1. Introduction
Multilevel inverter (MLI) topologies have attracted interest in a variety of applications, including grid-connected PV applications, static VAR compensators, and active-power-filter (APF) applications. MLIs have many advantages over conventional inverters, such as reducing the total harmonic distortion (THD) of the produced voltage and current, reducing the size of filters, reducing the switching frequency, and improving the inverter efficiency [
1]. Many cascaded inverter topologies have been proposed in the literature [
2]. Of these, cascaded H-bridge (CHB) topologies have advantages over other MLI topologies (e.g., layout simplicity, extreme modularity, and construction and control simplicity) because they are free of voltage-balance issues. Moreover, compared to other MLI topologies, CHB topologies use the fewest components at the same voltage levels [
3,
4]. Asymmetrical CHB topologies have been proposed in which the DC voltages are not symmetrical. The combination of these asymmetrical DC voltages results in the generation of increased voltage levels [
5,
6]. On the other hand, hybrid MLI topologies presented in the literature have been based on a three-phase voltage source inverter (VSI) unit with a CHB. In these topologies, H-bridge units are coupled to floating capacitors whose voltages must be carefully regulated. This complicates the control algorithm [
7,
8].
Recently, research into the development of APF applications has increased [
9,
10]. APFs are electronic devices that can be accurately used to eliminate the harmonic contents in a current. The harmonics in power systems can be created by nonlinear loads connected to the public grid. Some of these loads are computers with a switched-mode power supply, motor drives, and electronic light ballasts (fax machines, medical equipment, etc.). These harmonics may cause unwanted effects, such as heating of sensitive electrical equipment or of the generators and transformers, which leads to increased core loss and may cause transformer and equipment failure, random circuit breaker tripping, flickering lights, high neutral currents due to zero sequence harmonics, and conductor losses [
11]. As a result, these harmonics must be eliminated. There are three different types of harmonic filters: passive, active, and hybrid. The advantages of APFs over passive filters are numerous. They can, for example, suppress supply-current harmonics as well as reactive currents. On the other hand, certain harmonics will involve their own passive filter, hence there will be more passive filters needed if there are more harmonics to remove. Because only large harmonics with lower frequencies are usually removed, the filters will be bulky due to the geometric size of the inductor [
12]. In contrast to passive power filters, APFs can eliminate any harmonics by using a suitable control and the performance of APFs is unaffected by the characteristics of the power distribution system [
9,
11,
13,
14].
Several APF topologies using the conventional three-phase VSI have been proposed [
15,
16,
17]. In addition, some of the proposed APFs were based on the classical three-level H-bridge inverter [
18]. Recently, the use of MLI topologies in APF applications has become a hot topic [
19,
20]. An APF based on a seven-level neutral-point clamped (NPC) MLI was proposed in [
21]. The authors used LS–PWM and fuzzy control approaches to eliminate current harmonics generated by nonlinear loads. Others [
19] used a three-level NPC for active-power-filter applications. The authors used a fuzzy-logic controller and a fractional-order proportional-integral (PI) controller to control the proposed system. From another point of view, an APF based on a three level NPC-T type was proposed in [
20,
22]. The authors in [
23] proposed a five-level HB-NPC MLI for APF applications with an experimental validation. Other authors used a CHB for APF applications due it the advantages of the CHB such as simplicity and possession of a high modularity [
24,
25]. Both CHN topologies were proposed for APFs either by directly connecting the H-bridges in series or by cascading the H-bridges using transformers [
26,
27,
28]. Moreover, cascaded MLI topologies are used for APF applications [
29,
30]. The authors in [
30] proposed a shunt APF based on cascaded MLI topology using a single power source with three-phase transformers. The proposed scheme could adjust for polluted loads with high harmonics and a poor power factor. To compute compensating currents, the dq theory was applied. A prototype was built to validate the simulation results by the experimental results.
In this paper, a hybrid MLI topology is proposed for APF applications. The proposed MLI topology conjoins the cascaded H-bridge MLI and the cascaded three-phase VSI topology using open-end windings and was first proposed and tested under different load parameters, as presented in [
31]. In addition, this new topology has been patented, as seen in [
32]. However, the previous paper focused only on the topology itself. The topology was not used in any applications. This paper is the first to detail the utilization of the new topology for the active power filter and for grid-connected PVs. The proposed MLI is used to compensate the harmonic currents of the nonlinear load, while the grid supplies the fundamental positive-sequence currents of the load. A closed-loop control is proposed for both applications—the APF and the PV–grid connection. Finally, the proposed MLI was experimentally implemented in the lab, and it was tested for the two applications.
The rest of the paper is structured as follows: the suggested APF topology and corresponding control approaches are discussed in
Section 2, the simulation results are described in
Section 3, and experimental validation of the proposed topology for the two applications is described in the
Section 4.
2. The Proposed Hybrid Active-Power-Filter Topology
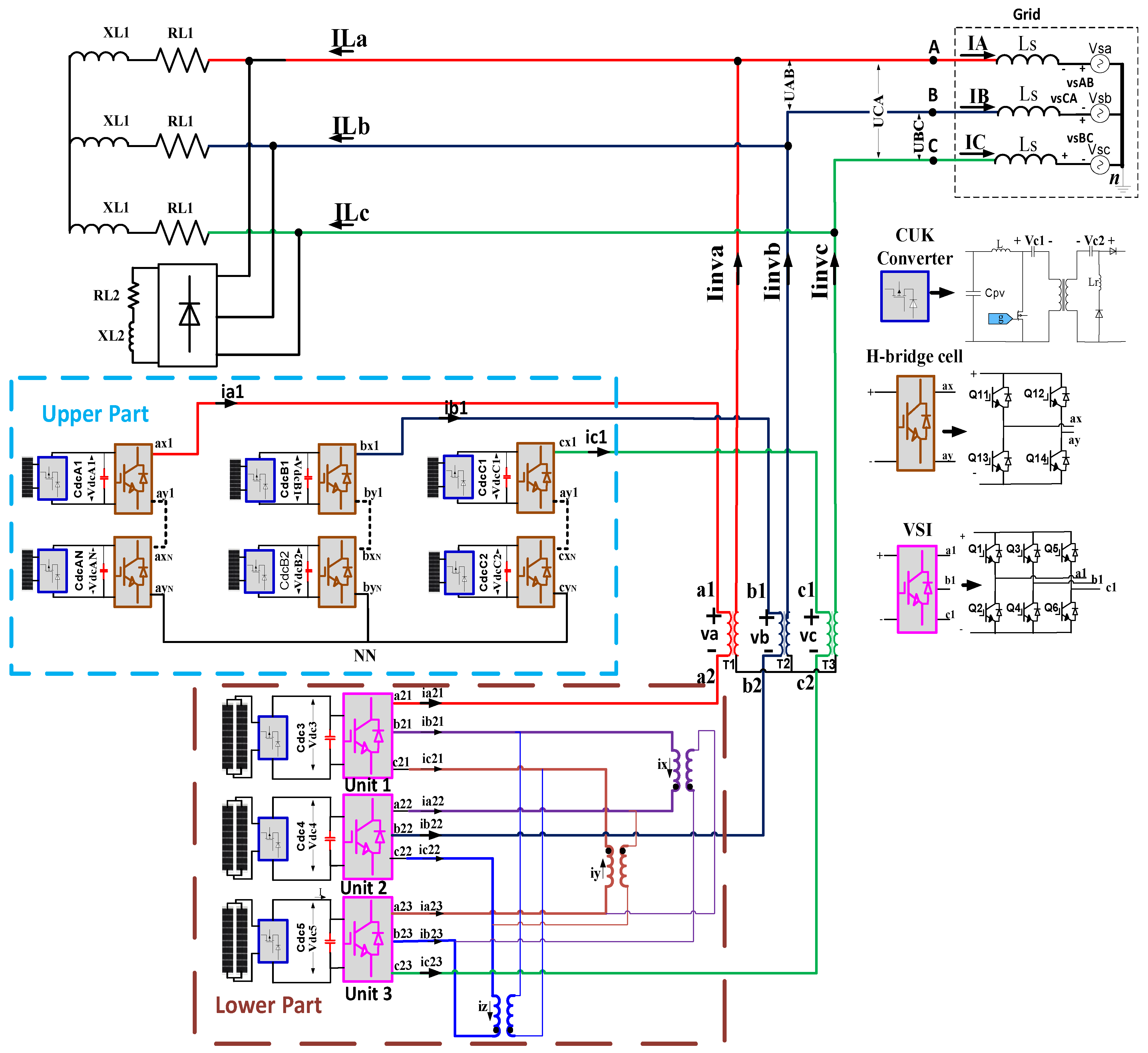
A three-phase multilevel high-voltage/high-power converter is used in this topology. It is a hybrid arrangement that combines two common multilevel configurations: a cascaded H-bridge MLI and a three-phase cascaded VSI. These two configurations are joined together to create the hybrid configuration.
