
Quantitative Performance Comparison of Thermal Structure Function Computations


Abstract
:1. Introduction
2. Network Identification by Deconvolution
2.1. Linear Responses
2.2. Thermal Equivalence Networks
2.3. Logarithmic Time
2.4. Network Identification
2.5. Inverse Calculations
3. Methodology
3.1. Measures of Accuracy
3.2. Computations in the Presence of Noise
4. Algorithmic Details
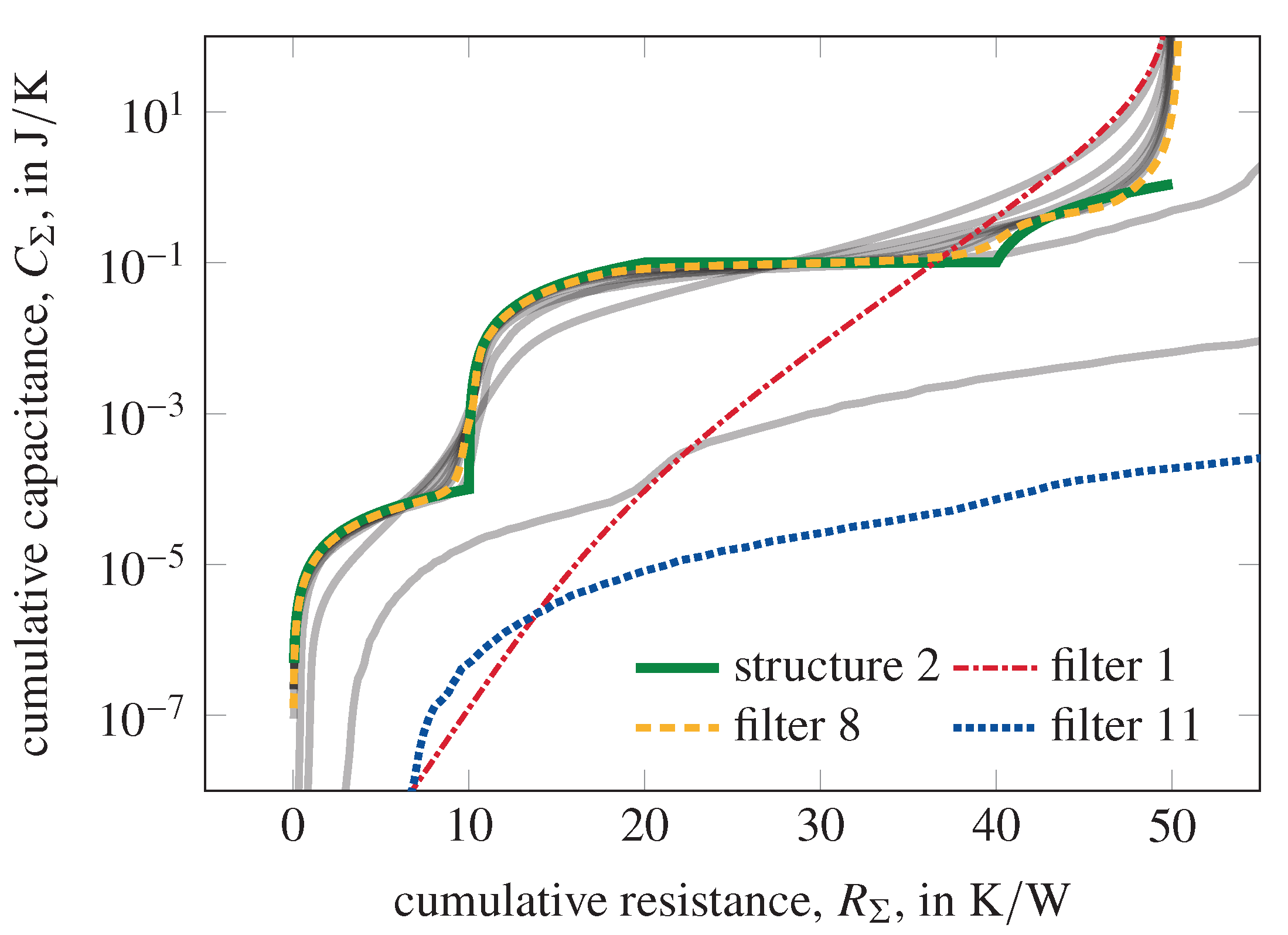
4.1. Optimal Regression Filtering
4.2. Deconvolution
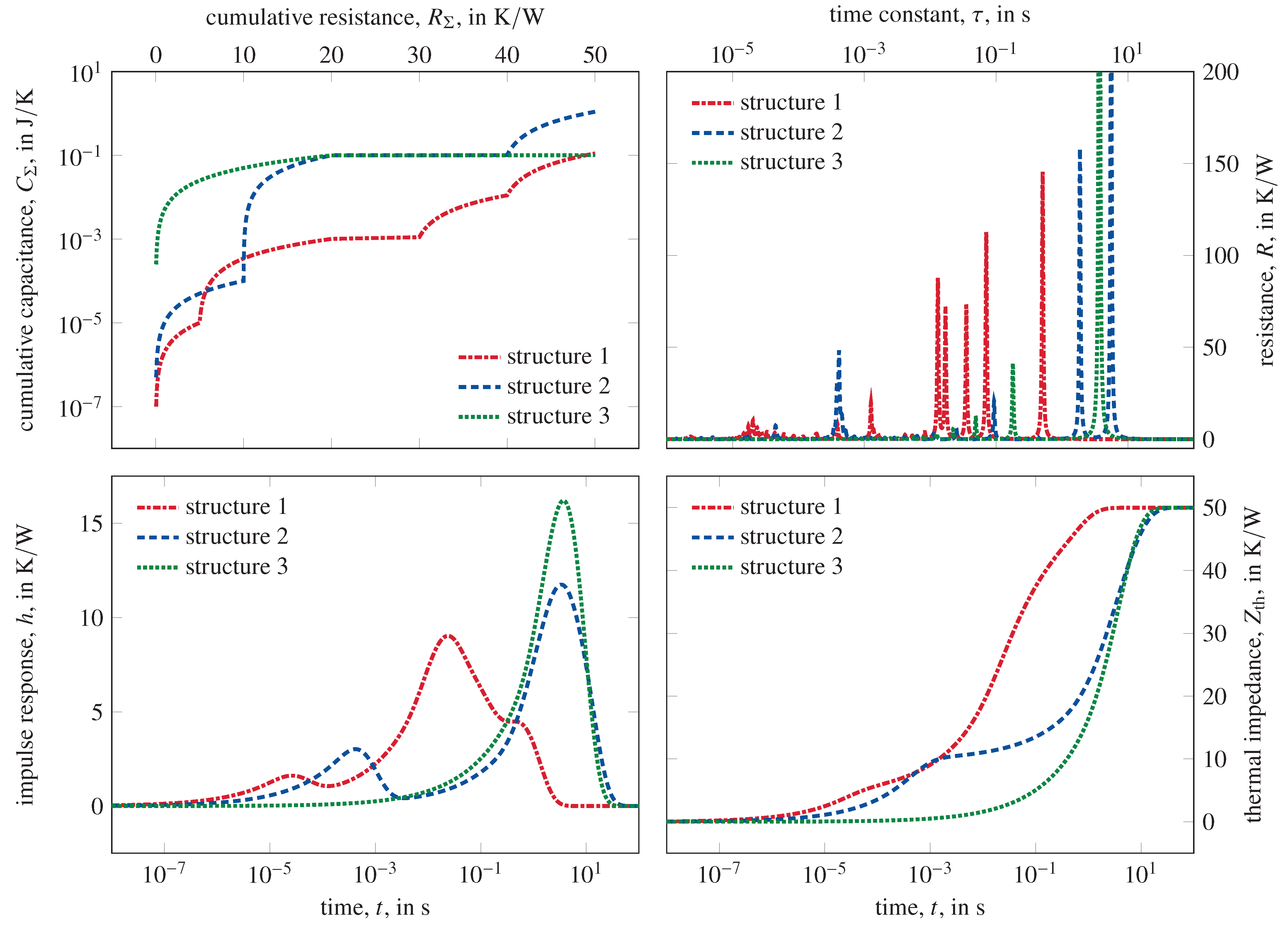
5. Reference Structures
6. Performance Quantification
6.1. Parameter Comparison
6.2. Performance in the Case of Perfect Data
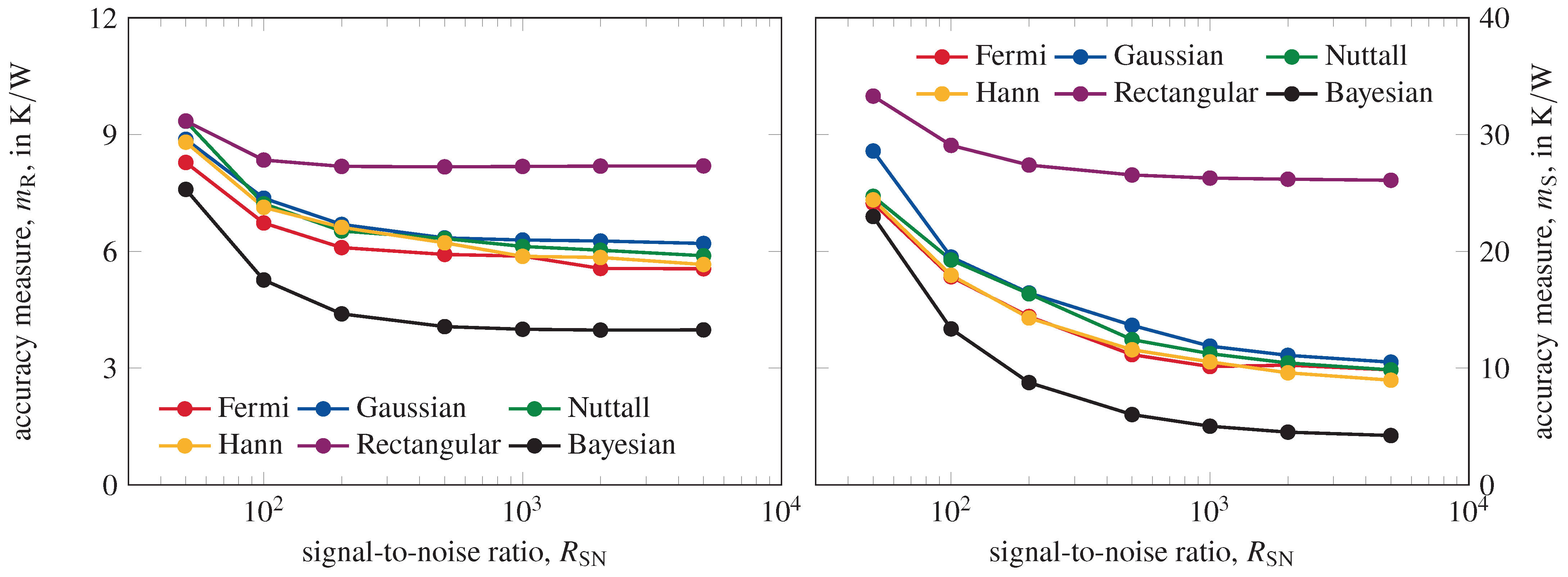
6.3. Performance in Presence of Noise
7. Conclusions
8. Patents
Author Contributions
Funding
Conflicts of Interest
References
- Codecasa, L.; Viti, F.D.; Race, S.; d’Alessandro, V.; Gualandris, D.; Morelli, A.; Villa, C.M. Thermal resistance and impedance calculator (TRIC). In Proceedings of the 25th International Workshop on Thermal Investigations of ICs and Systems (THERMINIC), Lecco, Italy, 25–27 September 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Ezzahri, Y.; Shakouri, A. Application of network identification by deconvolution method to the thermal analysis of the pump-probe transient thermoreflectance signal. Rev. Sci. Instrum. 2009, 80, 074903. [Google Scholar] [CrossRef] [PubMed]
- Farkas, G.; Haque, S.; Wall, F.; Martin, P.S.; Poppe, A.; van Voorst Vader, Q.; Bognar, G. Electric and thermal transient effects in high power optical devices. In Proceedings of the Twentieth Annual IEEE Semiconductor Thermal Measurement and Management Symposium, San Jose, CA, USA, 11 March 2004; pp. 168–176. [Google Scholar] [CrossRef]
- Kim, H.H.; Choi, S.H.; Shin, S.H.; Lee, Y.K.; Choi, S.M.; Yi, S. Thermal transient characteristics of die attach in high power LED PKG. Microelectron. Reliab. 2008, 48, 445–454. [Google Scholar] [CrossRef]
