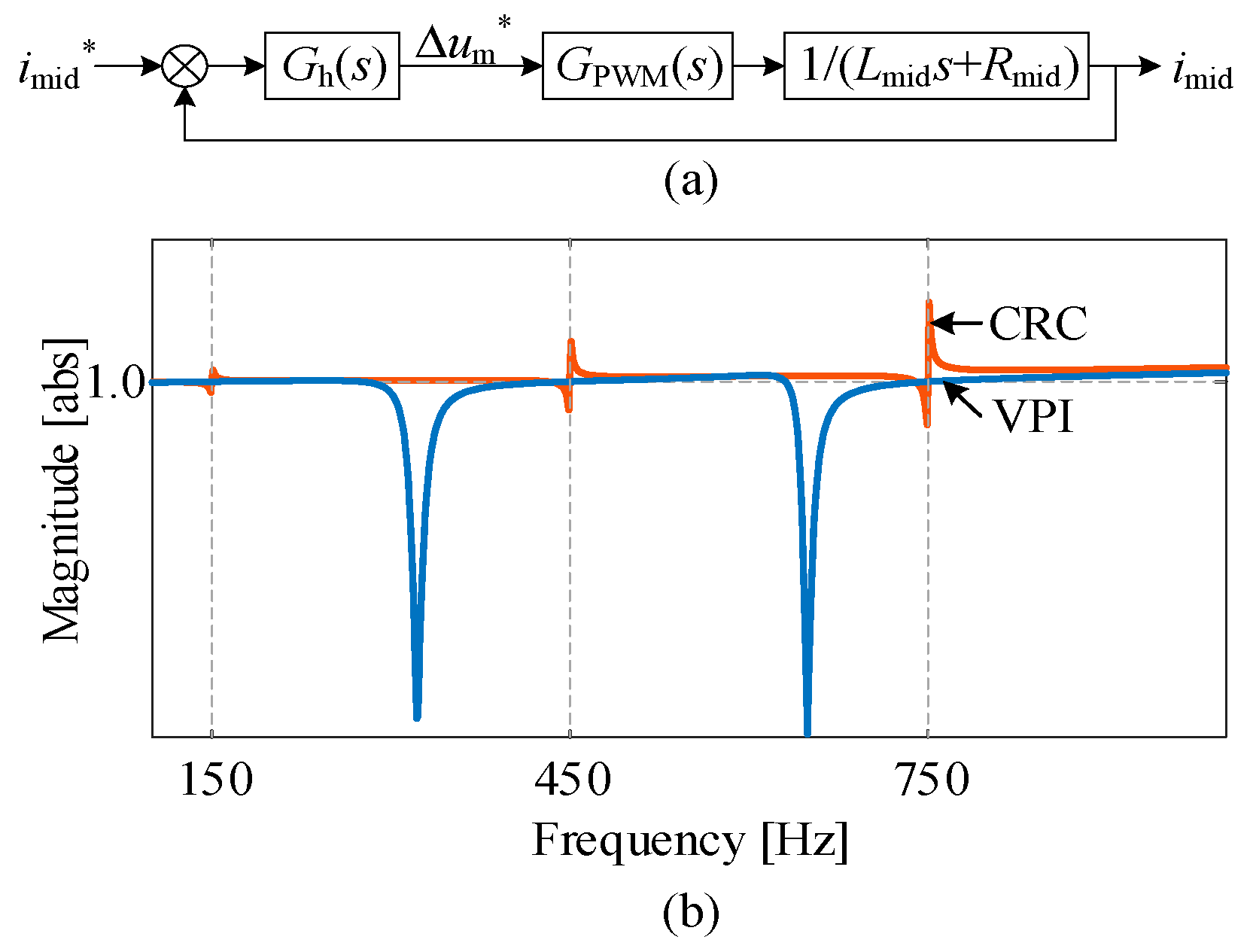
3.3. Control of Injected Harmonic Current
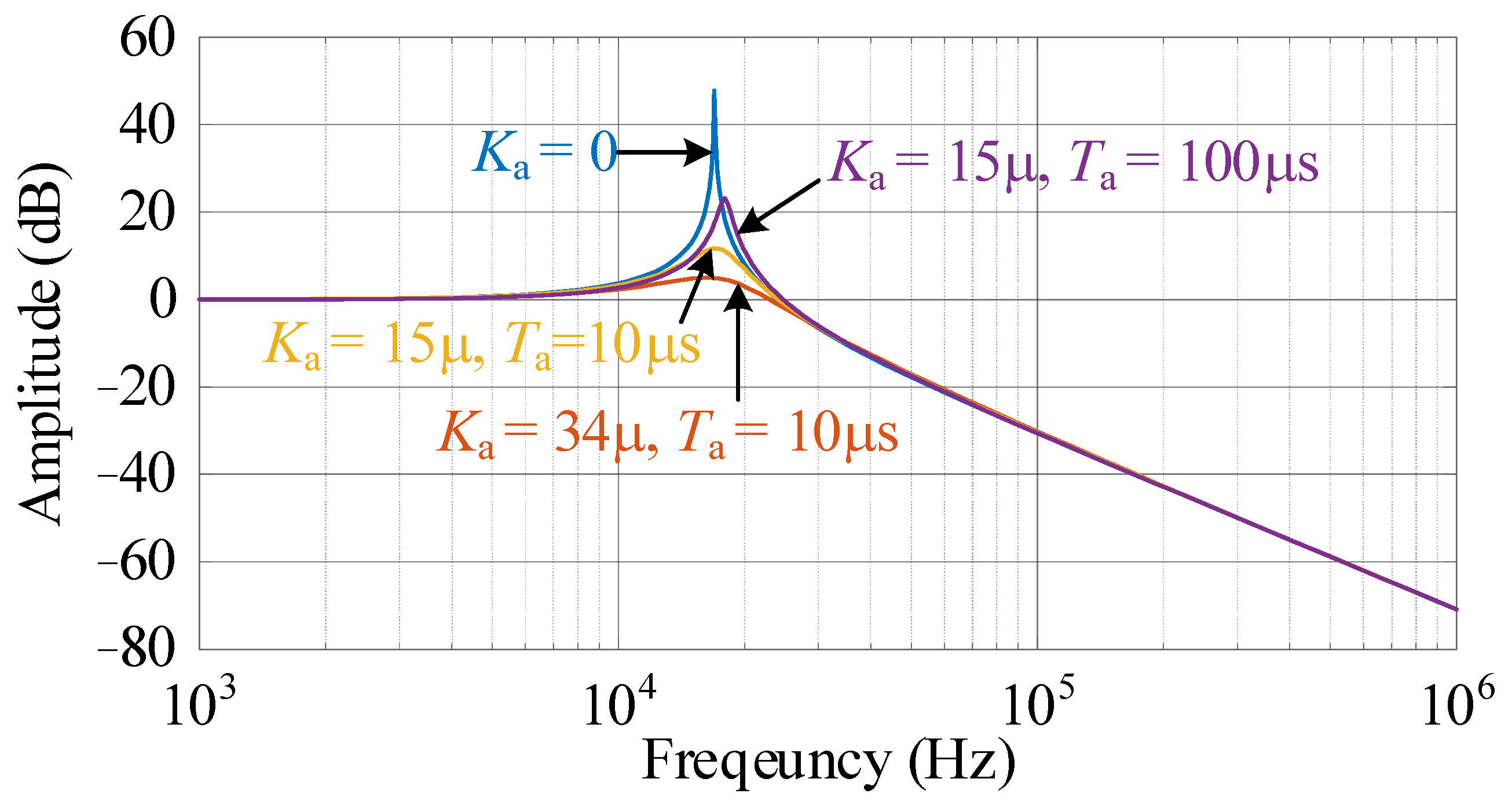
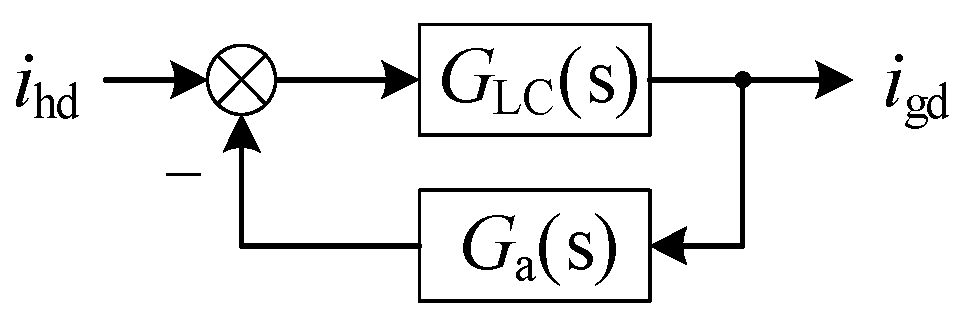
3.4. Active Damping Control
4. Simulation and Experimental Verification
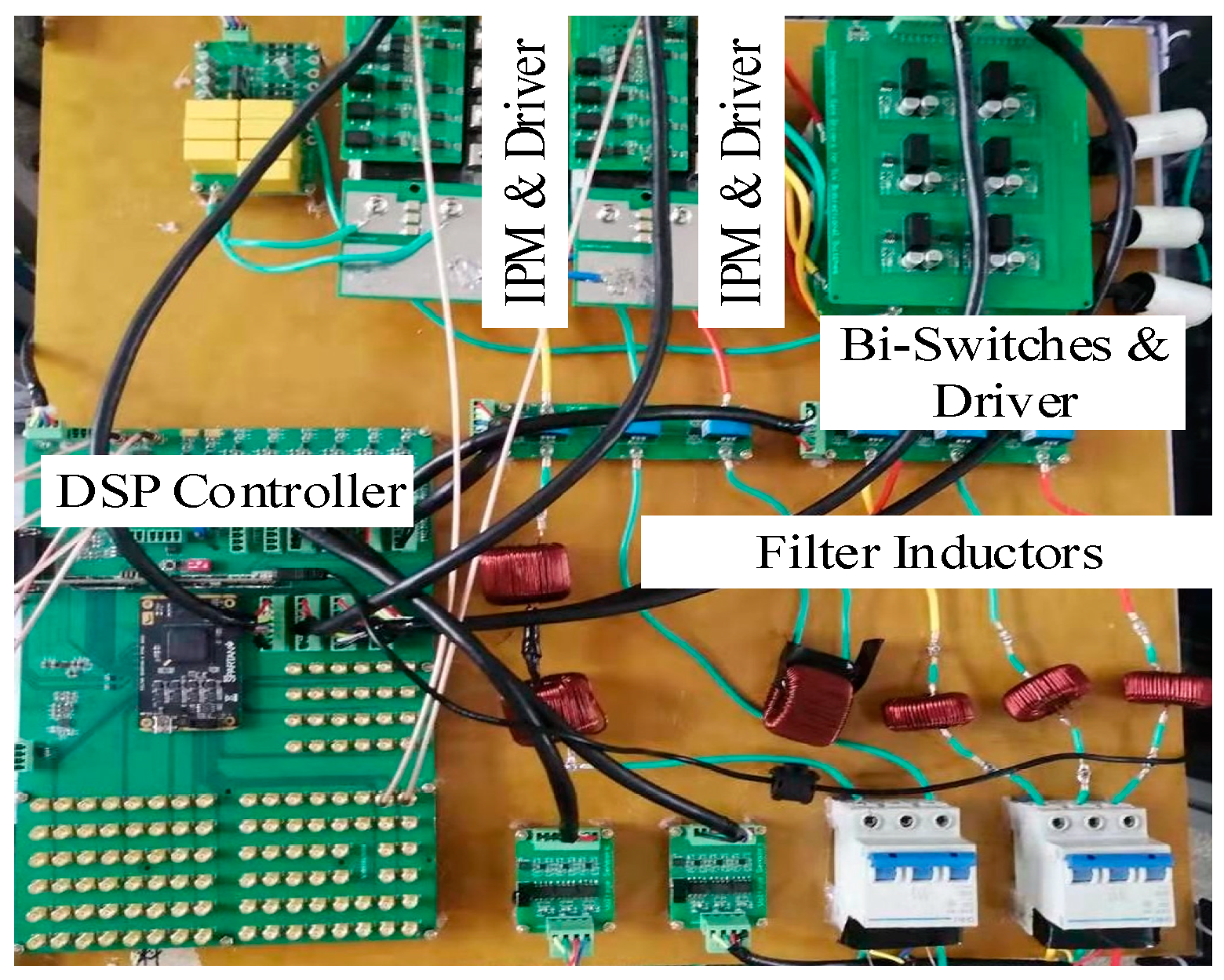
4.1. Prototype and Parameters
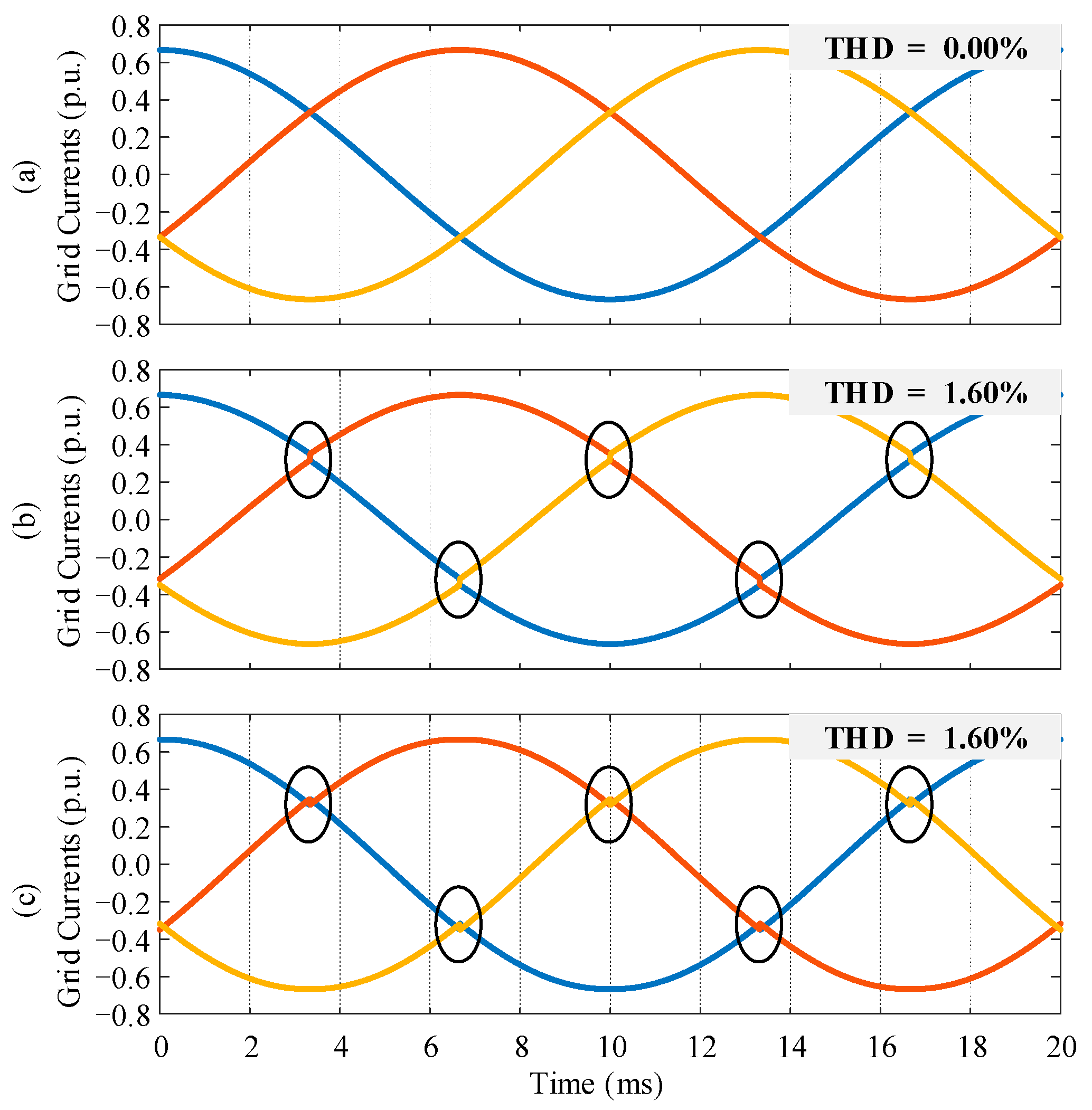
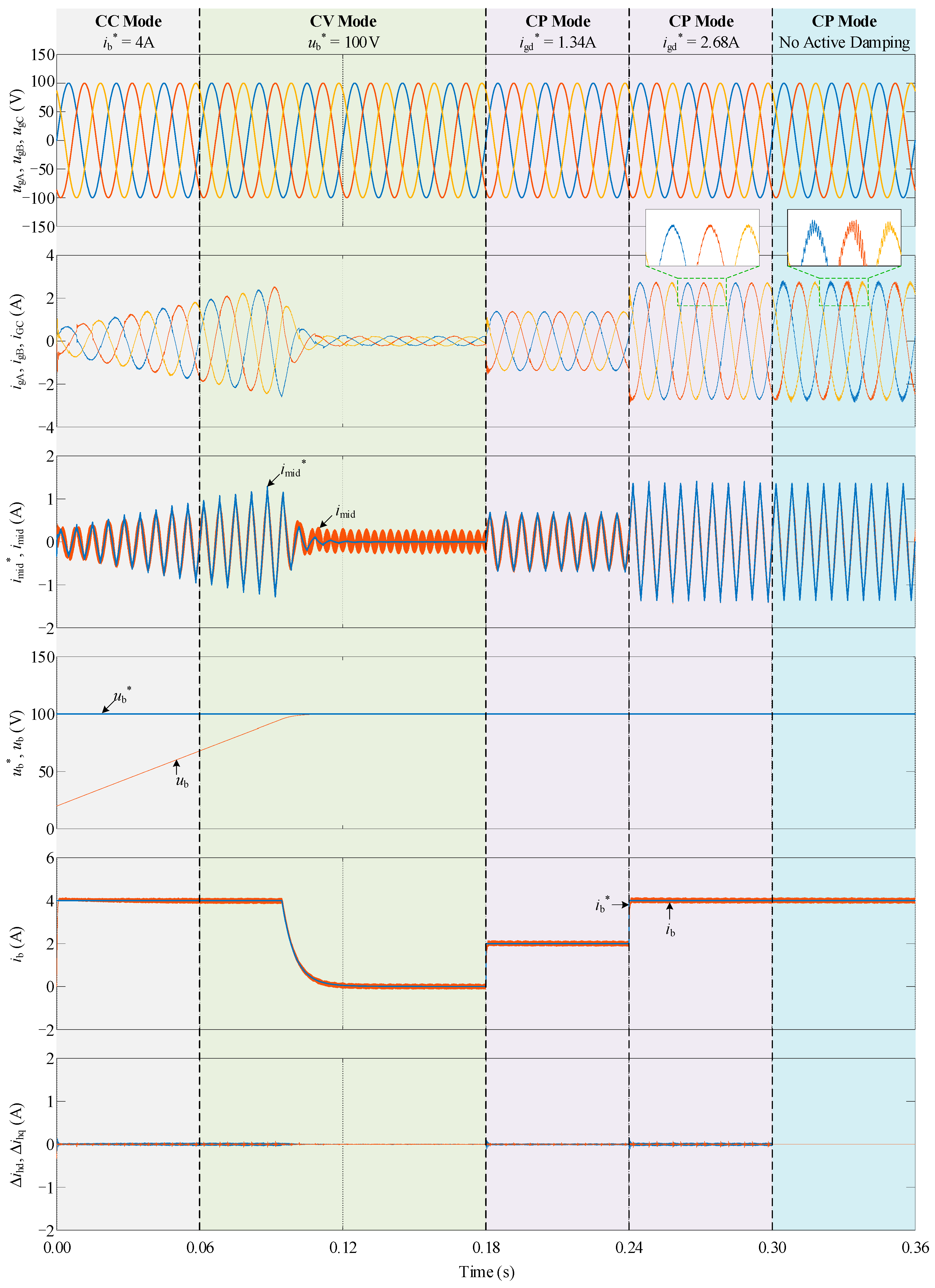
4.2. Simulation Results
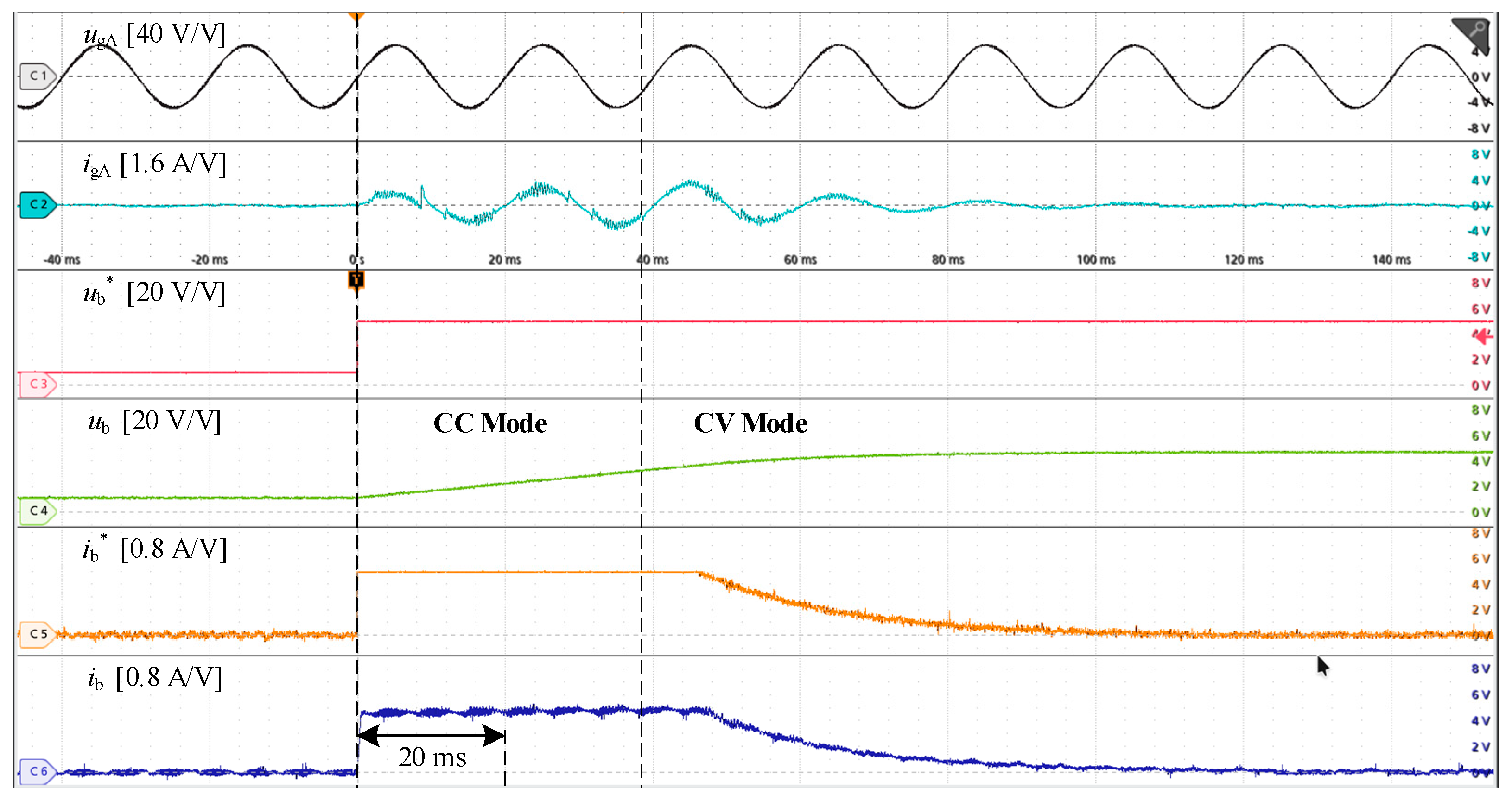
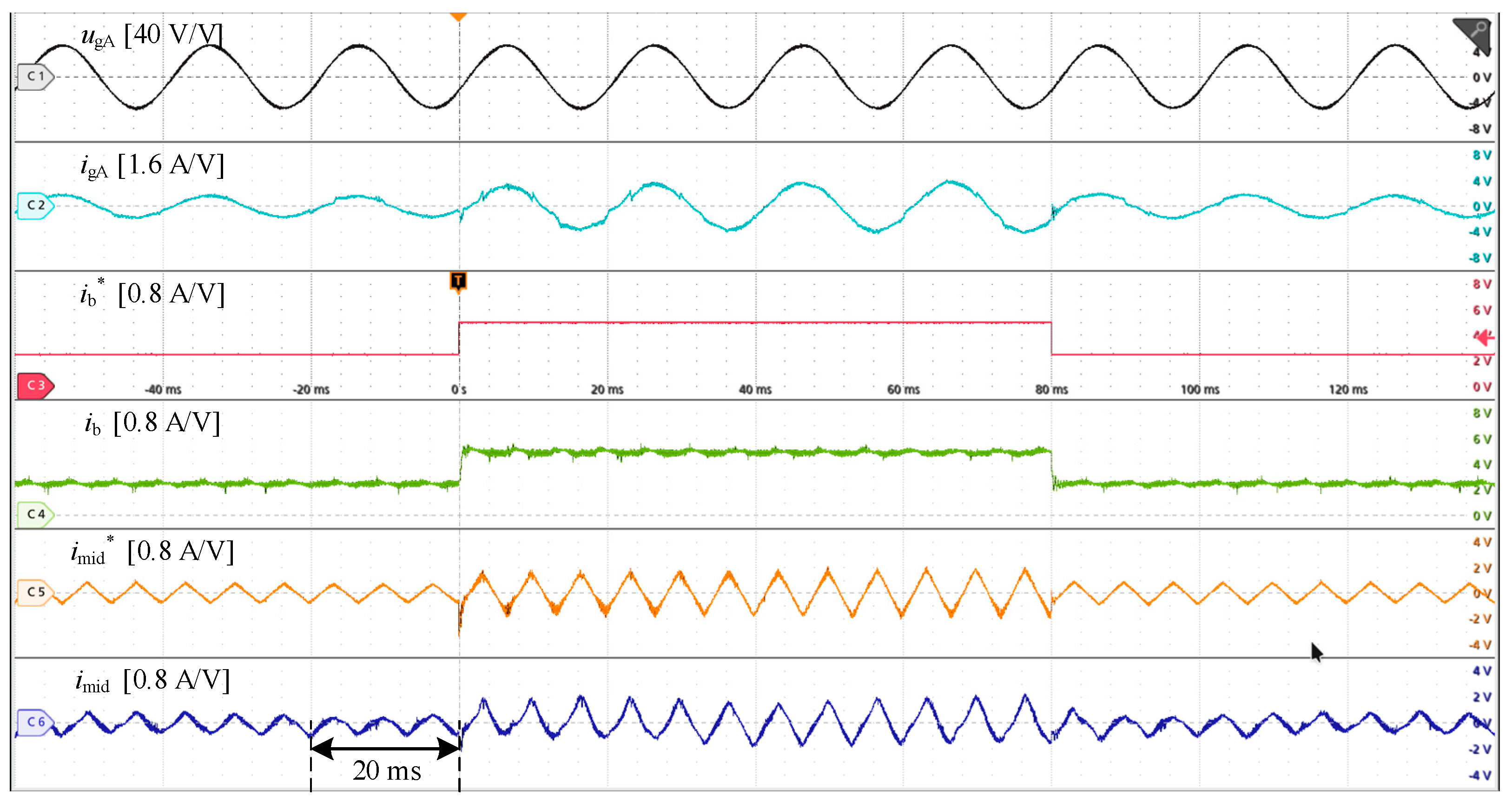
4.3. Experimental Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wei, S.; Zhou, Y.; Huang, Y. Synchronous Motor-Generator Pair to Enhance Small Signal and Transient Stability of Power System with High Penetration of Renewable Energy. IEEE Access 2017, 5, 11505–11512. [Google Scholar] [CrossRef]
- Aliabadi, S.F.; Taher, S.A.; Shahidehpour, M. Smart Deregulated Grid Frequency Control in Presence of Renewable Energy Resources by EVs Charging Control. IEEE Trans. Smart Grid 2018, 9, 1073–1085. [Google Scholar] [CrossRef]
- Azizivahed, A.; Arefi, A.; Ghavidel, S.; Shafie-Khah, M.; Li, L.; Zhang, J.; Catalao, J.P.S. Energy Management Strategy in Dynamic Distribution Network Reconfiguration Considering Renewable Energy Resources and Storage. IEEE Trans. Sustain. Energy 2020, 11, 662–673. [Google Scholar] [CrossRef]
