
A Novel Hybrid GWO-LS Estimator for Harmonic Estimation Problem in Time Varying Noisy Environment



 and
and
Abstract
:1. Introduction
- A novel Grey Wolf Optimizer (GWO) and LS-based hybrid estimator is proposed for accurate estimation of harmonics in EPS.
- The proposed GWO-LS has the ability to cope with HE problems timely in the modern dynamic and complex smart grid/system.
- GWO is utilized for accurate estimation of non-linear part, and LS is used for accurate estimation of the linear part of HE problems.
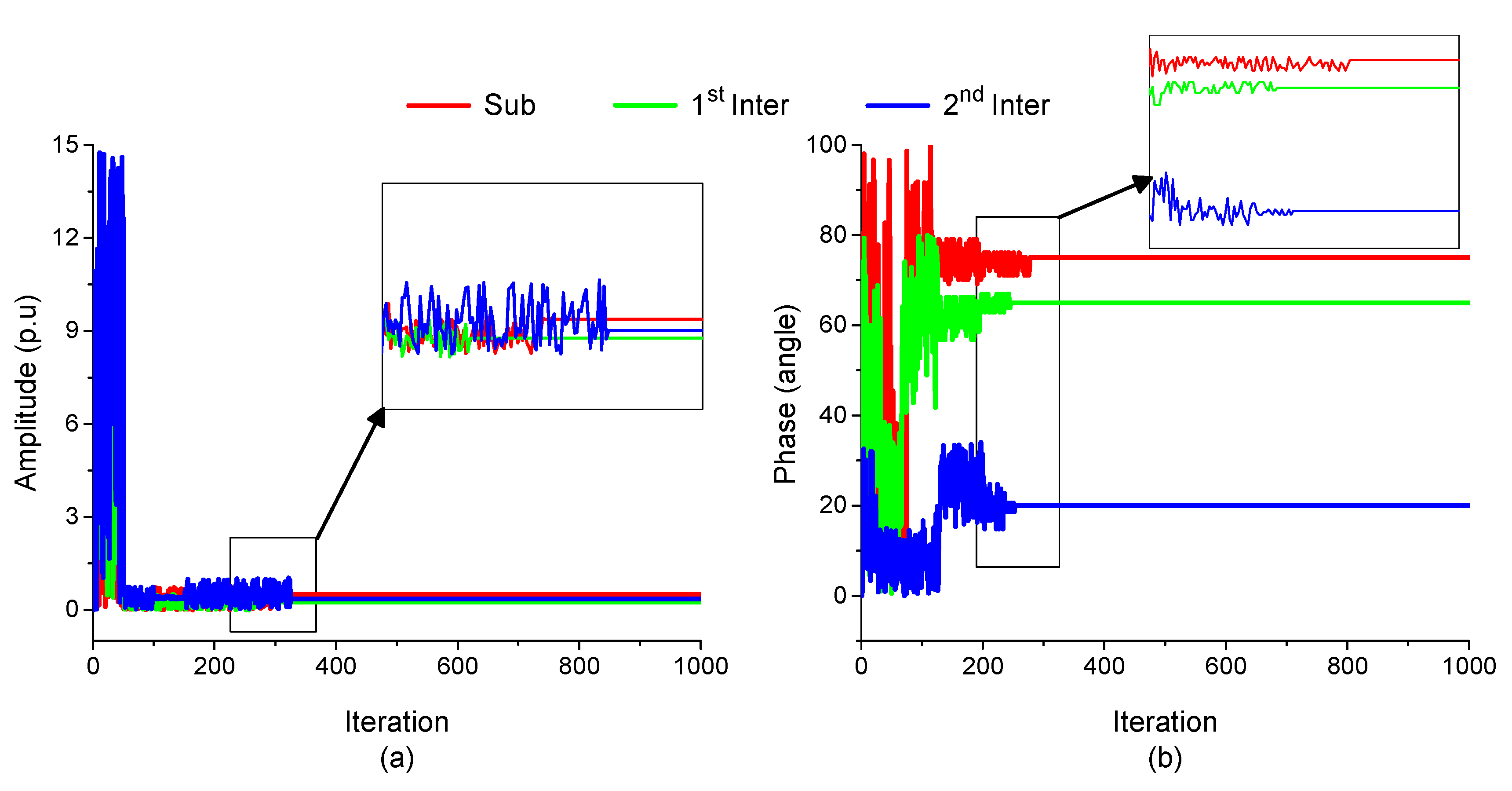
- GWO is also utilized for the accurate estimation of frequency components of integral, sub, and inter harmonics.
- The transient analysis of the case studies is done to ascertain the effectiveness of the proposed GWO-LS harmonic estimator.
