
New Infeed Correction Methods for Distance Protection in Distribution Systems


Abstract
:1. Introduction
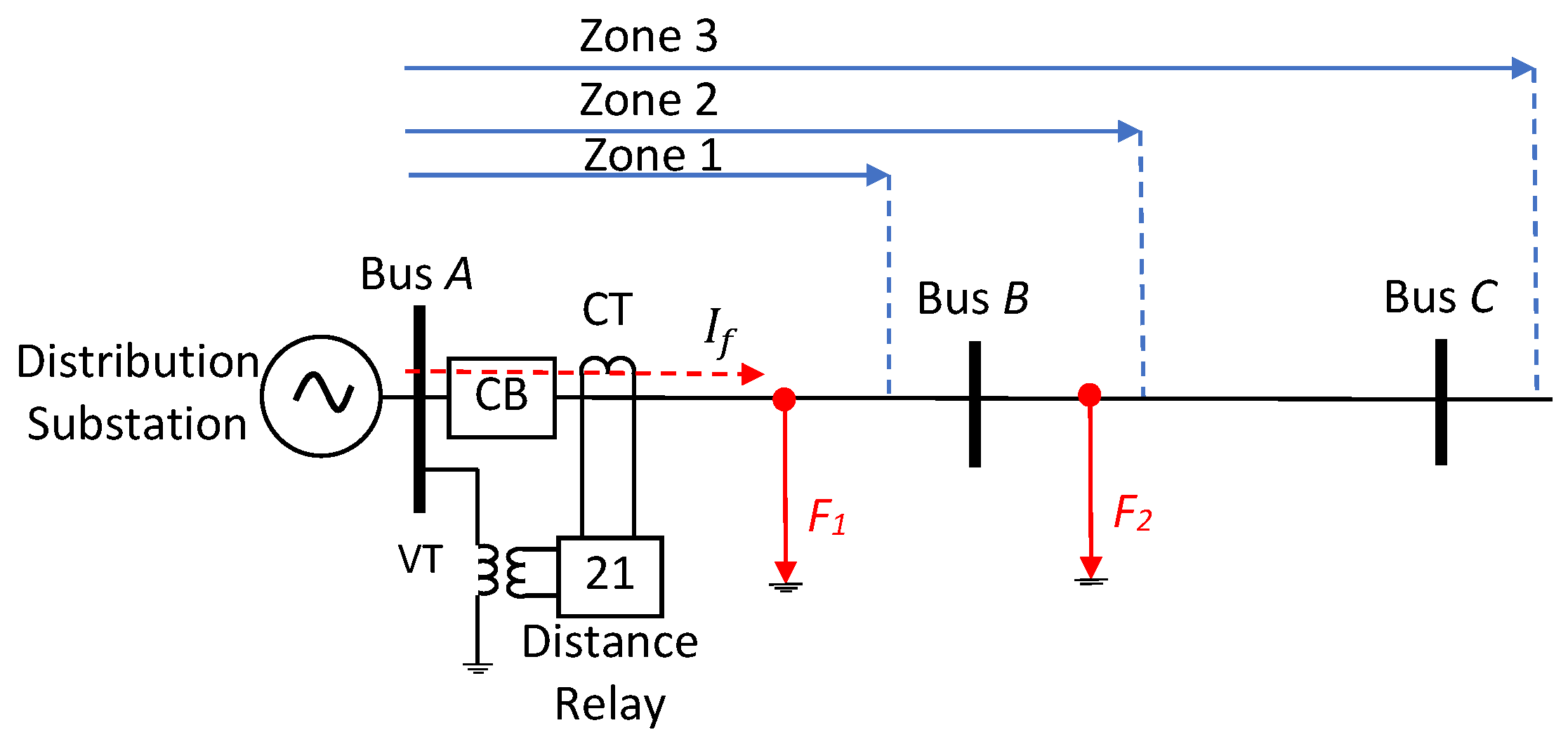
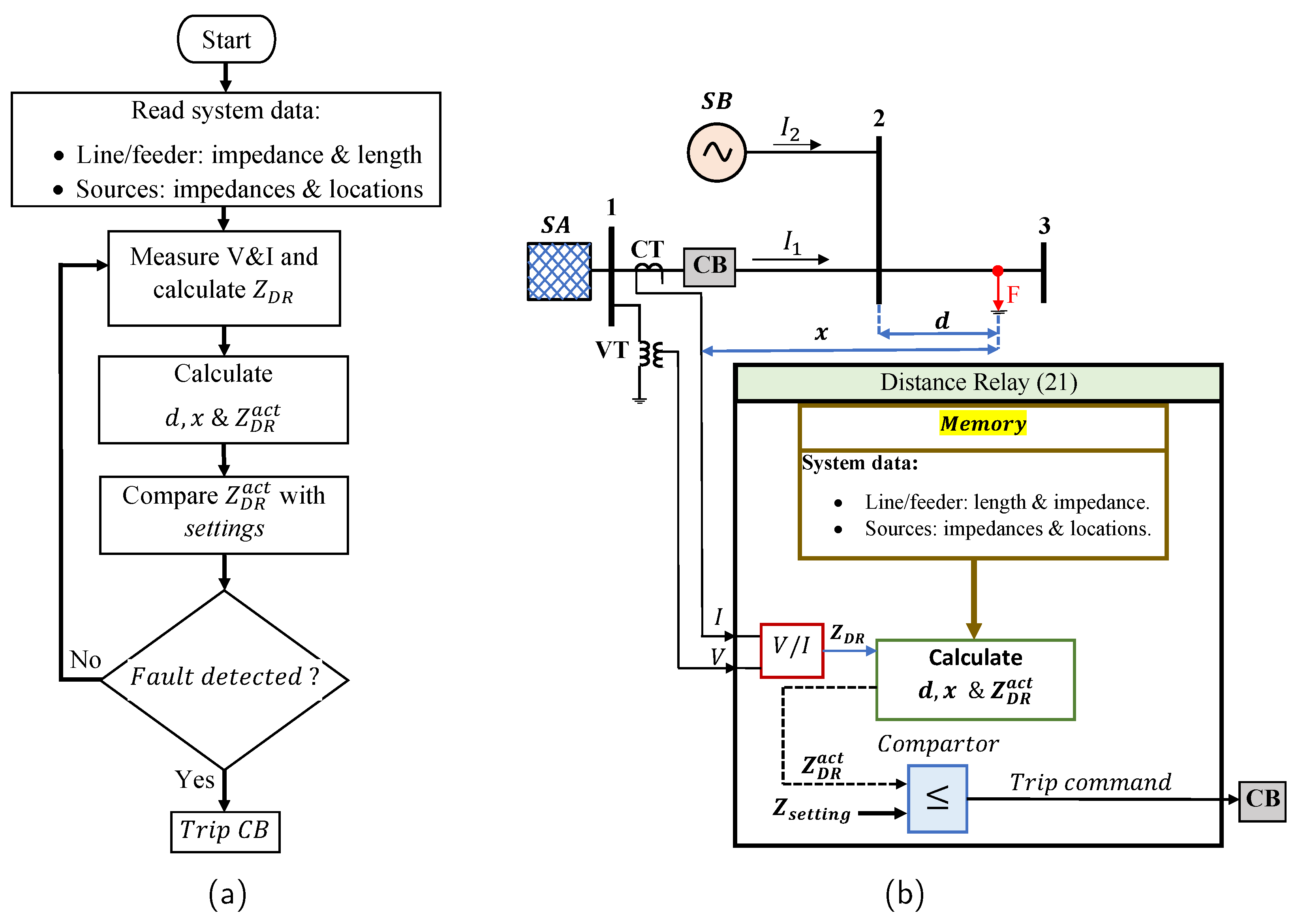
2. Distance Protection
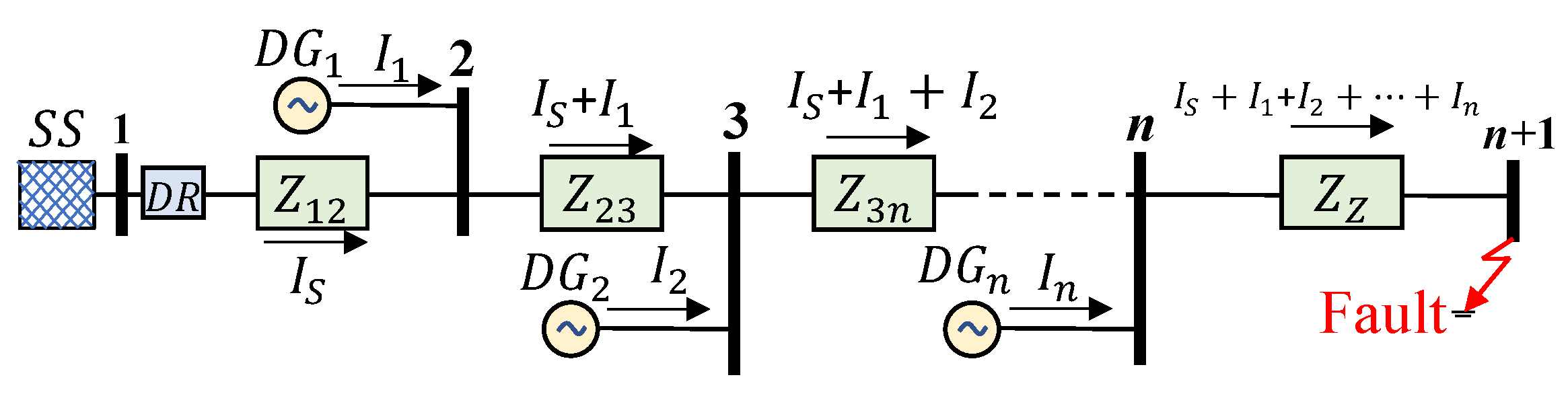
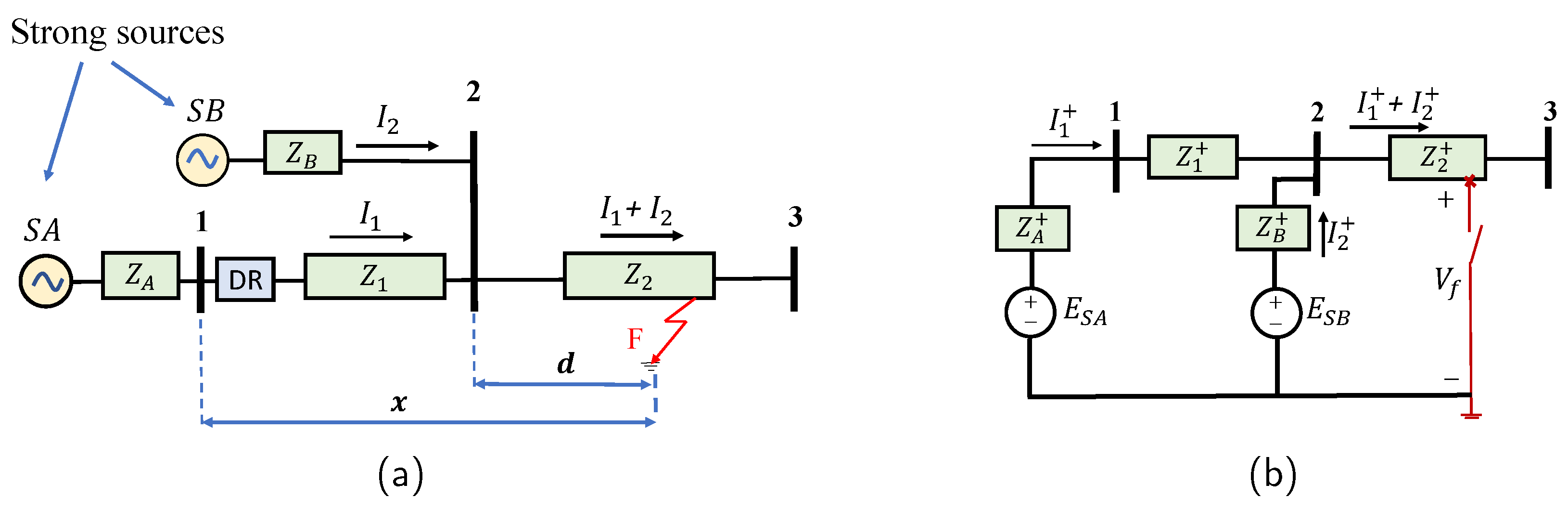
3. Infeed Effect
3.1. Configuration 1
3.2. Configuration 2
3.3. Infeed Effect on Ground Distance Relay
4. Proposed Methodology
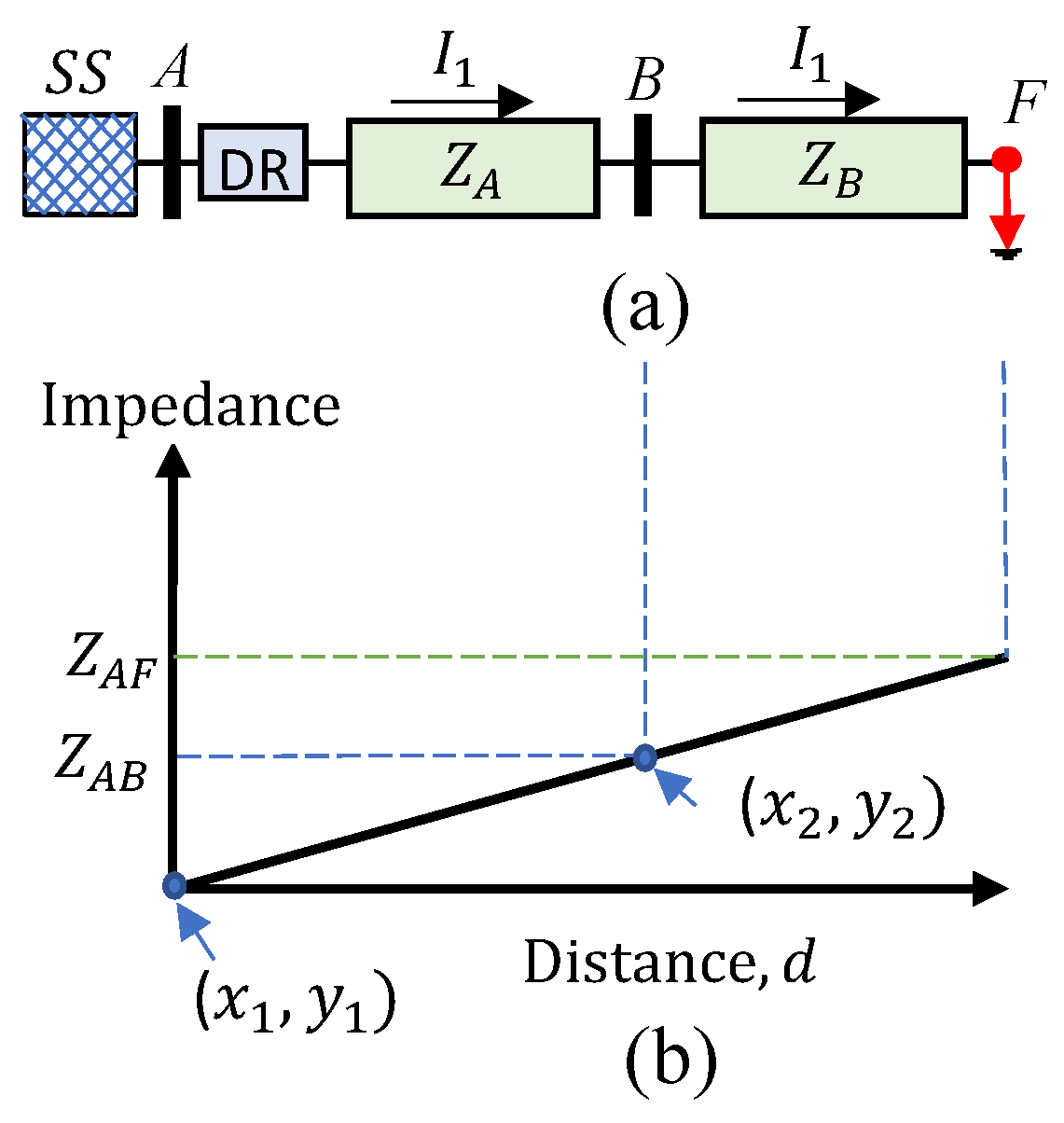
4.1. Method 1
- Step 1