- Zhu, Y.; Liu, C.; Sun, K.; Shi, D.; Wang, Z. Optimization of Battery Energy Storage to Improve Power System Oscillation Damping. IEEE Trans. Sustain. Energy 2019, 10, 1015–1024. [Google Scholar] [CrossRef] [Green Version]
- Faisal, M.; Hannan, M.A.; Ker, P.J.; Hussain, A.; Bin Mansor, M.; Blaabjerg, F. Review of Energy Storage System Technologies in Microgrid Applications: Issues and Challenges. IEEE Access 2018, 6, 35143–35164. [Google Scholar] [CrossRef]
- Stecca, M.; Elizondo, L.R.; Soeiro, T.; Bauer, P.; Palensky, P. A Comprehensive Review of the Integration of Battery Energy Storage Systems into Distribution Networks. IEEE Open J. Ind. Electron. Soc. 2020, 1, 1. [Google Scholar] [CrossRef]
- Vazquez, S.; Lukic, S.M.; Galvan, E.; Franquelo, L.G.; Carrasco, J.M. Energy Storage Systems for Transport and Grid Ap-plications. IEEE Trans. Ind. Electron. 2010, 57, 3881–3895. [Google Scholar] [CrossRef] [Green Version]
- Tan, N.M.L.; Abe, T.; Akagi, H. Design and Performance of a Bidirectional Isolated DC–DC Converter for a Battery Energy Storage System. IEEE Trans. Power Electron. 2012, 27, 1237–1248. [Google Scholar] [CrossRef]
