
Improved Modeling of a Multi-Level Inverter for TACS to Reduce Computational Time and Improve Accuracy


Abstract
:1. Introduction
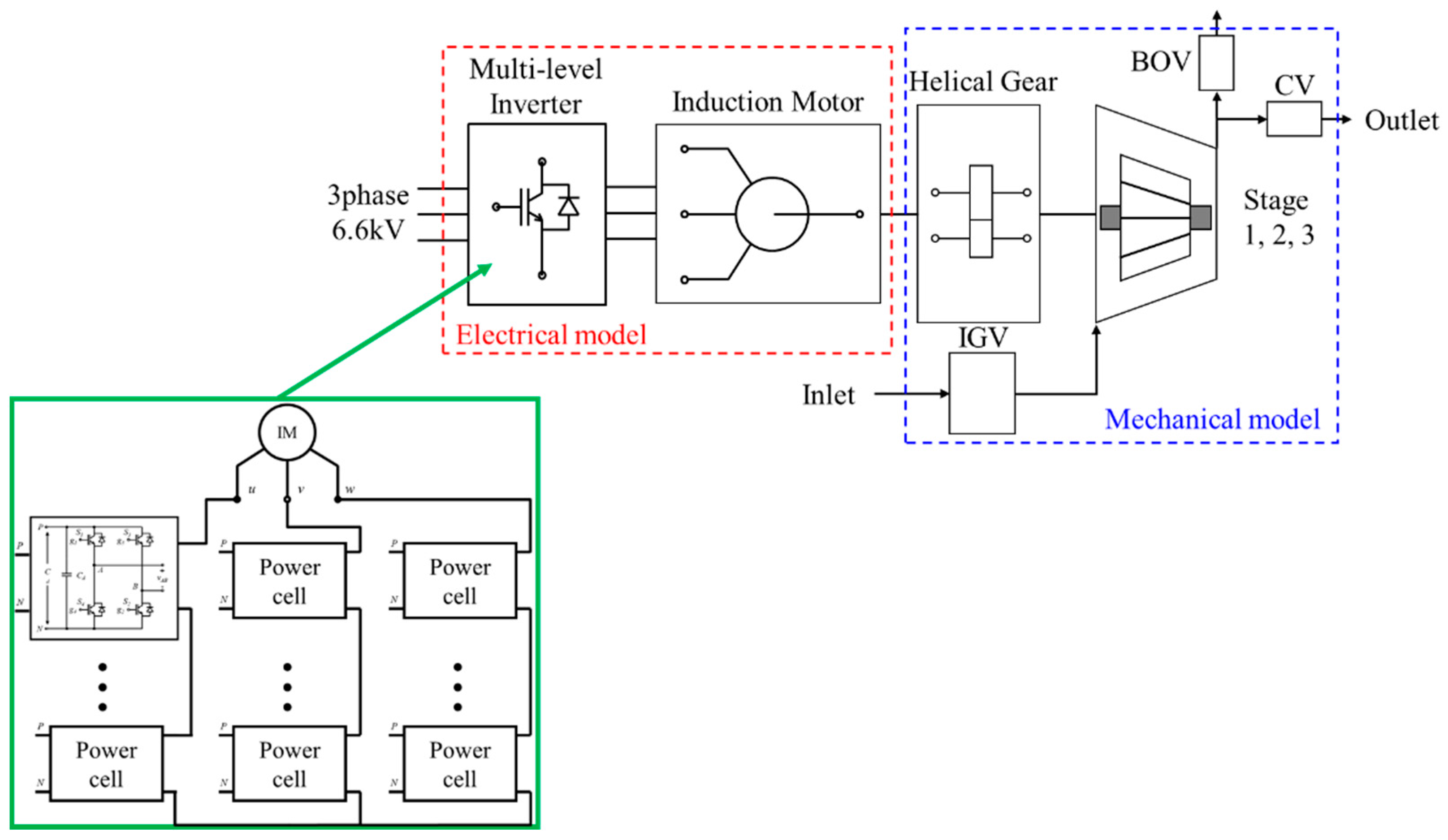
2. Configuration of TACS
3. Model of TACS
3.1. Mechanical Model
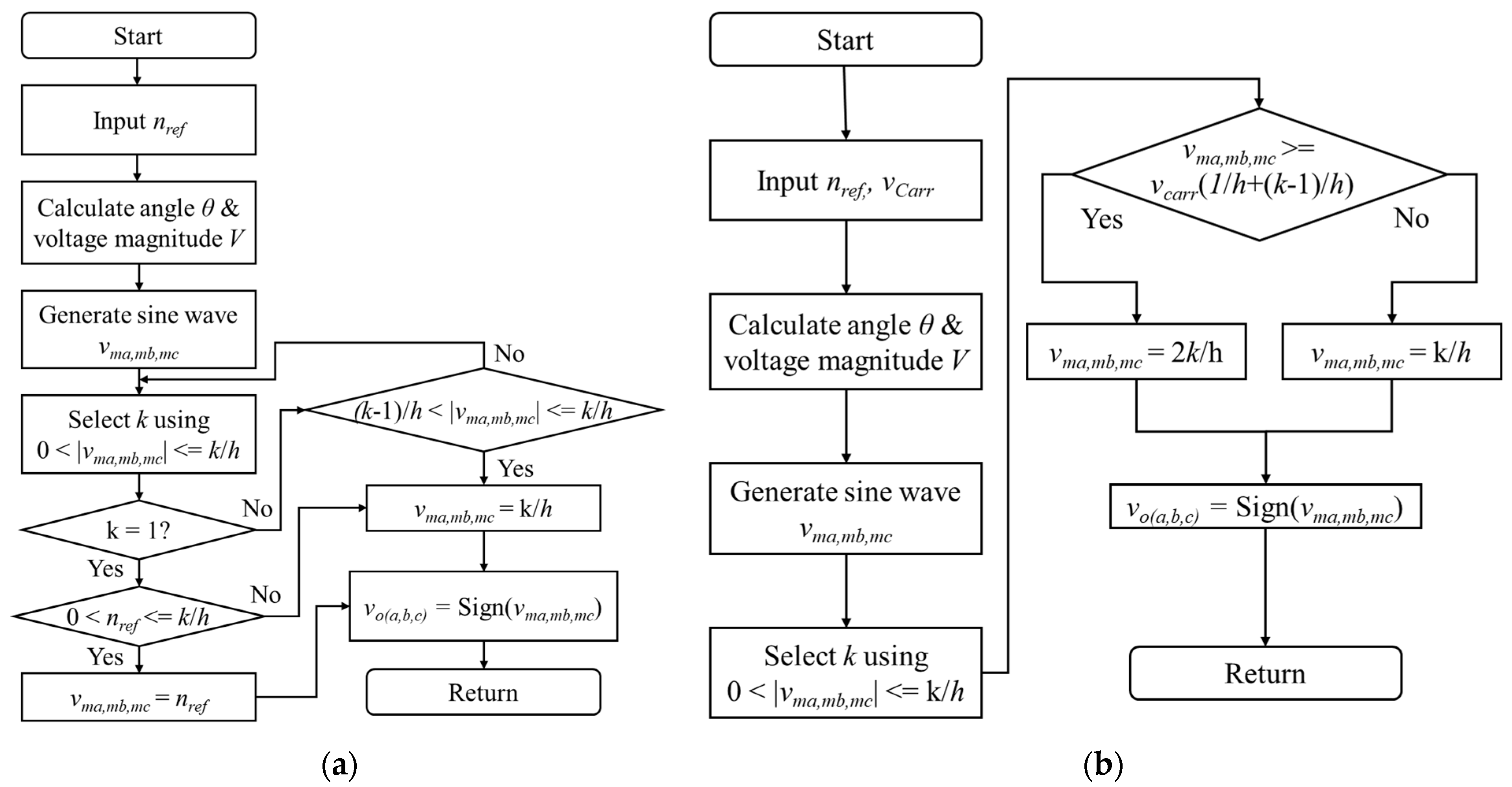
3.2. Electrical Model
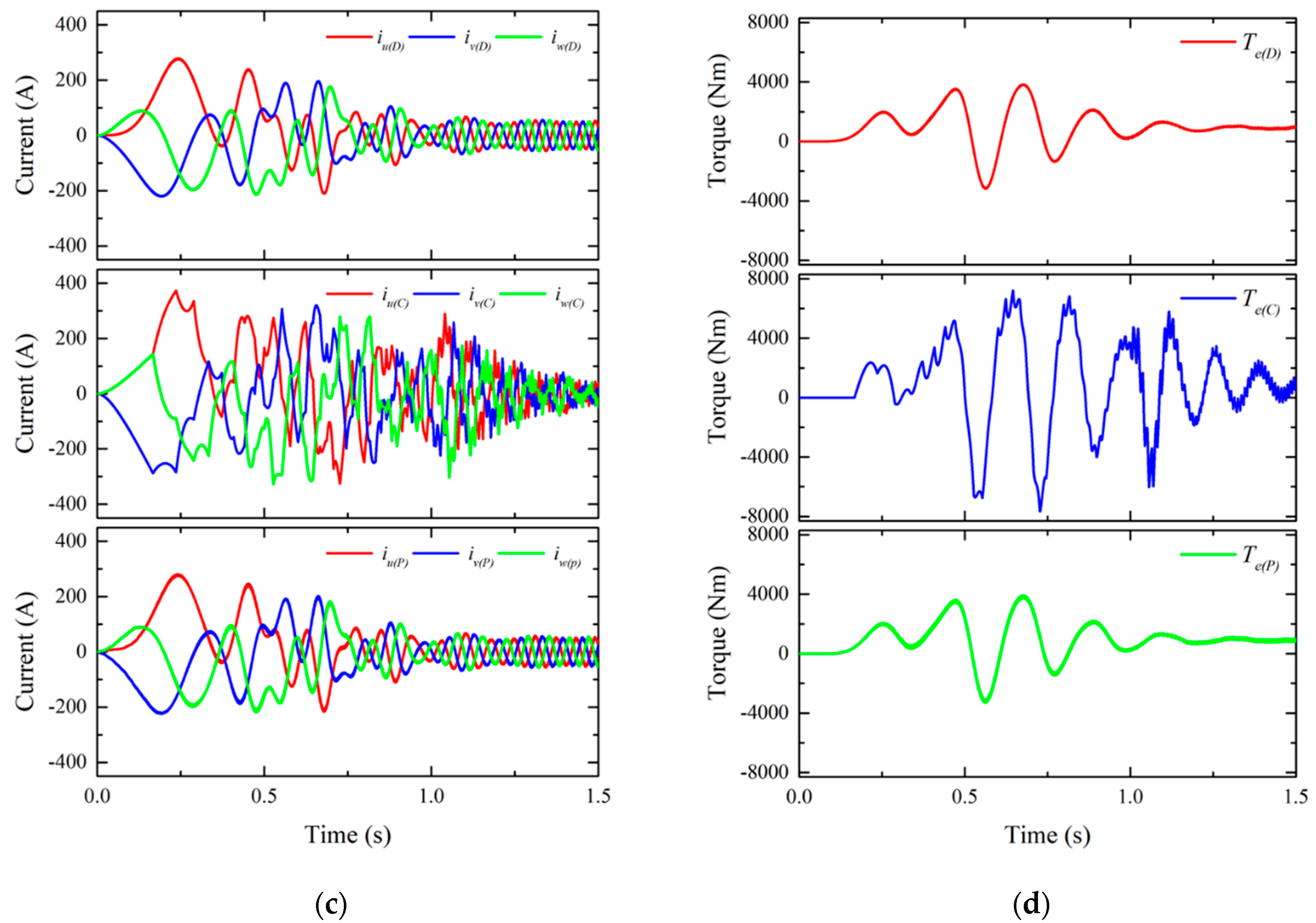
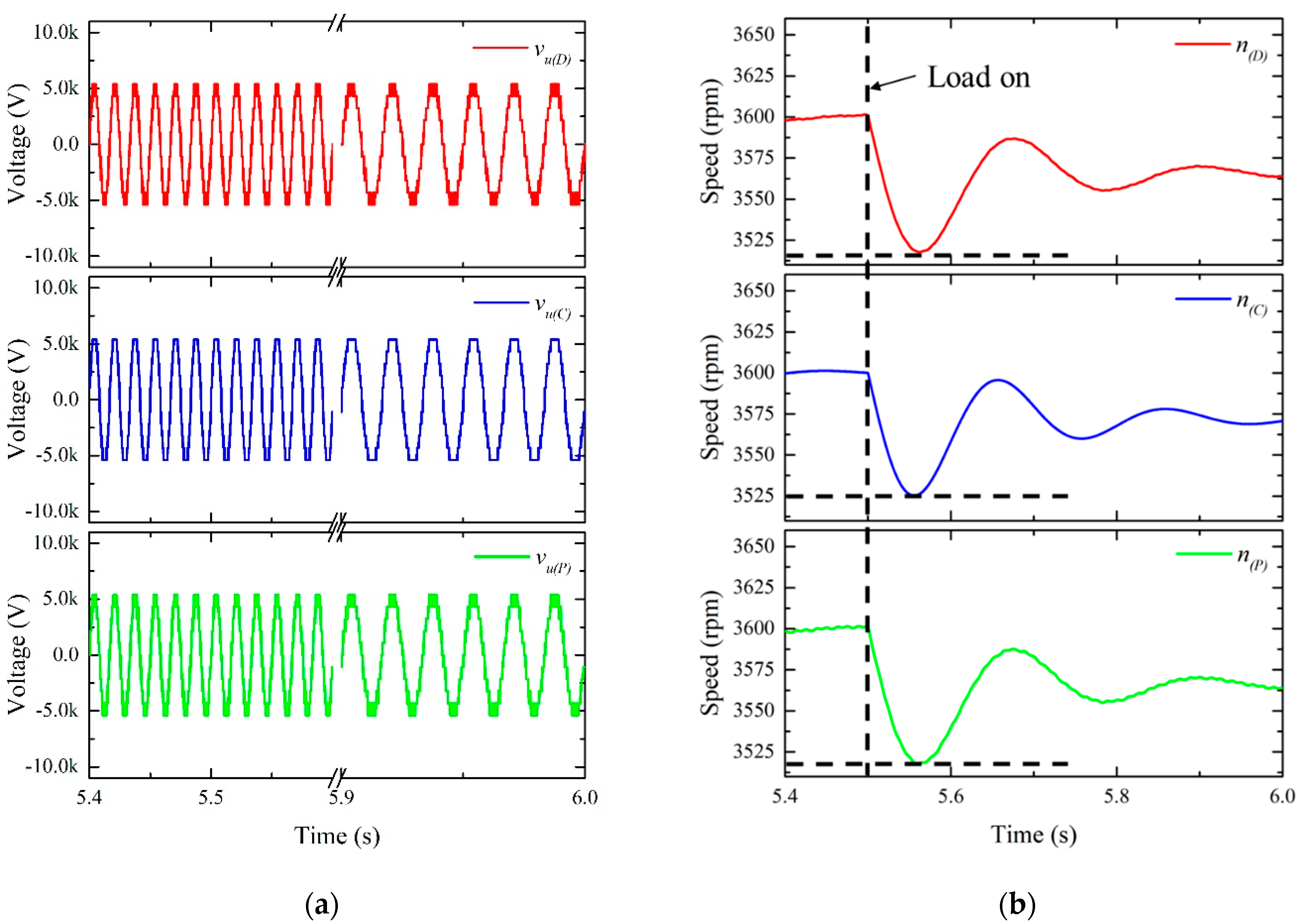
4. Verification
4.1. Simulation Results
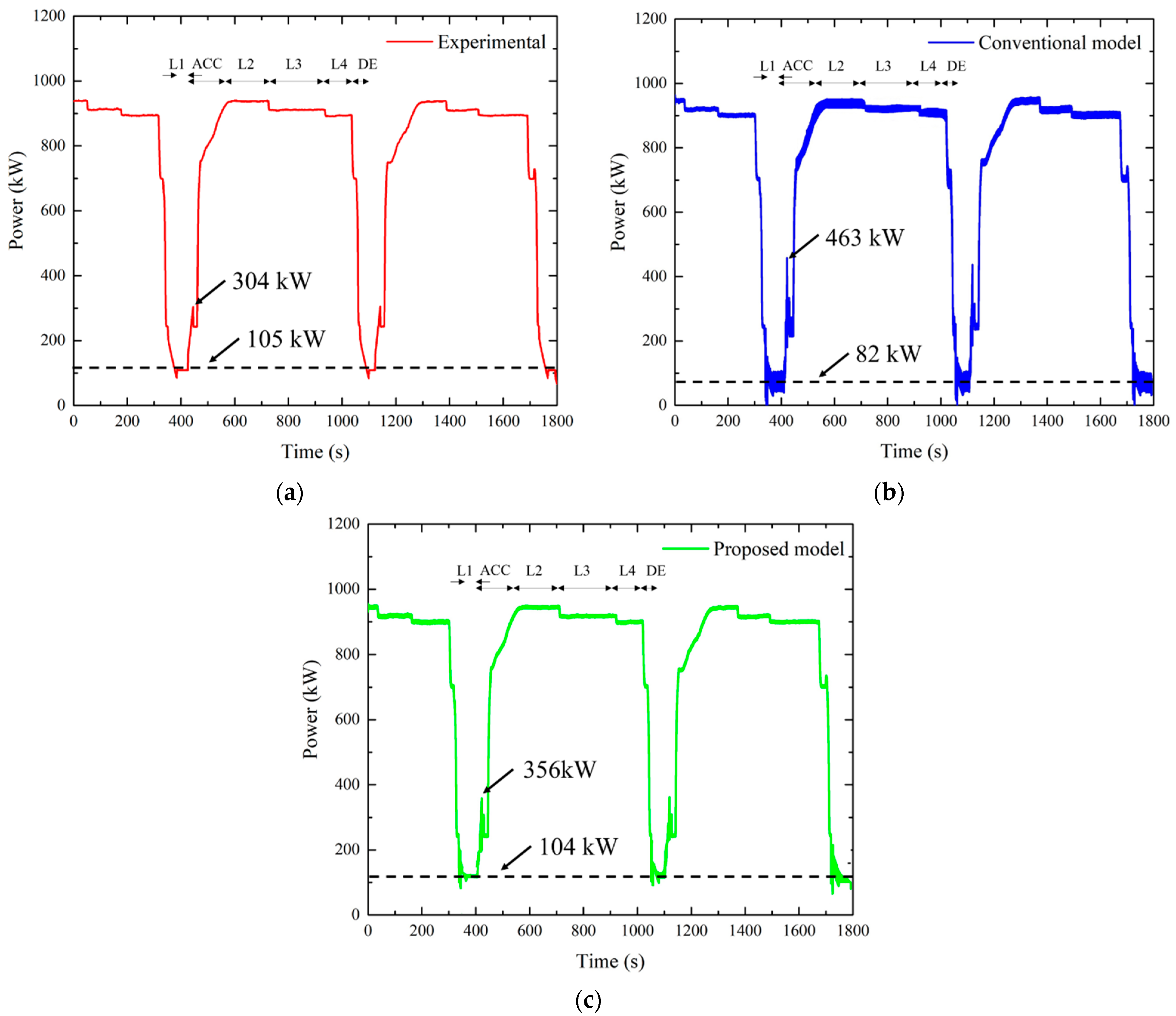
4.2. Experimental Results
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hammond, P.W. A new approach to enhance power quality for medium voltage AC drives. IEEE Trans. Ind. Appl. 1997, 33, 202–208. [Google Scholar] [CrossRef]
- Meynard, T.A.; Foch, H. Multi-level conversion: High voltage choppers and voltage-source inverters. In Proceedings of the PESC’92 Record, 23rd Annual IEEE Power Electronics Specialists Conference, Toledo, Spain, 29 June–3 July 1992; pp. 397–403. [Google Scholar] [CrossRef]