Figure 1 depicts the suggested cascaded MLI architecture. This novel topology has been given a patent with the number US 10, 141, 865 B1. It is suitable for a wide variety of grid-connected applications, including power-factor correction, static-VAR compensation, and grid-connected photovoltaic (PV) systems. The proposed architecture is made up of two components linked by an open-end windings transformer.
As shown in this figure, the proposed MLI is capable of supplying the extracted PV power to the nonlinear loads and of injecting power into the grid. The idea is to compensate the harmonics generated by the nonlinear loads while supplying balanced three-phase currents to the grid. The control scheme proposed in [
33] has been extended to be used for the proposed APF in this paper. The proposed control scheme is used to inject balanced three-phase low harmonic currents into the grid. If the three-phase loads are nonlinear, then the load currents will contain harmonics, which may reduce the current quality of the grid. Therefore, the harmonic contents of the load currents must be extracted to be compensated by the MLI. Consequently, the grid current will be balanced and contain low harmonic contents. The current of the nonlinear loads may contain positive-, negative-, or zero-sequence harmonics.
Therefore, the following steps are considered:
where
are the zero, positive, and negative components of the load currents, respectively.
- 2.
The maximum value of the fundamental component of the load current is extracted, and the harmonic contents of the load currents can be extracted by the following equation:
where
are the extracted harmonic components of the load currents of phases a, b, and c, respectively.
- 3.
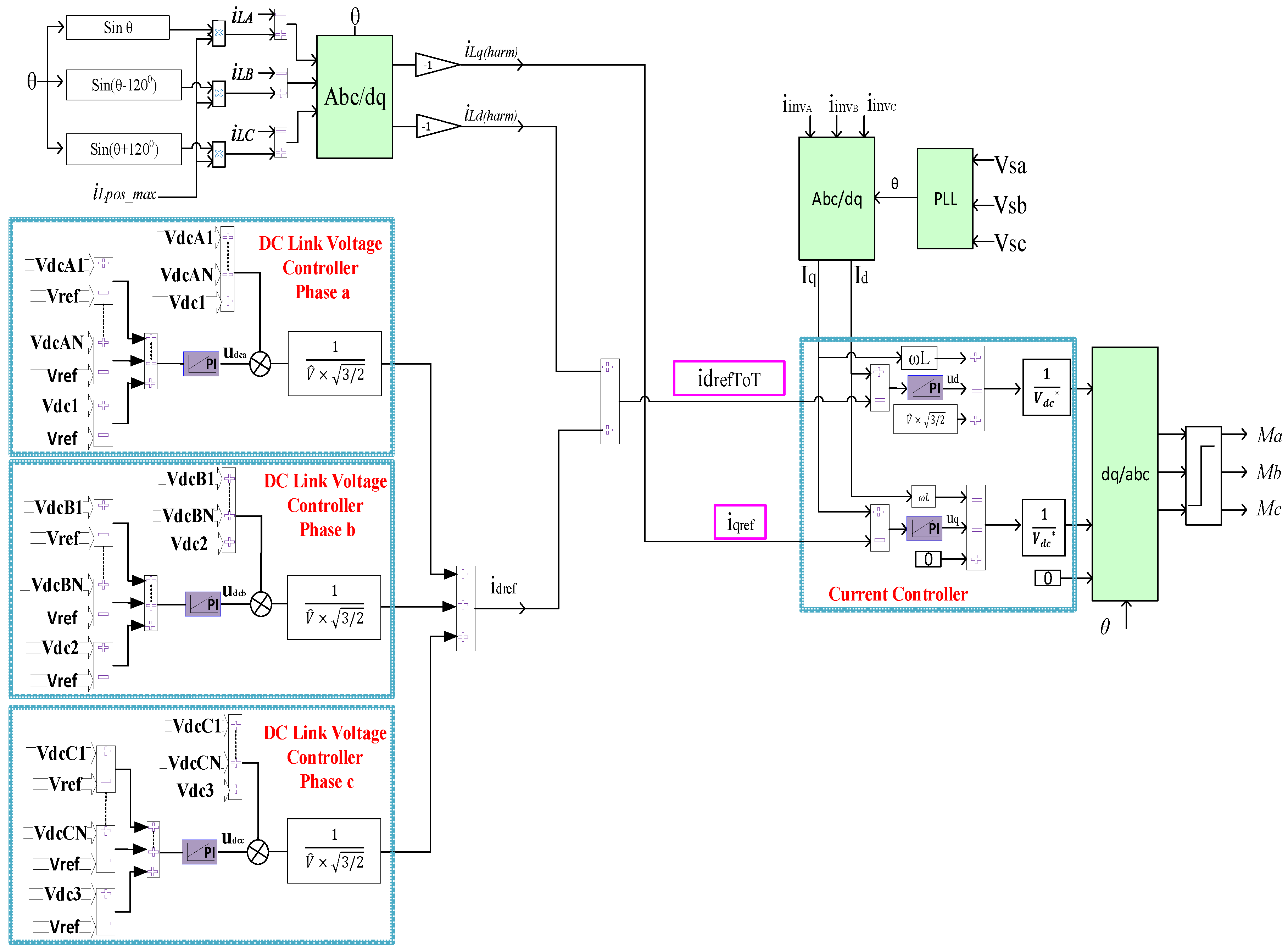
The extracted harmonic components of the load currents are then converted into a dq frame as shown in
Figure 2.
From another perspective, the main goal of the control scheme is to produce reference currents that deliver only available active power to the grid while maintaining unity power factor. The DC links share the same active phase grid currents. These DC-link voltages are compared to their respective reference voltages.
If the DC-link voltages are accurately regulated by the control system, then:
where
are the corresponding DC-link voltages of the phases a, b, and c, respectively.
The d-q components of the terminal voltages of the proposed MLI are given by:
The sequential function
is given by:
The DC link current is defined as follows:
Analyzing nonlinearity problems requires presention of a new model. These inputs could be written as:
To ensure the unity power factor, the reactive current
in Equation (6) should be set to zero. Therefore,
In normal operation the following properties apply:
where
is the maximum grid voltage. Substituting Equation (8) in (9) yields:
The active current,
, is used to regulate the DC-link capacitors. As shown in Equation (10), the active reference current can be given as:
The reference active current of the grid is the sum of the three
active currents:
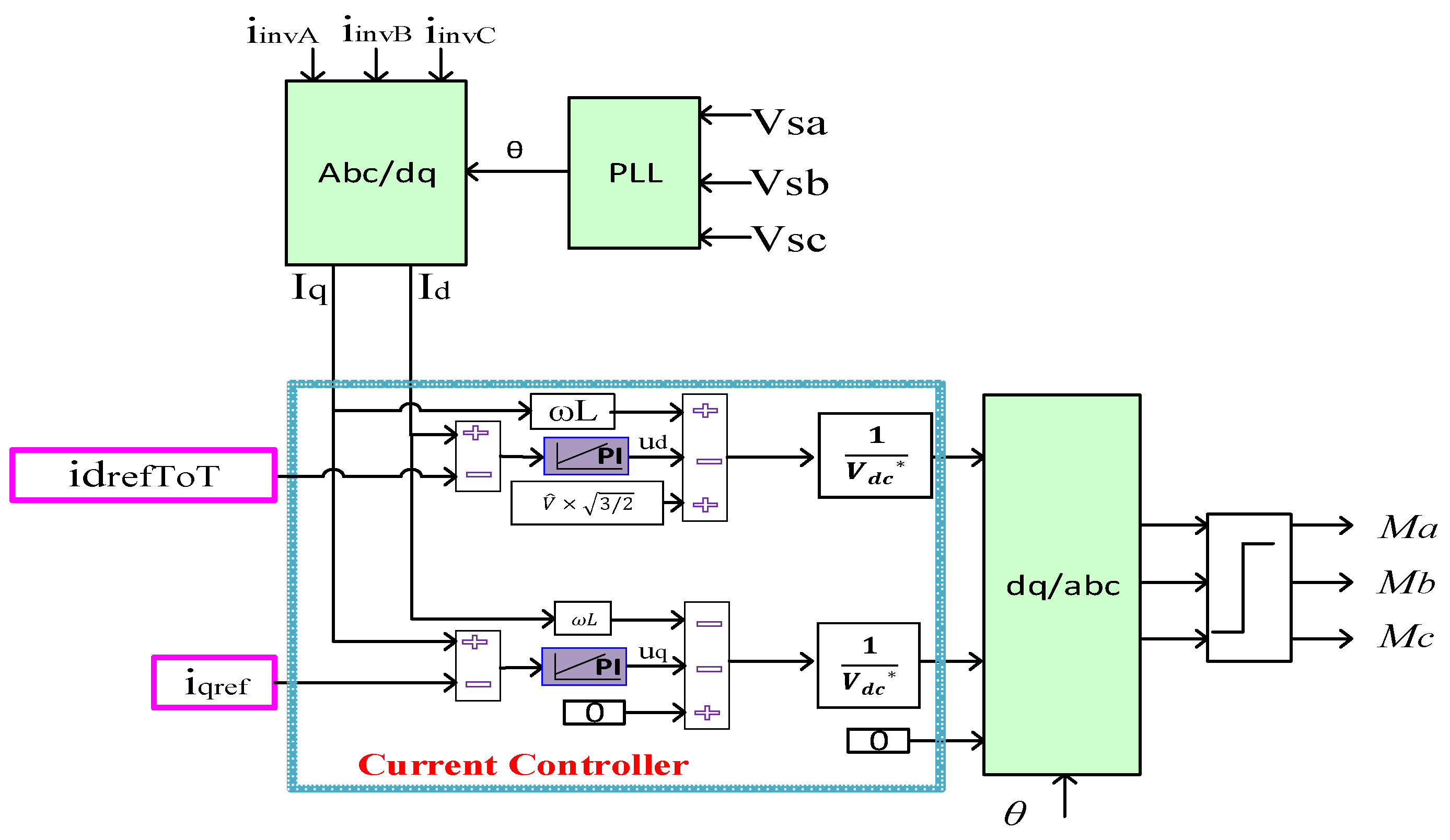
The DC-link voltage controllers of the proposed topology based on the analysis above can be seen in
Figure 3. As seen in the analysis, the resulting signal from the DC-link controllers is the reference active current of the inverter,
. The inner current controller can be seen in
Figure 4.
