
Design and Implement of Three-Phase Permanent-Magnet Synchronous Wave Generator using Taguchi Approach


Abstract
:1. Introduction
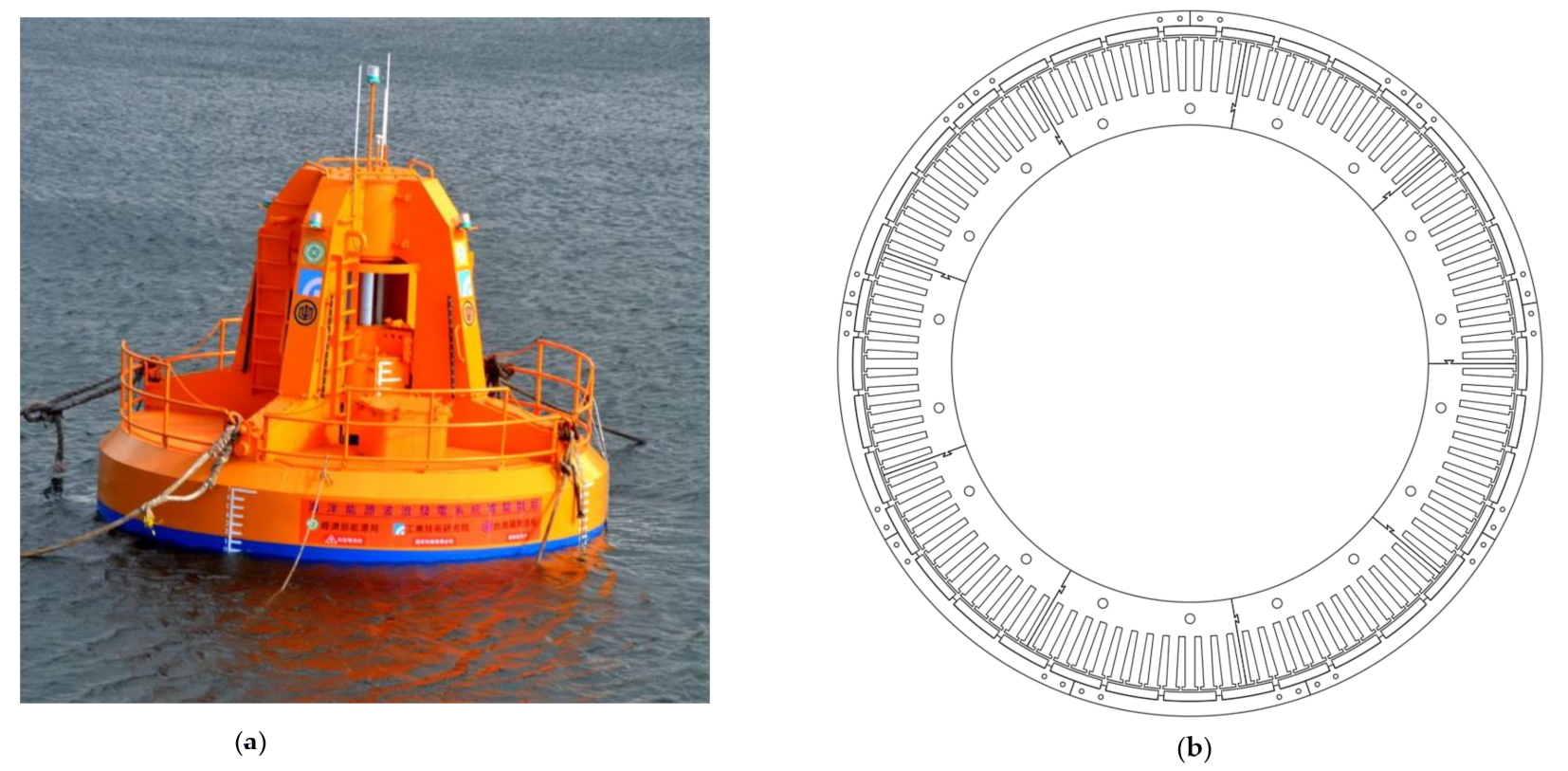
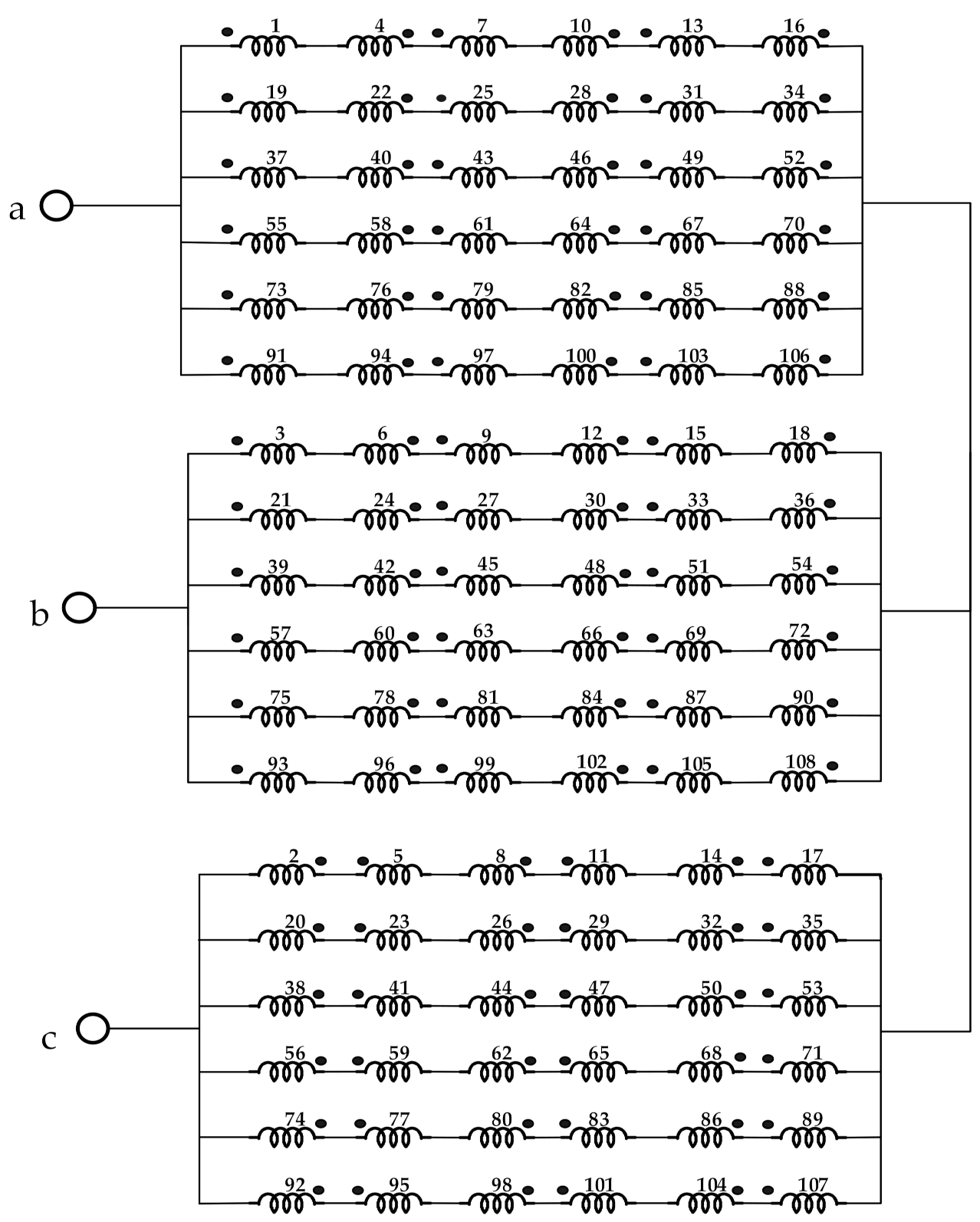
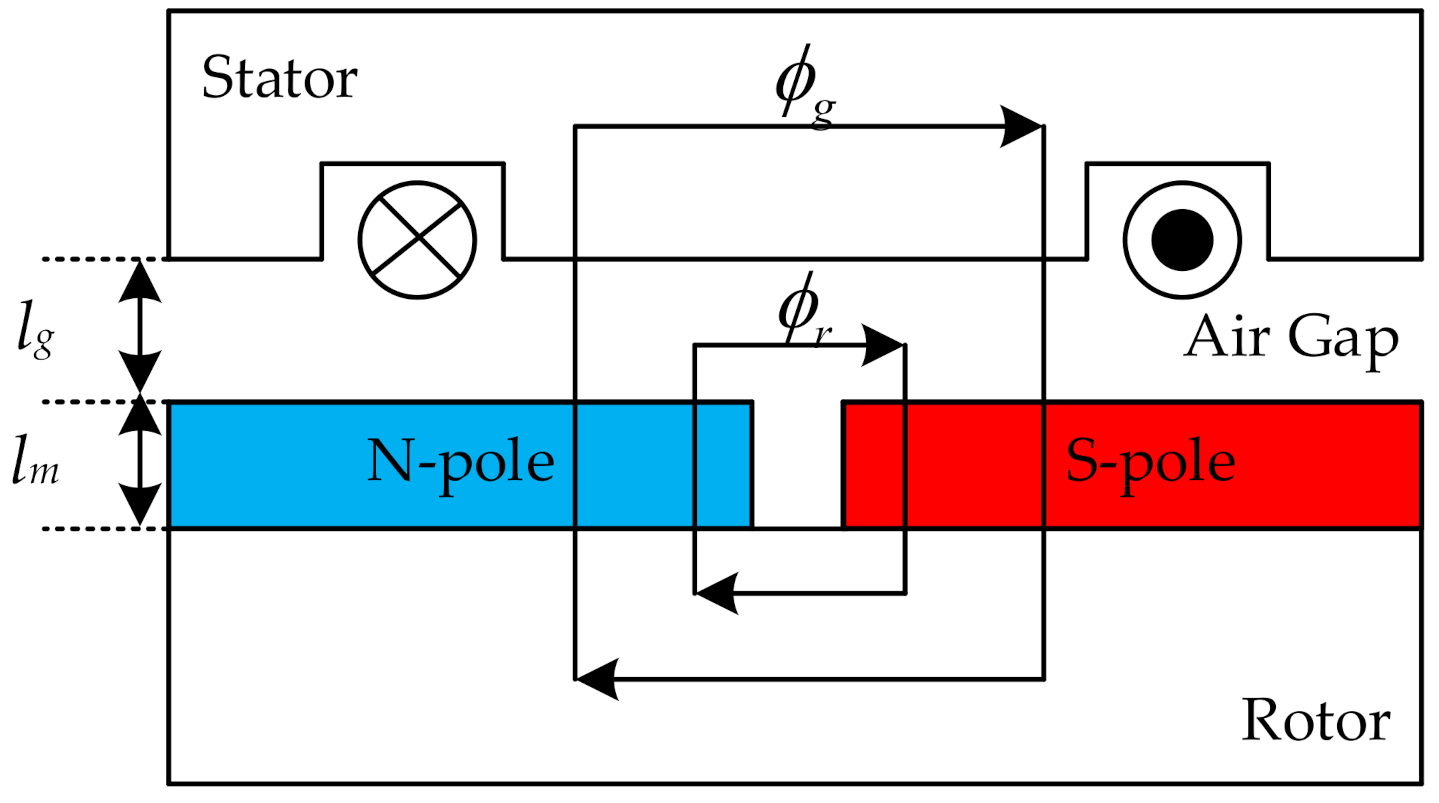
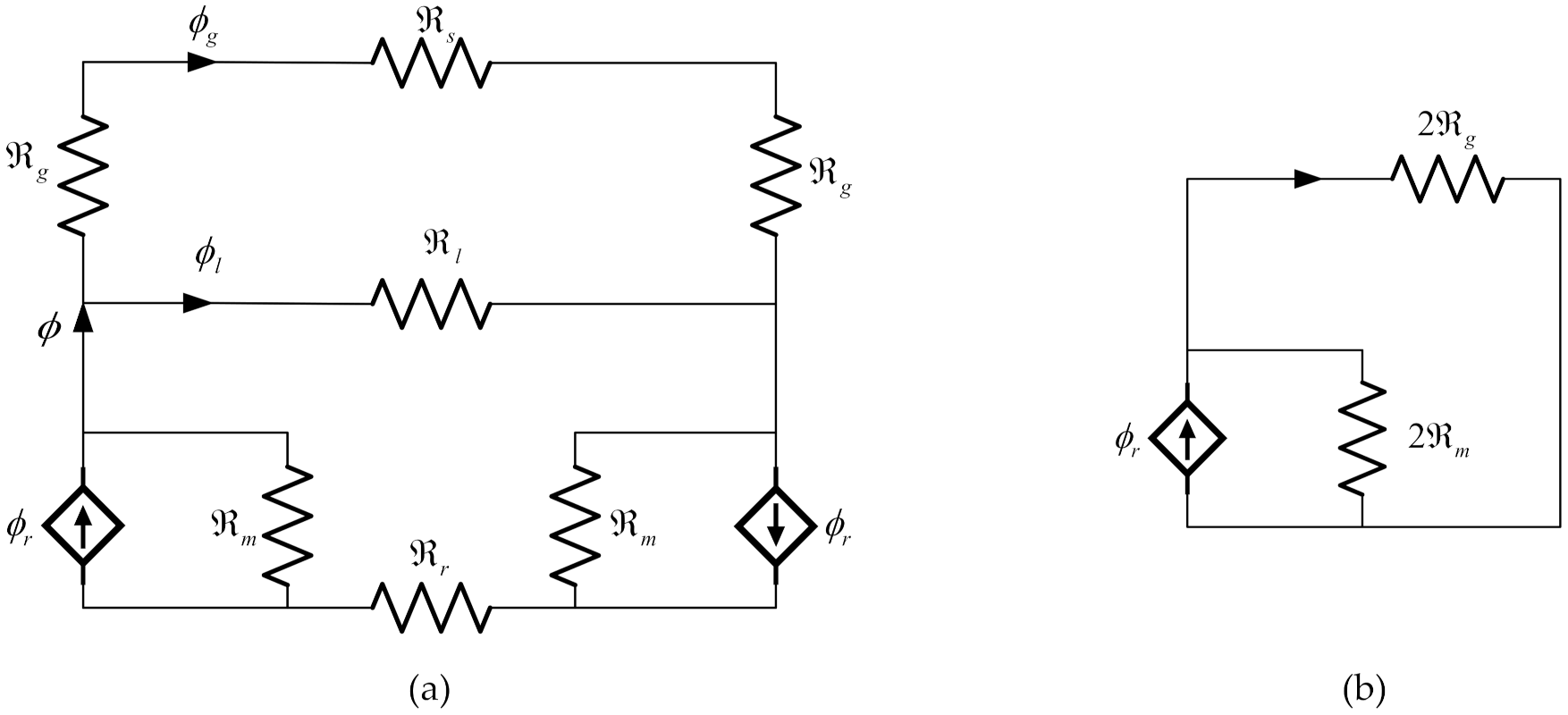
2. Structure and Characteristics
3. Optimal Analysis Using Taguchi Method
4. Performance Analysis and Discussion
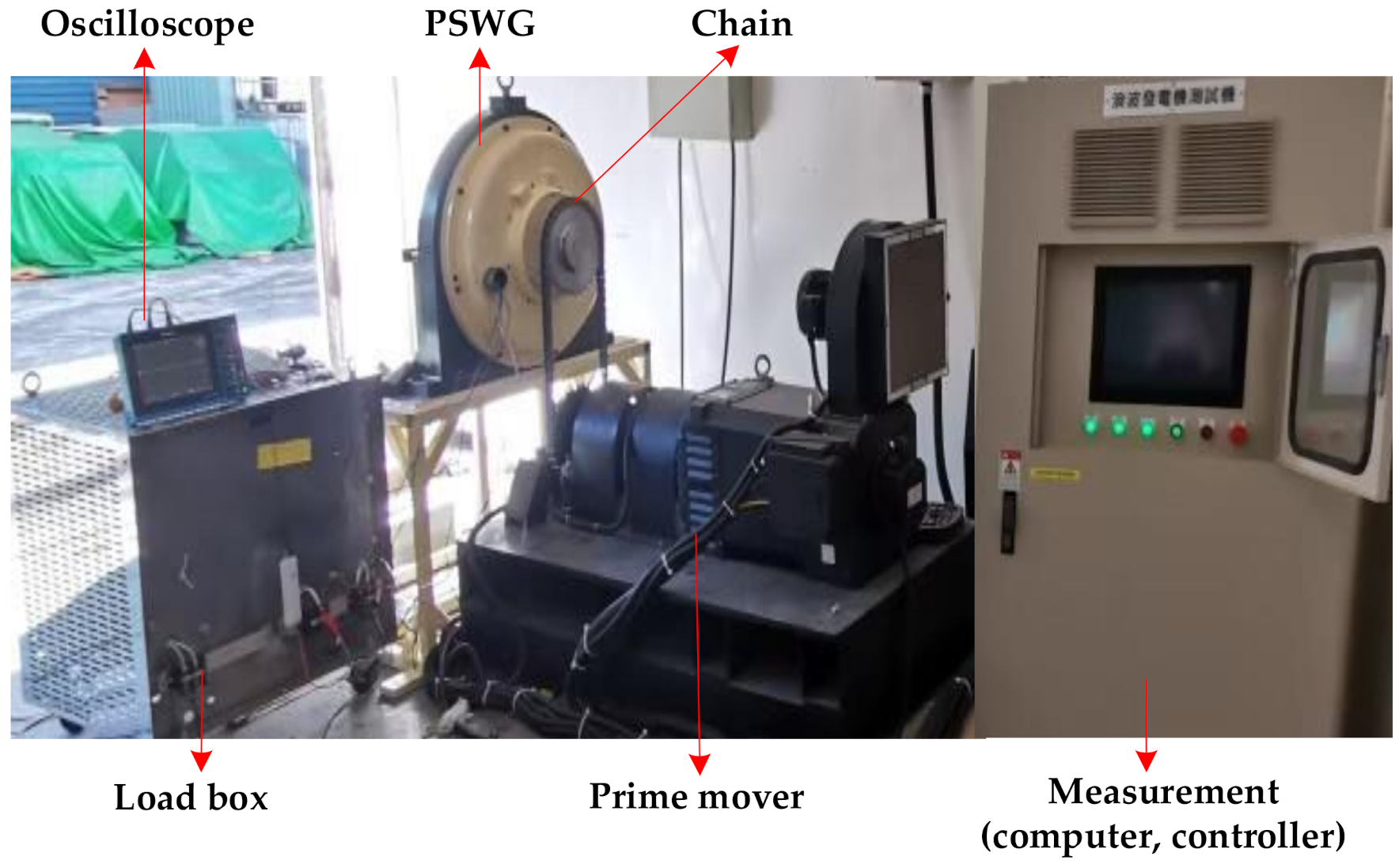
4.1. Product Implementation
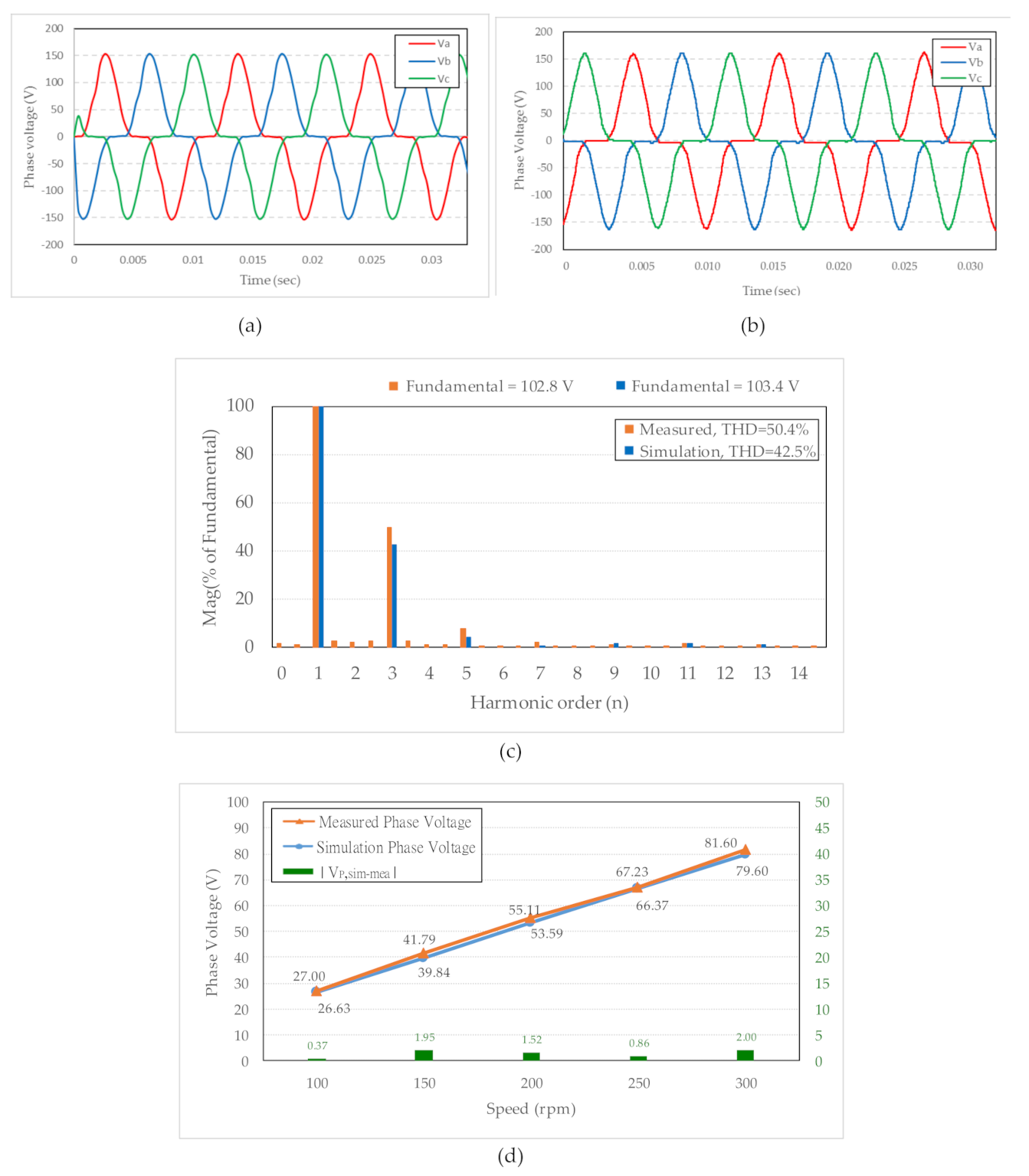
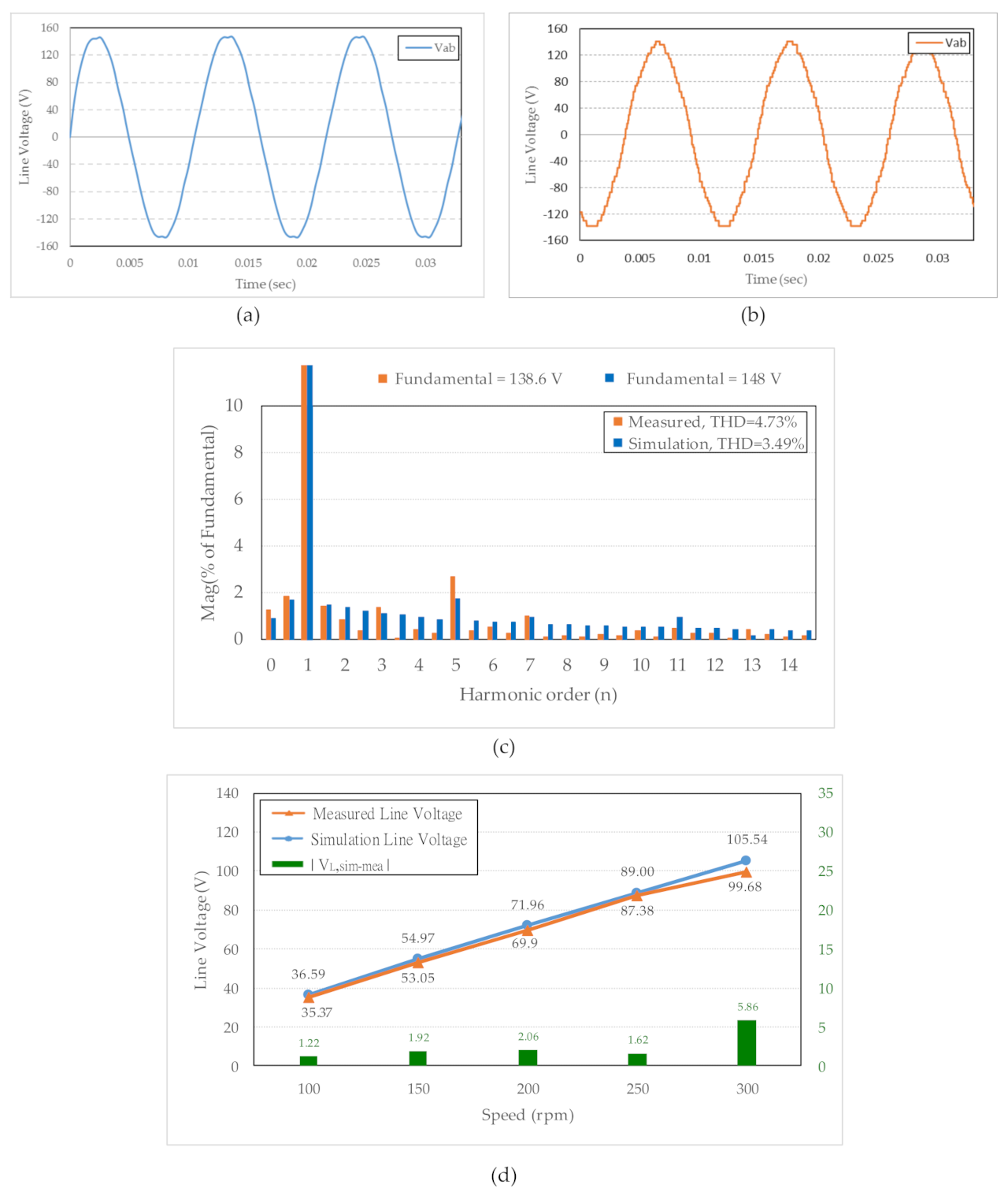
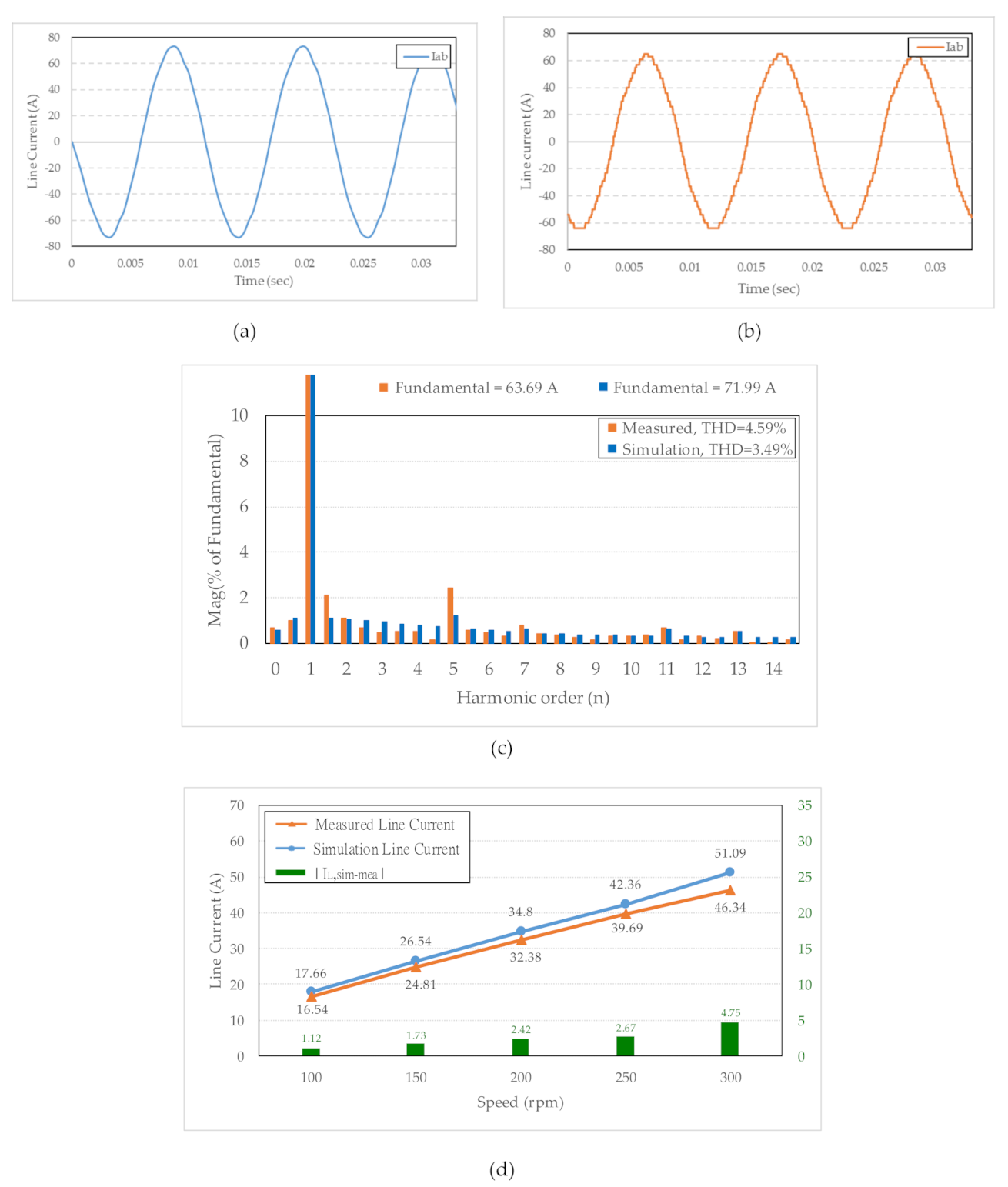
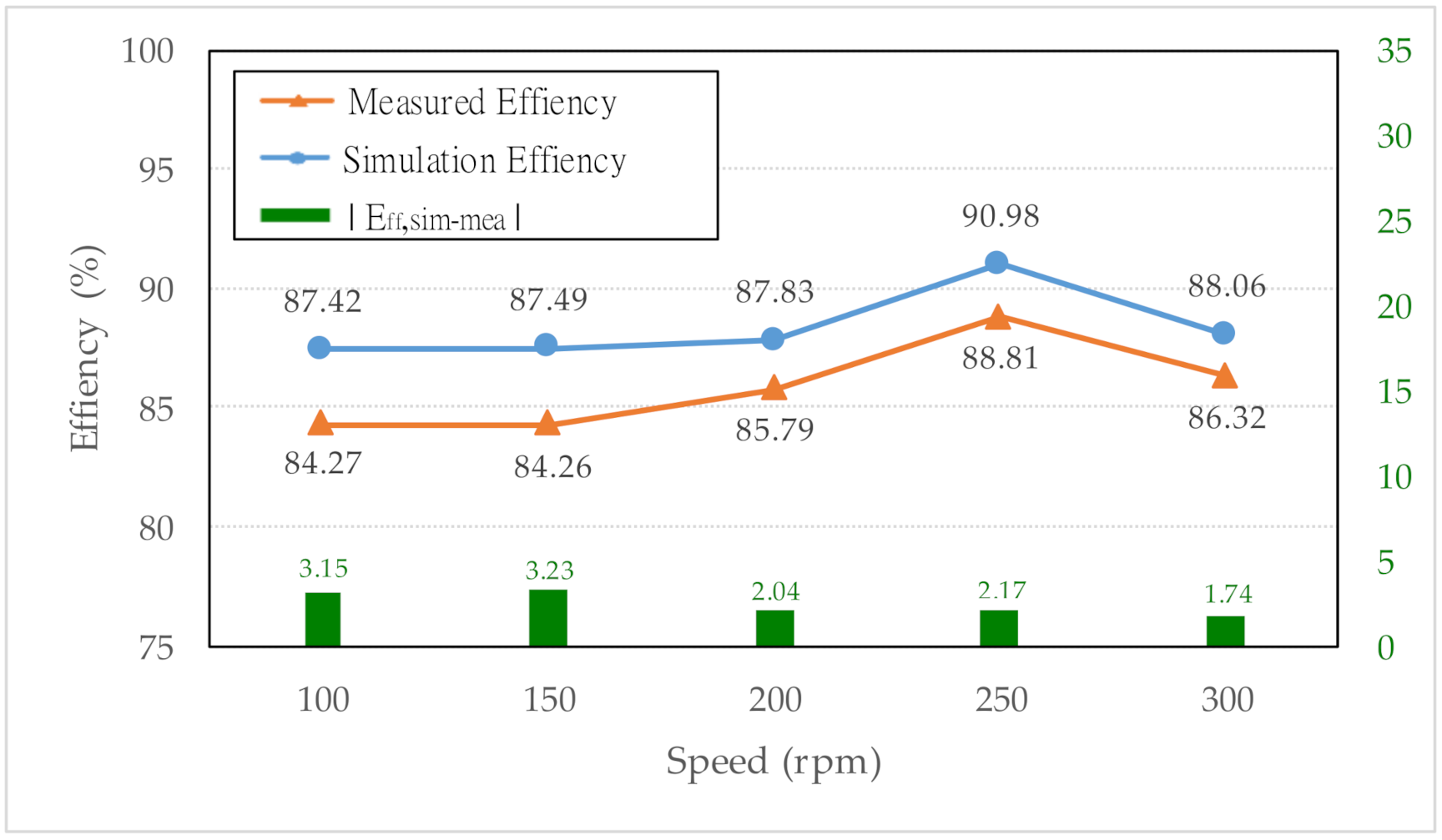
4.2. Experimental and Simulated Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Halamay, D.A.; Brekken, T.K.A.; Simmons, A.; McArthur, S. Reserve Requirement Impacts of Large-Scale Integration of Wind, Solar, and Ocean Wave Power Generation. IEEE Trans. Sustain. Energy 2011, 2, 321–328. [Google Scholar] [CrossRef]
- Jiang, L.; Chi, Y.; Qin, H.; Pei, Z.; Li, Q.; Liu, M.; Bai, J.; Wang, W.; Feng, S.; Kong, W.; et al. Wind Energy in China. IEEE Power Energy Mag. 2011, 9, 36–46. [Google Scholar] [CrossRef]
- Trainer, T. The limits to solar thermal electricity. Energy Policy 2014, 73, 57–64. [Google Scholar] [CrossRef]
- Vining, J.G.; Muetze, A. Economic factors and incentives for ocean wave energy conversion. IEEE Trans. Ind. Appl. 2009, 45, 547–554. [Google Scholar] [CrossRef]