- The proposed harmonic estimator performed better in dynamic and noisy signals, reduces complexity level, and improves the presented harmonic estimator’s computational efficiency and accuracy.
- The effectiveness of the proposed estimator is evaluated on standard test systems used by various researchers.
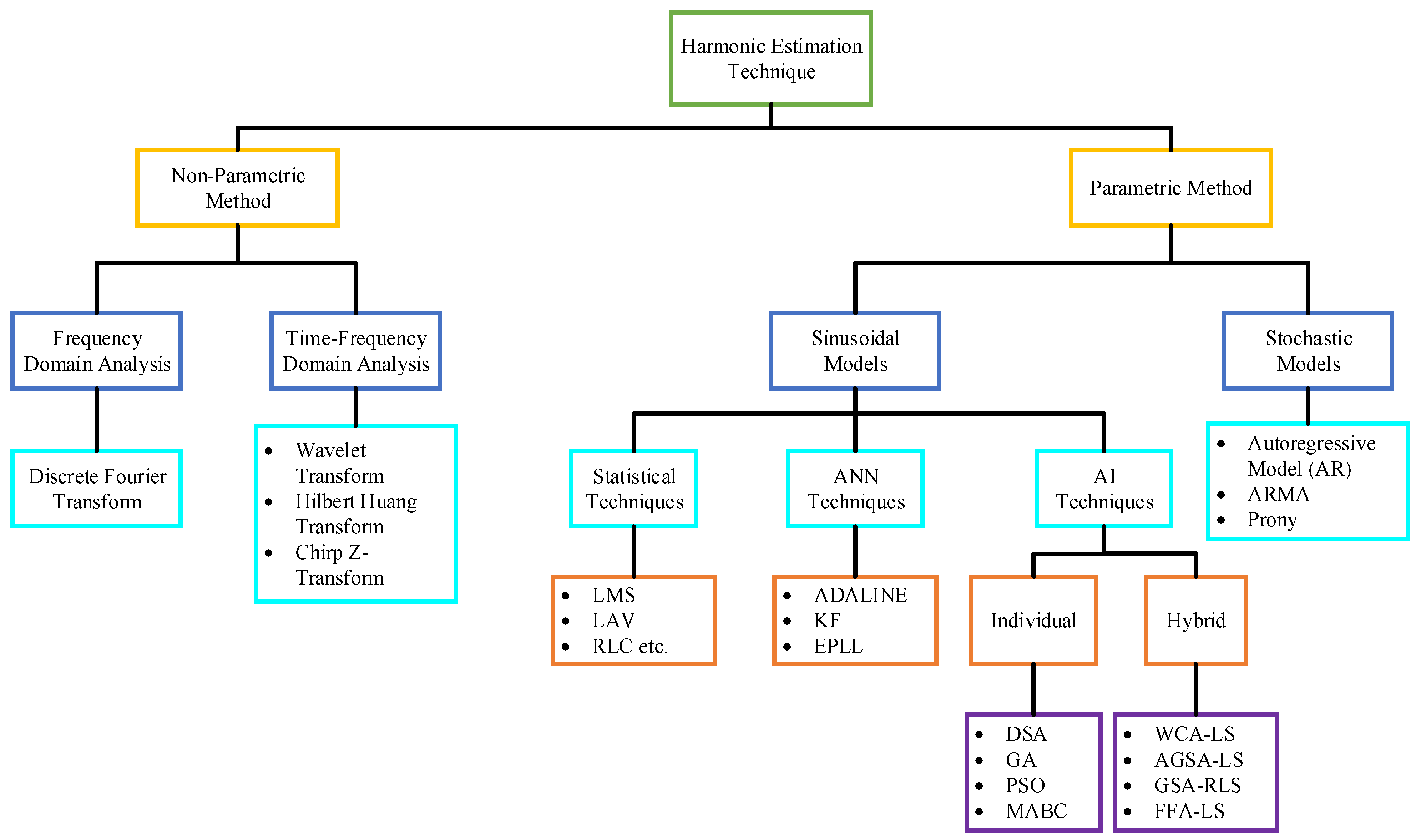
2. Problem Formulation of Harmonic Estimation
3. Proposed Methodology
3.1. Grey Wolf Optimizer
3.2. Hybrid GWO-LS Harmonic Estimator
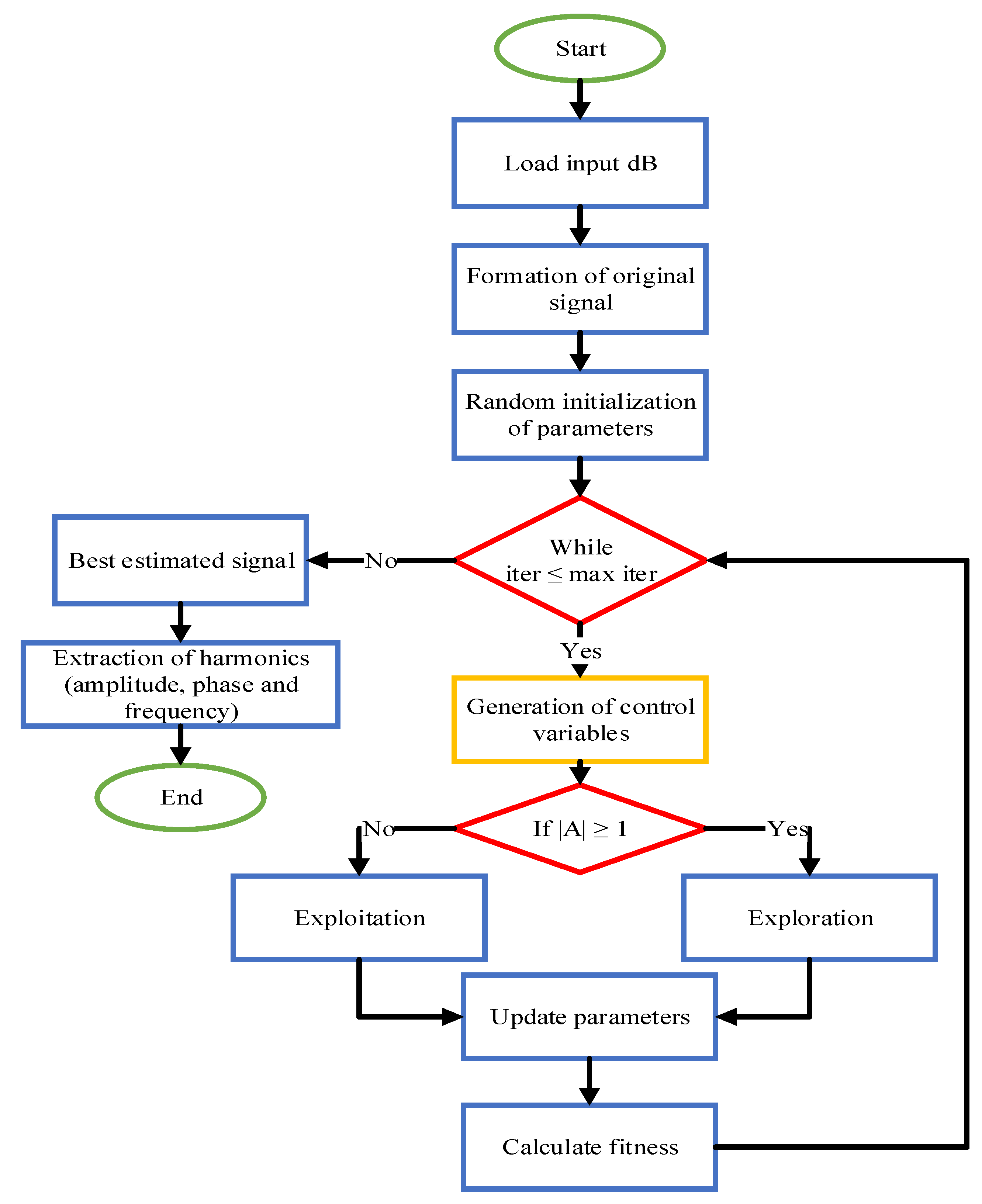
3.3. Computational Procedure
- Load input database.
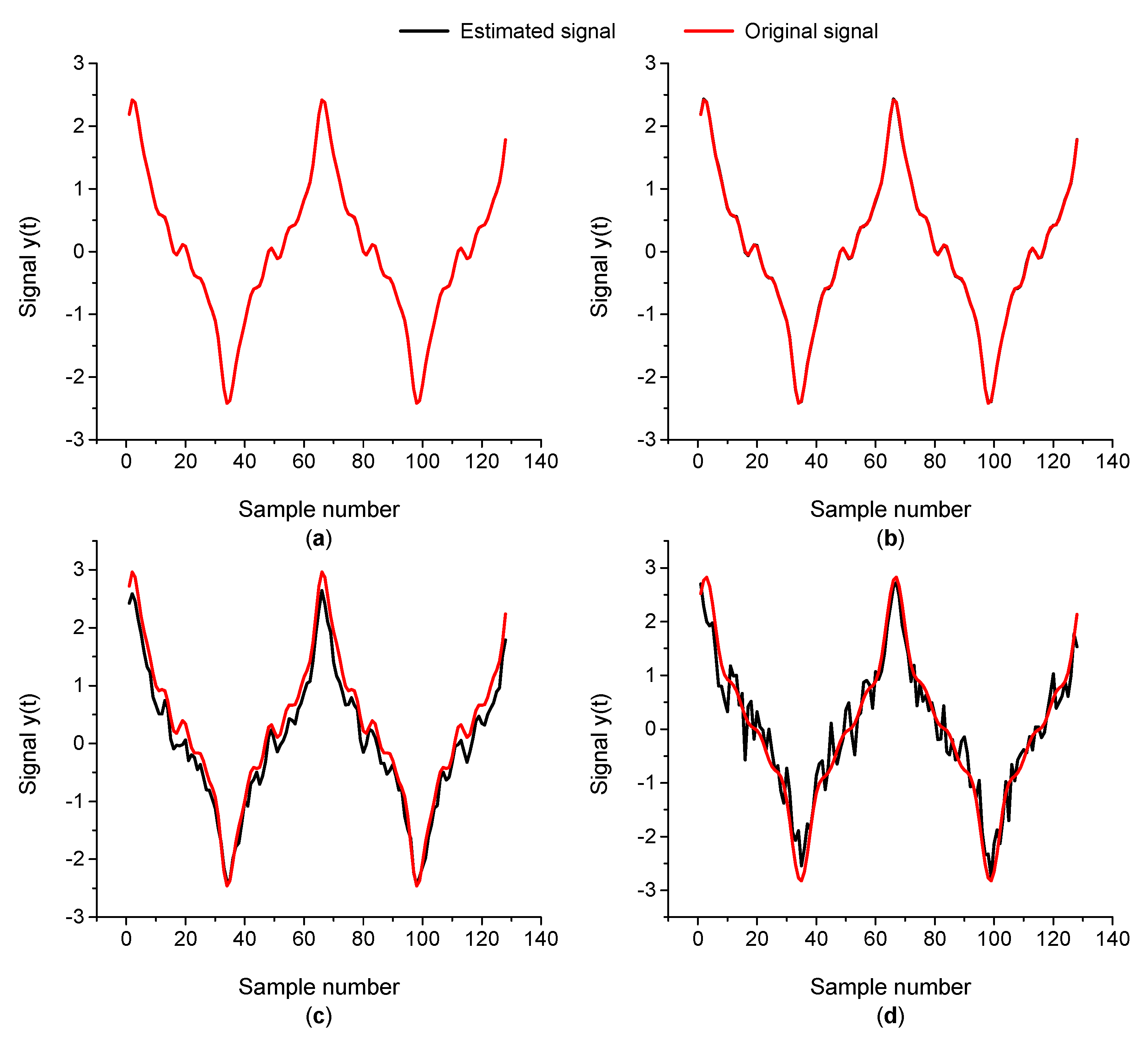
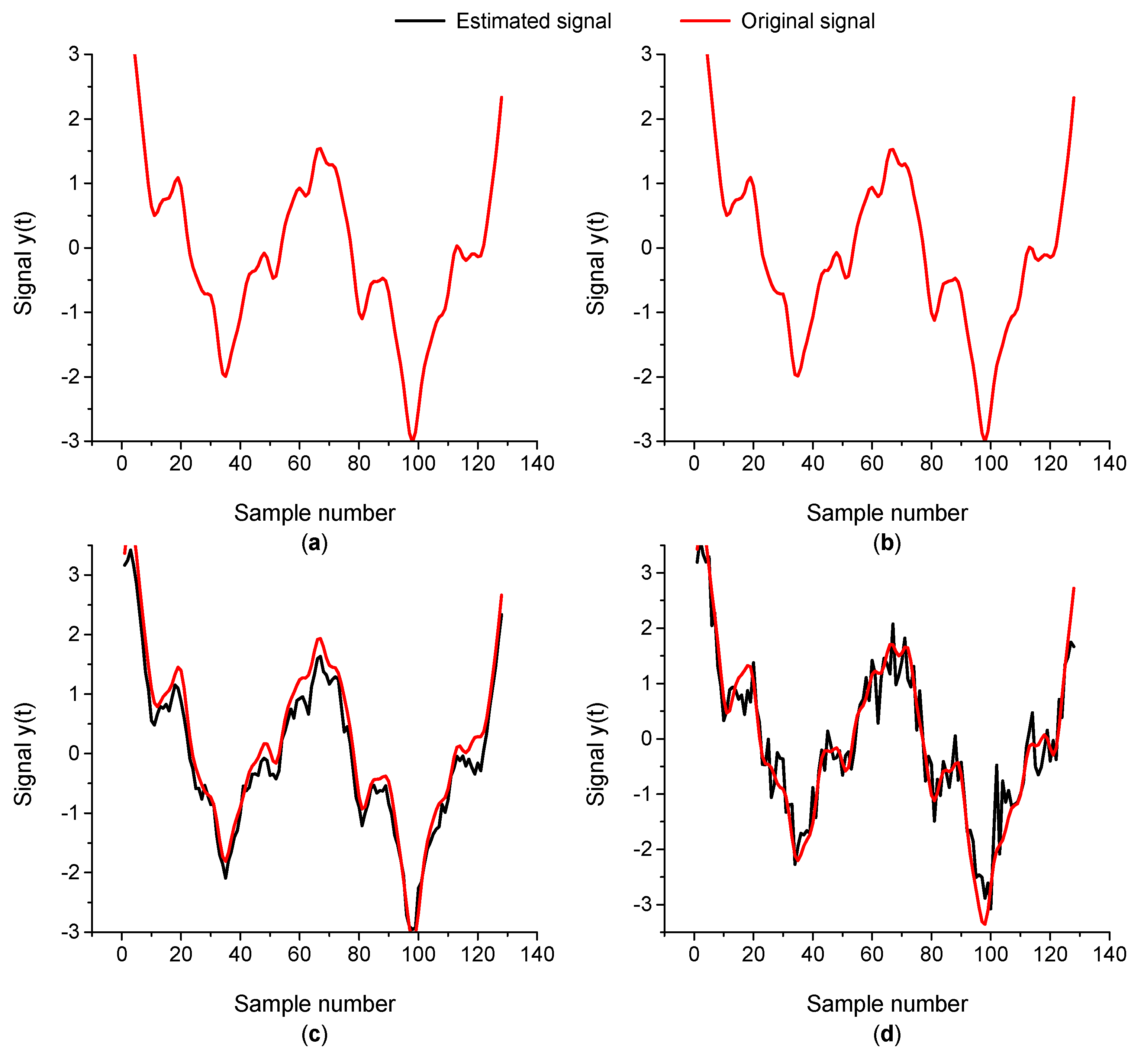
- A signal named “original signal” is formulated by utilizing an input database.