- Lai, J.S.; Peng, F.Z. Multilevel converters-a new breed of power converters. IEEE Trans. Ind. Appl. 1996, 32, 509–517. [Google Scholar] [CrossRef]
- Kim, S.A.; Hong, K.P.; Lee, S.K.; Kang, G.H. Analysis of output characteristics of 6.6KV multi-level inverter according to cable specification. J. KNST 2019, 2, 55–60. [Google Scholar] [CrossRef]
- Steinke, J.K. Use of an LC filter to achieve a motor-friendly performance of the PWM voltage source inverter. IEEE Trans. Energy Convers. 1999, 14, 649–654. [Google Scholar] [CrossRef]
- Khoucha, F.; Lagoun, S.M.; Marouani, K.; Kheloui, A.; Benbouzid, M.E.H. Hybrid cascaded H-bridge multilevel-inverter induction-motor-drive direct torque control for automotive applications. IEEE Trans. Ind. Electron. 2009, 57, 892–899. [Google Scholar] [CrossRef] [Green Version]
- Nallamekala, K.K.; Sivakumar, K. A fault-tolerant dual three-level inverter configuration for multipole induction motor drive with reduced torque ripple. IEEE Trans. Ind. Electron. 2015, 63, 1450–1457. [Google Scholar] [CrossRef]
