3.1. Simulation Results
First, the reference case was simulated assuming an unloaded vehicle (kerb mass plus driver) and zero wind (zero road gradient, too). The results for the reference case are listed in
Table 5, including a phase-by-phase breakdown of the cycle.
The estimated increase in fuel/energy consumption and emissions, vis-à-vis the zero-wind case, is tabulated in
Table 6 for all sites, including the relevant accuracy of the estimate.
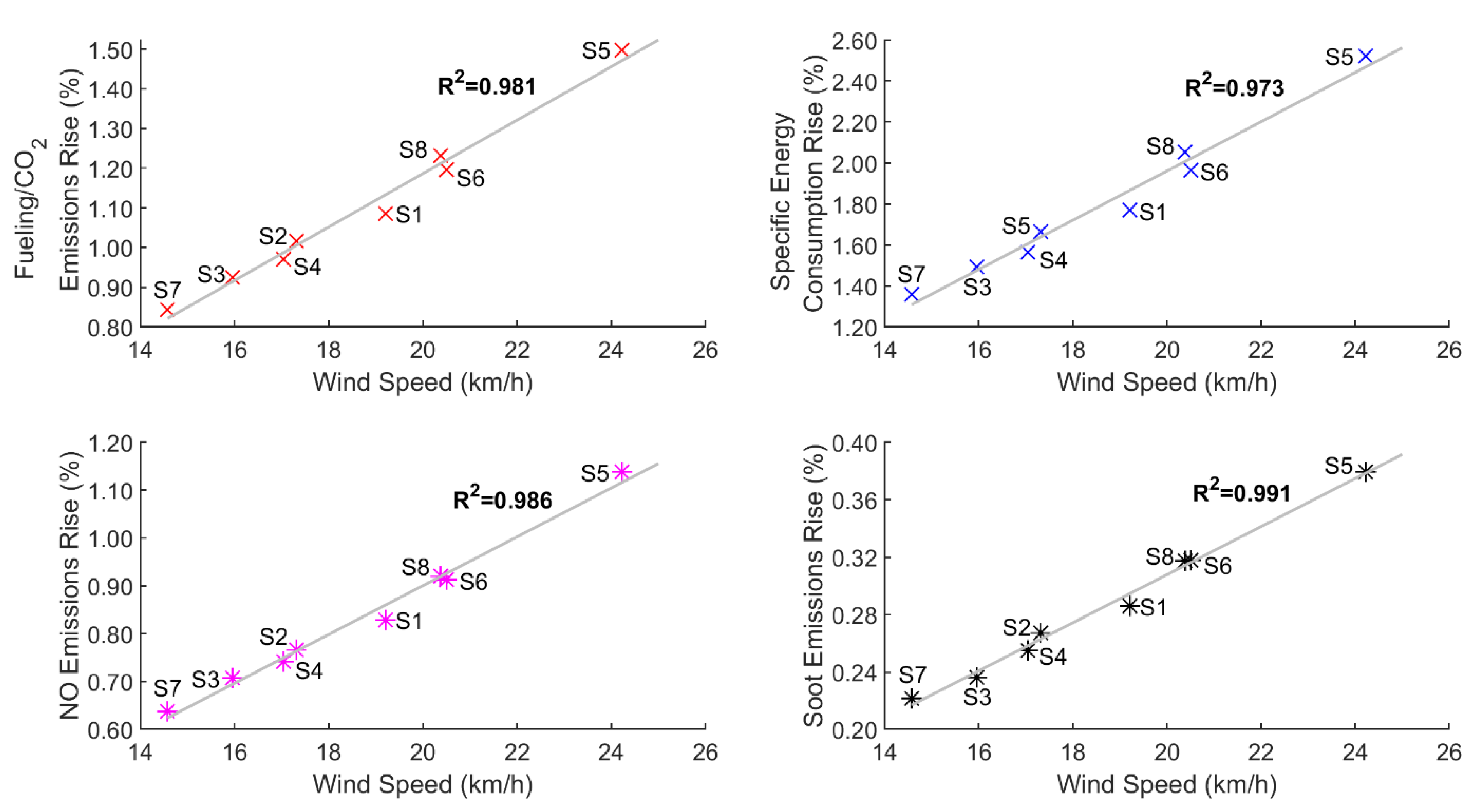
Figure 4 plots the percentage increase against the mean wind for each site, with the aim of providing insight into the relation between the two. This mean wind for each site was taken to be the Weibull mean (see Equation (5)) for the extra-high phase of the cycle at 10 m above ground. The relevant diurnal wind speed correction factor CF (Equation (10)) was also taken into account.