- Initialization of HE and GWO-LS parameters.
- GWO-LS is applied for updating unknown parameters.
- Formation of estimated signal by updated parameters.
- Comparison of the original signal and estimated signal to evaluate objective function (MSE).
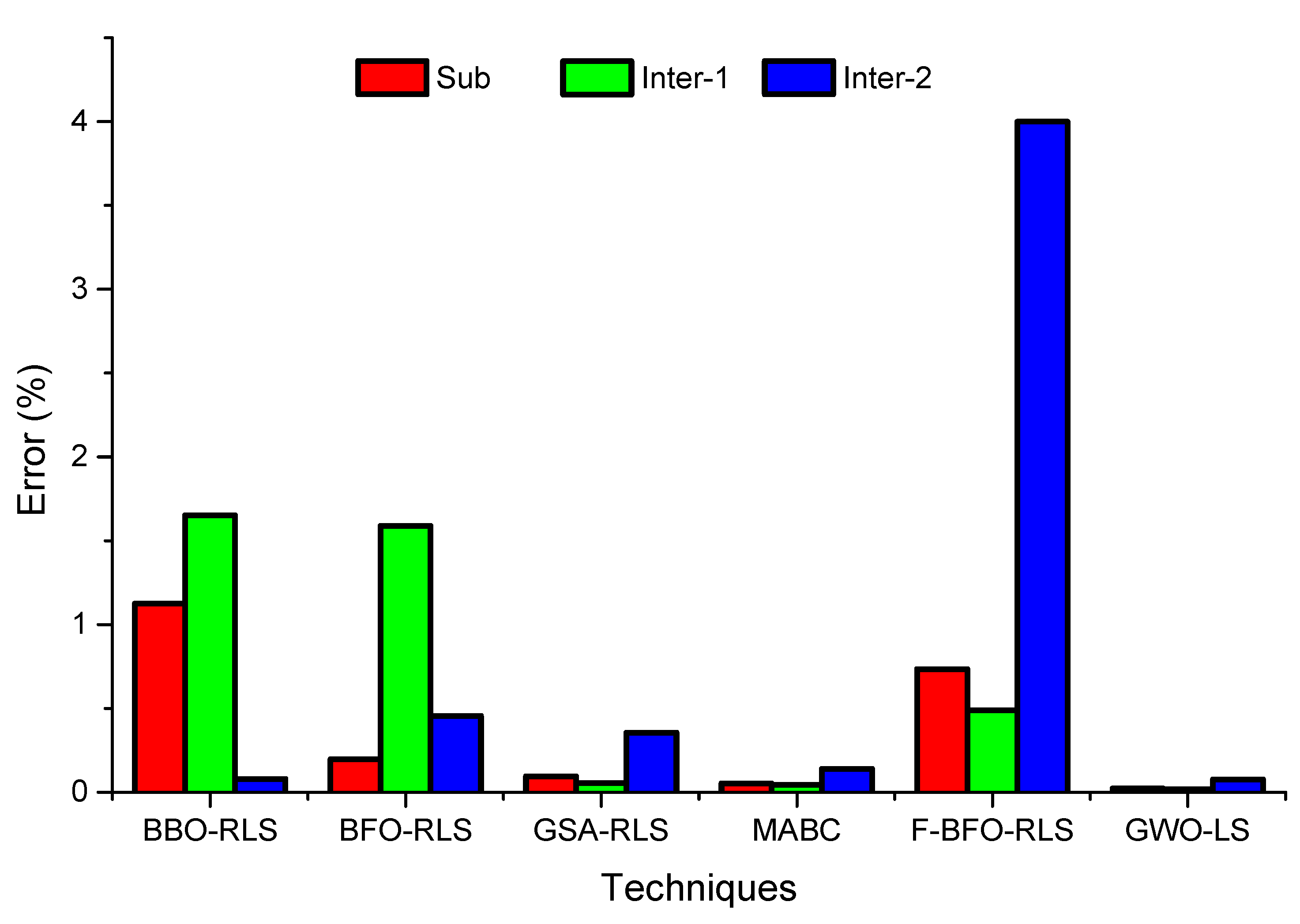
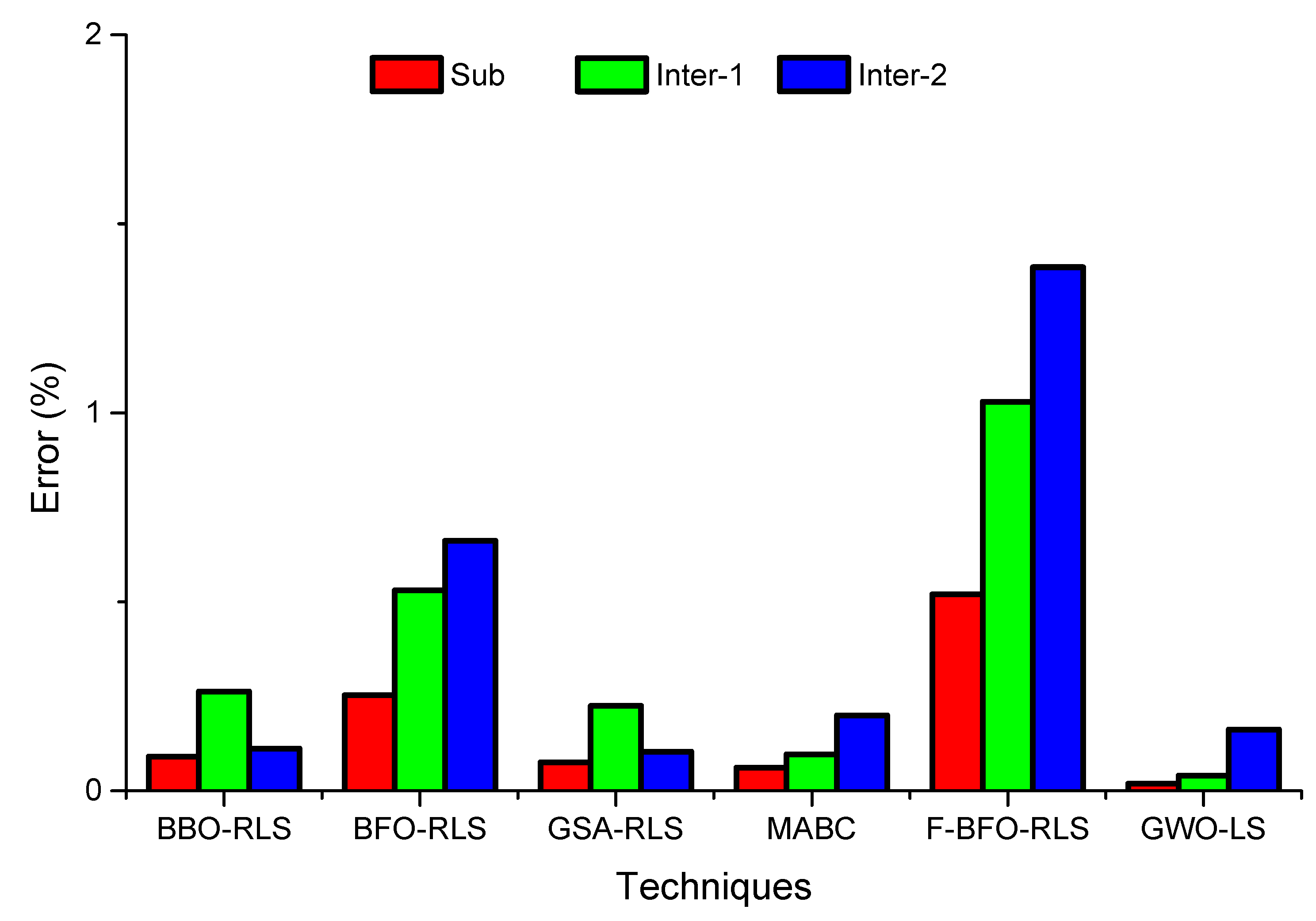
4. Simulation Results and Discussion
- Test System I: Estimating integral harmonics without including Sub and Inter harmonics in time-varying noisy environments.
- Test System II: Estimation of integral harmonics including Sub and Inter harmonics in a time-varying noisy environment.
