
Experimental Study of the Direct Drive Hydraulic System with the Torque Mode


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
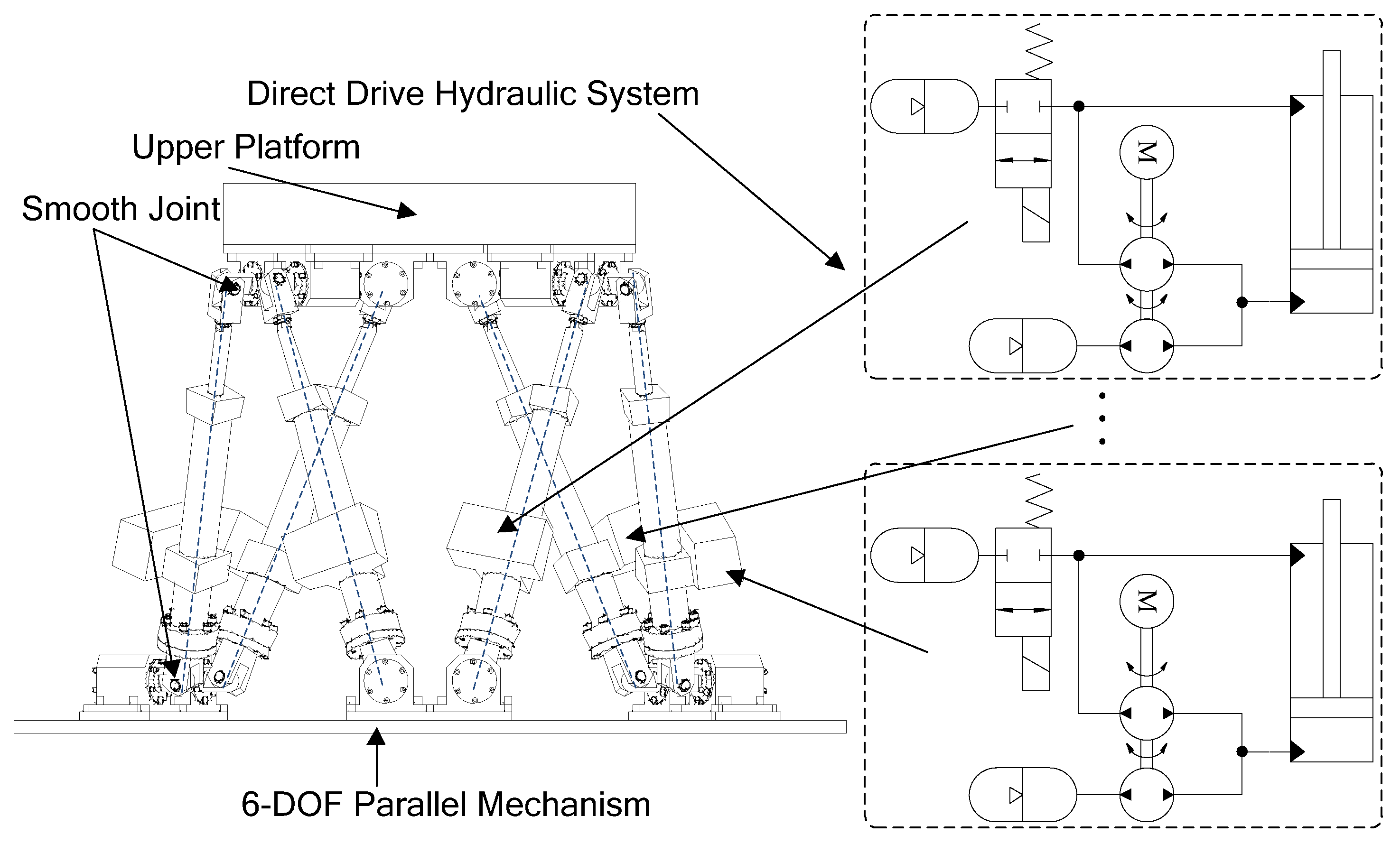
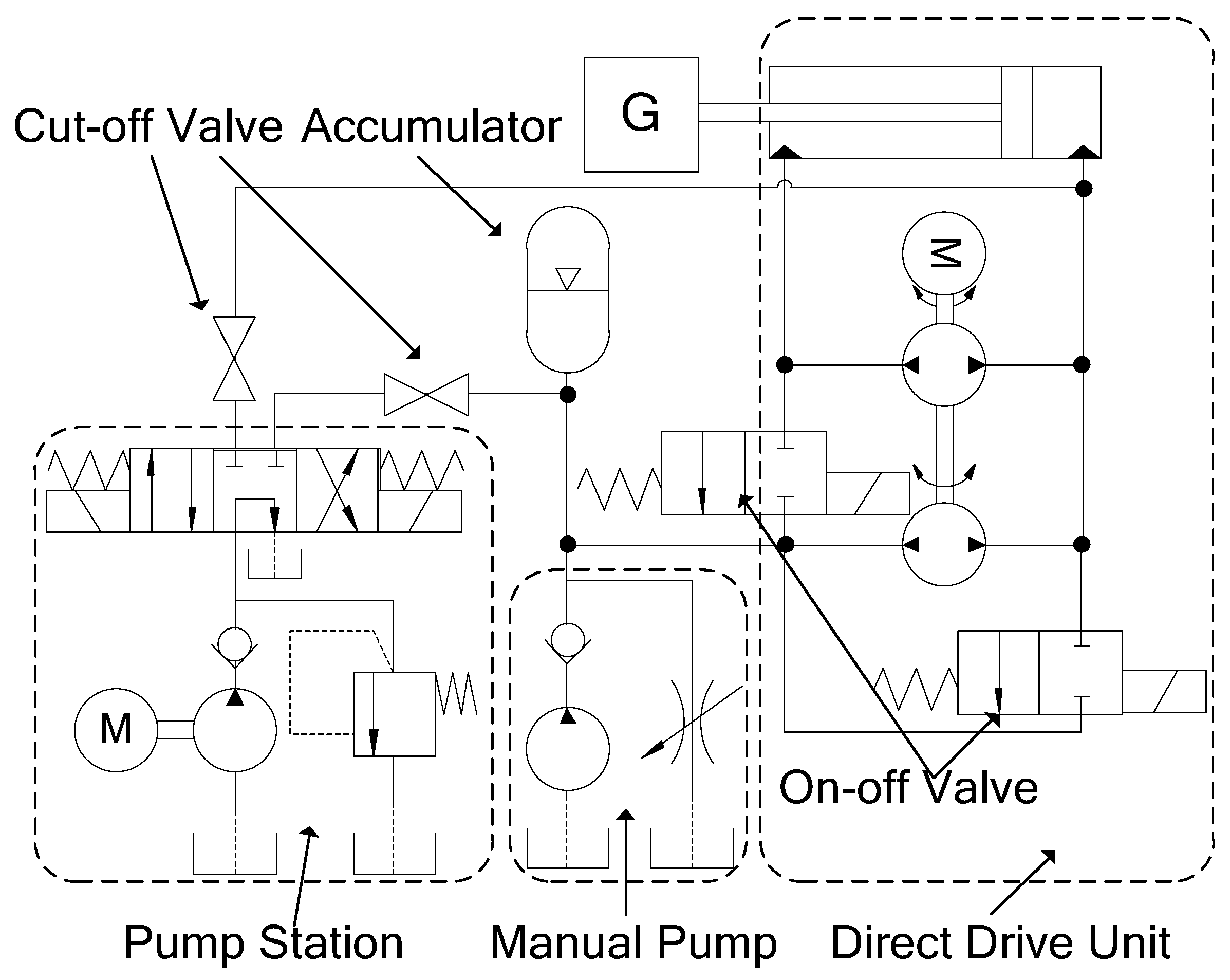
2. Introduction to the Direct Drive Hydraulic System
3. Transfer Function of the Direct Drive Hydraulic System
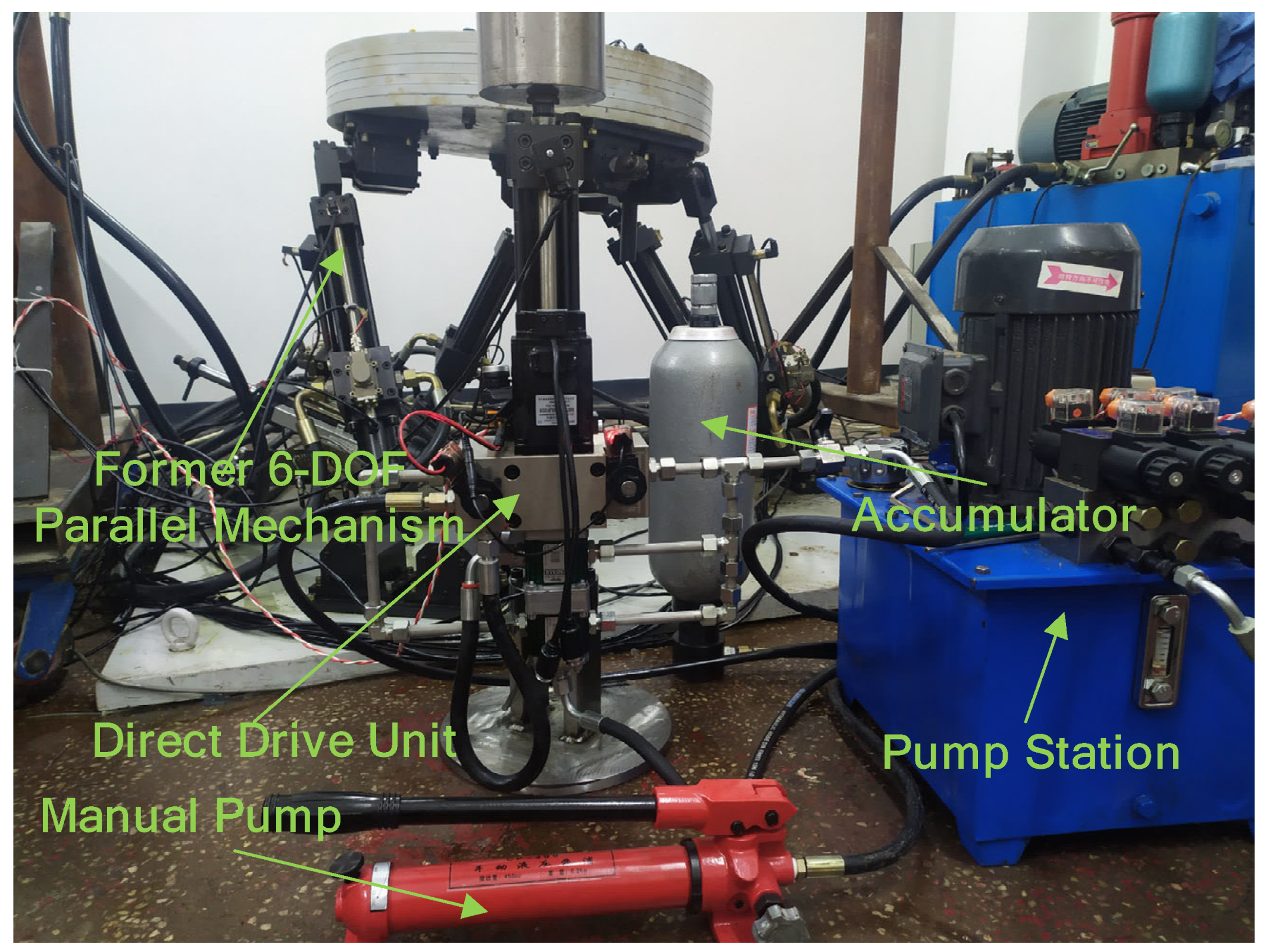
4. Introduction to the Experimental System
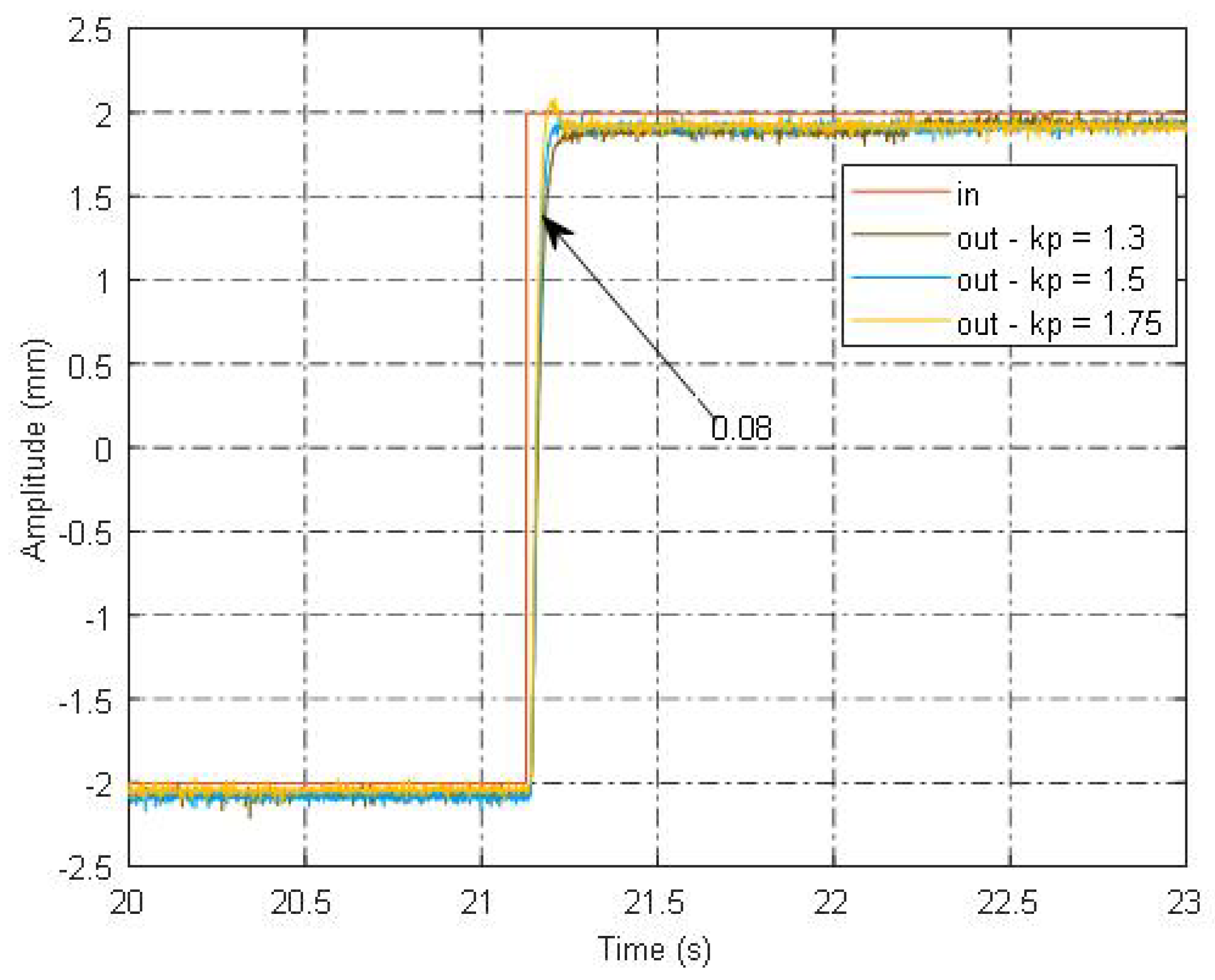
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Nomenclature
| and | pressures of the two cavities of the cylinder (Pa) |
| and | piston areas of the two cavities of the cylinder (m2) |
| gravity load (N) | |
| motor torque coefficient (N × m/A) | |
| current of the q axis (A) | |
| moment of inertia of the motor-pump unit (kg × m2) | |
| viscous damping coefficient of the motor-pump unit (N × m × s/rad) | |
| sum displacement of the coaxial gear pump (m3) | |
| and | displacements of the two pump units (m3) |
| load pressure (Pa) | |
| volume efficiency | |
| speed of the motor-pump unit (rpm) | |
| leakage coefficient (m3/Pa) | |
| damping coefficient of the cylinder (N × s/m) | |