- Székely, V.; Van Bien, T. Fine structure of heat flow path in semiconductor devices: A measurement and identification method. Solid-State Electron. 1988, 31, 1363–1368. [Google Scholar] [CrossRef]
- JC-15. Transient Dual Interface Test Method for the Measurement of the Thermal Resistance Junction to Case of Semiconductor Devices with Heat Flow trough a Single Path; Standard JESD51-14; JEDEC Solid State Technology Association: Arlington, TX, USA, 2010. [Google Scholar]
- Lasance, C.J.M.; Poppe, A. Thermal Management for LED Applications; Solid State Lighting Technology and Application Series; Springer: New York, NY, USA, 2016. [Google Scholar]
- Schweitzer, D.; Pape, H.; Chen, L. Transient measurement of the junction-to-case thermal resistance using structure functions: Chances and limits. In Proceedings of the Twenty-fourth Annual IEEE Semiconductor Thermal Measurement and Management Symposium, San Jose, CA, USA, 16–20 March 2008; pp. 191–197. [Google Scholar] [CrossRef]
- Schmid, M.; Bhogaraju, S.K.; Hanss, A.; Elger, G. A New Noise-Suppression Algorithm for Transient Thermal Analysis in Semiconductors Over Pulse Superposition. IEEE Trans. Instrum. Meas. 2021, 70, 1–9. [Google Scholar] [CrossRef]
- Salleras, M.; Palacin, J.; Carles, G.; Marco, S. Difficulties on the estimation of the thermal structure function from noisy thermal impedance transients. In Proceedings of the International Conference on Thermal and Mechanical Simulation and Experiments in Microelectronics and Micro-Systems, Como, Italy, 24–26 April 2006; pp. 1–7. [Google Scholar] [CrossRef]
- Szalai, A.; Székely, V. Possible acception criteria for structure functions. Microelectron. J. 2012, 43, 164–168. [Google Scholar] [CrossRef]
- Schmid, M.; Hanss, A.; Bhogaraju, S.K.; Elger, G. Time saving averaging algorithm for transient thermal analyses over deterministic pulse superposition. In Proceedings of the 25th International Workshop on Thermal Investigations of ICs and Systems (THERMINIC), Lecco, Italy, 25–27 September 2019. [Google Scholar] [CrossRef]