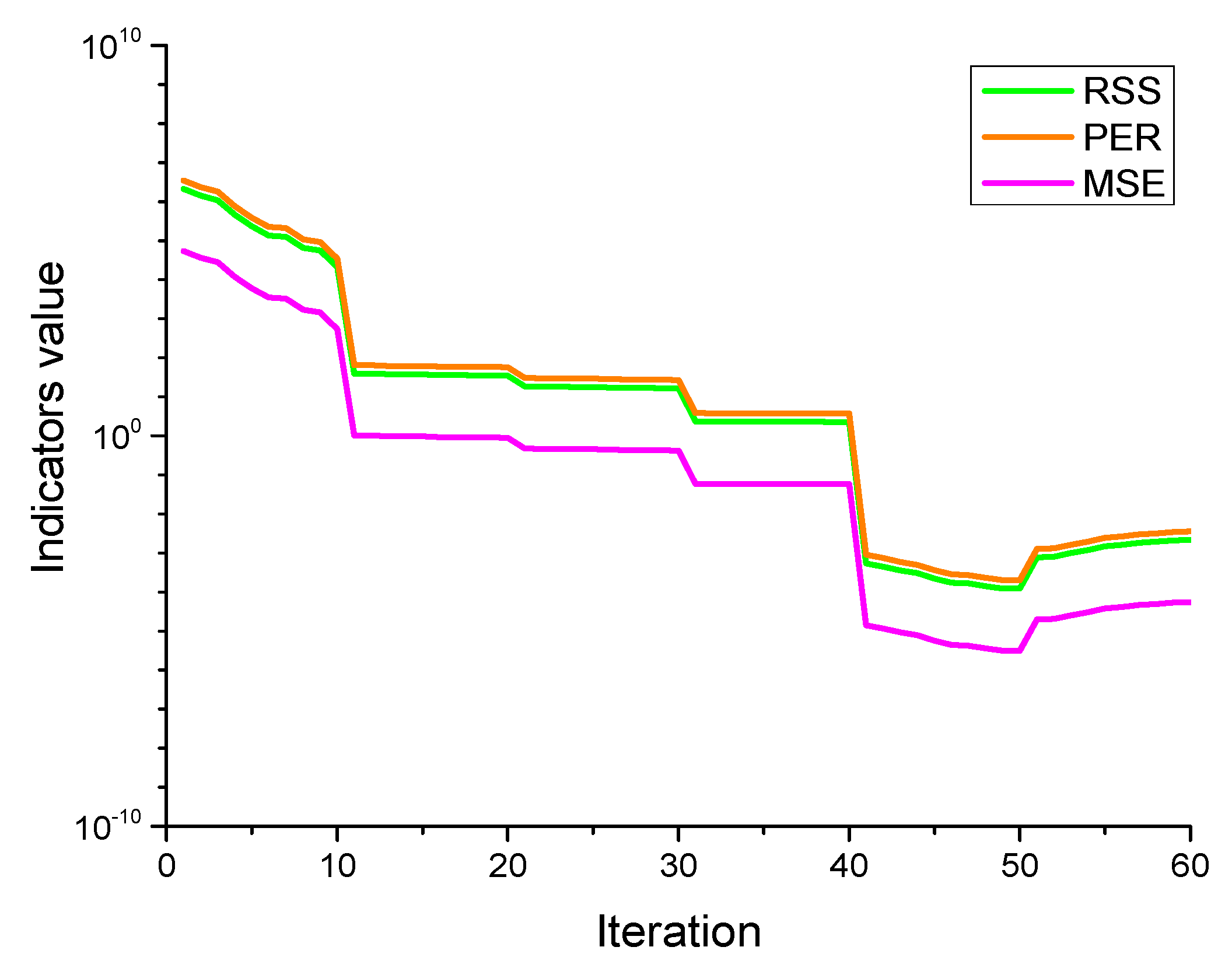
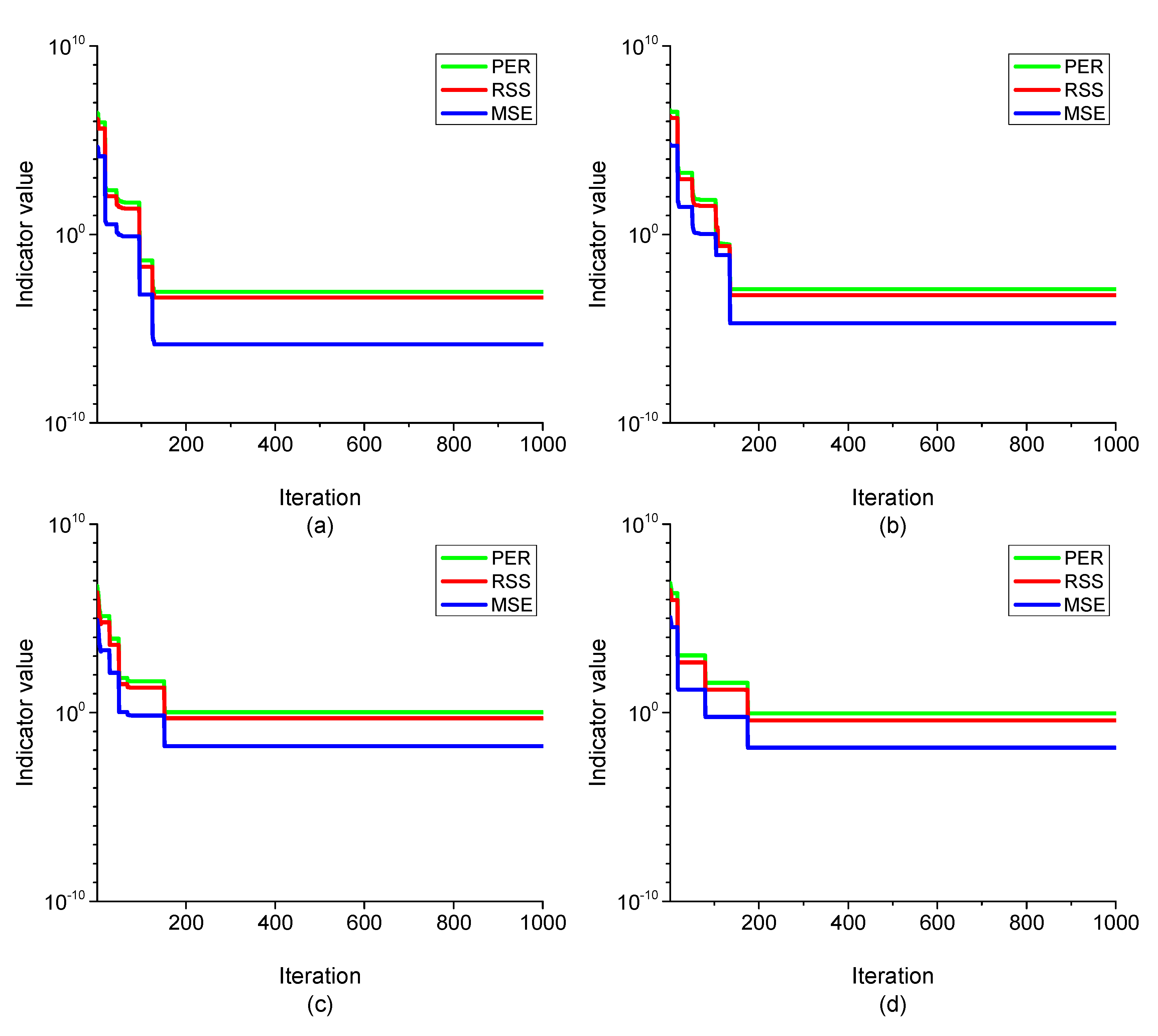
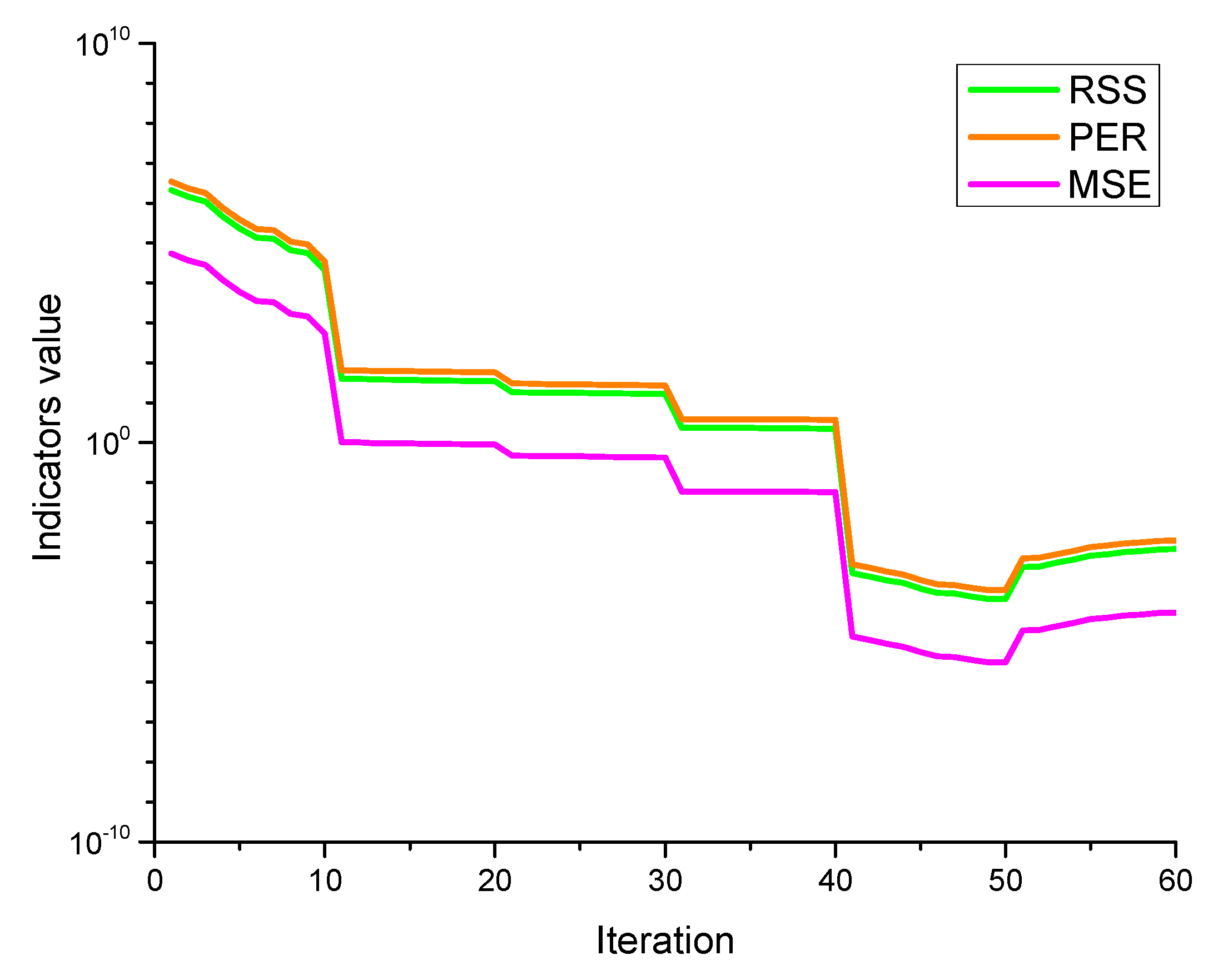
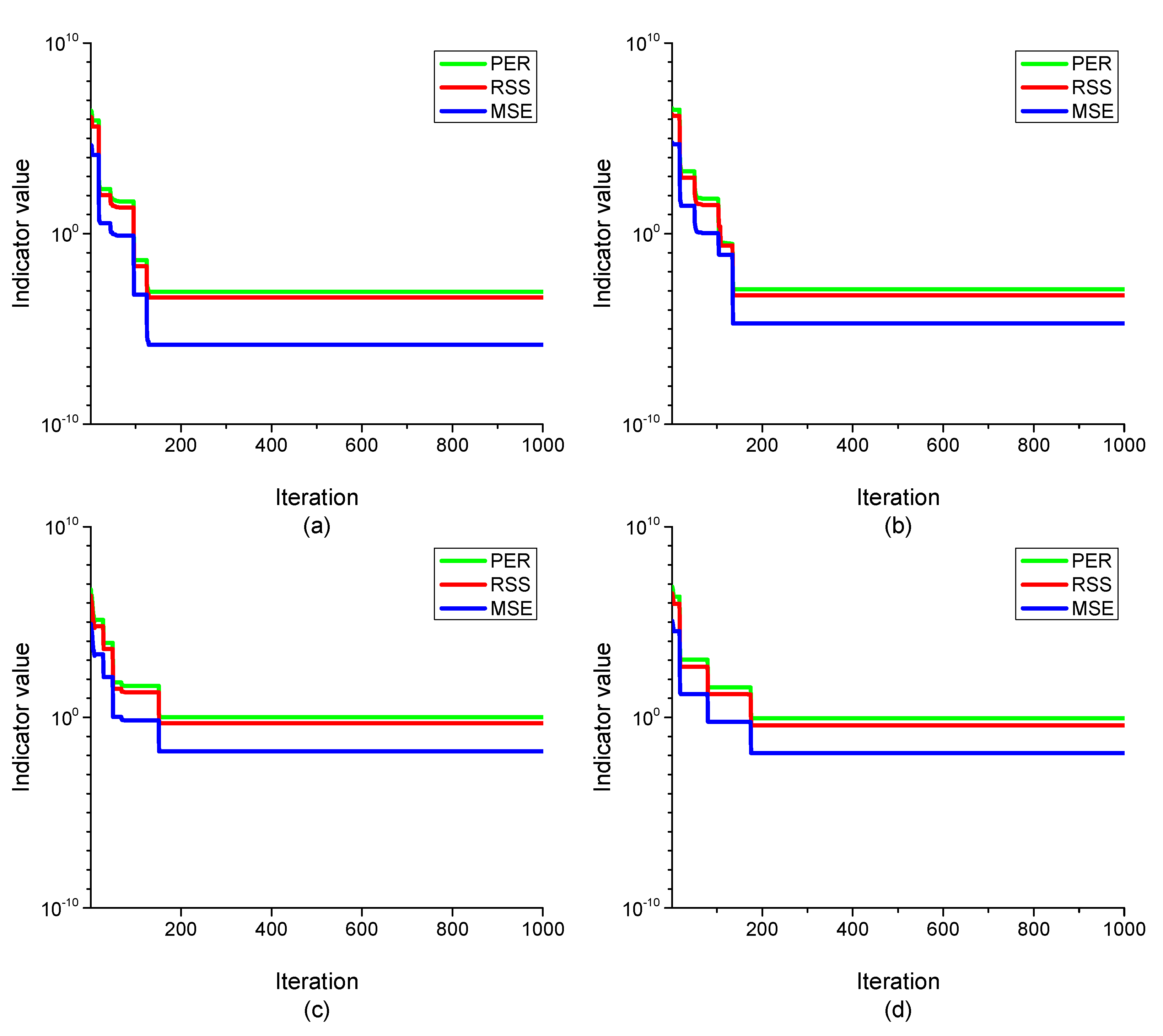
- Mean Square Error (MSE) which can be computed using (13).
- Residual Sum of Squares (RSS) and is calculated as:
- Performance Index (PER) is another evaluation indicator used in this study for the comparison of GWO-LS with the state of art techniques and is determined as:
4.1. Test System I: Estimation of Integral Harmonics without Including Sub and Inter Harmonics in Time-Varying Noisy Environment
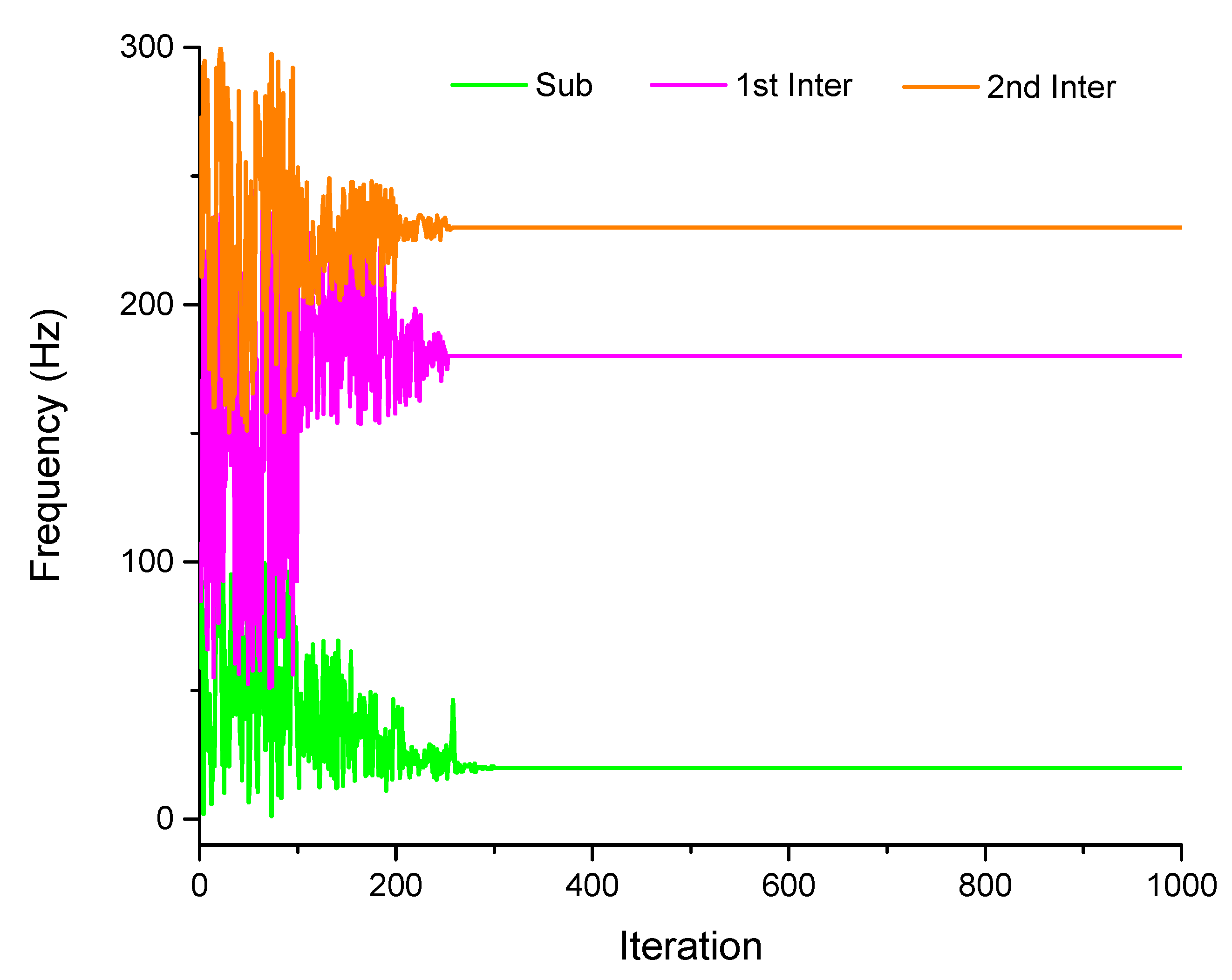
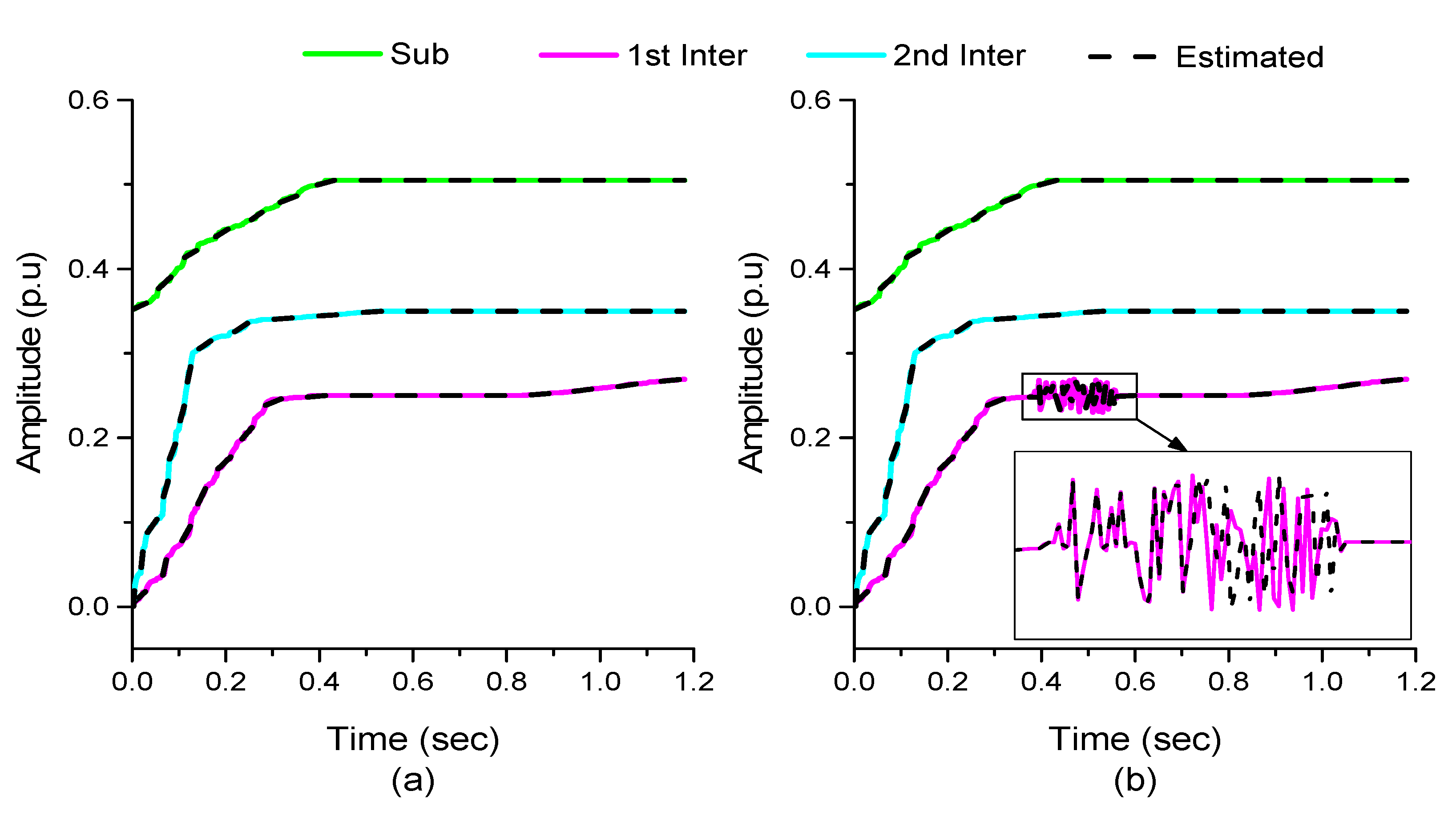
4.2. Test System II: Estimation of Integral Harmonics Including Sub and Inter Harmonics in a Time-Varying Noisy Environment
5. Conclusions
6. Future Recommendations
- Practical and industrial implementation of proposed research for accurate estimation of electrical harmonics amplitude and phase.
- Proposed harmonic estimator can be helpful in designing active filters to nullify the effects of harmonics thus improving power quality.
- Determine the emission level of higher harmonic components and identifying the source of voltage distortion in the power supply system of industrial enterprises.
- Detailed Analysis of the Steady and transient Conditions of the electrical signals having sub, inter, and integral harmonics.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ahmed, A.; Faisal, M.; Khan, N.; Khan, I.; Member, S.; Alquhayz, H.; Khan, M.A.; Kiani, A.T. A Novel Framework to Determine the Impact of Time Varying Load Models on Wind DG Planning. IEEE Access 2021, 9, 1–16. [Google Scholar] [CrossRef]
- Klyuev, R.V.; Fomenko, O.A.; Gavrina, O.A.; Sokolov, A.A.; Sokolova, O.A.; Dzeranov, B.V.; Morgoev, I.D.; Zaseev, S.G. Analysis of non-sinusoidal voltage at metallurgical enterprises. IOP Conf. Ser. Mater. Sci. Eng. 2019, 663. [Google Scholar] [CrossRef] [Green Version]
- Kabalci, Y.; Kockanat, S.; Kabalci, E. A modified ABC algorithm approach for power system harmonic estimation problems. Electr. Power Syst. Res. 2018, 154, 160–173. [Google Scholar] [CrossRef]
- Hackl, C.M.; Landerer, M. Modified Second-Order Generalized Integrators with Modified Frequency Locked Loop for Fast Harmonics Estimation of Distorted Single-Phase Signals. IEEE Trans. Power Electron. 2020, 35, 3298–3309. [Google Scholar] [CrossRef] [Green Version]
- Ashraf, M.M.; Ullah, M.O.; Malik, T.N.; Waqas, A.B.; Iqbal, M.; Siddiq, F. Robust Extraction of Harmonics using Heuristic Advanced Gravitational Search Algorithm-based Least Square Estimator. Nucleus 2017, 54, 219–231. [Google Scholar]
- Ashraf, M.M.; Ullah, M.O.; Malik, T.N.; Waqas, A.B.; Iqbal, M.; Siddiq, F. A Hybrid Water Cycle Algorithm-Least Square based Framework for Robust Estimation of Harmonics. Nucleus 2018, 55, 47–60. [Google Scholar]
- Labrador Rivas, A.E.; da Silva, N.; Abrão, T. Adaptive current harmonic estimation under fault conditions for smart grid systems. Electr. Power Syst. Res. 2020, 183. [Google Scholar] [CrossRef]
- Enayati, J.; Moravej, Z. Real-time harmonic estimation using a novel hybrid technique for embedded system implementation. Int. Trans. Electr. Energy Syst. 2017, 27, 1–13. [Google Scholar] [CrossRef]