The windiest site was site 5, with a mean wind speed of 24.2 km/h, whereas the least windy one was site 7, which exhibited a mean wind speed of 14.6 km/h. There was a strong correlation between the percentage rise in emissions and mean wind speed. Specific energy consumption was the property most influenced from the presence of ambient wind, with the percentage increase, vis-à-vis the zero-wind case, being equal to 1.80% on average (max = 2.52%, min = 1.36%, S = 0.38%). Fuel consumption (hence CO2 emissions) followed, with the average increase being 1.10% (max = 1.50%, min = 0.84%, S = 0.22%), whereas NO emissions were modestly increased by 0.83% (max = 1.14%, min = 0.64%, S = 0.16%). Soot was the least influenced property, with its average rise being equal to 0.28%.
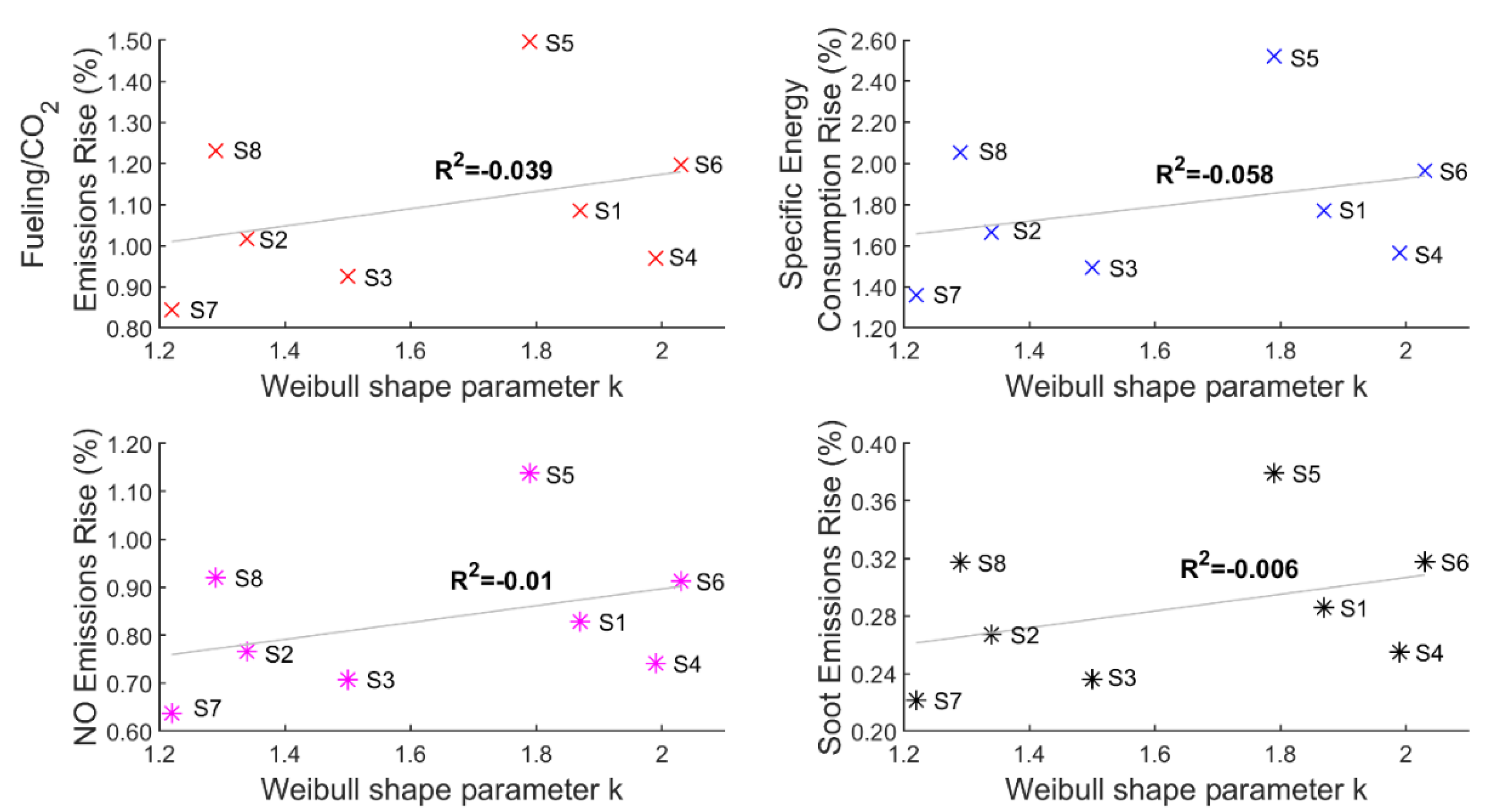
Figure 5 plots the increase in all properties of interest with respect to the Weibull scale parameter c (neglecting CF), and
Figure 6 does the same, this time with regards to the Weibull shape parameter k. The increase in fuel/energy consumption, as well as NO and soot emissions, correlated well with the scale parameter c (
Figure 5), whereas that was not the case at all when it came to the shape parameter k (