Where the proposed MLI is used in a PV application, the reference active grid current
is compared with the actual grid current, and the reference grid reactive current
is compared with the actual reactive grid current
to ensure unity power factor. However, where the proposed MLI is used in an APF application, the harmonic load current in the d axes
given from
Figure 2 is then added to the reference current in the d axes
generated form the DC-link controllers. The total reference inverter currents are given as:
Equation (13) states that the reference active current of the inverter equals the active current produced by the DC-links and the active harmonic load current. The complete proposed control scheme for APF application can be seen in
Figure 5.
According to the proposed control scheme, two cases can be applied:
- 1.
The proposed inverter acts as an active filter only.
The reference currents of the inverter are the harmonic load currents. The inverter is responsible for compensating the harmonic load currents while the grid supplies the fundamental positive-sequence currents of the load.
- 2.
The proposed inverter is responsible for delivering the PV power to the grid and the load.
If there is enough power at the DC side, e.g., from the PV modules, the control system drives the inverter to supply the balanced positive-sequence current to the grid, as well as supplies the active load current and compensates harmonic load currents.
In both cases, Equation (13) is applied to perform the current control stage. The load current harmonics are then transferred into the dq frame (
Figure 2). These currents are then used as reference MLI currents, which are then used in Equation (13). The resulting signals from
Figure 4,
and
, obtained from Equation (7), are then transformed into abc reference frame (
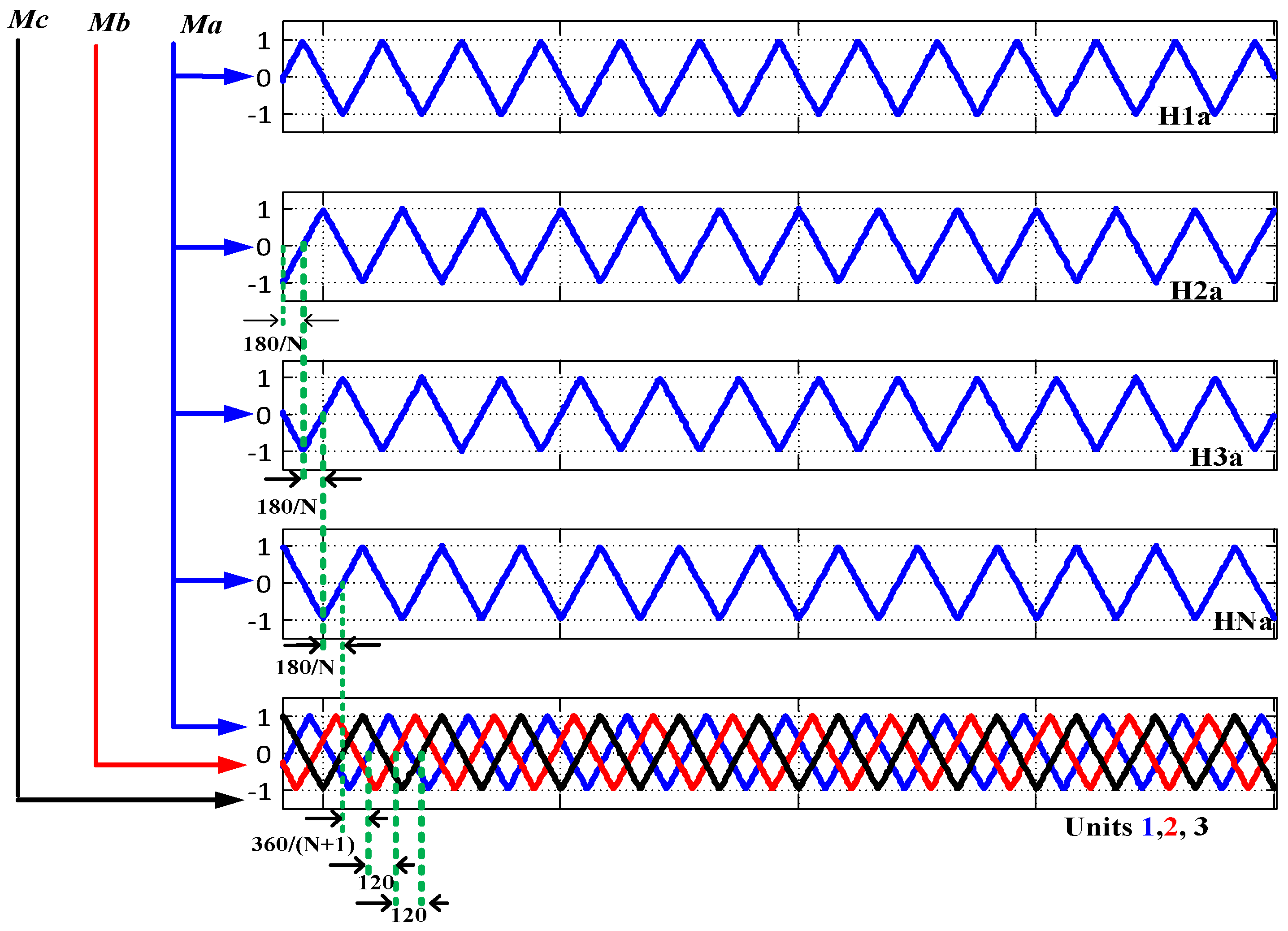
. These values are then compared to the triangle carrier waveforms in
Figure 6 to create switching pulses to operate the IGBTs of the proposed hybrid MLI. To produce the required pulses for the IGBTs of the upper part of the proposed MLI, the carrier waveform of the
is shifted from the
by 180°/N. Only the carrier waveforms of phase a in the upper part are displayed in
Figure 5. Moreover, the modulation waveforms
are also used to fire the IGBTs of the lower part in the proposed configuration by comparing them with the phase-shifted carrier signals, as seen in
Figure 6. The carrier signal, which is used to generate the pulses of unit 2, is shifted by (T/3) from that of unit 1, and the carrier signal of unit 3 is shifted by (T/3) from that of unit 2.
3. Simulation Results
The proposed topology was built in the SIMULINK environment. For simplicity, two H-bridge units were used per phase in the proposed topology. The system consisted of 12 HIT-N220A01 PV modules; six of them were connected to upper part of the proposed topology such that one PV module was linked to each H-bridge unit. The other six PV modules were connected to the lower part of the proposed MLI such that two parallel PV modules were linked to each VSI unit. Two cases were used in the simulation:
- A.
Grid-Connected PV Application Case
The system parameters used for simulation are shown in
Table 1, while
Table 2 shows the PV module parameters. The nonlinear load is disconnected from
Figure 1. Therefore, no harmonic current term is applied in Equation (2). The reference reactive current of the inverter was set to zero to guarantee unity power factor. The proposed topology was used only to connect the PV modules to the grid. The perturb and observe (P & O) algorithm was used to extract the maximum power from the PV modules. The closed-loop control scheme shown in
Figure 3 and
Figure 4 was used for grid-connection purposes.