- Yao, J.; Yu, H.; Dietz, M.; Xiao, R.; Chen, S.; Wang, T.; Niu, Q. Acceleration harmonic estimation for a hydraulic shaking table by using particle swarm optimization. Trans. Inst. Meas. Control. 2017, 39, 738–747. [Google Scholar] [CrossRef]
- Chen, C.I.; Chang, G.W. Virtual instrumentation and educational platform for time-varying harmonic and interharmonic detection. IEEE Trans. Ind. Electron. 2010, 57, 3334–3342. [Google Scholar] [CrossRef]
- Urbina-Salas, I.; Razo-Hernandez, J.R.; Granados-Lieberman, D.; Valtierra-Rodriguez, M.; Torres-Fernandez, J.E. Instantaneous Power Quality Indices Based on Single-Sideband Modulation and Wavelet Packet-Hilbert Transform. IEEE Trans. Instrum. Meas. 2017, 66, 1021–1031. [Google Scholar] [CrossRef]
- Jain, S.K.; Singh, S.N. Harmonics estimation in emerging power system: Key issues and challenges. Electr. Power Syst. Res. 2011, 81, 1754–1766. [Google Scholar] [CrossRef]
- Yao, J.; Wan, Z.; Fu, Y. Acceleration Harmonic Estimation in a Hydraulic Shaking Table Using Water Cycle Algorithm. Shock Vib. 2018, 2018. [Google Scholar] [CrossRef] [Green Version]
- Yaghoobi, J.; Alduraibi, A.; Zare, F. Current harmonic estimation techniques based on voltage measurements in distribution networks. Australas. Univ. Power Eng. Conf. AUPEC 2018 2018, 1–6. [Google Scholar] [CrossRef]
- Garanayak, P.; Naayagi, R.T.; Panda, G. A High-Speed Master-Slave ADALINE for Accurate Power System Harmonic and Inter-Harmonic Estimation. IEEE Access 2020, 8, 51918–51932. [Google Scholar] [CrossRef]
- Huang, C.L.; Yang, S.C. Sensorless Vibration Harmonic Estimation of Servo System Based on the Disturbance Torque Observer. IEEE Trans. Ind. Electron. 2020, 67, 2122–2132. [Google Scholar] [CrossRef]
- Rodrigues, N.M.; Ramos, P.M.; Janeiro, F.M. Comparison of harmonic estimation methods for power quality assessment. J. Phys. Conf. Ser. 2018, 1065. [Google Scholar] [CrossRef] [Green Version]
- Malagon-Carvajal, G.; Bello-Pena, J.; Ordonez-Plata, G.; Duarte, C. Time-to-frequency domain SMPS model for harmonic estimation: Methodology. Renew. Energy Power Qual. J. 2017, 1, 825–830. [Google Scholar] [CrossRef]
- Sahu, B.; Dhar, S.; Dash, P.K. Frequency-scaled optimized time-frequency transform for harmonic estimation in photovoltaic-based microgrid. Int. Trans. Electr. Energy Syst. 2020, 30, 1–23. [Google Scholar] [CrossRef]
- Kiani, A.T.; Nadeem, M.F.; Ahmed, A.; Khan, I.; Elavarasan, R.M.; Das, N. Exponential Function-Based Dynamic Inertia Weight Particle Swarm Optimization. Energies 2020, 13, 4037. [Google Scholar] [CrossRef]
- Ahmed, A.; Faisal, M.; Ali, I.; Bo, R.; Khan, I.A. Probabilistic generation model for optimal allocation of wind DG in distribution systems with time varying load models. Sustain. Energy Grids Networks 2020, 22, 100358. [Google Scholar] [CrossRef]
- Ray, P.K.; Subudhi, B. Ensemble-Kalman-filter-based power system harmonic estimation. IEEE Trans. Instrum. Meas. 2012, 61, 3216–3224. [Google Scholar] [CrossRef]
