
Investigation of the Torque Production Mechanism of Dual-Stator Axial-Field Flux-Switching Permanent Magnet Motors




Abstract
:1. Introduction
2. Experimental and Theoretical Methods
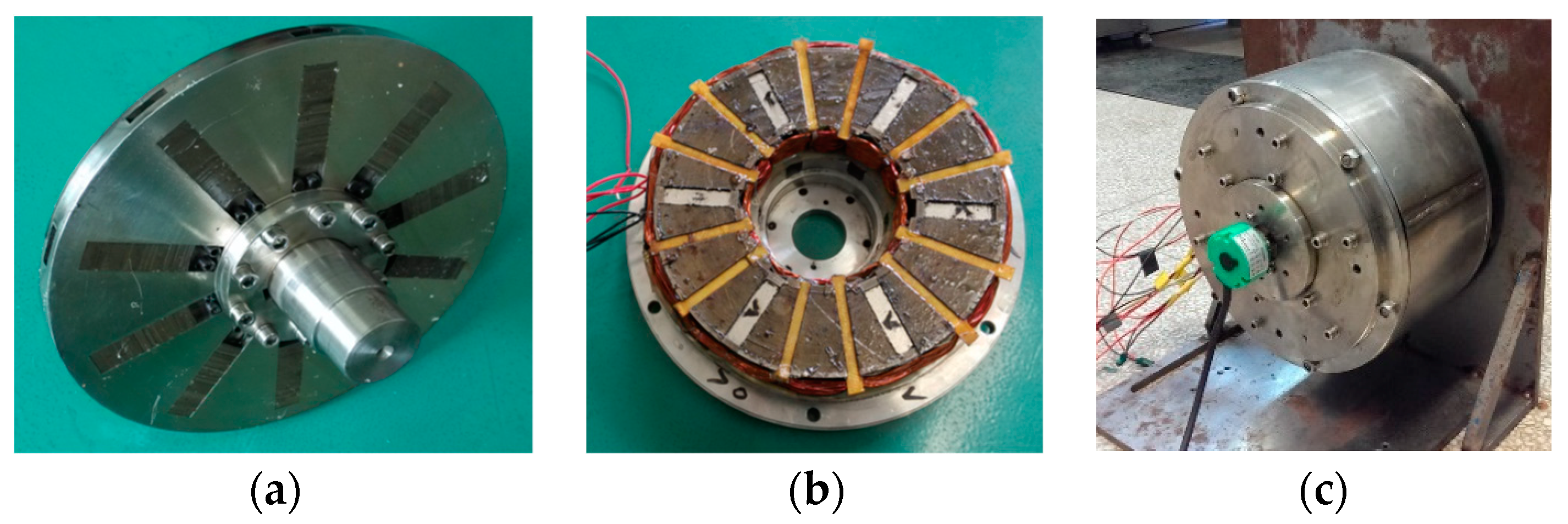
2.1. Machine Topology
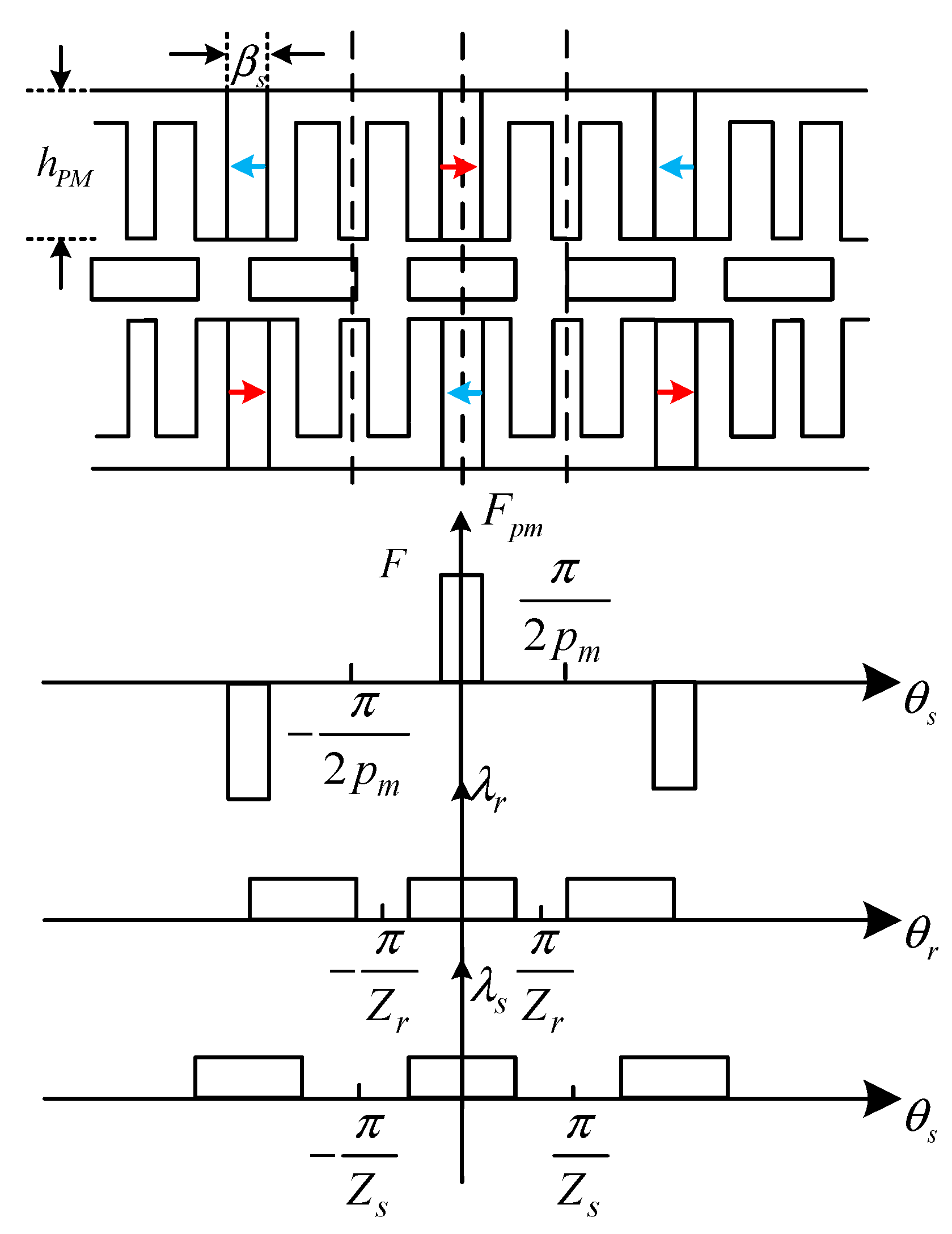
2.2. Operation Principle and Torque Production Mechanism