- World Energy Council (WEC). Renewable Energy Resources: Opportunities and Constraints 1990–2020; Technical Report; World Energy Council: London, UK, 1993. [Google Scholar]
- Soukissian, T.H.; Denaxa, D.; Karathanasi, F.; Prospathopoulos, A.; Sarantakos, K.; Iona, A.; Georgantas, K.; Mavrakos, S. Marine Renewable Energy in the Mediterranean Sea: Status and Perspectives. Energies 2017, 10, 1512. [Google Scholar] [CrossRef] [Green Version]
- Williamson, B.J.; Blondel, P.; Armstrong, E.; Bell, P.S.; Hall, C.; Waggitt, J.J.; Scott, B.E. A Self-Contained Subsea Platform for Acoustic Monitoring of the Environment Around Marine Renewable Energy Devices–Field Deployments at Wave and Tidal Energy Sites in Orkney, Scotland. IEEE J. Ocean. Eng. 2016, 41, 67–81. [Google Scholar]
- Hamilton, R.J. DC motor brush life. IEEE Trans. Ind. Appl. 2000, 36, 1682–1687. [Google Scholar] [CrossRef]
- Ngu, S.S.; Dorrell, D.G.; Cossar, C. Design and operation of very slow speed generators for a Bristol cylinder sea wave generating device. IEEE Trans. Ind. Appl. 2014, 50, 2749–2759. [Google Scholar] [CrossRef]
- Polinder, H.; Damen, M.E.C.; Gardner, F. Linear PM generator system for wave energy conversion in the AWS. IEEE Trans. Energy Convers. 2004, 19, 583–589. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.Y.; Yu, H.T.; Hu, M.Q.; Liu, Q.; Zhou, S.G. Detent force reduction in permanent magnet tubular linear generator for direct-driver wave energy conversion. IEEE Trans. Magn. 2013, 49, 1913–1916. [Google Scholar] [CrossRef]