- Singh, S.K.; Sinha, N.; Goswami, A.K.; Sinha, N. Several variants of Kalman Filter algorithm for power system harmonic estimation. Int. J. Electr. Power Energy Syst. 2016, 78, 793–800. [Google Scholar] [CrossRef]
- Karimi-Ghartemani, M.; Ooi, B.T.; Bakhshai, A. Application of enhanced phase-locked loop system to the computation of synchrophasors. IEEE Trans. Power Deliv. 2011, 26, 22–32. [Google Scholar] [CrossRef]
- Xi, Y.; Tang, X.; Li, Z.; Cui, Y.; Zhao, T.; Zeng, X.; Guo, J.; Duan, W. Harmonic estimation in power systems using an optimised adaptive Kalman filter based on PSO-GA. IET Gener. Transm. Distrib. 2019, 13, 3968–3979. [Google Scholar] [CrossRef]
- Durdhavale, S.R.; Ahire, D.D. A Review of Harmonics Detection and Measurement in Power System. Int. J. Comput. Appl. 2016, 143, 975–8887. [Google Scholar]
- Lu, Z.; Ji, T.Y.; Tang, W.H.; Wu, Q.H. Optimal harmonic estimation using a particle swarm optimizer. IEEE Trans. Power Deliv. 2008, 23, 1166–1174. [Google Scholar] [CrossRef]
- Kiani, A.T.; Nadeem, M.F.; Ahmed, A.; Sajjad, I.A.; Haris, M.S.; Martirano, L. Optimal Parameter Estimation of Solar Cell using Simulated Annealing Inertia Weight Particle Swarm Optimization (SAIW-PSO). In Proceedings of the 2020 IEEE International Conference on Environment and Electrical Engineering and 2020 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Madrid, Spain, 9–12 June 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Bettayeb, M.; Qidwai, U. A hybrid least squares-GA-based algorithm for harmonic estimation. IEEE Trans. Power Deliv. 2003, 18, 377–382. [Google Scholar] [CrossRef]
- Mishra, S. Hybrid least-square adaptive bacterial foraging strategy for harmonic estimation. IEE Proc. Gener. Transm. Distrib. 2005, 152, 379–389. [Google Scholar] [CrossRef]
- Subudhi, B.; Ray, P.K. A hybrid Adaline and Bacterial Foraging approach to power system harmonics estimation. In Proceedings of the 2010 International Conference on Industrial Electronics, Control and Robotics, Rourkela, India, 27–29 December 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 236–242. [Google Scholar] [CrossRef]
- Ji, T.Y.; Li, M.S.; Wu, Q.H.; Jiang, L. Optimal estimation of harmonics in a dynamic environment using an adaptive bacterial swarming algorithm. IET Gener. Transm. Distrib. 2011, 5, 609–620. [Google Scholar] [CrossRef]
- Singh, S.K.; Sinha, N.; Goswami, A.K.; Sinha, N. Optimal estimation of power system harmonics using a hybrid Firefly algorithm-based least square method. Soft Comput. 2017, 21, 1721–1734. [Google Scholar] [CrossRef]
- Biswas, S.; Chatterjee, A.; Goswami, S.K. An artificial bee colony-least square algorithm for solving harmonic estimation problems. Appl. Soft Comput. J. 2013, 13, 2343–2355. [Google Scholar] [CrossRef]
- Singh, S.K.; Sinha, N.; Goswami, A.K.; Sinha, N. Power system harmonic estimation using biogeography hybridized recursive least square algorithm. Int. J. Electr. Power Energy Syst. 2016, 83, 219–228. [Google Scholar] [CrossRef]