3. Results and Discussion
3.1. Operation Characteristics of the Machine
3.1.1. No-Load Flux Density
3.1.2. Contributions of the Electromagnetic Torque
3.2. Influence of the Parameters on the Torque Production
3.2.1. Stator-PM Pole-Arc Ratio
3.2.2. Rotor Ratio
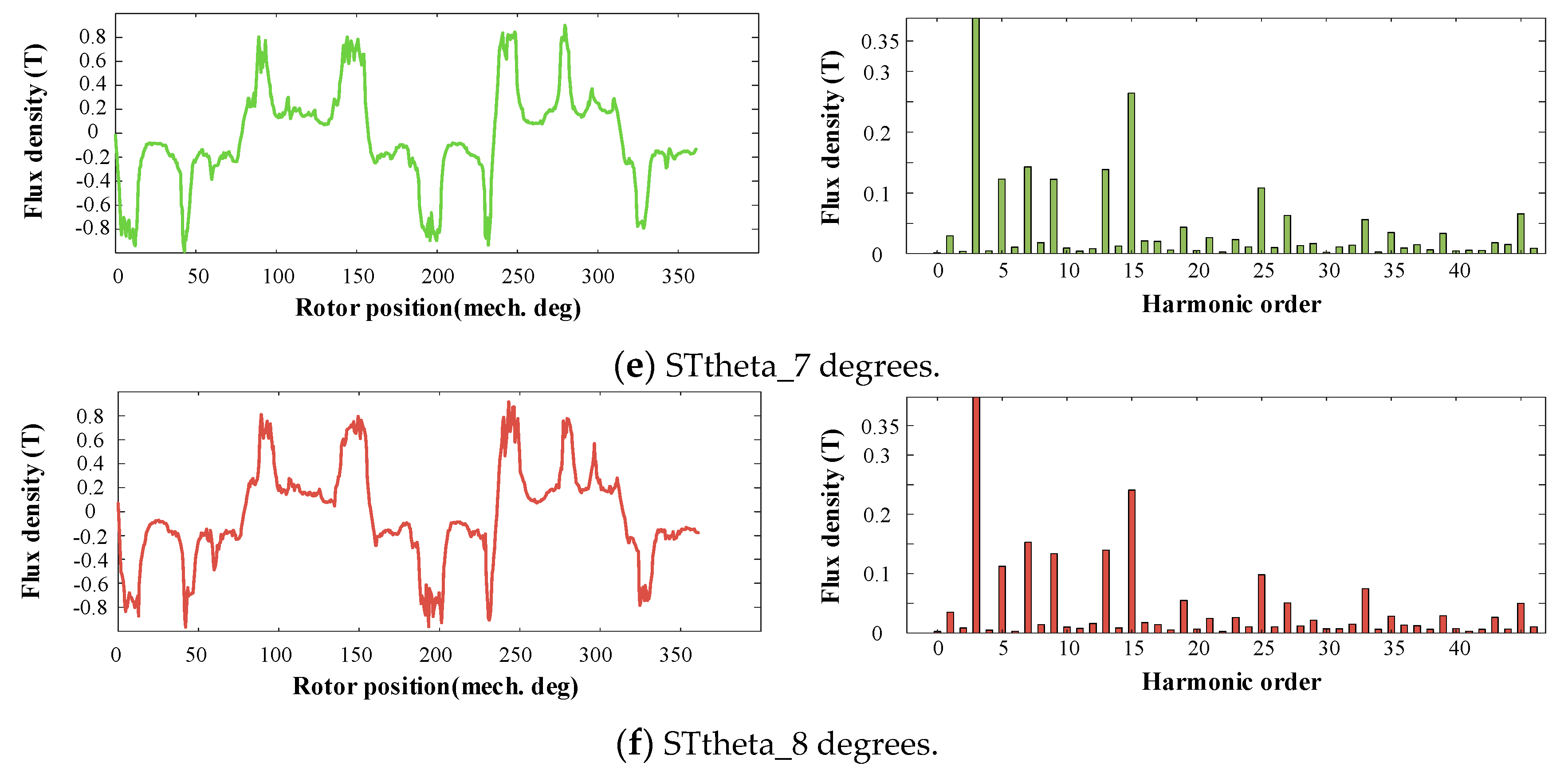