- Székely, V. Identification of RC networks by deconvolution: Chances and limits. IEEE Trans. Circuits Syst. Fundam. Theory Appl. 1998, 45, 244–258. [Google Scholar] [CrossRef]
- Pareek, K.A.; Grosse, C.; Sternberg, M.; May, D.; Ras, M.A.; Wunderle, B. Effect of Different Deconvolution Methods on Structure Function Calculation. In Proceedings of the 26th International Workshop on Thermal Investigations of ICs and Systems (THERMINIC), Berlin, Germany, 24 September 2020; pp. 97–104. [Google Scholar] [CrossRef]
- Prabhu, K. Window Functions and Their Applications in Signal Processing; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Székely, V. THERMODEL: A tool for compact dynamic thermal model generation. Microelectron. J. 1998, 29, 257–267. [Google Scholar] [CrossRef]
- Press, W.H.; Teukolsky, S.A.; Vetterling, W.T.; Flannery, B.P. Numerical Recipes 3rd Edition: The Art of Scientific Computing, 3rd ed.; Cambridge University Press: Cambridge, MA, USA, 2007. [Google Scholar]
- Szekely, V. Evaluation of short pulse thermal transient measurements. In Proceedings of the 14th International Workshop on Thermal Inveatigation of ICs and Systems, Rome, Italy, 24–26 September 2008; pp. 20–25. [Google Scholar] [CrossRef]
- Kennett, T.J.; Prestwich, W.V.; Robertson, A. Bayesian deconvolution I: Convergent properties. Nuclear Instrum. Methods 1978, 151, 285–292. [Google Scholar] [CrossRef]
- Kennett, T.J.; Prestwich, W.V.; Robertson, A. Bayesian deconvolution II: Noise properties. Nuclear Instrum. Methods 1978, 151, 293–301. [Google Scholar] [CrossRef]
- Kennett, T.J.; Brewster, P.M.; Prestwich, W.V.; Robertson, A. Bayesian deconvolution III: Applications and algorithm implementation. Nuclear Instrum. Methods 1978, 153, 125–135. [Google Scholar] [CrossRef]
- Ziegeler, N.J.; Nolte, P.W.; Schweizer, S. Thermal Equivalence Networks for Analysis of Transient Thermographic Data. In Proceedings of the 26th International Workshop on Thermal Investigations of ICs and Systems (THERMINIC), Berlin, Germany, 24 September 2020; pp. 226–231. [Google Scholar] [CrossRef]