Figure 6).
3.2. Correlation of Performance and Emissions with Wind Speed and Direction for Individual Trips
The above results give a solid estimate of how much the real-world values for fuel consumption and emissions are expected to vary from the type-approval ones, if the effect of ambient wind is accounted for. In other words, this is the increase that we expect to see from a vehicle being driven in said wind environment over a long period of time. This is not to be confused with the expected increase (or decrease) in consumption and emissions due to wind blowing at a certain speed and direction for an individual trip.
Figure 7,
Figure 8,
Figure 9,
Figure 10,
Figure 11,
Figure 12,
Figure 13 and
Figure 14 provide more insight into the latter case.
Figure 7,
Figure 8,
Figure 9 and
Figure 10 plot the percentage change in all properties vis-à-vis wind speed, whereas
Figure 11,
Figure 12,
Figure 13 and
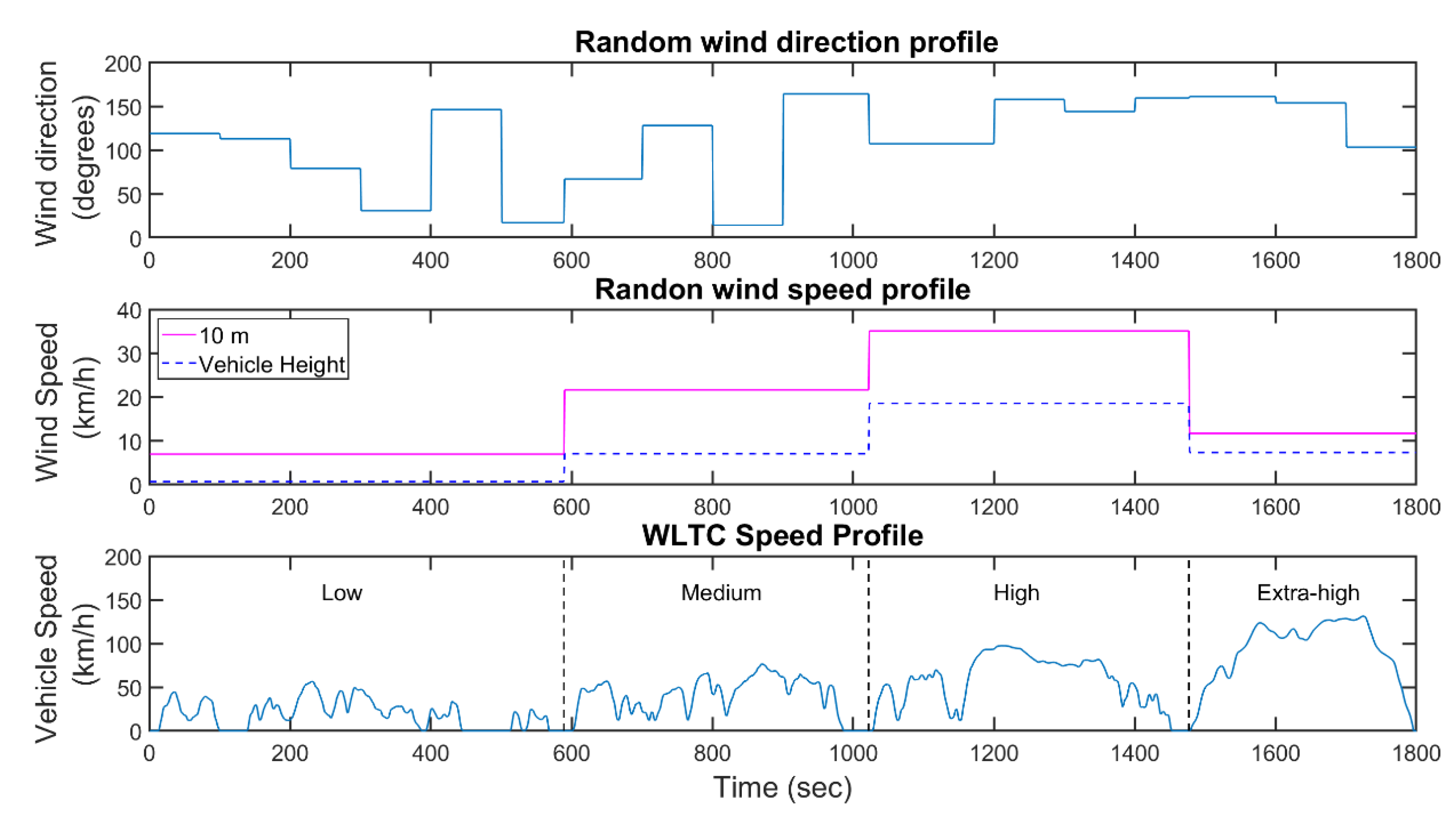
Figure 14 plot the same change, this time with respect to mean wind direction. The results showcased in the above plots were derived from site 2 and were broken down in the different phases of the WLTC, with the aim of providing more insight into the effect of ambient wind on different vehicle speeds (city center as opposed to highway, etc.).
It is reminded here that the generation of random wind profiles proceeds by picking a single value for wind speed for each cycle phase, whereas for wind direction, each phase is broken down into several segments. Therefore, wind speed in
Figure 7,
Figure 8,
Figure 9 and
Figure 10 is the wind speed blowing for the whole duration of each cycle phase, whereas wind direction in
Figure 11,
Figure 12,
Figure 13 and
Figure 14 refers to the mean wind direction for the same cycle phase. Idling and deceleration instances of the cycle were discarded in the calculation of mean wind direction, given that wind drag was not contributing to the engine load for the above cases. Moreover, in
Figure 7,
Figure 8,
Figure 9 and
Figure 10, “negative” winds correspond to a predominantly tailwind environment (i.e.,
), whereas “positive” winds reflect a predominantly headwind environment (
). Finally, it is noted that the wind speed referenced in
Figure 7,
Figure 8,
Figure 9 and
Figure 10 is the wind blowing at vehicle height and should not be confused with the wind speed at 10 m above ground, referenced in
Figure 4.