| load mass (kg) |
References
- Ehyaei, M.A.; Ahmadi, A.; Rosen, M.A.; Davarpanah, A. Thermodynamic Optimization of a Geothermal Power Plant with a Genetic Algorithm in Two Stages. Processes 2020, 8, 1277. [Google Scholar] [CrossRef]
- Davarpanah, A.; Zareib, M.; Valizadeh, K.; Mirshekaria, B. CFD design and simulation of ethylene dichloride (EDC) thermal cracking reactor. Energy Sources Part A Recovery Util. Environ. Eff. 2019, 41, 1573–1587. [Google Scholar] [CrossRef]
- Yousefifard, M.; Salehi, G.R.; Davarpanah, A. Comparison of Exergy and Advanced Exergy Analysis in Three Different Organic Rankine Cycles. Processes 2020, 8, 586. [Google Scholar]
- Chen, Y.L.; Yan, D.; Zhang, Z.M.; Ning, D.Y.; Gong, Y.J. Static and dynamic characteristics of soft unit based on hydraulic straight drive. J. ZheJiang Univ. (Eng. Sci.) 2019, 53, 1602–1609. [Google Scholar]
- Xu, H.; Du, Z.J.; Shen, J.L.; Wang, L. Characteristics of Power Mechanism for Ultra-high-pressure Hydraulic System with Direct Electric Drive. Zhongguo Jixie Gongcheng 2017, 28, 162–166. [Google Scholar]