- Rodriguez, J.; Lai, J.S.; Peng, F.Z. Multilevel inverters: A survey of topologies, controls, and applications. IEEE Trans. Ind. Electron. 2002, 49, 724–738. [Google Scholar] [CrossRef] [Green Version]
- Bentaleb, T.; Cacitti, A.; De Franciscis, S.; Garulli, A. Multivariable control for regulating high pressure centrifugal compressor with variable speed and IGV. In Proceedings of the 2014 IEEE Conference on Control Applications, Juan Les Antibes, France, 8–10 October 2014; pp. 486–491. [Google Scholar] [CrossRef]
- Saidur, R.; Mekhilef, S.; Ali, M.B.; Safari, A.; Mohammed, H.A. Applications of variable speed drive (VSD) in electrical motors energy savings. Renew. Sustain. Energy Rev. 2012, 16, 543–550. [Google Scholar] [CrossRef]
- Jung, M.; Han, J.; Yu, S. Dynamic model of centrifugal compressor for prediction of surge evolution and performance variations. Trans. Korean Soc. Mech. Eng. B 2016, 40, 297–304. [Google Scholar] [CrossRef]
- Kim, S.A.; Hong, K.P. Development of average model to analysis dynamic characteristics of variable speed driven turbo air compressor system with multi level inverter. Trans. Korean Inst. Electr. Eng. 2020, 69, 1200–1207. [Google Scholar] [CrossRef]
- Ku, H.K.; Kwak, K.K.; Kim, J.M. A study integrated-power-system simulation model of all-electric-ship. Trans. Korean Inst. Power Electron. 2015, 20, 45–50. [Google Scholar] [CrossRef] [Green Version]
- Krause, P.C.; Wasynczuk, O.; Sudhoff, S.D.; Pekarek, S. Analysis of Electric Machinery and Drive Systems; IEEE Press: New York, NY, USA, 2002; p. 2. [Google Scholar] [CrossRef]
- Prasad, K.N.V.; Kumar, G.R.; Kiran, T.V.; Narayana, G.S. Comparison of different topologies of cascaded H-Bridge multilevel inverter. In Proceedings of the 2013 International Conference on Computer Communication and Informatics, Coimbatore, India, 4–6 January 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Rao, S.N.; Kumar, D.A.; Babu, C.S. Implementation of cascaded based reversing voltage multilevel inverter using multi carrier modulation strategies. Int. J. Power Electron. Dri. Syst. 2018, 9, 220–230. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value | Item | Value |