- Chub, A.; Vinnikov, D.; Kosenko, R.; Liivik, E.; Galkin, I. Bidirectional DC–DC Converter for Modular Residential Battery Energy Storage Systems. IEEE Trans. Ind. Electron. 2020, 67, 1944–1955. [Google Scholar] [CrossRef]
- Lo, K.-Y.; Chen, Y.-M.; Chang, Y.-R. Bidirectional Single-Stage Grid-Connected Inverter for a Battery Energy Storage System. IEEE Trans. Ind. Electron. 2017, 64, 4581–4590. [Google Scholar] [CrossRef]
- Jayasinghe SD, G.; Vilathgamuwa, D.M.; Madawala, U.K. Diode-Clamped Three-Level Inverter-Based Bat-tery/Supercapacitor Direct Integration Scheme for Renewable Energy Systems. IEEE Trans. Power Electron. 2011, 26, 3720–3729. [Google Scholar] [CrossRef]
- Maharjan, L.; Inoue, S.; Akagi, H.; Asakura, J. State-of-Charge (SOC)-Balancing Control of a Battery Energy Storage System Based on a Cascade PWM Converter. IEEE Trans. Power Electron. 2009, 24, 1628–1636. [Google Scholar] [CrossRef]
- Maharjan, L.; Yamagishi, T.; Akagi, H. Active-Power Control of Individual Converter Cells for a Battery Energy Storage System Based on a Multilevel Cascade PWM Converter. IEEE Trans. Power Electron. 2012, 27, 1099–1107. [Google Scholar] [CrossRef]