- Székely, V. Enhancing reliability with thermal transient testing. Microelectron. Reliab. 2002, 42, 629–640. [Google Scholar] [CrossRef]
- Codecasa, L.; D’Amore, D.; Maffezzoni, P. Physical interpretation and numerical approximation of structure functions of components and packages. In Proceedings of the Semiconductor Thermal Measurement and Management IEEE Twenty First Annual IEEE Symposium, San Jose, CA, USA, 15–17 March 2005; pp. 146–153. [Google Scholar] [CrossRef]
- Gerstenmaier, Y.C.; Kiffe, W.; Wachutka, G. Combination of thermal subsystems modeled by rapid circuit transformation. In Proceedings of the 13th International Workshop on Thermal Investigation of ICs and Systems (THERMINIC), Budapest, Hungary, 17–19 September 2007; pp. 115–120. [Google Scholar] [CrossRef]
- Khatwani, K.J.; Bajwa, J.; Singh, H. Determining elements of lossy ladder networks. Electron. Lett. 1976, 12, 87–88. [Google Scholar] [CrossRef]
- Codecasa, L.; d’Alessandro, V.; Catalano, A.P.; Scognamillo, C.; D’Amore, D.; Aufinger, K. Accurate and efficient algorithm for computing structure functions from the spatial distribution of thermal properties in electronic devices. IEEE Trans. Electron Devices 2021, 1–8. [Google Scholar] [CrossRef]
- Codecasa, L.; Catalano, A.P.; d’Alessandro, V. A priori error bound for moment matching approximants of thermal models. IEEE Trans. Components Packag. Manuf. Technol. 2019, 9, 2383–2392. [Google Scholar] [CrossRef]
- Chen, W.K. Feedback, Nonlinear, and Distributed Circuits, The Circuits and Filters Handbook, 3rd ed.; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Krishnan, S.R.; Seelamantula, C.S. On the selection of optimum savitzky-golay filters. IEEE Trans. Signal Process. 2013, 61, 380–391. [Google Scholar] [CrossRef]
- Nuttall, A. Some windows with very good sidelobe behavior. IEEE Trans. Acoust. Speech Signal Process. 1981, 29, 84–91. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structure 1 | Structure 2 | Structure 3 | ||||