- Sell, N.P.; Plummer, A.R.; Hillis, A.J.; Chandel, D. Modelling and calibration of a direct drive hydraulic. In Proceedings of the 12th European Wave and Tidal Energy Conference, Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Luo, C.Y.; Yao, J.Y.; Yu, Y.P.; Liu, H.; Xu, Q. Nonlinear Modeling and Analysis of a Dual-stage Direct Drive Actuator. Jixie Gongchen Xuebao 2018, 54, 312–319. [Google Scholar] [CrossRef]
- Wang, X.; Tao, J.F.; Zhang, F.R.; Wu, Y.J.; Liu, C.L. Precision position control of pump-controlled asymmtric cylinder. Zhejiang Daxue Xuebao Gongxueban 2016, 50, 597–602. [Google Scholar]
- Shen, W.; Mai, Y.F.; Su, X.Y.; Zhao, J.B.; Jiang, J.H. A new electric hydraulic actuator adopted the variable displacement pump. Asian J. Control 2016, 18, 178–191. [Google Scholar] [CrossRef]
- Schmidt, L.; Groenkjaer, M.; Pedersen, C.H.; Andersen, O.T. Position Control of an Over-Actuated Direct Hydraulic Cylinder Drive. Control Eng. Pract. 2017, 64, 1–14. [Google Scholar] [CrossRef]
- Minav, T.; Pietola, M.; Filatov, D.M.; Devyatkin, V.A.; Heikkinen, J. Fuzzy control of direct-driven hydraulic drive without conventional oil tank. In Proceedings of the