- Li, Z.; Lizana, R.; Lukic, S.M.; Peterchev, A.V.; Goetz, S.M. Current Injection Methods for Ripple-Current Suppression in Delta-Configured Split-Battery Energy Storage. IEEE Trans. Power Electron. 2018, 34, 7411–7421. [Google Scholar] [CrossRef]
- Chen, Q.; Li, R.; Cai, X. Analysis and Fault Control of Hybrid Modular Multilevel Converter with Integrated Battery Energy Storage System. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 64–78. [Google Scholar] [CrossRef]
- Li, N.; Gao, F.; Hao, T.; Ma, Z.; Zhang, C. SOH Balancing Control Method for the MMC Battery Energy Storage System. IEEE Trans. Ind. Electron. 2018, 65, 6581–6591. [Google Scholar] [CrossRef]
- Zeng, W.; Li, R.; Cai, X. A New Hybrid Modular Multilevel Converter with Integrated Energy Storage. IEEE Access 2019, 7, 172981–172993. [Google Scholar] [CrossRef]
- Judge, P.D.; Green, T.C. Modular Multilevel Converter with Partially Rated Integrated Energy Storage Suitable for Frequency Support and Ancillary Service Provision. IEEE Trans. Power Deliv. 2019, 34, 208–219. [Google Scholar] [CrossRef]