- Calculation of the Thevenin impedance at the fault location. For the given system:where h is the fractional distance along the length of Line 2–3. Note that at Bus 3 and at Bus 2.
- Step 2
- Calculation of the fault currentwhere is the prefault voltage at the fault location and is the Thevenin impedance of the positive-sequence network at the point of the fault from Step 1.
- Step 3
- The fault current contributions from each source can be calculated using the current divider formula:
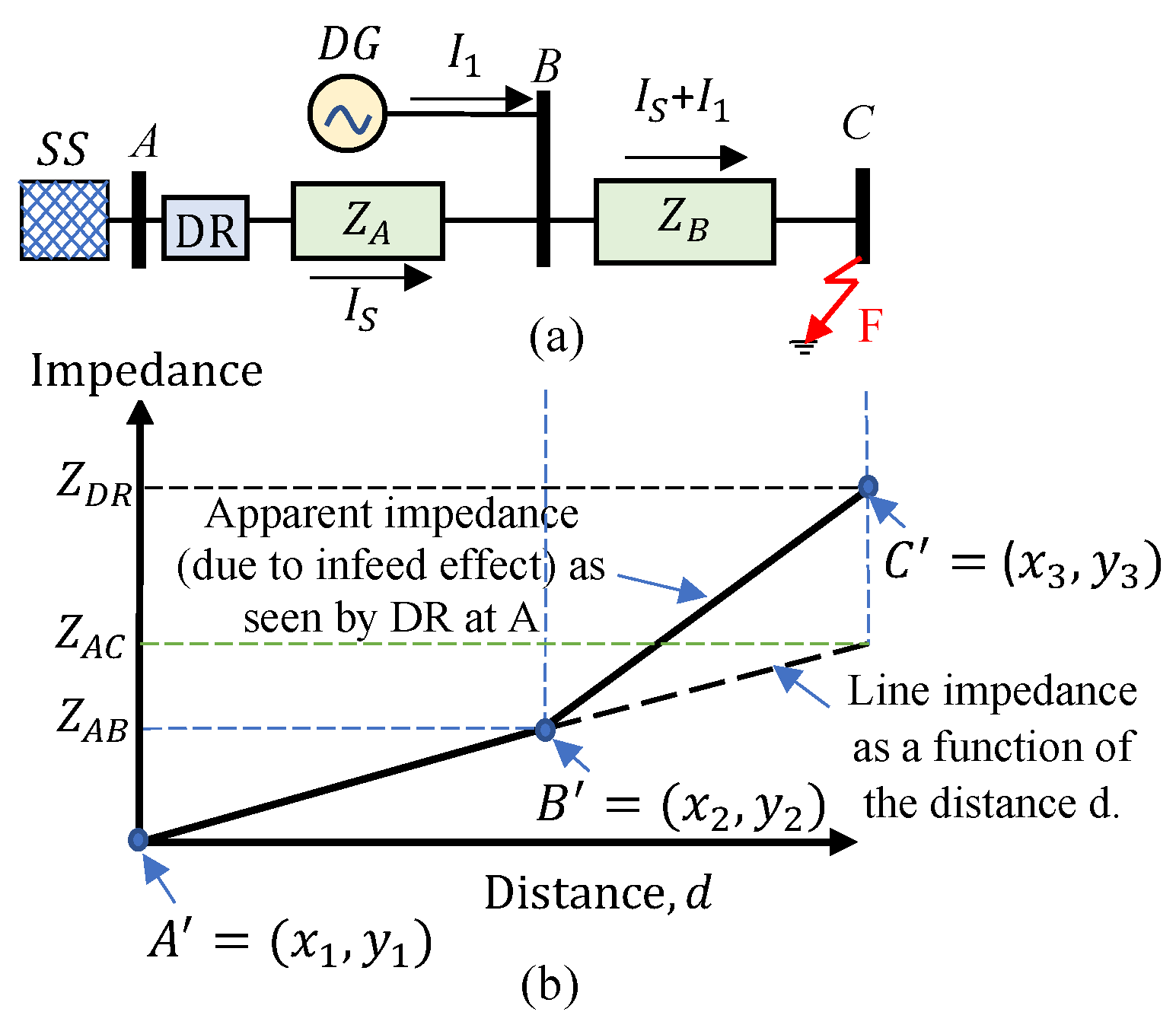
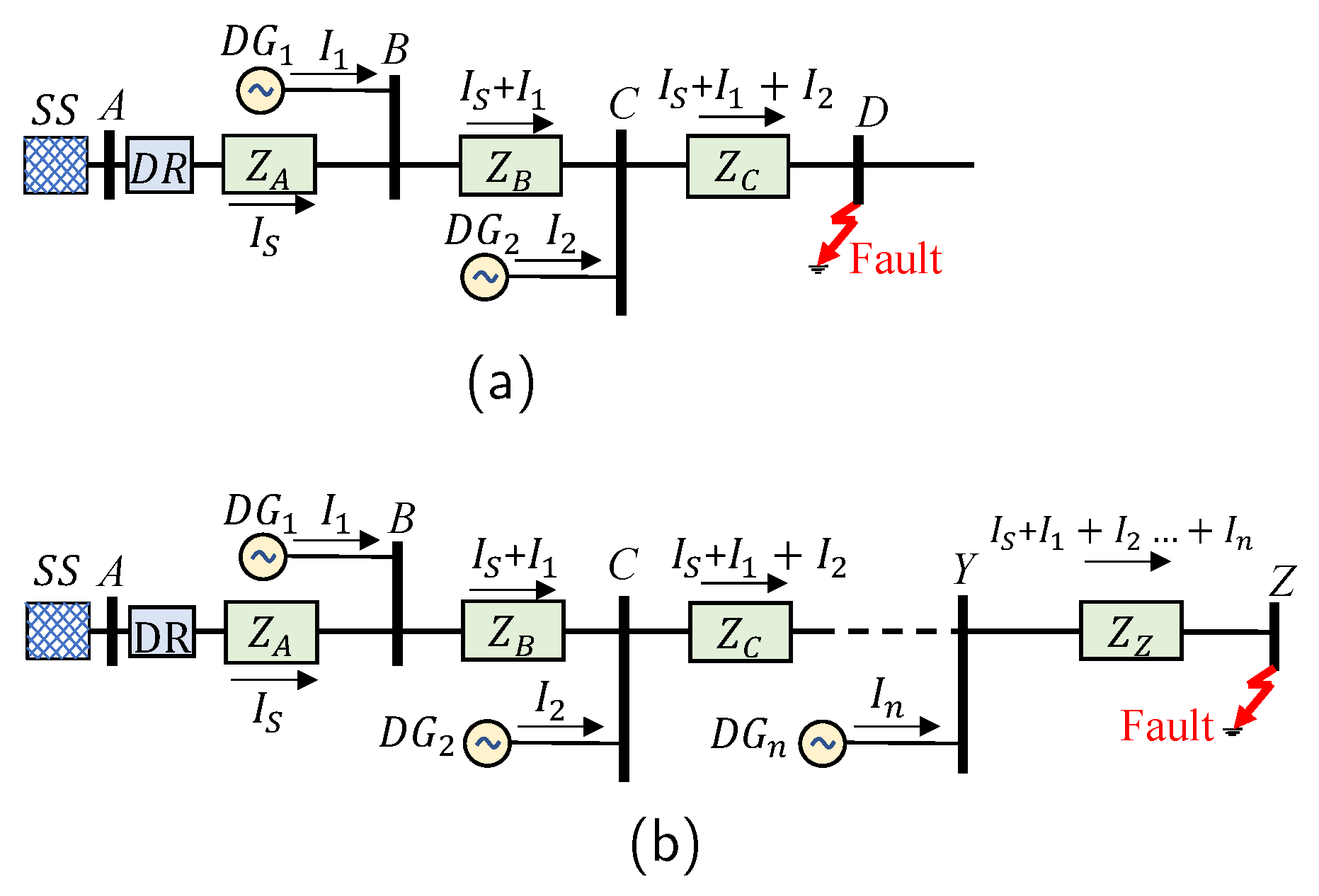