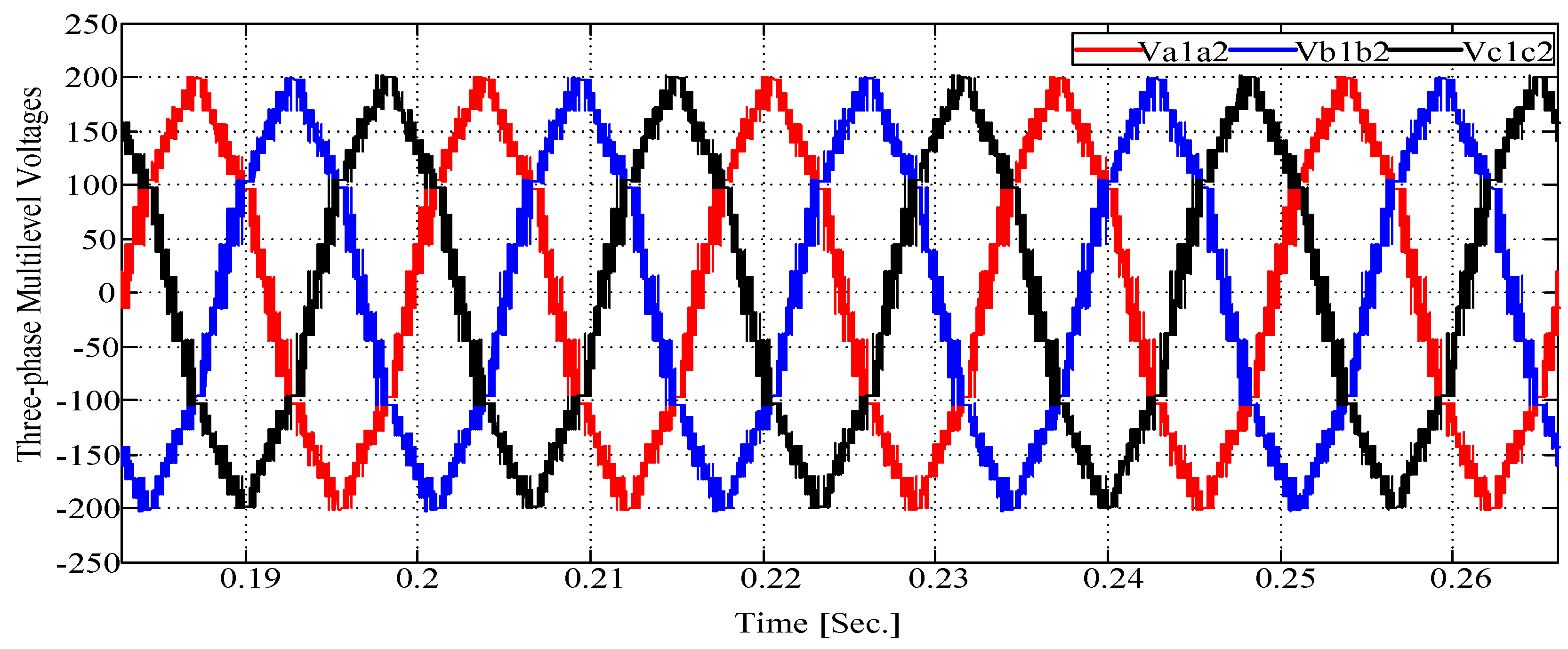
The generated three-phase voltages were measured across the primary windings of the transformers
,
, and
. The number of voltage steps produced from the proposed MLI was 22, as shown in
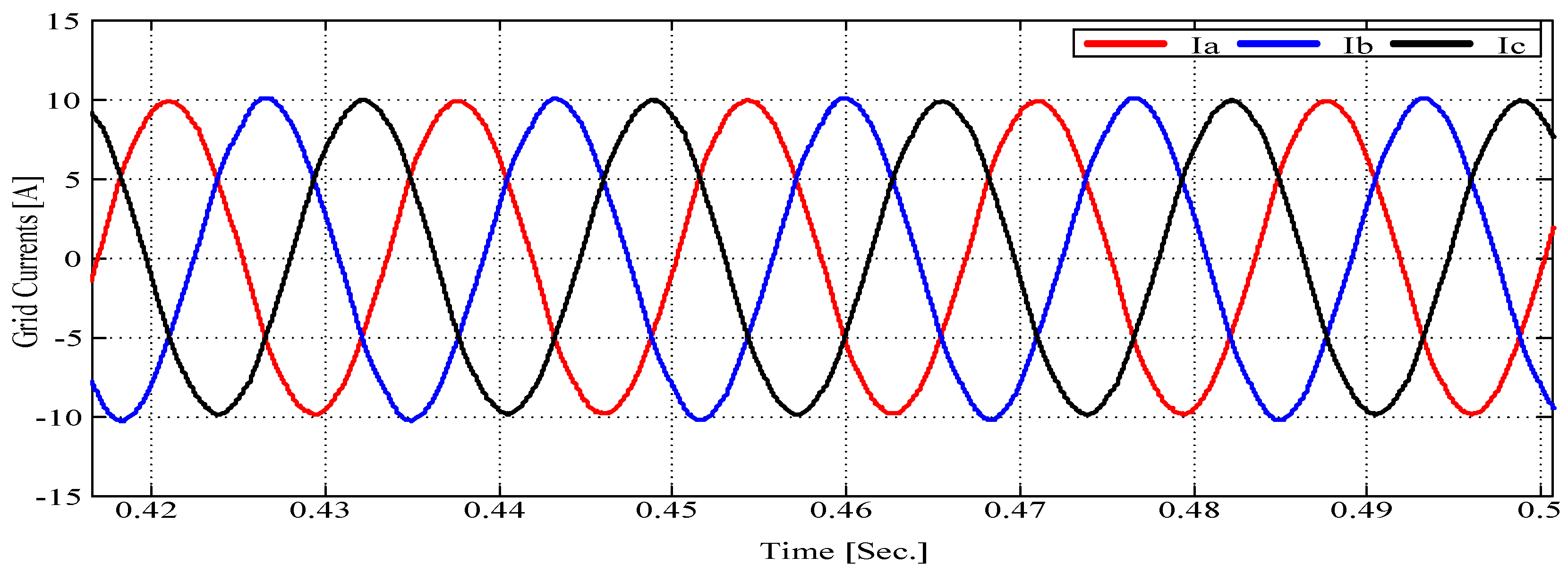
Figure 7. The three-phase currents injected into the grid can be seen in
Figure 8. In addition, the harmonic spectrum of the line current,
, is displayed in
Figure 9. The total harmonic distortion (THD) of the grid current,
, was 2.22%, which was less than the IEEE-519 standard limit of 5%.
The THD can be calculated according to the following equation:
where
h is the harmonic order,
is the RMS value of the current at h order, and
is the RMS value of the fundamental current.
As seen in
Figure 9, the first harmonic bands appear with an amplitude of 0.2% at two times the fundamental frequency. Then the third, fifth, and seventh harmonic orders appear with amplitudes of 0.3%, 1.6%, and 1.5%, respectively.
- B.
Active-Power-Filter Application Case
The closed-loop control scheme shown in
Figure 5 is used for APF applications. In this case, the harmonic current term in Equation (2) will be included to be compensated by the proposed MLI. The PV module parameters are shown in
Table 2, while the system parameters are seen in
Table 3. As discussed in the previous section, the proposed control scheme can be used for APFs only or it is able to work as an APF and integrate the PVs into the grid at the same time. These two scenarios are investigated.
Scenario 1: The control scheme is able to work as an APF only:
In this scenario, the grid is responsible for supplying the balanced three-phase currents to the nonlinear load, and the proposed MLI is controlled to only compensate for the harmonic currents of the load. The values of the nonlinear load parameters were (
,
). To allow the grid to supply the active power to the load, the duty cycle of the DC–DC converter was kept constant at 0.3 (no MPPT was used). The DC-link voltages were regulated to 40 V.