- Kabalci, Y.; Kockanat, S.; Kabalci, E. A differential search algorithm application for solving harmonic estimation problems. In Proceedings of the 2017 9th International Conference on Electronics, Computers and Artificial Intelligence (ECAI), Targoviste, Romania, 29 June–1 July 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Singh, S.K.; Kumari, D.; Sinha, N.; Goswami, A.K.; Sinha, N. Gravity Search Algorithm hybridized Recursive Least Square method for power system harmonic estimation. Eng. Sci. Technol. Int. J. 2017, 20, 874–884. [Google Scholar] [CrossRef]
- Xu, Y.; Liu, Y.; Li, Z.; Li, Z.; Wang, Q. Harmonic estimation base on center frequency shift algorithm. Mapan J. Metrol. Soc. India 2017, 32, 43–50. [Google Scholar] [CrossRef]
- Saxena, A.; Kumar, R.; Mirjalili, S. A harmonic estimator design with evolutionary operators equipped grey wolf optimizer. Expert Syst. Appl. 2020, 145, 113125. [Google Scholar] [CrossRef]
- Carbajal, F.B.; Olvera, R.T. An adaptive neural online estimation approach of harmonic components. Electr. Power Syst. Res. 2020, 186, 106406. [Google Scholar] [CrossRef]
- Cupertino, F.; Lavopa, E.; Zanchetta, P.; Sumner, M.; Salvatore, L. Running DFT-based PLL algorithm for frequency, phase, and amplitude tracking in aircraft electrical systems. IEEE Trans. Ind. Electron. 2011, 58, 1027–1035. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer 1 1. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Deng, Z.; Wang, T.; Zhao, G.; Zhou, S. Coupled harmonic admittance identification based on least square estimation. Energies 2018, 11, 2600. [Google Scholar] [CrossRef] [Green Version]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Variables | Range | Description |
|---|---|---|
| a | (2–0) | Linearly decreased 2 to 0 over the course of iterations |
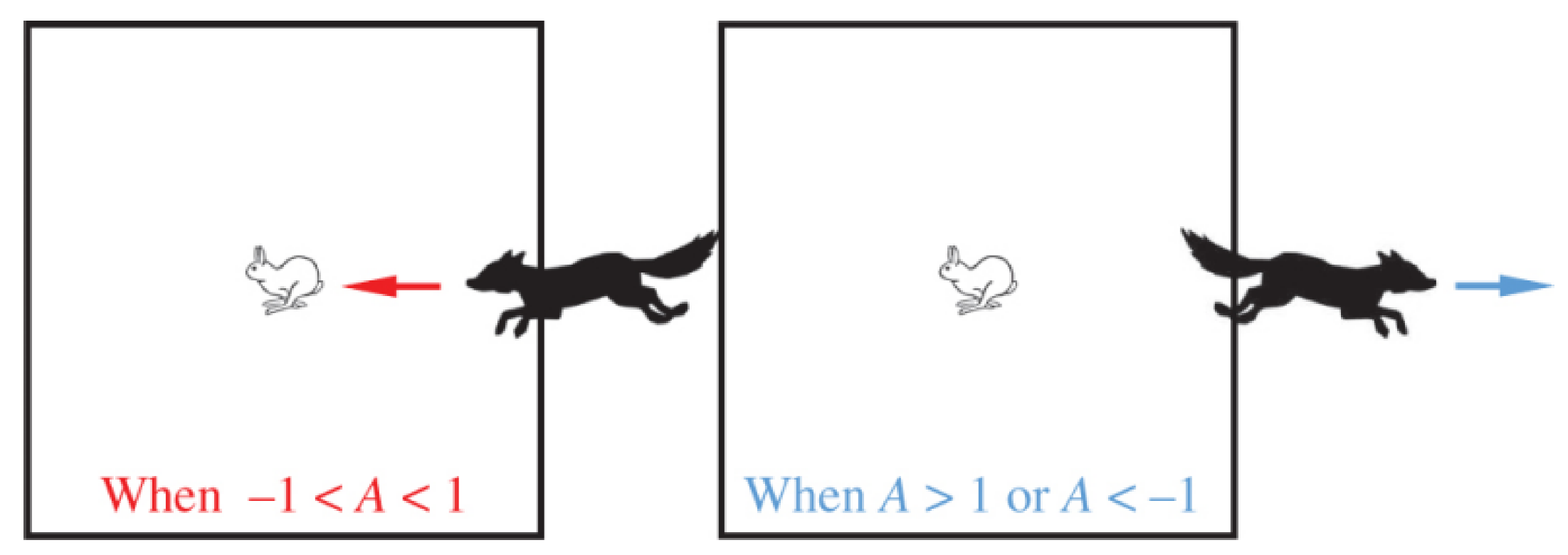
| A | (−2a, 2a) | A is the random value in the interval [−2a, 2a]. If A < 1, then the Exploitation process occurs; otherwise, exploration process. |
| C | (0–2) | It supports the exploration process and models the obstacles which can occur in nature during the hunting step. |
| Harmonics Number | Frequency (Hz) | Amplitude (p.u) | Phase (Degree) |
|---|---|---|---|
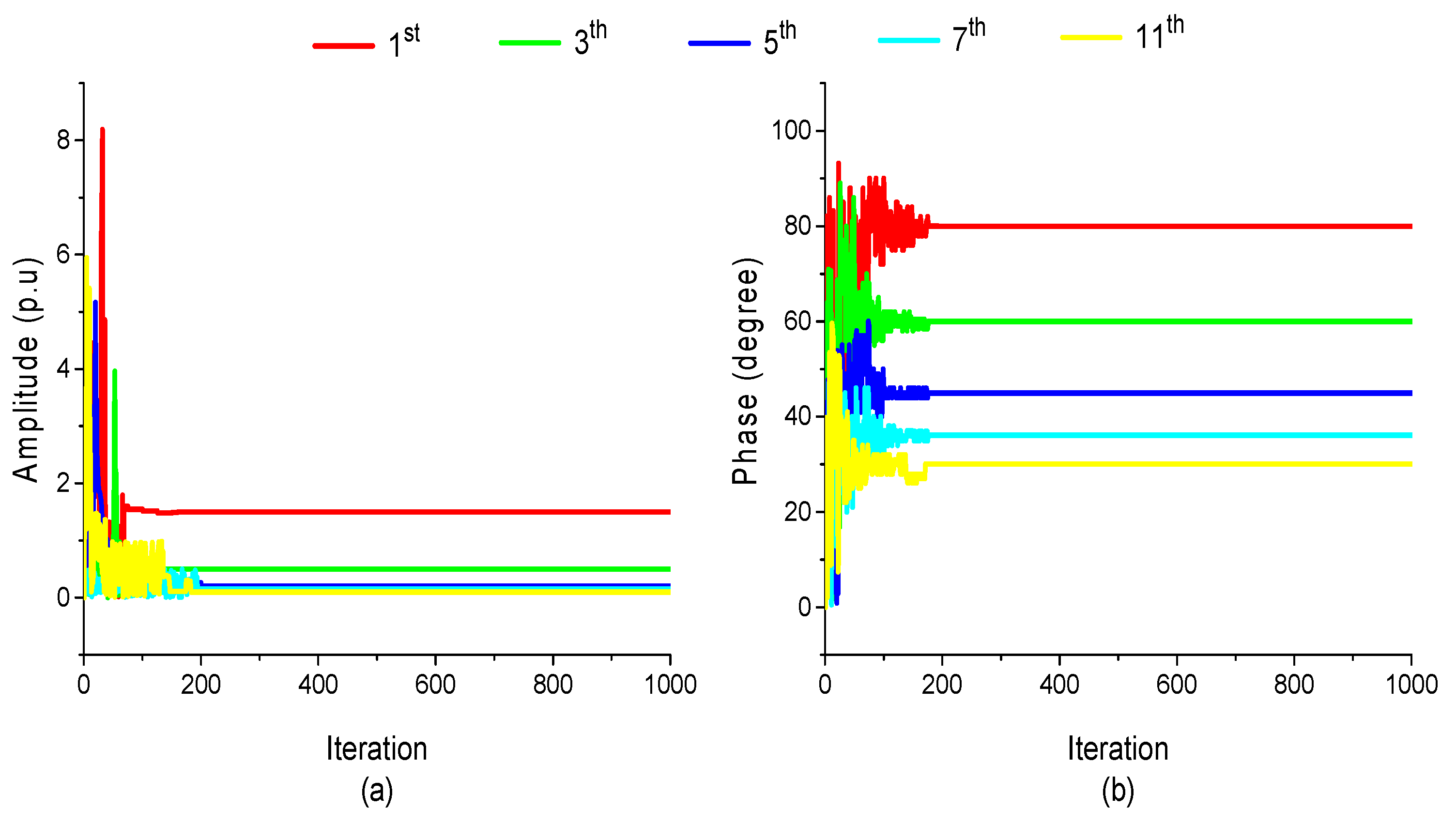
| 1 | 50 | 1.5 | 80 |
| 3 | 150 | 0.5 | 60 |
| 5 | 250 | 0.2 | 45 |
| 7 | 350 | 0.15 | 36 |
| 11 | 550 | 0.1 | 30 |
| Model Parameters | Parametric Value |
|---|---|
| Number of Iterations | 1000 |
| Grey wolves (Searching Agents) | 50 |
| Number of trials | 25 |
| Nyquist Criterion Samples per cycle | 64 |
| Sampling frequency | 3.2 kHz |
| Noise levels in dB | 40, 20, 10 |
| DC Offset | 0.5 exp (−5t) |
| Number of Iterations | 1000 |
| Model Parameters | Parametric Value |
|---|---|
| Best MSE | 2.01 |
| Worst MSE | 2.31 |
| Average MSE | 3.16 |
| Standard deviation | 6.47 |
| Total Harmonic Distortion | 1.43 |
| Techniques | Parameter | 1st Harmonic | 3rd Harmonic | 5th Harmonic | 7th Harmonic | 11th Harmonic | Computational Time (s) |
|---|---|---|---|---|---|---|---|
| Test Signal | Frequency (Hz) | 50 | 150 | 250 | 350 | 550 | - |
| Amplitude (per unit) | 1.5 | 0.5 | 0.20 | 0.15 | 0.1 | ||
| Phase (degree) | 80 | 60 | 45 | 36 | 30 | ||
| F-BFO-LS | Amplitude (per unit) | 10.532 | |||||
| Percentage Error (%) | |||||||
| Phase (degree) | |||||||
| Percentage Error (%) | |||||||
| BFO-RLS | Amplitude (per unit) | 9.345 | |||||