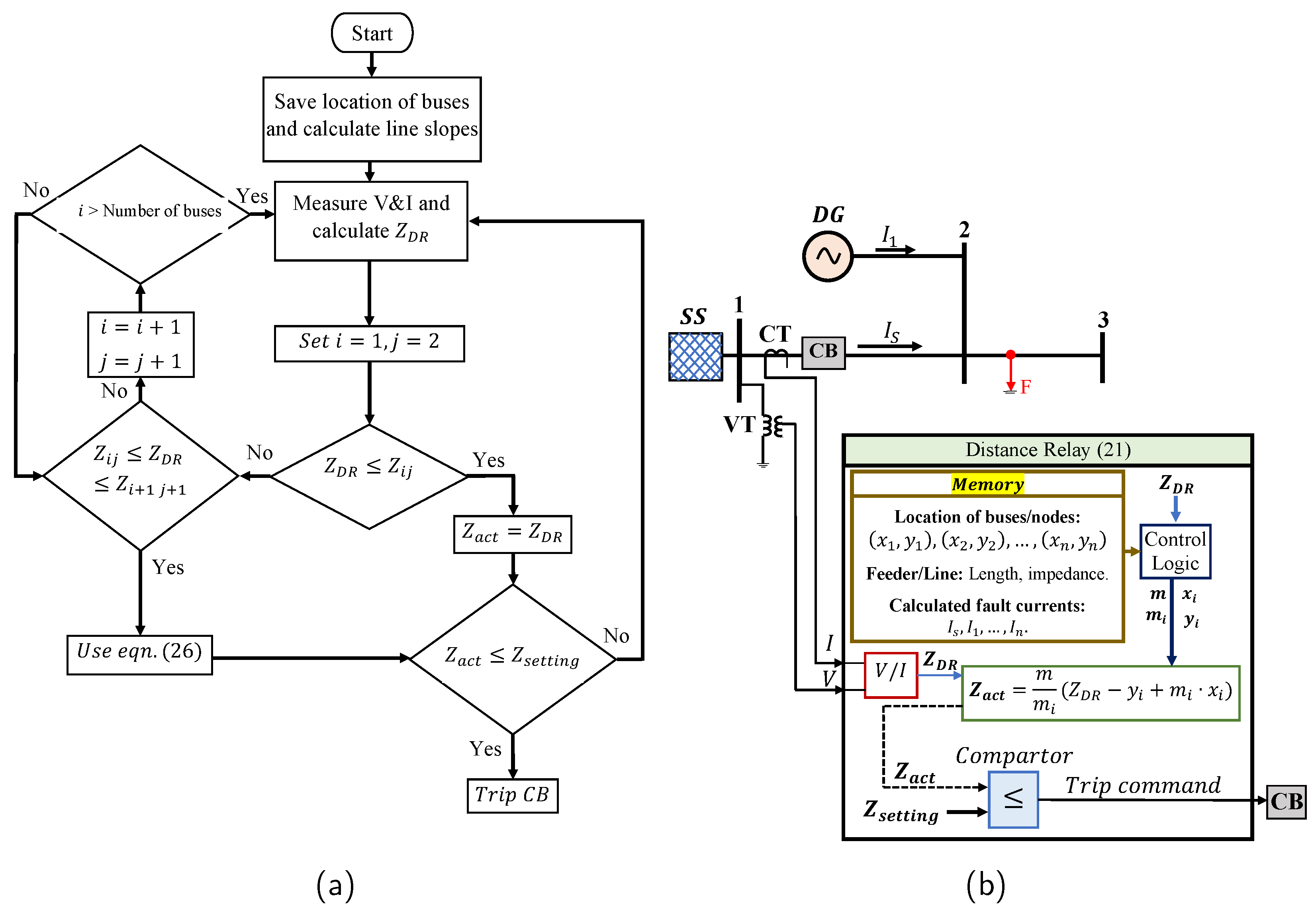
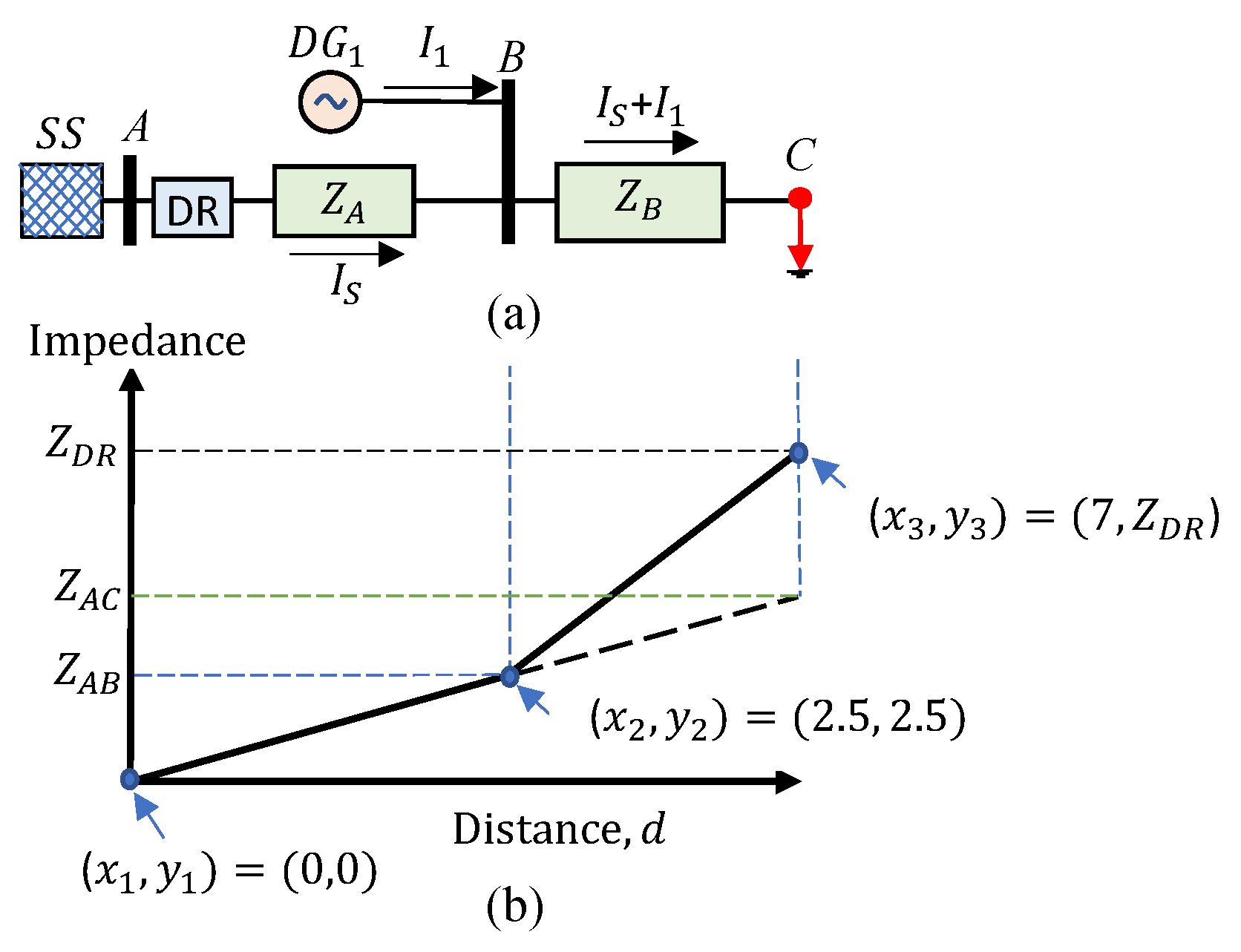
4.2. Method 2
- Step 1
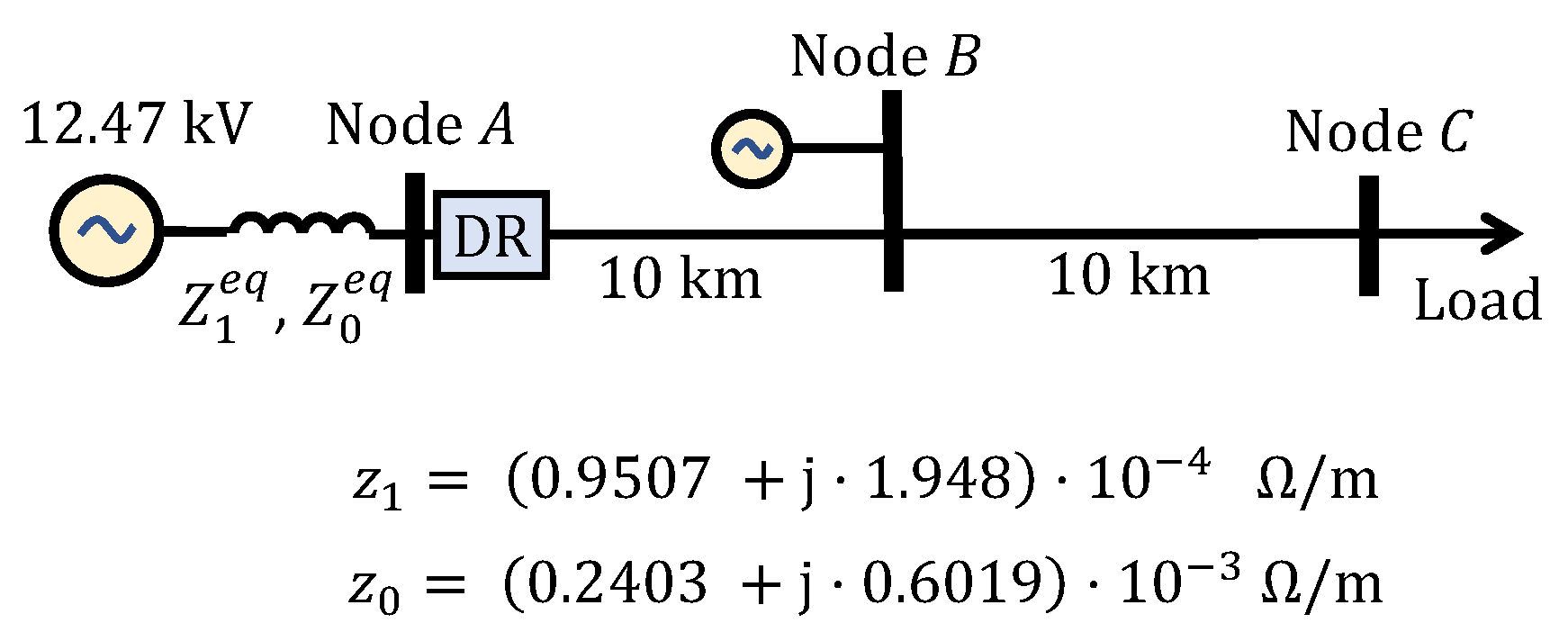
- Calculation of the Thevenin impedance at the fault location. For the given system,where d is the fractional distance along the length of feeder/line. Note that at Bus C and at Bus B. and are the positive-sequence impedances of the substation and DG, respectively. and are the positive-sequence impedances of Line and Line , respectively.
- Step 2