XX IEEE International Conference on Soft Computing and Measurements (SCM), St. Petersburg, Russia, 24–26 May 2017; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2017; pp. 444–447. [Google Scholar]
- Helian, B.; Chen, Z.; Yao, B. Precision Motion Control of a Servomotor-Pump Direct-Drive Electrohydraulic System With a Nonlinear Pump Flow Mapping. IEEE Trans. Ind. Electron. 2019, 67, 8638–8648. [Google Scholar] [CrossRef]
- Ko, T.; Kaminaga, H.; Nakamura, Y. Key design parameters of a few types of electro-hydrostatic actuators for humanoid robots. Adv. Robot. 2018, 32, 1241–1252. [Google Scholar] [CrossRef]
- Ko, T.; Kaminaga, H.; Nakamura, Y. Current-pressure-position triple-loop feedback control of electro-hydrostatic actuators for humanoid robots. Adv. Robot. 2018, 32, 1269–1284. [Google Scholar] [CrossRef]
- Rehman, W.U.; Wang, X.; Wang, S.; Azhar, I. Motion synchronization of HA/EHA system for a large civil aircraft by using adaptive control. In Proceedings of the 2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), Nanjing, China, 12–14 August 2016; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2016; pp. 1486–1491. [Google Scholar]
- Rehman, W.U.; Wang, S.; Wang, X.; Shi, C.; Zhang, C.; Tomovic, M. Adaptive control for motion synchronization of HA/EHA system by using modified MIT rule. In Proceedings of the 2016 IEEE 11th Conference on Industrial Electronics and Applications (ICIEA), Hefei, China, 5–7 June 2016; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2016. [Google Scholar]
- Zad, H.S.; Ulasyar, A.; Zohaib, A. Robust Model Predictive position Control of direct drive electro-hydraulic servo system. In Proceedings of the 2016 International Conference on Intelligent Systems Engineering (ICISE), Islamabad, Pakistan, 15–17 January 2016; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2016. [Google Scholar]
- Kou, R.F.; Xu, J.N.; Liu, D.P.; Zhang, K.; Sun, K. Study on dual sliding mode control of EHA active suspensions. Zhongguo Jixie Gongcheng 2019, 30, 42–48, 53. [Google Scholar]
- Jiang, J.H.; Ge, Z.H.; Yang, C.; Liang, H.J. Differentiator-based discrete variable structure controller for direct drive electro-hydraulic servo system. Jilin Daxue Xuebao Gongxueban 2018, 48, 1492–1499. [Google Scholar]