It is no surprise that the extra-high phase of the WLTC (
Figure 7 and
Figure 11) exhibited the biggest percentage increases for all properties. Not only were vehicle speeds higher, but the prevailing wind speeds were also higher, due to the different boundary layer characteristics (see Equation (9)). For a wind blowing at 30 km/h (approximately 50 km/h at 10 m reference height) the rise in fueling/CO
2 emissions reached 25%, whereas for the specific energy consumption, the equivalent rise was almost 40%. NO emissions for the same case rose up to 21%. Finally, soot, although the most insensitive property with respect to wind for the current engine, still showcased a considerable increase, almost 13%, for the same wind speed. A similar picture is drawn when looking at the high phase of the cycle (
Figure 8). For wind speeds above 20 km/h at vehicle height (approximately 40 km/h at 10 m above ground), the increase in fueling/CO
2 exceeded 10%, and the same applied to NO emissions.
Focusing on NO emissions, it is noted that higher vehicle speeds, when coupled with strong headwinds, led to increased engine load and therefore higher in-cylinder temperatures, thus favoring the formation of NO [
45,
56]. The relation between NO emissions and engine load is further illustrated in
Figure 15, where the increased NO emissions in the extra-high phase were attributed to the higher operating points, vis-à-vis the reference case, for engine speeds above 2000 rpm.
On the other hand, when it comes to soot emissions, it must be clarified that the stated increase happened in a backdrop of relatively low soot emissions for the extra-high phase of the cycle (see
Table 5). Therefore, transient events, although instantaneous, can have a relatively big impact on overall soot emissions [
57]. It is noted that soot emissions are mostly linked to accelerations from standstill [
43,
44], typical during city-center driving, where both vehicle and wind speeds (thus aerodynamic drag) are low.
As we moved to the first phases of the cycle, wind speeds, as well as vehicle speeds, were lower and thus the relevant change in all properties of interest was more modest. The maximum rise over the reference case for NO emissions in the low phase of the cycle (