|---|---|---|---|
| Number of stage | 3 | Rated pressure | 8 bar |
| Rated flow rate | 10,000 m3/h | Shaft speed | 3600 rpm |
| Shaft power | 848.9 kW | Motor type | Induction motor |
| Rated power of motor | 1050 kW | Rated power of inverter | 1500 KVA |
| Operating speed range with VSD | 70~100% | Operating speed range with VSD and IGV | 40~100% |
| Item | Value | Item | Value | ||
|---|---|---|---|---|---|
| Inverter | Input voltage | 6.6 KV | Motor | Rated voltage | 6.6 KV |
| Topology | 11 level | No. of poles | 2 | ||
| Switching frequency | 10 kHz | Rated speed | 3600 rpm | ||
| Control method | V/F |
| Point | Detailed | Conventional | Proposed |
|---|---|---|---|
| 1 | 274 A | 371 A | 277 A |
| 2 | 205 A | 167 A | 203 A |
| 3 | 193 A | 218 A | 250 A |
| 4 | 207 A | 171 A | 205 A |
| Item | Detailed | Conventional | Proposed |
|---|---|---|---|
| Computational time | 73 s | 7 s | 7 s |
| Item | Experimental | Conventional | Proposed |
|---|---|---|---|
| Kilowatt hour | 767.7 kWh | 751.3 kWh | 764.5 kWh |
| Computational time | 30 min | 14 min | 14 min |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.-A. Improved Modeling of a Multi-Level Inverter for TACS to Reduce Computational Time and Improve Accuracy. Energies 2021, 14, 849. https://doi.org/10.3390/en14040849
Kim S-A. Improved Modeling of a Multi-Level Inverter for TACS to Reduce Computational Time and Improve Accuracy. Energies. 2021; 14(4):849. https://doi.org/10.3390/en14040849
Chicago/Turabian StyleKim, Sung-An. 2021. "Improved Modeling of a Multi-Level Inverter for TACS to Reduce Computational Time and Improve Accuracy" Energies 14, no. 4: 849. https://doi.org/10.3390/en14040849
APA StyleKim, S. -A. (2021). Improved Modeling of a Multi-Level Inverter for TACS to Reduce Computational Time and Improve Accuracy. Energies, 14(4), 849. https://doi.org/10.3390/en14040849