3.2.3. Width of the Stator Tooth
3.2.4. Torque Characteristics after Optimization
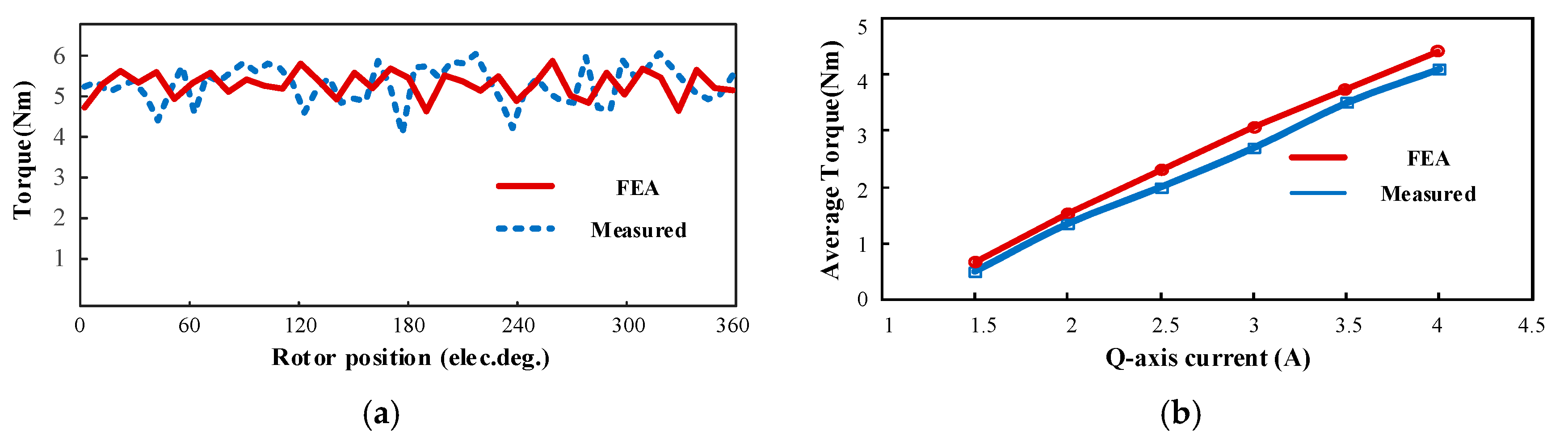
3.3. Experimental Verification
4. Conclusions
- (1)
- The torque of the DSAFFSPM machine is consituted by the modulated field harmonics (th) and the fundamental PM filed harmonics (th) cannot the generate steady torque.