Figure 10) was approximately 0.25%, whereas for the soot the maximum rise it was 0.1%. Parameters such as road slope, tire inflation pressure, or auxiliary usage were more prominent in terms of their effect on consumption and emissions for the specific vehicle speed range compared to aerodynamic drag [
15,
31].
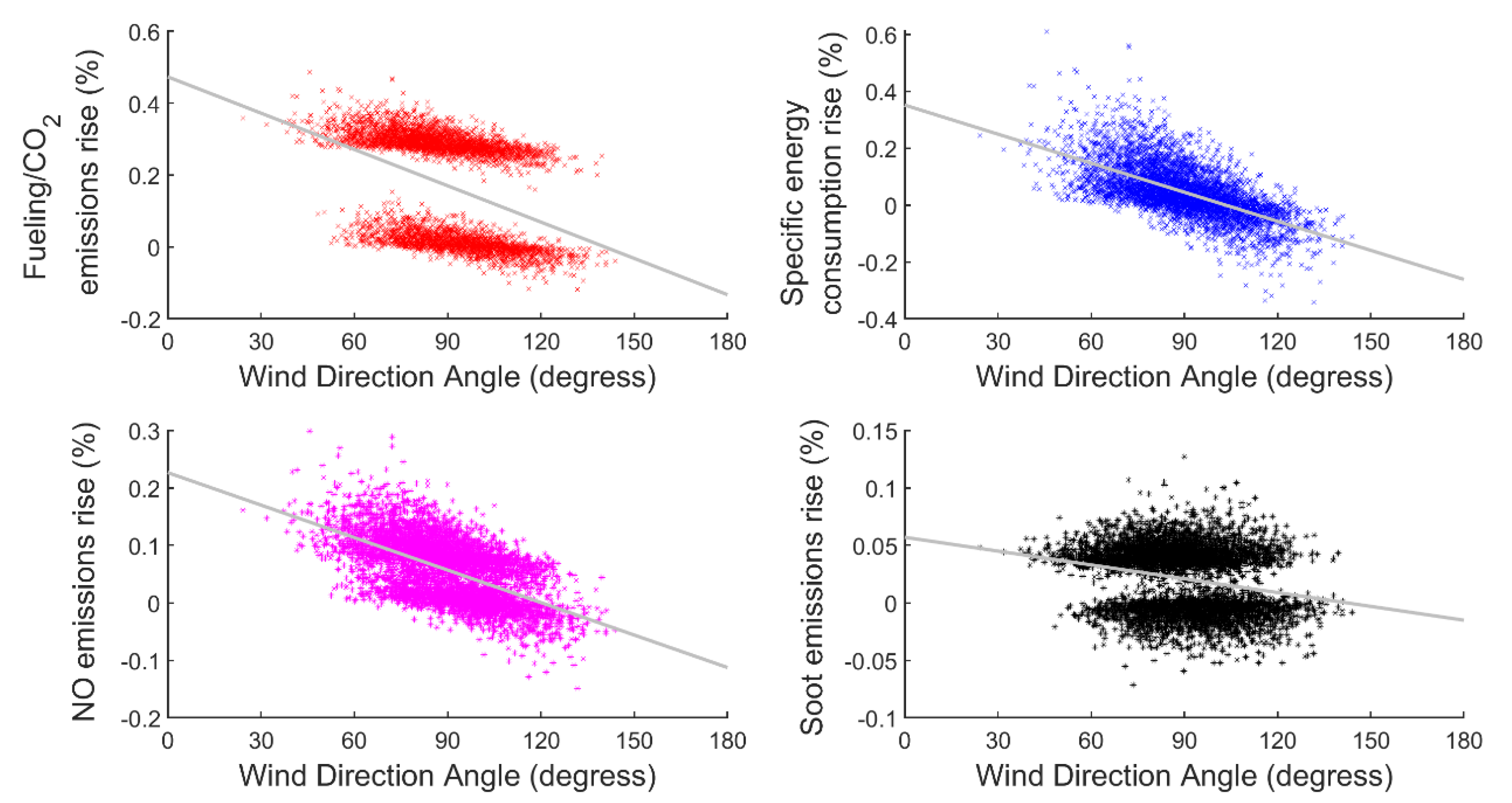
On the other hand,
Figure 11,
Figure 12,
Figure 13 and
Figure 14 showcase a generally declining trend for consumption and emissions vis-à-vis wind direction angle. As we gradually moved from a predominantly headwind environment to a predominantly tailwind environment, wind drag on the vehicle and thus engine load and associated fuel/energy consumption and emissions were lowered. However, the decrease in consumption and emissions as we moved towards tailwinds was not enough to offset the relevant increase due to headwinds. Considering the extra-high phase results (
Figure 11), where the effect of wind drag was more pronounced, we noted that the maximum increase was 28% for fueling/CO
2 emissions, 22% for NO emissions, 13% for soot, and 41% for specific energy consumption. The above numbers correspond to a mean wind direction angle equal to
. On the other hand, the minimum values for emissions were observed for a mean wind direction equal to
, manifesting an 18% drop in fueling/CO
2 emissions, 16% in NO, 4% in soot, and 25% in energy consumption.
The same pattern held true for the rest of the cycle phases (
Figure 12,
Figure 13 and
Figure 14), although for the low and medium phases it was far less pronounced due to vehicle and wind speeds being lower. However, in
Figure 12 (high phase) it is shown that there were multiple trips with mean wind direction below
, where fueling/CO
2 emissions or even NO emissions exhibited a noteworthy increase: above 8% for fueling and NO, and almost 4% for soot. On the contrary, the maximum drop in a tailwind environment was −7.3% for fuel consumption, −6.8% for NO emissions, and −2% for soot.
This fundamental “asymmetry” between the negative effect of headwinds and the positive effect of tailwinds lies behind the findings presented in
Figure 4. For a sufficiently large number of trips, the inadequacy of tailwinds to offset the effect of headwinds resulted in a net increase in fuel/energy consumption and emissions, thus highlighting the shortcomings of the current certification procedure, which ignores the effect of ambient wind.