- So, R.; Simmons, A.; Simmons, T.; Ruehl, K. Development of PTO-Sim: A power performance module for the open-source wave energy converter code WEC-Sim. In Proceedings of the ASME 2015 34th International Conference on Ocean, Offshore and Arctic Engineerin, St. John’s, NL, Canada, 31 May—5 June 2015; pp. 1–10. [Google Scholar]
- Fang, H.W.; Cheng, J.J.; Ren, Y.Q. Force analysis of float-type wave energy converter. J. Tianjin Univ. 2014, 47, 446–451. [Google Scholar]
- Jing, Z.; Yu, H.T.; Shi, Z.C. Design and Experiment Analysis of a Direct-Drive Wave Energy Converter with a Linear Generator. Energies 2018, 4, 735. [Google Scholar]
- Mendes, R.; Calado, M.D.R.; Mariano, S. Maximum Power Point Tracking for a Point Absorber Device with a Tubular Linear Switched Reluctance Generator. Energies 2018, 9, 2192. [Google Scholar] [CrossRef] [Green Version]
- Zhu, L.; Jiang, S.Z.; Zhu, Z.Q.; Chan, C.C. Analytical methods for minimizing cogging torque in permanent-magnet machines. IEEE Trans. Magn. 2009, 45, 2023–2031. [Google Scholar] [CrossRef]
- Bianchi, N.; Bolognani, S. Design techniques for reducing the cogging torque in surface-mounted pm motors. IEEE Trans. Ind. Appl. 2002, 38, 1259–1265. [Google Scholar] [CrossRef]