| Percentage Error (%) | |||||||
| Phase (degree) | |||||||
| Percentage Error (%) | |||||||
| BBO-RLS | Amplitude (per unit) | 5.852 | |||||
| Percentage Error (%) | |||||||
| Phase (degree) | |||||||
| Percentage Error (%) | |||||||
| GSA-RLS | Amplitude (per unit) | 5.6545 | |||||
| Percentage Error (%) | |||||||
| Phase (degree) | |||||||
| Percentage Error (%) | |||||||
| MABC | Amplitude (per unit) | 1.0110 | |||||
| Percentage Error (%) | |||||||
| Phase (degree) | |||||||
| Percentage Error (%) | |||||||
| GWO-LS | Amplitude (per unit) | 0.571 | |||||
| Percentage Error (%) | |||||||
| Phase (degree) | |||||||
| Percentage Error (%) |
| Techniques | Parameter | Sub Harmonic | 1st Inter Harmonic | 2nd Inter Harmonic | Computational Time (s) |
|---|---|---|---|---|---|
| Test Signal | Frequency (Hz) | 20 | 180 | 230 | - |
| Amplitude (per unit) | 0.505 | 0.25 | 0.35 | ||
| Phase (degree) | 75 | 65 | 20 | ||
| F-BFO-LS | Amplitude (per unit) | 13.253 | |||
| Percentage Error (%) | |||||
| Phase (degree) | |||||
| Percentage Error (%) | |||||
| BFO-RLS | Amplitude (per unit) | 12.837 | |||
| Percentage Error (%) | |||||
| Phase (degree) | |||||
| Percentage Error (%) | |||||
| BBO-RLS | Amplitude (per unit) | 6.7525 | |||
| Percentage Error (%) | |||||
| Phase (degree) | |||||
| Percentage Error (%) | |||||
| GSA-RLS | Amplitude (per unit) | 6.1575 | |||
| Percentage Error (%) | |||||
| Phase (degree) | |||||
| Percentage Error (%) | |||||
| MABC | Amplitude (per unit) | 1.4860 | |||
| Percentage Error (%) | |||||
| Phase (degree) | |||||
| Percentage Error (%) | |||||
| GWO-LS | Amplitude (per unit) | 1.17976 | |||
| Percentage Error (%) | |||||
| Phase (degree) | |||||
| Percentage Error (%) |
| Model Parameters | Parametric Value |
|---|---|
| Best MSE | 4.30235 |
| Worst MSE | |
| Average MSE | |
| Standard deviation |
| Harmonics Number | Frequency (Hz) | Amplitude (p.u) | Phase (Degree) |
|---|---|---|---|
| 40 dB | 20 dB | 10 dB | |
| GA-LS | |||
| PSO-LS | |||
| BFO | |||
| F-BFO-LS | |||
| BFO-RLS | |||
| BBO-RLS | |||
| GSA-RLS | |||
| MABC | |||
| GWO-LS |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdullah, M.; Malik, T.N.; Ahmed, A.; Nadeem, M.F.; Khan, I.A.; Bo, R. A Novel Hybrid GWO-LS Estimator for Harmonic Estimation Problem in Time Varying Noisy Environment. Energies 2021, 14, 2587. https://doi.org/10.3390/en14092587
Abdullah M, Malik TN, Ahmed A, Nadeem MF, Khan IA, Bo R. A Novel Hybrid GWO-LS Estimator for Harmonic Estimation Problem in Time Varying Noisy Environment. Energies. 2021; 14(9):2587. https://doi.org/10.3390/en14092587
Chicago/Turabian StyleAbdullah, Muhammad, Tahir N. Malik, Ali Ahmed, Muhammad F. Nadeem, Irfan A. Khan, and Rui Bo. 2021. "A Novel Hybrid GWO-LS Estimator for Harmonic Estimation Problem in Time Varying Noisy Environment" Energies 14, no. 9: 2587. https://doi.org/10.3390/en14092587
APA StyleAbdullah, M., Malik, T. N., Ahmed, A., Nadeem, M. F., Khan, I. A., & Bo, R. (2021). A Novel Hybrid GWO-LS Estimator for Harmonic Estimation Problem in Time Varying Noisy Environment. Energies, 14(9), 2587. https://doi.org/10.3390/en14092587