- Feng, B.; Lin, H.; Wang, X. Modulation and control of ac/dc matrix converter for battery energy storage application. IET Power Electron. 2015, 8, 1583–1594. [Google Scholar] [CrossRef]
- Varajao, D.; Araujo, R.E.; Miranda, L.M.; Lopes, J.A.P. Modulation Strategy for a Single-Stage Bidirectional and Isolated AC–DC Matrix Converter for Energy Storage Systems. IEEE Trans. Ind. Electron. 2018, 65, 3458–3468. [Google Scholar] [CrossRef]
- Soeiro, T.B.; Vancu, F.; Kolar, J.W. Hybrid Active Third-Harmonic Current Injection Mains Interface Concept for DC Dis-tribution Systems. IEEE Trans. Power Electron. 2013, 28, 7–13. [Google Scholar] [CrossRef]
- Schrittwieser, L.; Kolar, J.W.; Soeiro, T. 99% efficient three-phase buck-type SiC MOSFET PFC rectifier minimizing life cycle cost in DC data centers. CPSS Trans. Power Electron. Appl. 2016, 2, 1–8. [Google Scholar] [CrossRef]
- Wang, H.; Su, M.; Sun, Y.; Yang, J.; Zhang, G.; Gui, W.; Feng, J. Two-Stage Matrix Converter Based on Third-Harmonic In-jection Technique. IEEE Trans. Power Electron. 2016, 31, 533–547. [Google Scholar] [CrossRef]
- Wang, L.; Wang, H.; Su, M.; Sun, Y.; Yang, J.; Dong, M.; Li, X.; Gui, W.; Feng, J. A Three-Level T-Type Indirect Matrix Converter Based on the Third-Harmonic Injection Technique. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 841–853. [Google Scholar] [CrossRef]