- Azar, Z.; Zhu, Z.Q.; Ombach, G. Influence of electric loading and magnetic saturation on cogging torque, back-emf and torque ripple of pm machines. IEEE Trans. Magn. 2012, 48, 2650–2658. [Google Scholar] [CrossRef]
- Jiang, J.W.; Bilgin, B.; Yang, Y.; Sathyan, A.; Dadkhah, H.; Emadi, A. Rotor skew pattern design and optimization for cogging torque reduction. IET Electr. Syst. Transp. 2016, 6, 126–135. [Google Scholar] [CrossRef]
- Washington, J.G.; Atkinson, G.J.; Baker, N.J. Reduction of cogging torque and emf harmonics in modulated pole machines. IEEE Trans. Energy Convers. 2016, 31, 759–768. [Google Scholar] [CrossRef]
- Phadke, M.S. Quality Engineering Using Robust Design; Prentice Hall: Hoboken, NJ, USA, 1995; pp. 61–232. [Google Scholar]
- Ross, P.J. Taguchi Techniques for Quality Engineering; McGraw-Hill Book Company: New York, NY, USA, 1995; pp. 103–107. [Google Scholar]
- Lee, H.H. Taguchi Methods: Principles and Practices of Quality Design; Gau Lih Book Company Ltd.: Taipei, Taiwan, 2011; pp. 95–326. [Google Scholar]
- Kim, K.C.; Lee, J.; Kim, H.J.; Koo, D.H. Multiobjective optimal design for interior permanent magnet synchronous motor. IEEE Trans. Magn. 2009, 45, 1780–1783. [Google Scholar]
- Kim, S.I.; Lee, J.Y.; Kim, Y.K.; Kim, Y.K.; Hong, J.P.; Hur, Y.; Jung, Y.H. Optimization for reduction of torque ripple in interior permanent magnet motor by using the Taguchi method. IEEE Trans. Magn. 2005, 41, 1796–1799. [Google Scholar]