- (2)
- The torque is mainly constituted by the low-order working harmonics, which confirms the field modulation effect in the DSAFFSPM machines.
- (3)
- Each order of PM MMF, each order of the stator permeance, and only the 0th rotor permeance components are responsible for the torque production of the DSAFFSPM machines.
- (4)
- The change of the PM width and stator tooth have nearly no influence on the first harmonic. In particular, when the rotor ratio is chosen as 0.4, the amplitude of the first and seventh harmonics is the highest, resulting in the largest torque.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhu, Z.Q.; Khatab, M.F.; Li, H.; Liu, Y. A novel axial flux magnetically geared machine for power split application. IEEE Trans. Ind. Appl. 2018, 54, 5954–5966. [Google Scholar] [CrossRef]
- Bai, J.; Zheng, P.; Tong, C.; Song, Z.; Zhao, Q. Characteristic analysis and verification of the magnetic-field-modulated brushless double-rotor machine. IEEE Trans. Ind. Electron. 2014, 62, 4023–4033. [Google Scholar] [CrossRef]
- Ji, W.; Ni, F.; Gao, D.; Luo, S.; Lv, Q.; Lv, D. Electromagnetic Design of high-power and high-speed permanent magnet synchronous motor considering loss characteristics. Energies 2021, 14, 3622. [Google Scholar] [CrossRef]
- Zhu, X.; Ji, J.; Xu, L.; Kang, M. Design and analysis of dual-stator PM vernier linear machine with PMs surface-mounted on the mover. IEEE Trans. Appl. Supercond. 2018, 28, 5201605. [Google Scholar] [CrossRef]
- Su, P.; Hua, W.; Wu, Z.; Han, P.; Cheng, M. Analysis of the operation principle for rotor-permanent-magnet flux-switching machines. IEEE Trans. Ind. Electron. 2018, 65, 1062–1073. [Google Scholar] [CrossRef]
- Hua, H.; Hua, W.; Zhao, G.; Cheng, M. Torque production mechanism of switched reluctance machines with air-gap field modulation principle. IEEE Trans. Energy Convers. 2020, 35, 1617–1627. [Google Scholar] [CrossRef]
- Zhu, X.; Hua, W.; Zhao, G. Analysis of open-circuit performances in flux-reversal permanent magnet machines by superposition methods. IEEE Trans. Energy Convers. 2021. Available online: https://ieeexplore.ieee.org/document/9410385 (accessed on 21 April 2021). [CrossRef]
- Hua, W.; Cheng, M.; Zhu, Z.Q.; Howe, D. Analysis and optimization of back-EMF waveform of a flux switching PM motor. IEEE Trans. Energy Convers. 2008, 23, 727–733. [Google Scholar] [CrossRef]
- Cheng, M.; Hua, W.; Zhang, J.; Zhao, W. Overview of stator permanent magnet brushless machines. IEEE Trans. Ind. Electron. 2011, 58, 5087–5101. [Google Scholar] [CrossRef]
- Li, D.; Qu, R.; Li, J.; Xu, W.; Wu, L. Synthesis of flux switching permanent magnet machines. IEEE Trans. Energy Convers. 2016, 31, 106–117. [Google Scholar] [CrossRef]