- Wang, H.; Su, M.; Sun, Y.; Zhang, G.; Yang, J.; Gui, W.; Feng, J. Topology and Modulation Scheme of a Three-Level Third-Harmonic Injection Indirect Matrix Converter. IEEE Trans. Ind. Electron. 2017, 64, 7612–7622. [Google Scholar] [CrossRef]
- Zhang, G.; Wang, H.; Zhang, C. Modulated Model Predictive Control for 3TSMC. In Proceedings of the Energy Conversion Congress and Exposition (ECCE) 2020 IEEE, Detroit, MI, USA, 15–11 October 2020; pp. 4173–4177. [Google Scholar]
- Lei, J.; Zhou, B.; Qin, X.; Wei, J.; Bian, J. Active damping control strategy of matrix converter via modifying input reference currents. IEEE Trans. Power Electron. 2015, 30, 5260–5271. [Google Scholar] [CrossRef]
- Yagnik, U.P.; Solanki, M.D. Comparison of L, LC & LCL filter for grid connected converter. In Proceedings of the 2017 International Conference on Trends in Electronics and Informatics (ICEI), Tirunelveli, India, 11–12 May 2017; pp. 455–458. [Google Scholar]
- Jankovic, M.; Darijevic, M.; Pejovic, P.; Kolar, J.W.; Nishida, Y. Hybrid three-phase rectifier with switched current injection device. In Proceedings of the 2012 15th International Power Electronics and Motion Control Conference (EPE/PEMC), Novi Sad, Serbia, 4–6 September 2012; pp. LS3e.2-1–LS3e.2-7. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sector | On Switches | umax | umid | umin | ihA | ihB | ihC | ||
|---|---|---|---|---|---|---|---|---|---|
| I | SpA | SyB | SnC | ucA | ucB | ucC | imax | imid | imin |
| II | SyA | SpB | SnC | ucB | ucA | ucC | imid | imax | imin |
| III | SnA | SpB | SyC | ucB | ucC | ucA | imin | imax | imid |
| IV | SnA | SyB | SpC | ucC | ucB | ucA | imin | imid | imax |
| V | SyA | SnB | SpC | ucC | ucA | ucB | imid | imin | imax |
| VI | SpA | SnB | SyC | ucA | ucC | ucB | imax | imin | imid |
| Variables | Description | Values |
|---|---|---|
| Ugm | Grid Voltage Amplitude | 100 V |
| fg | Grid Frequency | 50 Hz |
| Lf | Grid Filter Inductor | 0.5 mH |
| Rf | Resistance of Lf | 35 mΩ |
| Cf | Grid Filter Capacitor | 6.9 μF |
| Lmid | Filter Inductor of Third Harmonic Circuit | 2.5 mH |
| Rmid | Resistance of Lmid | 150 mΩ |
| Lb | Battery Filter Inductor | 4.9 mH |
| Rb | Resistance of Lb | 135 mΩ |
| Ub | Normal Battery Voltage | 100 V |
| Cb | Equivalent Capacitance | 5 mF |