- Li, Z.; Shang, Y.; Jiao, Z.; Lin, Y.; Wu, S.; Li, X. Analysis of the dynamic performance of an electro-hydrostatic actuator and improvement methods. Chin. J. Aeronaut. 2018, 31, 2312–2320. [Google Scholar] [CrossRef]
- Zhang, C. PD Plus Dynamic Pressure Feedback Control for a Direct Drive Stewart Manipulator. Energies 2020, 13, 1125. [Google Scholar] [CrossRef] [Green Version]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, C.; Jiang, H. Experimental Study of the Direct Drive Hydraulic System with the Torque Mode. Energies 2021, 14, 941. https://doi.org/10.3390/en14040941
Zhang C, Jiang H. Experimental Study of the Direct Drive Hydraulic System with the Torque Mode. Energies. 2021; 14(4):941. https://doi.org/10.3390/en14040941
Chicago/Turabian StyleZhang, Chenyang, and Hongzhou Jiang. 2021. "Experimental Study of the Direct Drive Hydraulic System with the Torque Mode" Energies 14, no. 4: 941. https://doi.org/10.3390/en14040941
APA StyleZhang, C., & Jiang, H. (2021). Experimental Study of the Direct Drive Hydraulic System with the Torque Mode. Energies, 14(4), 941. https://doi.org/10.3390/en14040941