- Hwang, C.C.; Lyu, L.Y.; Liu, C.T.; Li, P.L. Optimal design of an spm motor using genetic algorithms and Taguchi method. IEEE Trans. Magn. 2008, 44, 4325–4328. [Google Scholar] [CrossRef]
- Hwang, C.C.; Li, P.L.; Liu, C.T. Optimal design of a permanent magnet linear synchronous motor with low cogging force. IEEE Trans. Magn. 2012, 48, 1039–1042. [Google Scholar] [CrossRef]
- Cui, J.; Xiao, W.; Zou, W.; Liu, S.; Liu, Q. Design optimization of submersible permanent magnet synchronous motor by com-bined DOE and Taguchi approach. IET Electr. Power Appl. 2020, 14, 1060–1066. [Google Scholar] [CrossRef]
- Lim, D.K.; Jung, S.Y.; Yi, K.P.; Jung, H.K. A Novel Sequential-Stage Optimization Strategy for an Interior Permanent Magnet Synchronous Generator Design. IEEE Trans. Ind. Electron. 2018, 65, 1781–1790. [Google Scholar] [CrossRef]
- Reza, N.Z.; Akbar, M.A.; Karim, A. Design Optimization of a Transverse Flux Halbach-Array PM Generator for Direct Drive Wind Turbines. IEEE Trans. Energy Convers. 2020, 35, 1485–1493. [Google Scholar]
- Hanselman, D. Brushless Permanent Magnet Motor Design; Manga Physics Pub.: Orono, ME, USA, 2003. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structural Parameters (Unit) | Value |
|---|---|
| Number of slots | 108 |
| Number of poles | 36 |
| Stator inner diameter (mm) | 318 |
| Stator outer diameter (mm) | 435 |
| Rotor outer diameter (mm) | 470 |