| Ka | Gain of Active Damping Controller | 15 μ |
| Ta | Time Constant of Active Damping Controller | 10 μs |
| Fs | Switching Frequency of Chopping Switches | 16 kHz |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tao, Y.; Lei, J.; Feng, X.; Cao, T.; Hu, Q.; Chen, W. Analysis and Control of Battery Energy Storage System Based on Hybrid Active Third-Harmonic Current Injection Converter. Energies 2021, 14, 3140. https://doi.org/10.3390/en14113140
Tao Y, Lei J, Feng X, Cao T, Hu Q, Chen W. Analysis and Control of Battery Energy Storage System Based on Hybrid Active Third-Harmonic Current Injection Converter. Energies. 2021; 14(11):3140. https://doi.org/10.3390/en14113140
Chicago/Turabian StyleTao, Yibin, Jiaxing Lei, Xinzhen Feng, Tianzhi Cao, Qinran Hu, and Wu Chen. 2021. "Analysis and Control of Battery Energy Storage System Based on Hybrid Active Third-Harmonic Current Injection Converter" Energies 14, no. 11: 3140. https://doi.org/10.3390/en14113140
APA StyleTao, Y., Lei, J., Feng, X., Cao, T., Hu, Q., & Chen, W. (2021). Analysis and Control of Battery Energy Storage System Based on Hybrid Active Third-Harmonic Current Injection Converter. Energies, 14(11), 3140. https://doi.org/10.3390/en14113140