- Chen, J.T.; Zhu, Z.Q.; Iwasaki, S. A novel E-core switched-flux PM brushless ac machine. IEEE Trans. Ind. Appl. 2011, 47, 1273–1282. [Google Scholar] [CrossRef]
- Zhou, R.; Li, G.; Zhan, K. Performance investigation of consequent-pole PM machines with E-core and C-core modular stators. IEEE Trans. Energy Convers. 2021, 36, 1169–1179. [Google Scholar] [CrossRef]
- Li, Y.; Yang, H.; Lin, H.; Lyu, S.; Pan, Z. Comparative study of stator-consequent-pole permanent magnet machines with different stator-slot configurations. IEEE Trans. Magn. 2019, 55, 8106308. [Google Scholar] [CrossRef]
- Yang, H.; Li, Y.; Lin, H.; Zhu, Z.Q.; Lyu, S. Principle investigation and performance comparison of consequent-pole switched flux PM machines. IEEE Trans. Transport. Electrific. 2021, 7, 766–778. [Google Scholar] [CrossRef]
- Jia, L.; Lin, K.; Lin, M.; Le, W.; Wang, S. Comparative analysis of dual-rotor modular stator axial-flux permanent magnet machines with different rotor topologies. IEEE Trans. Appl. Supercond. 2021, 31, 5204405. [Google Scholar] [CrossRef]
- Zhao, J.; Quan, X.; Sun, X.; Li, J.; Lin, M. Design of a novel axial flux rotor consequent-pole permanent magnet machine. IEEE Trans. Appl. Supercond. 2020, 30, 5205506. [Google Scholar] [CrossRef]
- Jia, L.; Lin, M.; Le, W.; Li, N.; Kong, Y. Dual-skew magnet for cogging torque minimization of axial flux PMSM with segmented stator. IEEE Trans. Magn. 2020, 56, 7507306. [Google Scholar] [CrossRef]
- Li, N.; Zhu, J.; Lin, M.; Yang, G.; Kong, Y.; Hao, L. Analysis of axial field flux-switching memory machine based on 3-d magnetic equivalent circuit network considering magnetic hysteresis. IEEE Trans. Magn. 2019, 55, 7203104. [Google Scholar] [CrossRef]
- Xu, D.; Lin, M.; Fu, X.; Hao, L.; Zhang, W.; Li, N. Cogging torque reduction of a hybrid axial field flux-switching permanent-magnet machine with three methods. IEEE Trans. Appl. Supercond. 2016, 26, 5201305. [Google Scholar] [CrossRef]
- Zhang, W.; Liang, X.; Lin, M.; Hao, L.; Li, N. Design and analysis of novel hybrid-excited axial field flux-switching permanent magnet machines. IEEE Trans. Appl. Supercond. 2016, 26, 5201005. [Google Scholar] [CrossRef]
- Zhang, W.; Liang, X.; Lin, M. Analysis and comparison of axial field flux-switching permanent magnet machines with three different stator cores. IEEE Trans. Appl. Supercond. 2016, 26, 0607806. [Google Scholar] [CrossRef]
- Wang, S.; Lin, K.; Lin, M. Comparative study of E- and U-core modular dual-stator axial-field flux-switching permanent magnet motors with different stator/rotor-pole combinations based on flux modulation principle. IEEE Access 2021, 9, 78635–78647. [Google Scholar] [CrossRef]
- Gaussens, B.; De la Barrière, O.; Hoang, E.; Saint-Michel, J.; Manfe, P.; Lécrivain, M.; Gabsi, M. Magnetic field solution in doubly slotted airgap of conventional and alternate field-excited switched-flux topologies. IEEE Trans. Magn. 2013, 49, 5083–5096. [Google Scholar] [CrossRef]