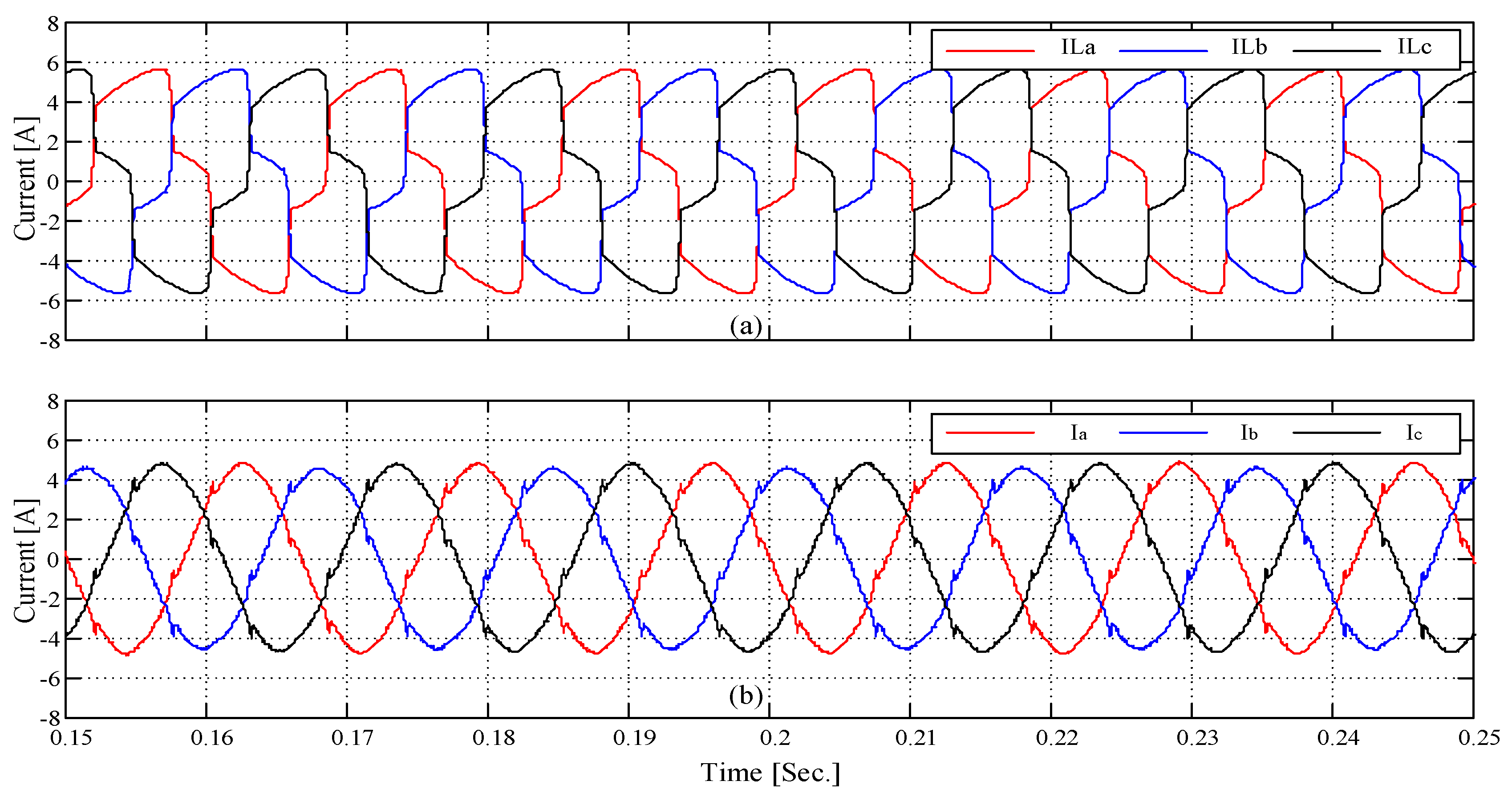
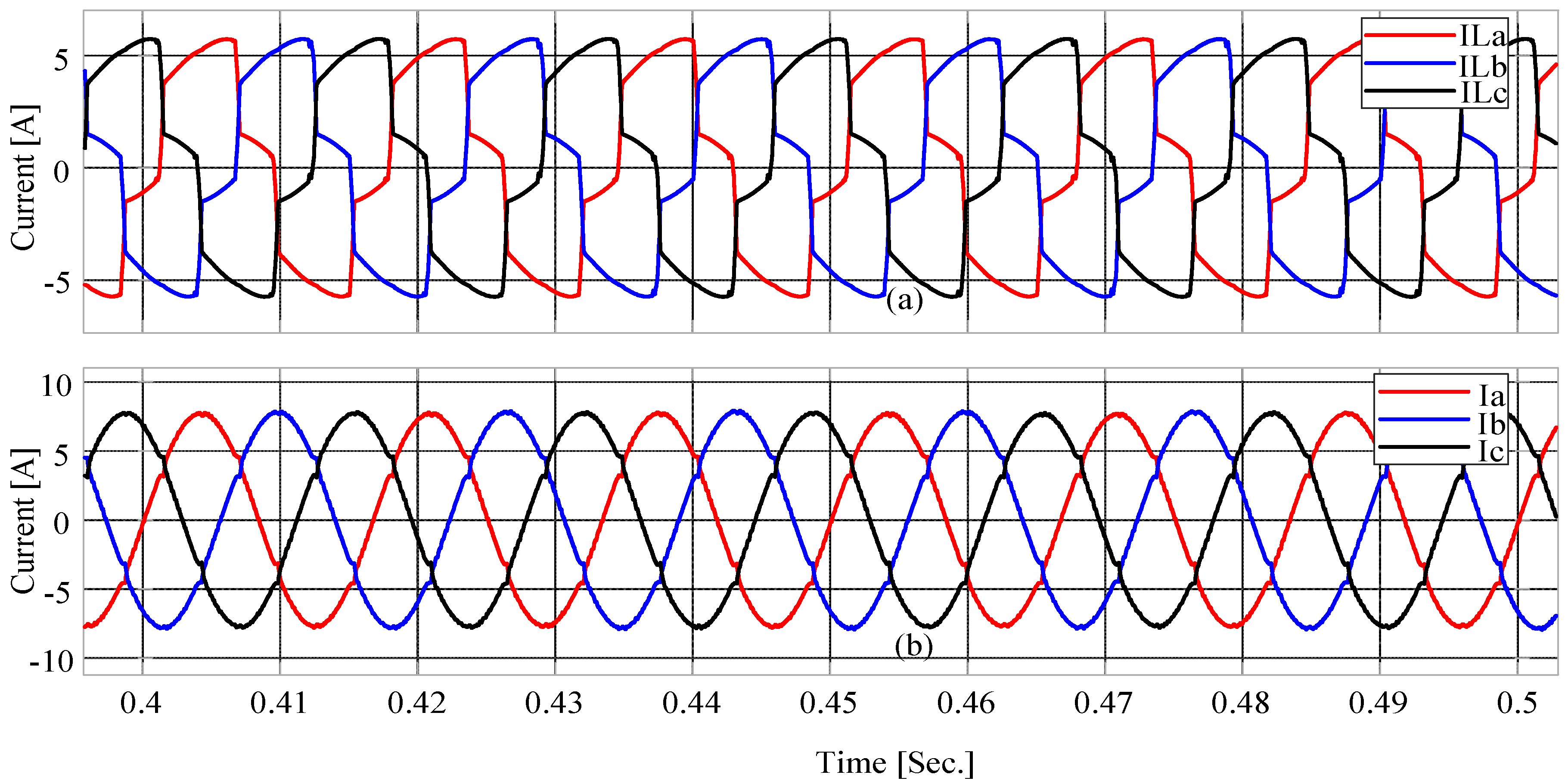
Table 3 presents the system parameters that were considered during the simulation. The nonlinear load currents can be seen in
Figure 10a, while the three-phase low harmonized grid currents can be seen in
Figure 10b. It should be noted that the grid current flowed from the grid to the nonlinear load. As revealed in
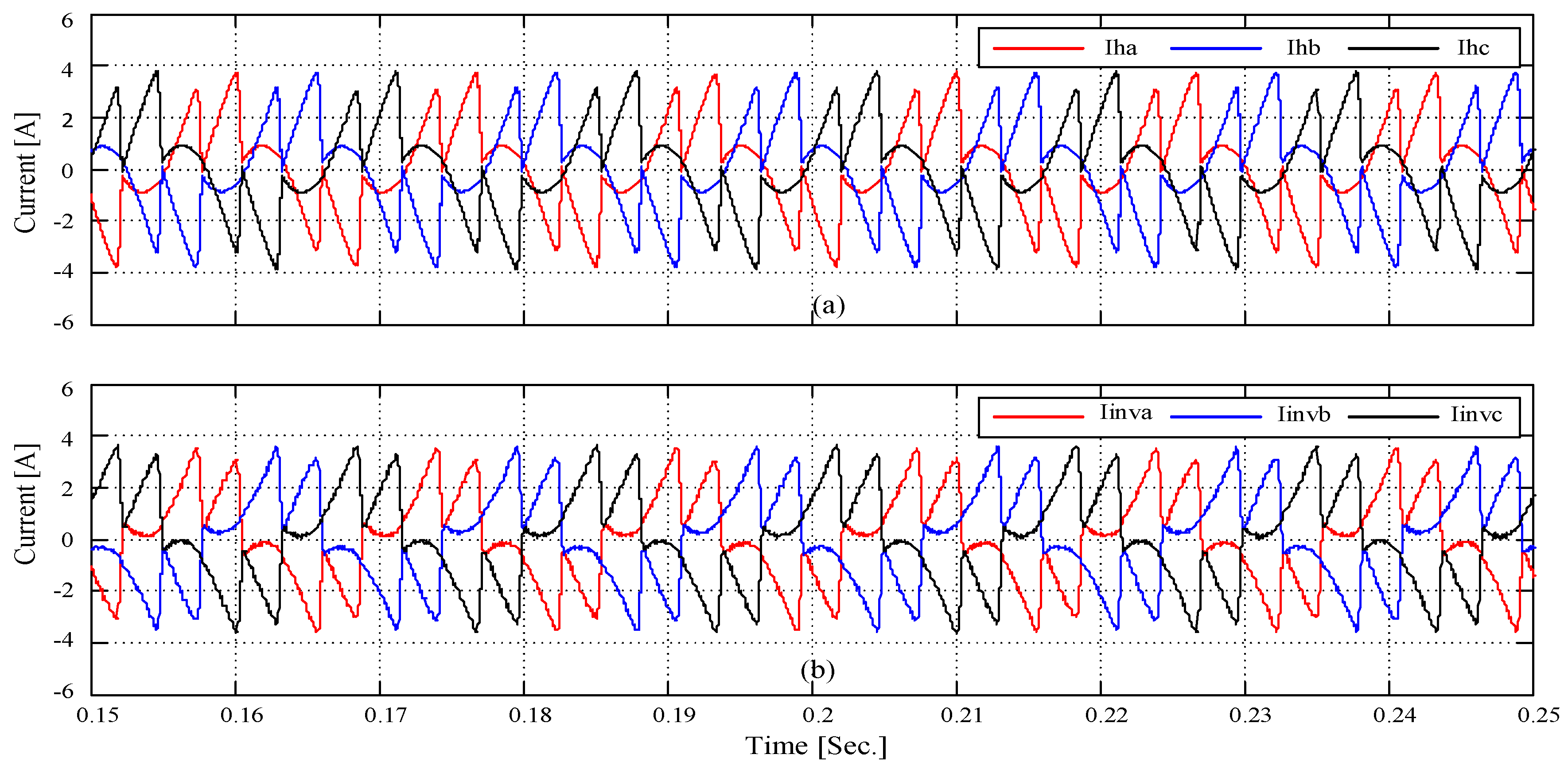
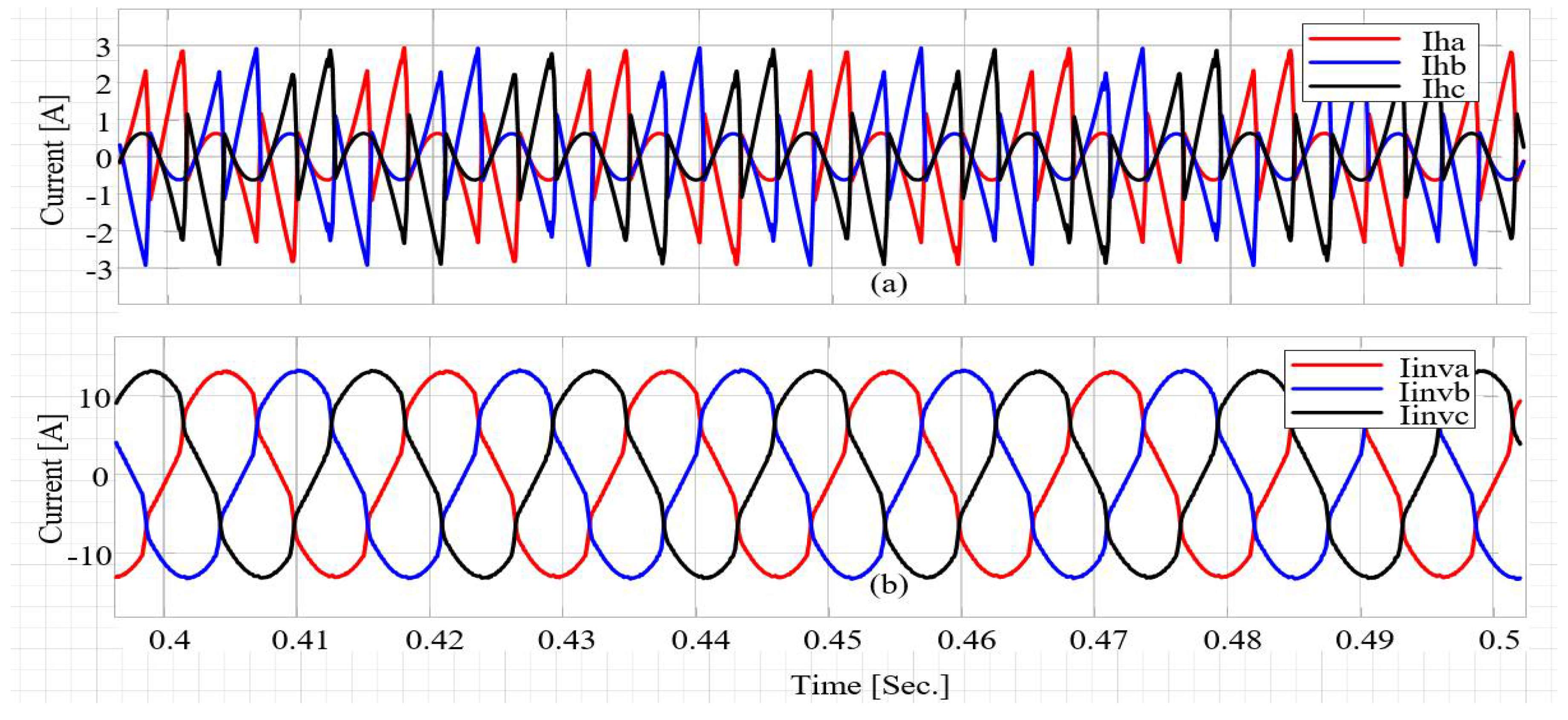
Figure 10b, the grid currents were balanced, and the nonlinear load did not affect the grid currents. On the other hand, the harmonic currents extracted from the nonlinear load currents can be seen in
Figure 11a. These currents were the reference currents of the proposed MLI. As revealed in
Figure 11b, the MLI currents followed the extracted harmonic currents of the nonlinear load.
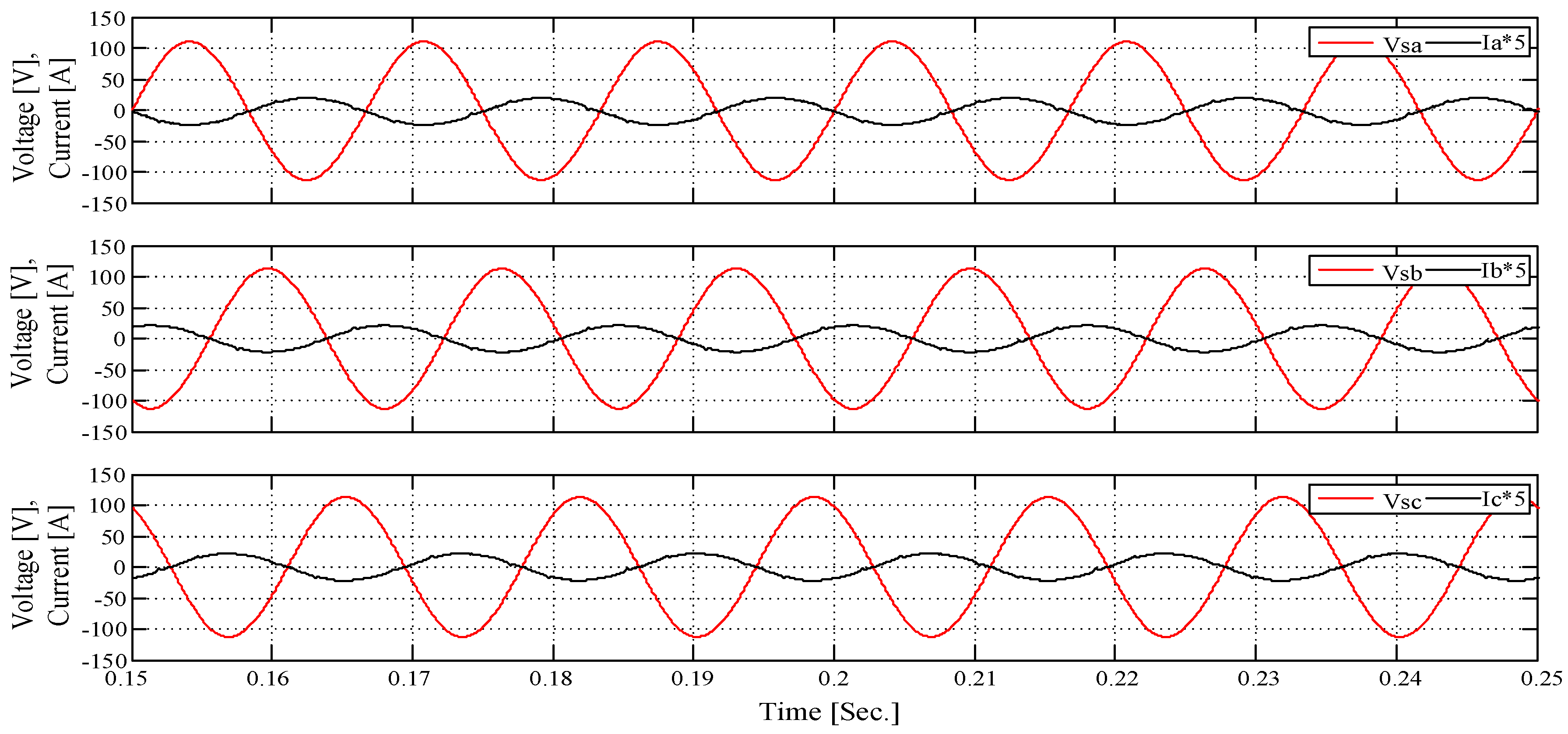
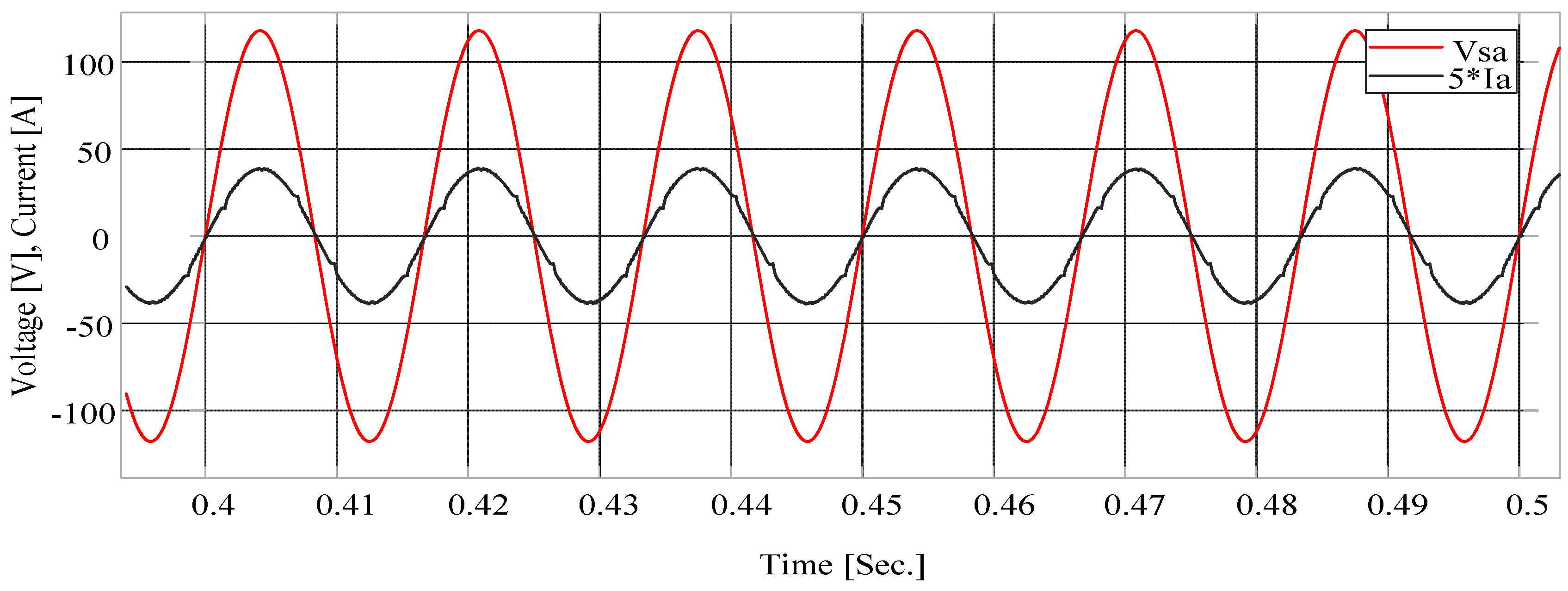
Figure 12 shows that the control scheme was successful in maintaining the power-factor unity. The grid currents are shown out of phase with the grid voltages because the grid current direction was from the grid to the load.