- Calculation of the fault current aswhere is the prefault voltage at fault location and is the Thevenin impedance of the positive-sequence network at the point of the fault from Step 1.
- Step 3
- The fault current contributions from each power source can be calculated using the current divider formula as follows
- Step 4
- Calculation of the infeed constant, .
- Step 5
- Calculation of the impedance value corresponding to the value of d using the following equation
- Step 6
- Changing the value of d in descending order (in small steps) from 1 to 0 and repeating Steps 1–5 for each d value.
- Step 7
- Plotting the impedance vs. distance curve.
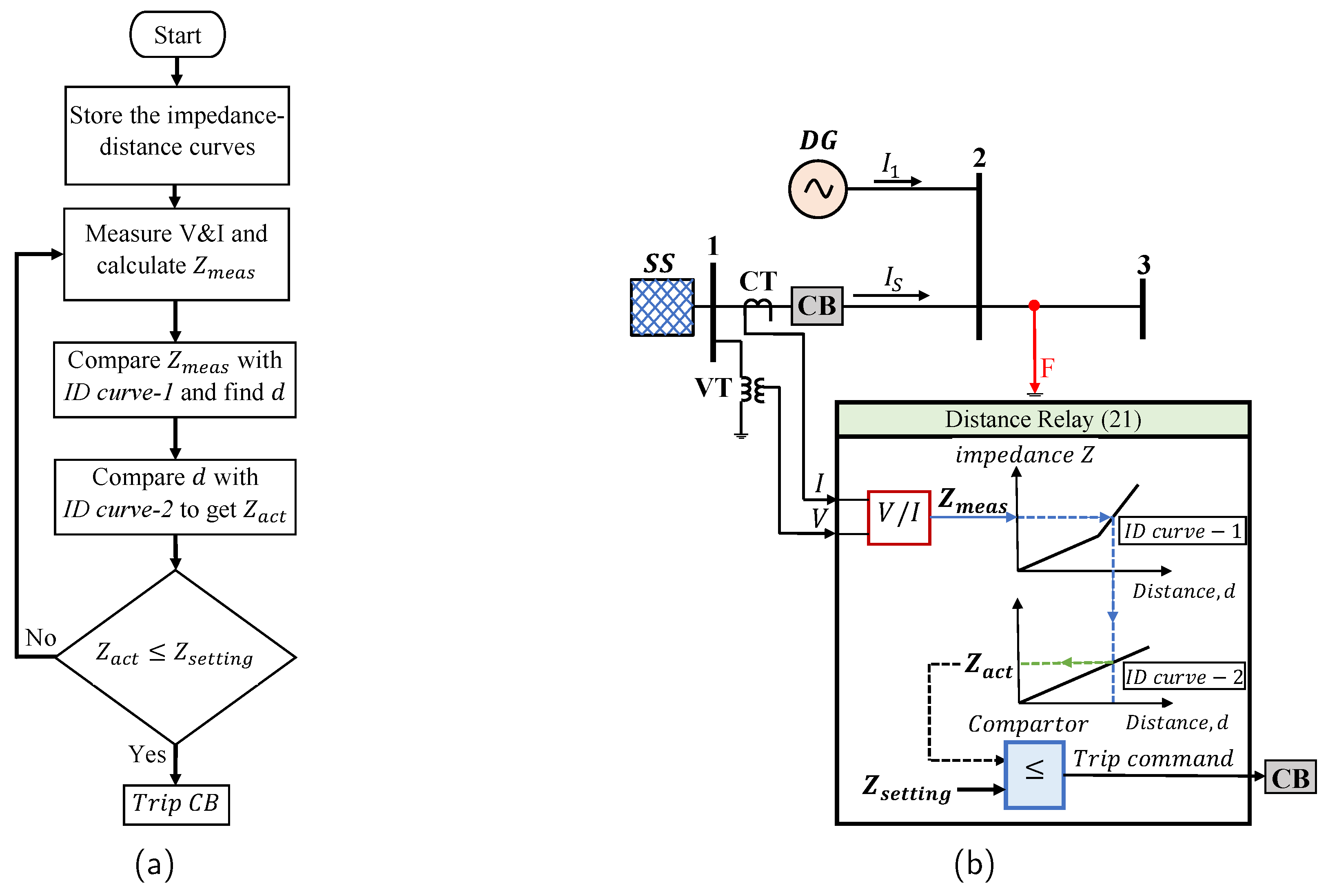
4.3. Method 3
4.3.1. 3LG Fault
4.3.2. SLG Fault
5. Simulation Results
5.1. Test System Description
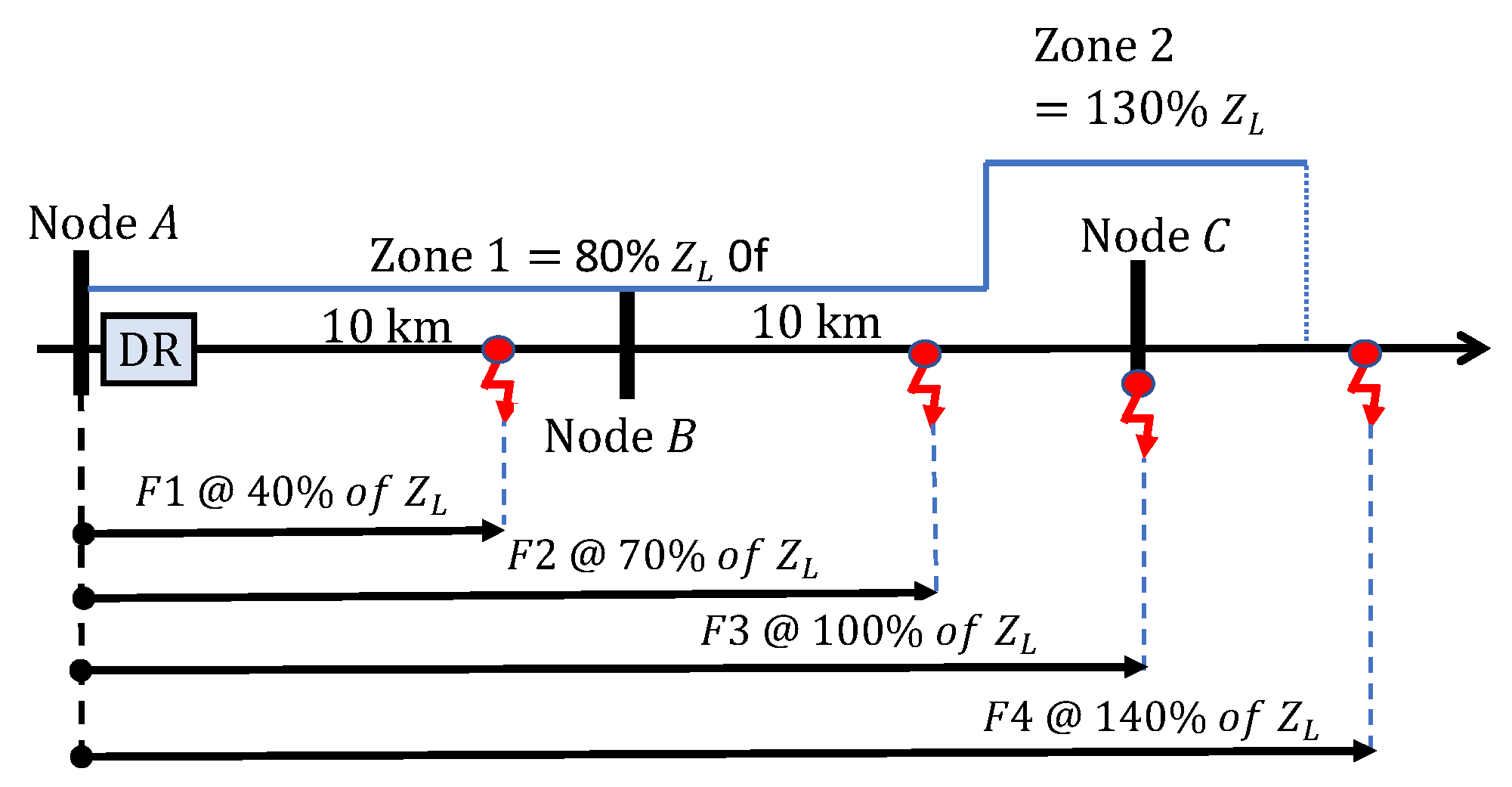
5.2. Distance Relay Settings
5.3. Study Cases
5.3.1. Case I: Fault at a Distance of 40% of the Feeder’s Length
5.3.2. Case II: Fault at a Distance of 70% of the Feeder’s Length
5.3.3. Case III: Fault at a Distance of 100% of the Feeder’s Length
5.3.4. Case IV: Fault at a Distance of 140% of the Feeder’s Length
5.4. Comparison of Methods
- Required data and calculations: All three methods require local measurements and the system’s data in order to determine the fault location in the presence of an infeed current. In addition to the system data and local measurements, the first and second methods require the results of offline calculations in order to determine the fault location. The first method requires calculating the offline fault current values as part of the data to be stored in the DR. Similarly, the second method requires calculating offline fault currents to create ID curves. The third method has an advantage over the first two methods in that it does not require any offline calculations, and its functionality entirely depends on local measurements.
- Cost: The functionality of three methods proposed in this paper do not require the addition of any measuring or communication devices. In other words, the proposed methods do not incur any additional hardware cost to the current system.