|---|---|---|---|---|---|---|
| Sections | K/W | J/K | K/W | J/K | K/W | J/K |
| Section 1 | 5 | 1 × 10 | 10 | 1 × 10 | 20 | 1 × 10 |
| Section 2 | 15 | 1 × 10 | 10 | 1 × 10 | 20 | 1 × 10 |
| Section 3 | 10 | 1 × 10 | 10 | 1 × 10 | 10 | 1 × 10 |
| Section 4 | 10 | 1 × 10 | 10 | 1 × 10 | - | - |
| Section 5 | 10 | 1 × 10 | 10 | 1 × 10 | - | - |
| 5.00 | 3.50 | 2.00 | 1.50 | 0.50 | 0.10 | 0.03 | |
| 2.82% | 1.98% | 1.15% | 0.87% | 0.32% | 0.09% | 0.05% |
| Structure 1 | Structure 2 | Structure 3 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Method | K/W | K/W | K/W | K/W | K/W | K/W | K/W | K/W | K/W |
| Fermi | 4.7 | 7.7 | 0.06 | 5.8 | 9.6 | 0.91 | 8.1 | 16.3 | 2.91 |
| Gaussian | 5.1 | 8.9 | 0.08 | 7.6 | 09.4 | 0.27 | 9.3 | 13.8 | 0.09 |
| Nuttall | 4.7 | 8.2 | 0.12 | 6.8 | 8.5 | 0.38 | 10.1 | 11.5 | 0.15 |
| Hann | 4.4 | 7.4 | 0.28 | 6.3 | 7.5 | 0.44 | 8.9 | 10.8 | 0.91 |
| Rectangular | 4.0 | 38.7 | 6.94 | 5.4 | 41.4 | 6.31 | 7.6 | 129 | 31.08 |
| Bayesian | 3.4 | 3.7 | 0.04 | 3.8 | 4.4 | 0.02 | 5.7 | 3.1 | 0.01 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ziegeler, N.J.; Nolte, P.W.; Schweizer, S. Quantitative Performance Comparison of Thermal Structure Function Computations. Energies 2021, 14, 7068. https://doi.org/10.3390/en14217068
Ziegeler NJ, Nolte PW, Schweizer S. Quantitative Performance Comparison of Thermal Structure Function Computations. Energies. 2021; 14(21):7068. https://doi.org/10.3390/en14217068
Chicago/Turabian StyleZiegeler, Nils J., Peter W. Nolte, and Stefan Schweizer. 2021. "Quantitative Performance Comparison of Thermal Structure Function Computations" Energies 14, no. 21: 7068. https://doi.org/10.3390/en14217068
APA StyleZiegeler, N. J., Nolte, P. W., & Schweizer, S. (2021). Quantitative Performance Comparison of Thermal Structure Function Computations. Energies, 14(21), 7068. https://doi.org/10.3390/en14217068