Scenario 2: The control scheme is able to work as an APF and integrate the PVs into the grid at the same time.
In this scenario, 24 PV modules were used to guarantee that the inverter supplies the nonlinear load currents and at the same time inject currents into the grid. Twelve PV modules were connected to the upper part of the proposed MLI such that two parallel PV modules were connected to each H-bridge cell. On the other hand, the other 12 PV modules were connected to the lower part of the MLI such that four parallel PV modules were connected to each VSI unit. The proposed control scheme will generate the reference inverter currents that equal the grid current and the nonlinear load currents. The MLI will supply the distorted nonlinear load currents and at the same time will inject currents into the grid with low distortion.
Figure 13a shows the extracted harmonic currents of the nonlinear load. In addition, the actual MLI currents are seen in
Figure 13b. As can be seen, the inverter currents were not a mirror to the load harmonic load current. The inverter currents contained the nonlinear load currents and the injected currents to the grid. Moreover,
Figure 14a shows the nonlinear load currents while
Figure 14b shows the grid currents.
As can be seen, the proposed control scheme succeeded in keeping the grid current in phase with the grid voltage, so that the power factor was kept unity, as seen in
Figure 15.
4. Experimental Results
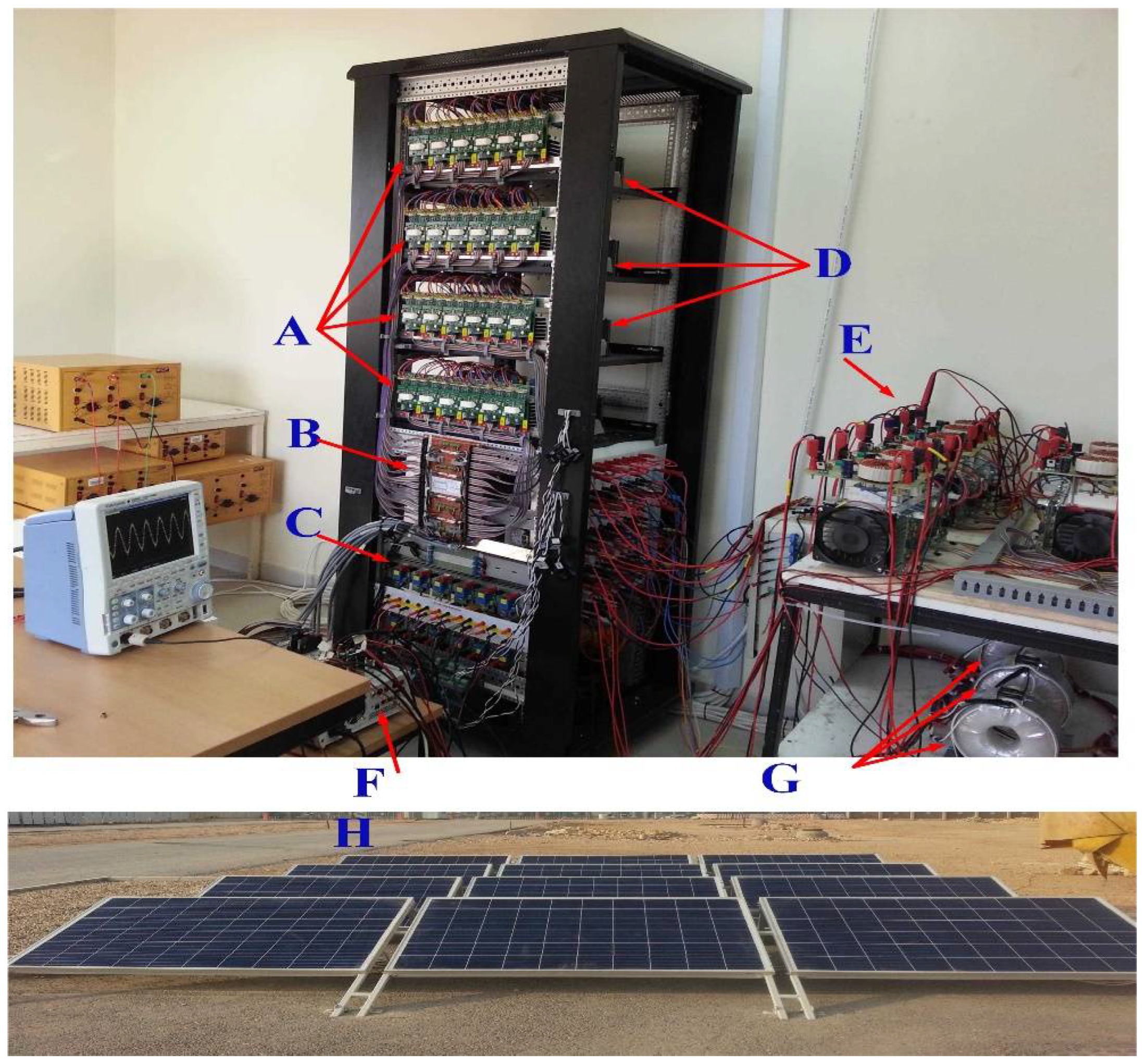
The proposed MLI was built in the lab and tested for PV–grid connections as well as for APF applications. The hardware setup of the proposed MLI is seen in
Figure 16. The PV module parameters are seen in
Table 2. The closed-loop control scheme explained in
Section 3 was used to perform the closed-loop control of the proposed system. The PWM pulses that were generated were transferred to the IGBTs through the use of a DS1202 board. Two cases were performed, PV-grid connections and APF applications, as seen in the simulation section. The same two cases were experimentally implemented.