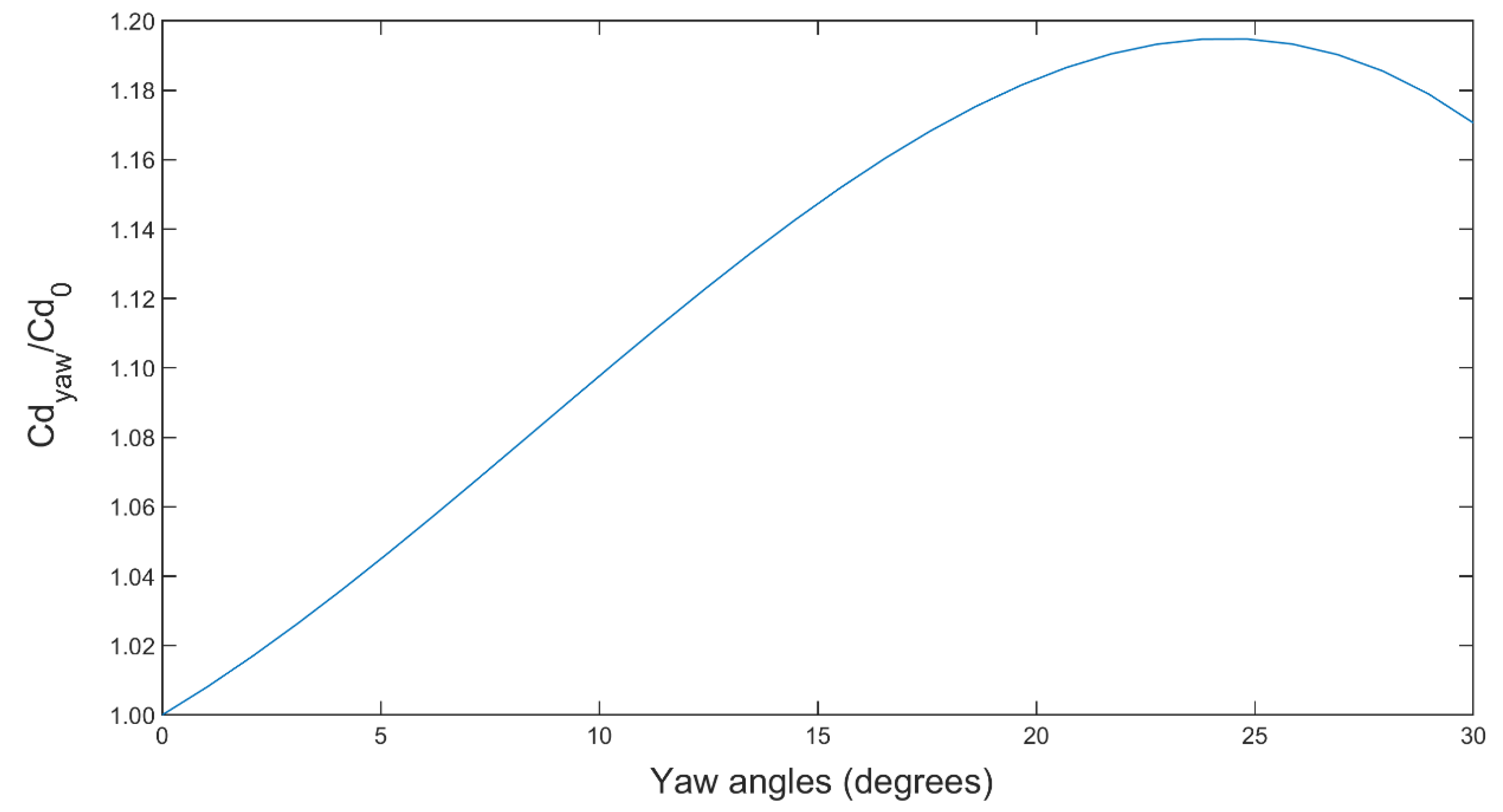
Finally, going back to
Figure 11, it is noted that the highest values for consumption and emissions increase did not appear at zero (or close to zero) wind angles, but rather at angles
. Going back to Equations (1) and (2) and
Figure 1 and
Figure 2, we noticed that for such wind angles
, the decrease in relative air speed V
R compared to the case where
(due to
was offset from the rise in yaw angle and the subsequent rise in the drag coefficient. This observation challenges the widely accepted notion that vehicle aerodynamics should be optimized for the zero-yaw condition.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}