| Rotor inner diameter (mm) | 438 |
| Product thickness (mm) | 55 |
| Air gap length (mm) | 1.5 |
| Coil turns | 44 |
| Stator material | 50CS470 |
| Magnet material | N35 |
| Magnet thickness (mm) | 6 |
| Factor | Items | Level 1 | Level 2 | Level 3 | Level 4 | ||
|---|---|---|---|---|---|---|---|
| A | d1 | Shoes outer length | (mm) | 1.2 | 1.6 | 2.0 | 2.4 |
| B | lso | Slot opening width | (mm) | 1.8 | 3.0 | 4.3 | 5.5 |
| C | wcurve | Pole–pitch ratio | 0.6 | 0.7 | 0.8 | 0.9 | |
| D | larc | Pole–arc ratio | (%) | 0 | 30 | 60 | 90 |
| E | lm | Magnet thickness | (mm) | 4.5 | 5.0 | 5.5 | 6.0 |
| A (mm) | B (mm) | C | D (%) | E (mm) | Output Power (W) | S/N Ratio | |
|---|---|---|---|---|---|---|---|
| 1 | 1.2 | 1.8 | 0.6 | 0 | 4.5 | 6273 | 75.95 |
| 2 | 1.2 | 3.0 | 0.7 | 30 | 5.0 | 7213 | 77.16 |
| 3 | 1.2 | 4.3 | 0.8 | 60 | 5.5 | 7740 | 77.78 |
| 4 | 1.2 | 5.5 | 0.9 | 90 | 6.0 | 7827 | 77.87 |
| 5 | 1.6 | 1.8 | 0.7 | 60 | 6.0 | 7561 | 77.57 |
| 6 | 1.6 | 3.0 | 0.6 | 90 | 5.5 | 6185 | 75.83 |
| 7 | 1.6 | 4.3 | 0.9 | 0 | 5.0 | 7709 | 77.74 |
| 8 | 1.6 | 5.5 | 0.8 | 30 | 4.5 | 6931 | 76.82 |
| 9 | 2.0 | 1.8 | 0.8 | 90 | 5.0 | 7518 | 77.52 |
| 10 | 2.0 | 3.0 | 0.9 | 60 | 4.5 | 7524 | 77.53 |
| 11 | 2.0 | 4.3 | 0.6 | 30 | 6.0 | 6736 | 76.57 |
| 12 | 2.0 | 5.5 | 0.7 | 0 | 5.5 | 7104 | 77.03 |
| 13 | 2.4 | 1.8 | 0.9 | 30 | 5.5 | 7982 | 78.04 |
| 14 | 2.4 | 3.0 | 0.8 | 0 | 6.0 | 8126 | 78.20 |