- Heller, B.; Hamata, V. Harmonic Field Effects in Induction Machines; Elsevier: Amsterdam, The Netherlands, 1977. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item and Symbol | Value | Item and Symbol | Value |
|---|---|---|---|
| Phase, m | 3 | Inside stator diameter, Dsi (mm) | 110.2 |
| Number of stator teeth, Zs | 6 | Rotor axial length, lr (mm) | 14 |
| Pole number of stator-PMs, pm | 3 | Stator axial length, ls (mm) | 25.5 |
| Number of rotor salient poles, Zr | 10 | Air-gap length, ga (mm) | 1 |
| Pole number of armature windings, pa | 7 | PM width, hpm (mm) | 6 |
| Outside stator diameter, Dso (mm) | 198.4 |
| Harmonic Type | Harmonic Pole-Pairs | Fk, λrj, and λsi | 6/10 E-Core | Speed | |
|---|---|---|---|---|---|
| Stationary | kpm | pm, 3pm 5pm … | …….. | 3, 9, 15,… | 0 |
| (k± 2i)pm | 0 | ||||
| Rotating | kpm±Zr & (k± 2i)pm ∓ Zr | pm + Zr | F1, λr1, λs0, F1, λr1, λs1, F3, λr1, λs1, | 13 | ZrΩ/pm + Zr |
| −pm + Zr | 7 | −ZrΩ/Zr − pm | |||
| −3pm + Zr | F1, λr1, λs1, F3, λr1, λs0, F3, λr1, λs3, | 1 | −ZrΩ/3pm − Zr | ||
| 3pm + Zr | 19 | ZrΩ /3pm + Zr | |||
| 5pm − Zr | F1, λr1, λs3, F3, λr1, λs1, | 5 | −ZrΩ/5pm − Zr | ||
| 5pm + Zr | 25 | ZrΩ /5pm + Zr | |||
| 7pm − Zr | F1, λr1, λs3, | 11 | −ZrΩ/7pm − Zr | ||
| Item | Amplitudes of the Harmonics (T) | Average Torque (Nm) | Torque Proportion (%) |
|---|---|---|---|
| −3pm + Zr, 1st | 0.03 | 1.59 | 32.7 |
| 5pm − Zr, 5th | 0.10 | 1.06 | 21.8 |
| −pm + Zr, 7th | 0.14 | 1.06 | 21.8 |
| 7pm − Zr, 11th | 0.03 | 0.14 | 2.9 |
| pm + Zr, 13th | 0.14 | 0.56 | 11.7 |
| 3pm + Zr, 19th | 0.08 | 0.22 | 4.6 |
| 5pm + Zr, 25th | 0.10 | 0.21 | 4.4 |
| sum | 4.84(analytical)/4.98(FEA) | 99.9 |
| PM Width (mm) | 5 mm | 6 mm | 9 mm | 12 mm | 15 mm |
|---|---|---|---|---|---|
| Torque average (N.m) | 5.43 | 5.48 | 5.65 | 4.70 | 3.59 |
| Torque ripple (%) | 5.67 | 6.37 | 8.23 | 28.23 | 79.70 |
| Harmonic Order | 1 | 5 | 7 | 11 | 13 | 19 | 25 | 3 | 9 | 15 |
|---|---|---|---|---|---|---|---|---|---|---|
| 5 mm | 0.04 | 0.11 | 0.14 | 0.01 | 0.13 | 0.04 | 0.09 | 0.36 | 0.12 | 0.23 |
| 6 mm | 0.04 | 0.11 | 0.15 | 0.01 | 0.14 | 0.05 | 0.10 | 0.40 | 0.13 | 0.24 |
| 9 mm | 0.04 | 0.12 | 0.17 | 0.02 | 0.18 | 0.07 | 0.10 | 0.50 | 0.17 | 0.25 |
| 12 mm | 0.03 | 0.1 | 0.21 | 0.03 | 0.22 | 0.08 | 0.09 | 0.57 | 0.20 | 0.22 |
| 15 mm | 0.03 | 0.08 | 0.24 | 0.04 | 0.24 | 0.09 | 0.07 | 0.63 | 0.20 | 0.17 |
| Rotor Ratio | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 |
|---|---|---|---|---|---|
| Torque average (N.m) | 4.71 | 5.74 | 5.52 | 4.90 | 4.33 |
| Torque ripple (%) | 12.15 | 5.85 | 6.17 | 7.45 | 6.70 |
| Harmonic Order | 1 | 5 | 7 | 11 | 13 | 19 | 25 | 3 | 9 | 15 |