- Accuracy of the results: One of the most important indicators of the success for any method is its accuracy. To this end, all of the proposed methods were tested using PSCAD™/EMTDC™ software. The results prove the capability of the proposed methods in locating the faults with high accuracy in the presence of an infeed effect. Method 3 is the least accurate due to its dependence purely on online measurements with no offline calculations, but the drop in accuracy may be counter-balanced by its other advantages.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gonen, T. Electric Power Distribution Engineering; CRC Press: Boca Raton, FL, USA, 2015; p. 768. [Google Scholar]
- Wheeler, K.W.; Elsamahy, M.; Faried, S.O. A Novel Reclosing Scheme for Mitigation of Distributed Generation Effects on Overcurrent Protection. IEEE Trans. Power Deliv. 2018, 33, 981–991. [Google Scholar] [CrossRef]
- Tong, X.; Liu, J. Fault Processing Based on Local Intelligence. In Fault Location and Service Restoration for Electrical Distribution Systems; John Wiley & Sons: Hoboken, NJ, USA, 2016; Chapter 2; p. 32. [Google Scholar]
- El-Khattam, W.; Sidhu, T.S. Restoration of Directional Overcurrent Relay Coordination in Distributed Generation Systems Utilizing Fault Current Limiter. IEEE Trans. Power Deliv. 2008, 23, 576–585. [Google Scholar] [CrossRef]
- Singh, M.; Vishnuvardhan, T.; Srivani, S.G. Adaptive protection coordination scheme for power networks under penetration of distributed energy resources. IET Gener. Transm. Distrib. 2016, 10, 3919–3929. [Google Scholar] [CrossRef]
- Usama, M.; Mokhlis, H.; Moghavvemi, M.; Mansor, N.; Alotaibi, M.; Muhammad, M.; Bajwa, A. A Comprehensive Review on Protection Strategies to Mitigate the Impact of Renewable Energy Sources on Interconnected Distribution Networks. IEEE Access 2021, 9, 35740–35765. [Google Scholar] [CrossRef]
- Sinclair, A.; Finney, D.; Martin, D.; Sharma, P. Distance Protection in Distribution Systems: How It Assists with Integrating Distributed Resources. IEEE Trans. Ind. Appl. 2014, 50, 2186–2196. [Google Scholar] [CrossRef]
- Chang, J.; Gara, L.; Fong, P.; Kyosey, Y. Application of a multifunctional distance protective IED in a 15KV distribution network. In Proceedings of the 2013 66th Annual Conference for Protective Relay Engineers, College Station, TX, USA, 8–11 April 2013; pp. 150–171. [Google Scholar] [CrossRef]
- Enayati, A.; Ortmeyer, T.H. A novel approach to provide relay coordination in distribution power systems with multiple reclosers. In Proceedings of the 2015 North American Power Symposium (NAPS), Charlotte, NC, USA, 4–6 October 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Tsimtsios, A.M.; Nikolaidis, V.C. Setting Zero-Sequence Compensation Factor in Distance Relays Protecting Distribution Systems. IEEE Trans. Power Deliv. 2018, 33, 1236–1246. [Google Scholar] [CrossRef]
- Ziegler, G. Numerical Distance Protection: Principles and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Blackburn, J.L.; Domin, T.J. Protective Relaying: Principles and Applications; CRC Press: Boca Raton, FL, USA, 2015; pp. 600–602. [Google Scholar]
- Gers, J.M.; Holmes, E.J. Protection of Electricity Distribution Networks; IET: London, UK, 2011; Volume 47. [Google Scholar]
- Biswas, S.; Centeno, V. A communication based infeed correction method for distance protection in distribution systems. In Proceedings of the 2017 North American Power Symposium (NAPS), Morgantown, WV, USA, 17–19 September 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Uzubi, U.; Ekwue, A.; Ejiogu, E. Adaptive distance relaying: Solution to challenges of conventional protection schemes in the presence of remote infeeds. Int. Trans. Electr. Energy Syst. 2020, 30, e12330. [Google Scholar] [CrossRef]
- Mishra, P.; Pradhan, A.K.; Bajpai, P. Adaptive Distance Relaying for Distribution Lines Connecting Inverter-Interfaced Solar PV Plant. IEEE Trans. Ind. Electron. 2021, 68, 2300–2309. [Google Scholar] [CrossRef]
- Thakre, M.P.; Kale, V.S. An adaptive approach for three zone operation of digital distance relay with Static Var Compensator using PMU. Int. J. Electr. Power Energy Syst. 2016, 77, 327–336. [Google Scholar] [CrossRef]
- Tsimtsios, A.M.; Korres, G.N.; Nikolaidis, V.C. A pilot-based distance protection scheme for meshed distribution systems with distributed generation. Int. J. Electr. Power Energy Syst. 2019, 105, 454–469. [Google Scholar] [CrossRef]
- Anderson, P.M. Power System Protection; Wiley-IEEE Press: Piscataway, NJ, USA, 1999; p. 379. [Google Scholar]
- Kezunovic, M.; Ren, J.; Lotfifard, S. Design, Modeling and Evaluation of Protective Relays for Power Systems; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Horowitz, S.H.; Phadke, A.G. Power System Relaying; John Wiley & Sons: Hoboken, NJ, USA, 2014; p. 111. [Google Scholar]
- Nikolaidis, V.C.; Tsimtsios, A.M.; Safigianni, A.S. Investigating Particularities of Infeed and Fault Resistance Effect on Distance Relays Protecting Radial Distribution Feeders with DG. IEEE Access 2018, 6, 11301–11312. [Google Scholar] [CrossRef]
- Jones, K.W.; Pourbeik, P.; Kobet, G.; Berner, A.; Fischer, N.; Huang, F.; Holbach, J.; Jensen, M.; O’Connor, J.; Patel, M.; et al. Impact of Inverter Based Generation on Bulk Power System Dynamics and Short-Circuit Performance; Technical Report PES-TR68; IEEE Power & Energy Society: New York, NY, USA, 2018. [Google Scholar]
- International, M.H. PSCAD Version 5.0. Winnipeg, MB, Canada. 2021. Available online: https://www.pscad.com/ (accessed on 30 July 2021).
- Ibrahim, M.A. Disturbance Analysis for Power Systems, 1st ed.; Wiley: Hoboken, NJ, USA, 2011; p. 223. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault | Fault | Zone | Measured Impedance, pu | ||||
|---|---|---|---|---|---|---|---|
| Type | Location | Protection | (pu) | ||||
| 3LG | F1 | 1 | 0.4 | 0.4 | 0.4 | 0.4 | 0.4 |
| F2 | 1 | 0.7 | 2.39 | 0.7 | 0.7 | 0.7 | |
| F3 | 2 | 1.0 | 5.26 | 1.0 | 1.0 | 1.0 | |
| F4 | Out of zones | 1.4 | 9.09 | 1.4 | 1.4 | 1.4 | |
| SLG | F1 | 1 | 0.4 | 0.4 | 0.4 | 0.4 | 0.4 |
| F2 | 1 | 0.7 | 3.69 | 0.7 | 0.7 | 0.68 | |
| F3 | 2 | 1.0 | 8.49 | 1.0 | 1.0 | 1.01 | |
| F4 | Out of zones | 1.4 | 14.84 | 1.4 | 1.4 | 1.48 | |
| Proposed | Required Data | Cost | Accuracy of |
|---|---|---|---|
| Methods | and Calculations | the Results | |
| Method 1 |
| Very low | Very high |
| |||
| |||
| Method 2 |
| Very low | Very high |
| |||
| |||
| Method 3 |
| Very low | High |
|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hariri, F.; Crow, M. New Infeed Correction Methods for Distance Protection in Distribution Systems. Energies 2021, 14, 4652. https://doi.org/10.3390/en14154652
Hariri F, Crow M. New Infeed Correction Methods for Distance Protection in Distribution Systems. Energies. 2021; 14(15):4652. https://doi.org/10.3390/en14154652
Chicago/Turabian StyleHariri, Fahd, and Mariesa Crow. 2021. "New Infeed Correction Methods for Distance Protection in Distribution Systems" Energies 14, no. 15: 4652. https://doi.org/10.3390/en14154652
APA StyleHariri, F., & Crow, M. (2021). New Infeed Correction Methods for Distance Protection in Distribution Systems. Energies, 14(15), 4652. https://doi.org/10.3390/en14154652