| 15 | 2.4 | 4.3 | 0.7 | 90 | 4.5 | 6470 | 76.22 |
| 16 | 2.4 | 5.5 | 0.6 | 60 | 5.0 | 5761 | 75.21 |
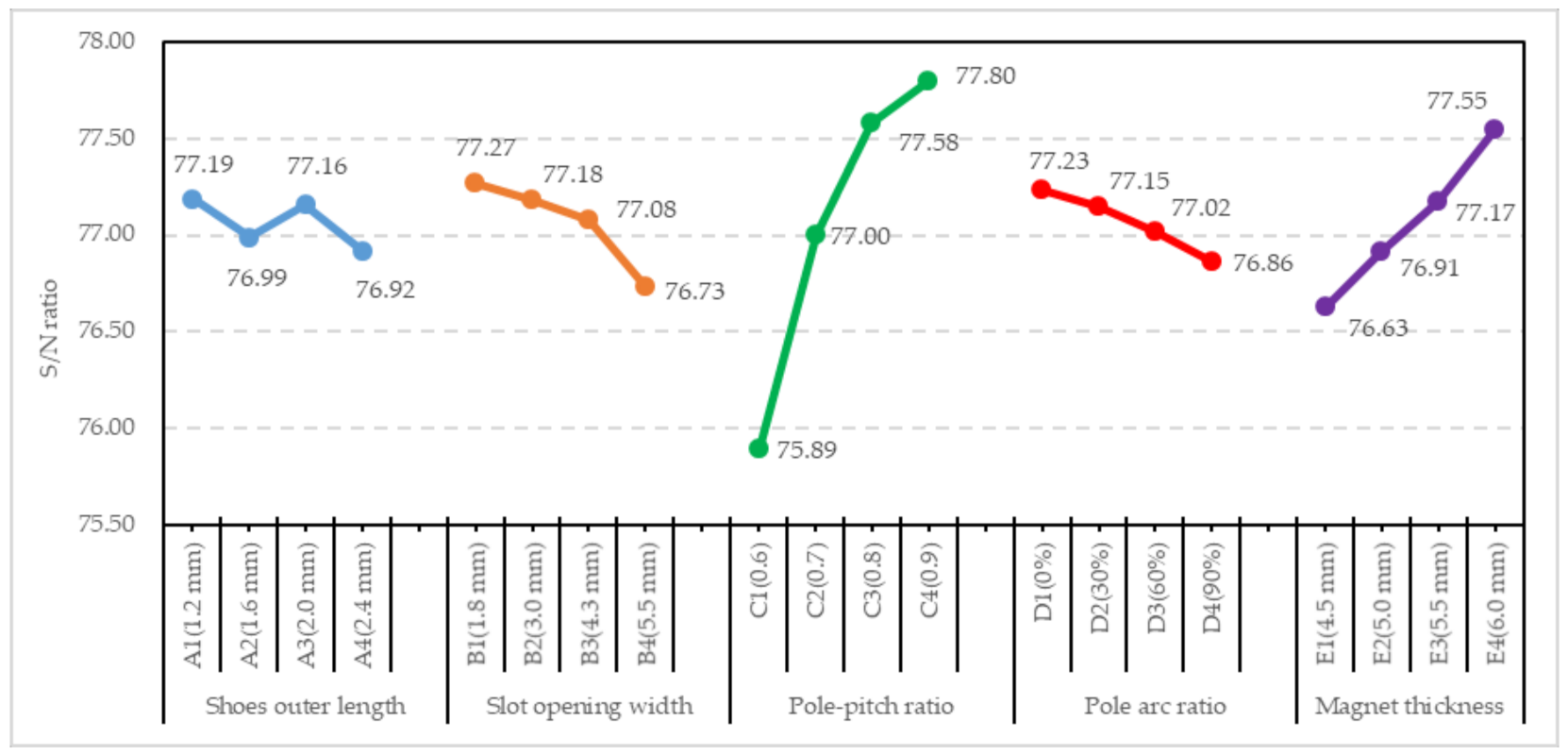
| Factor | A | B | C | D | E |
|---|---|---|---|---|---|
| Level 1 | 77.19 | 77.27 | 75.89 | 77.23 | 76.63 |
| Level 2 | 76.99 | 77.18 | 77.00 | 77.15 | 76.91 |
| Level 3 | 77.16 | 77.08 | 77.58 | 77.02 | 77.17 |
| Level 4 | 76.92 | 76.73 | 77.80 | 76.86 | 77.55 |
| Level,max–Level,min | 0.27 | 0.54 | 1.91 | 0.37 | 0.92 |
| Rank | 5 | 3 | 1 | 4 | 2 |
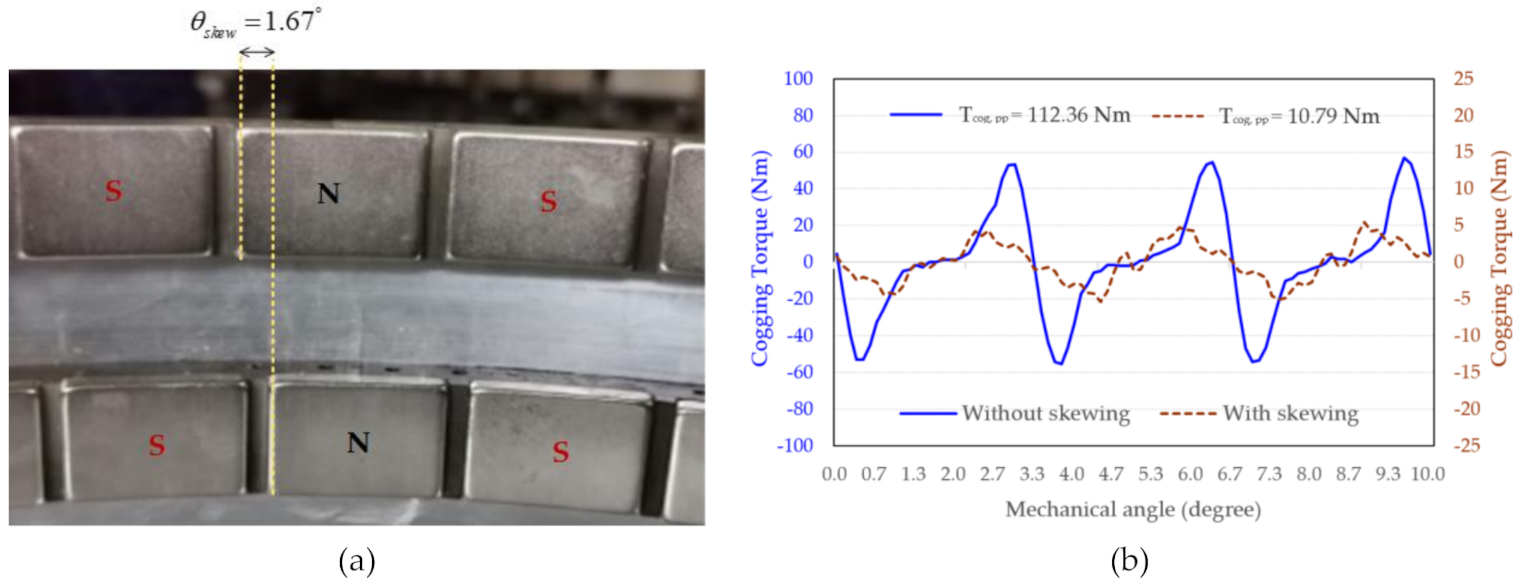
| Characteristics | Without Skewing | With Skewing | Difference (%) | |
|---|---|---|---|---|
| Rated Speed | (rpm) | 300 | 300 | - |
| Cogging Torque | (N-m) | 112.36 | 10.79 | −90.40 |
| Torque | (N-m) | 350.64 | 337.6 | −5.59 |
| Torque ripple | (%) | 28.26 | 5.72 | −22.54 |
| Output Power | (W) | 8675.84 | 9339.28 | +7.65 |
| Efficiency | (%) | 79.00 | 88.06 | +9.06 |
| Rotor material | 50CS470 | 50CS470 | - | |
| Stator material | 50CS470 | 50CS470 | - | |
| Permanent magnet | N35 | N35 | - | |
| Rotor steel weight | (kg) | 6.12 | 6.12 | 0 |
| Stator steel weight | (kg) | 21.61 | 18.92 | −12.45 |
| PM weight | (kg) | 2.72 | 3.12 | +14.71 |
| Copper weight | (kg) | 4.921 | 4.921 | 0 |
| Simulated Result | ||||
| Speed (rpm) | Input Torque (N-m) | Pin (W) | Pout (W) | Efficiency (%) |
| 100 | 122.26 | 1280.30 | 1119.22 | 87.42 |
| 150 | 183.87 | 2888.22 | 2526.90 | 87.49 |