|---|---|---|---|---|---|---|---|---|---|---|
| 0.3 | 0.03 | 0.11 | 0.14 | 0.03 | 0.14 | 0.04 | 0.09 | 0.36 | 0.12 | 0.20 |
| 0.4 | 0.04 | 0.11 | 0.16 | 0.02 | 0.14 | 0.04 | 0.10 | 0.38 | 0.13 | 0.22 |
| 0.5 | 0.04 | 0.11 | 0.15 | 0.01 | 0.14 | 0.05 | 0.10 | 0.40 | 0.13 | 0.24 |
| 0.6 | 0.04 | 0.11 | 0.15 | 0.01 | 0.13 | 0.06 | 0.09 | 0.42 | 0.15 | 0.25 |
| 0.7 | 0.03 | 0.10 | 0.13 | 0.02 | 0.12 | 0.05 | 0.09 | 0.44 | 0.16 | 0.27 |
| Stator Tooth Width | 3 deg. | 4 deg. | 5 deg. | 6 deg. | 7 deg. | 8 deg. |
|---|---|---|---|---|---|---|
| Torque average (N.m) | 4.54 | 4.88 | 5.09 | 5.39 | 5.56 | 5.46 |
| Torque ripple (%) | 198.85 | 145.51 | 85.71 | 50.8 | 9.72 | 5.64 |
| Harmonic Order | 1 | 5 | 7 | 11 | 13 | 19 | 25 | 3 | 9 | 15 |
|---|---|---|---|---|---|---|---|---|---|---|
| 3 degrees | 0.04 | 0.11 | 0.10 | 0.03 | 0.09 | 0.04 | 0.11 | 0.30 | 0.12 | 0.28 |
| 4 degrees | 0.04 | 0.12 | 0.11 | 0.02 | 0.10 | 0.04 | 0.11 | 0.32 | 0.13 | 0.29 |
| 5 degrees | 0.04 | 0.12 | 0.12 | 0.01 | 0.11 | 0.04 | 0.11 | 0.35 | 0.12 | 0.28 |
| 6 degrees | 0.04 | 0.12 | 0.14 | 0.01 | 0.12 | 0.04 | 0.11 | 0.37 | 0.12 | 0.28 |
| 7 degrees | 0.04 | 0.12 | 0.14 | 0.00 | 0.14 | 0.04 | 0.11 | 0.39 | 0.12 | 0.26 |
| 8 degrees | 0.03 | 0.11 | 0.15 | 0.01 | 0.14 | 0.05 | 0.10 | 0.40 | 0.13 | 0.24 |
| Item | Amplitudes of the Harmonics (before/after) T | Average Torque (before/after) Nm | Torque Proportion (before/after) % |
|---|---|---|---|
| −3pm + Zr, 1st | 0.03/0.04 | 1.63/2.13 | 32.7/39.1 |
| 5pm − Zr, 5th | 0.10/0.11 | 1.09/1.18 | 21.8/21.6 |
| −pm + Zr, 7th | 0.14/0.15 | 1.09/1.15 | 21.8/21.1 |
| 7pm − Zr, 11th | 0.03/0.01 | 0.14/0.05 | 2.9/0.89 |
| pm + Zr, 13th | 0.14/0.14 | 0.58/0.58 | 11.7/10.6 |
| 3pm + Zr, 19th | 0.08/0.05 | 0.23/0.14 | 4.6/2.6 |
| 5pm + Zr, 25th | 0.10/0.10 | 0.22/0.21 | 4.4/3.9 |
| sum | 4.98/5.45 | 99.9/99.79 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Lin, M.; Lin, K.; Kong, Y. Investigation of the Torque Production Mechanism of Dual-Stator Axial-Field Flux-Switching Permanent Magnet Motors. Energies 2021, 14, 5498. https://doi.org/10.3390/en14175498
Wang S, Lin M, Lin K, Kong Y. Investigation of the Torque Production Mechanism of Dual-Stator Axial-Field Flux-Switching Permanent Magnet Motors. Energies. 2021; 14(17):5498. https://doi.org/10.3390/en14175498
Chicago/Turabian StyleWang, Shuai, Mingyao Lin, Keman Lin, and Yong Kong. 2021. "Investigation of the Torque Production Mechanism of Dual-Stator Axial-Field Flux-Switching Permanent Magnet Motors" Energies 14, no. 17: 5498. https://doi.org/10.3390/en14175498
APA StyleWang, S., Lin, M., Lin, K., & Kong, Y. (2021). Investigation of the Torque Production Mechanism of Dual-Stator Axial-Field Flux-Switching Permanent Magnet Motors. Energies, 14(17), 5498. https://doi.org/10.3390/en14175498