| 200 | 235.80 | 4938.58 | 4337.42 | 87.83 |
| 250 | 274.15 | 7177.23 | 6529.90 | 90.98 |
| 300 | 337.60 | 11862.65 | 9339.28 | 88.06 |
| Measured Result | ||||
| Speed (rpm) | Input Torque (N-m) | Pin (W) | Pout (W) | Efficiency (%) |
| 100 | 114.82 | 1202.39 | 1013.28 | 84.27 |
| 150 | 172.23 | 2705.38 | 2279.67 | 84.26 |
| 200 | 218.19 | 4569.76 | 3920.26 | 85.79 |
| 250 | 258.35 | 6763.59 | 6006.95 | 88.81 |
| 300 | 295.02 | 9268.33 | 8000.64 | 86.32 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hsiao, C.-Y.; Lai, C.-H.; Zheng, Z.-X.; Li, G.-Y. Design and Implement of Three-Phase Permanent-Magnet Synchronous Wave Generator using Taguchi Approach. Energies 2021, 14, 2010. https://doi.org/10.3390/en14072010
Hsiao C-Y, Lai C-H, Zheng Z-X, Li G-Y. Design and Implement of Three-Phase Permanent-Magnet Synchronous Wave Generator using Taguchi Approach. Energies. 2021; 14(7):2010. https://doi.org/10.3390/en14072010
Chicago/Turabian StyleHsiao, Chun-Yu, Chin-Hsiang Lai, Zhu-Xuan Zheng, and Guan-Yu Li. 2021. "Design and Implement of Three-Phase Permanent-Magnet Synchronous Wave Generator using Taguchi Approach" Energies 14, no. 7: 2010. https://doi.org/10.3390/en14072010
APA StyleHsiao, C. -Y., Lai, C. -H., Zheng, Z. -X., & Li, G. -Y. (2021). Design and Implement of Three-Phase Permanent-Magnet Synchronous Wave Generator using Taguchi Approach. Energies, 14(7), 2010. https://doi.org/10.3390/en14072010