- A.
Grid-Connected PV Application Case
A 4.2 mH interface inductor was used to establish the connection between the proposed topology and the grid during experimental testing. The parameters used for the experiment can be seen in
Table 1. The entire closed-loop control scheme depicted in
Figure 3 and
Figure 4 was used to execute the constructed inverter. In this case, the nonlinear load was disconnected from the constructed inverter; therefore, the harmonic current extraction term from (2) was zero. In addition, the reactive current reference of the constructed inverter was set to zero to guarantee unity-power factor. The proposed topology was used only to connect the PV modules to the grid. Twelve PV modules were used in the experimental setup; six of them are connected to the upper part such that one PV module was assigned for each H-bridge cell and the other six PV modules were connected to the lower part such that two parallel PV modules were assigned to each VSI unit. The P&O MPPT algorithm was used to track the maximum power of the PV modules by using a DC–DC Ćuk converter.
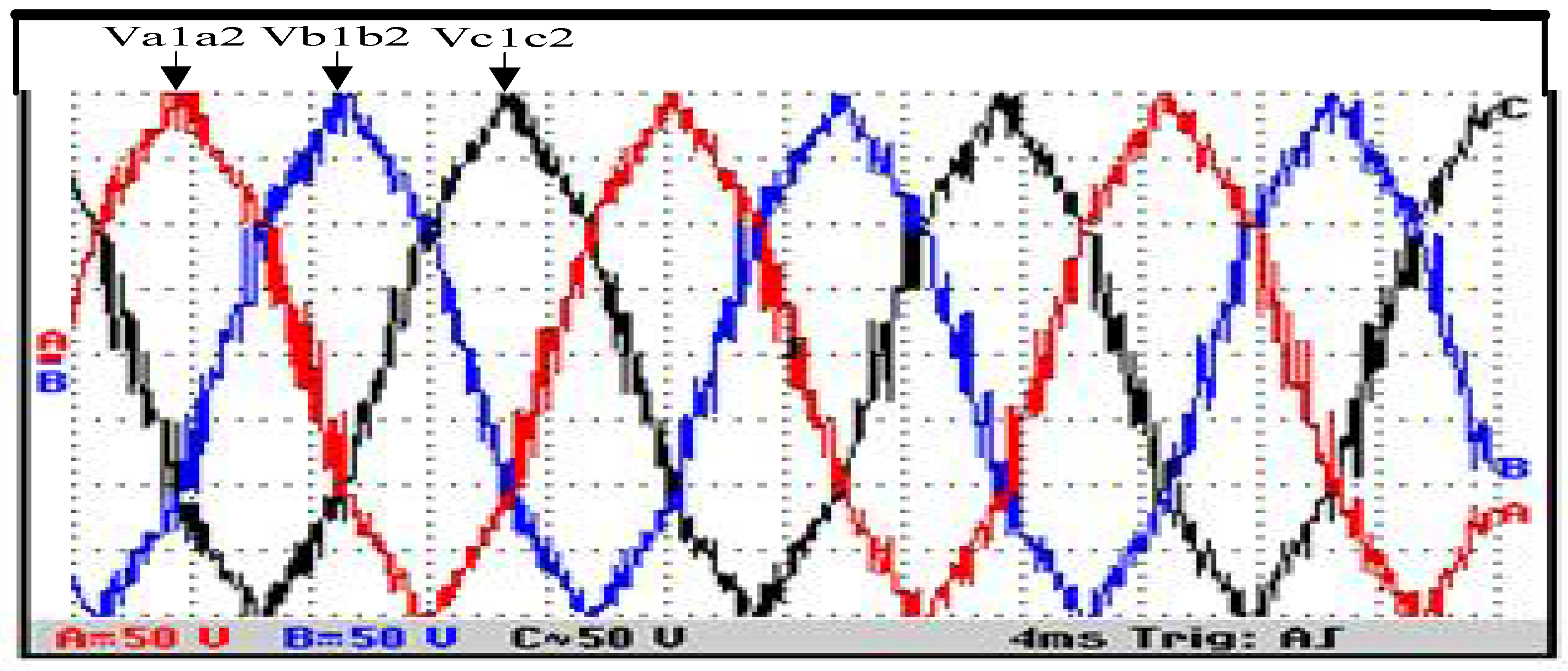
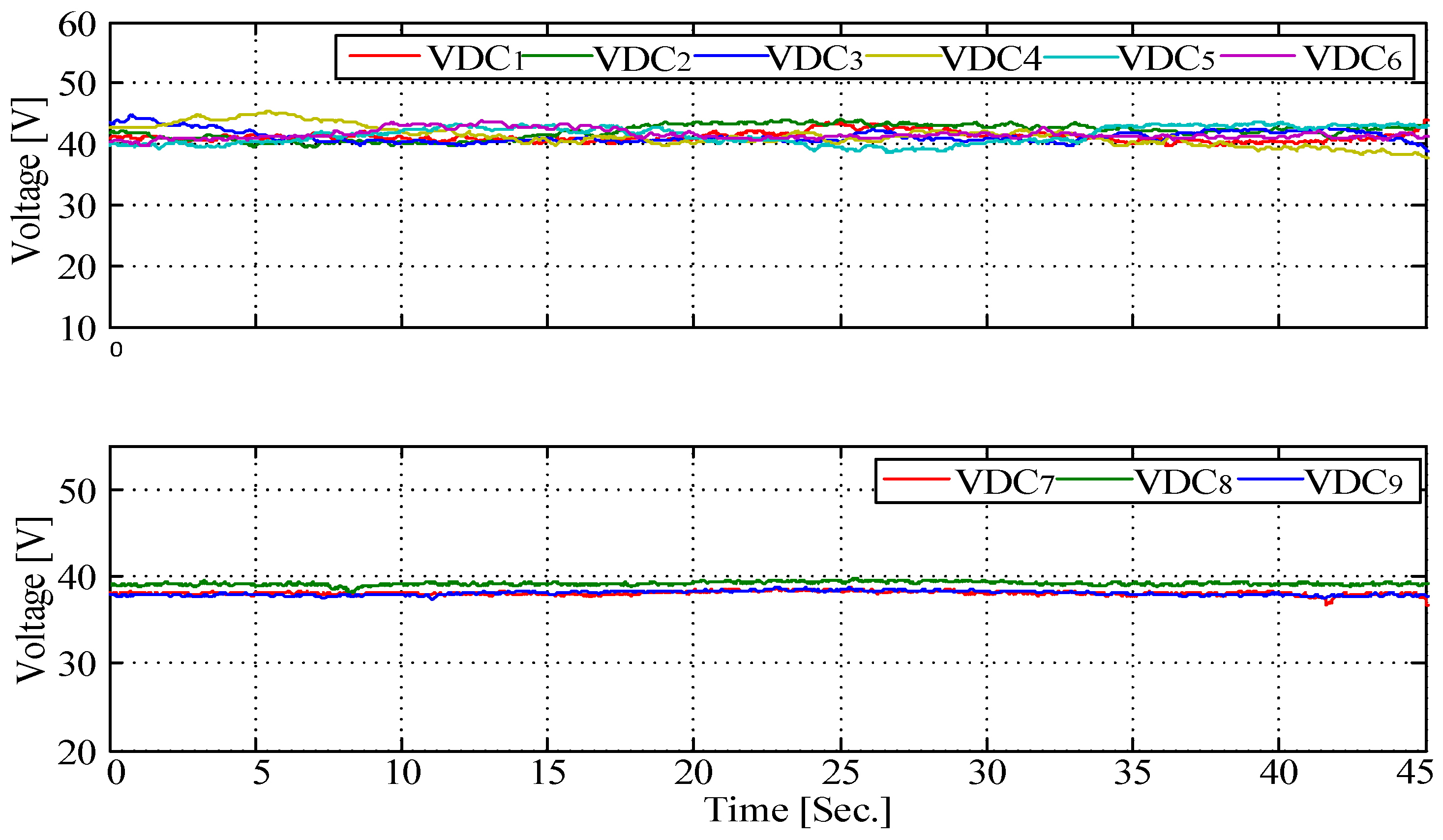
Figure 17 shows the experimental DC-link voltages of the proposed topology. This figure demonstrates that the control scheme was successful in maintaining the DC-link voltages at the reference voltages. On the other hand, the three-phase grid voltages were measured using voltage sensor model LV 25-P to be used for the phase-locked loop. A snapshot of the generated voltages (
,
,
across the primary windings of the
,
, and
transformers) measured via an oscilloscope is shown in
Figure 18.
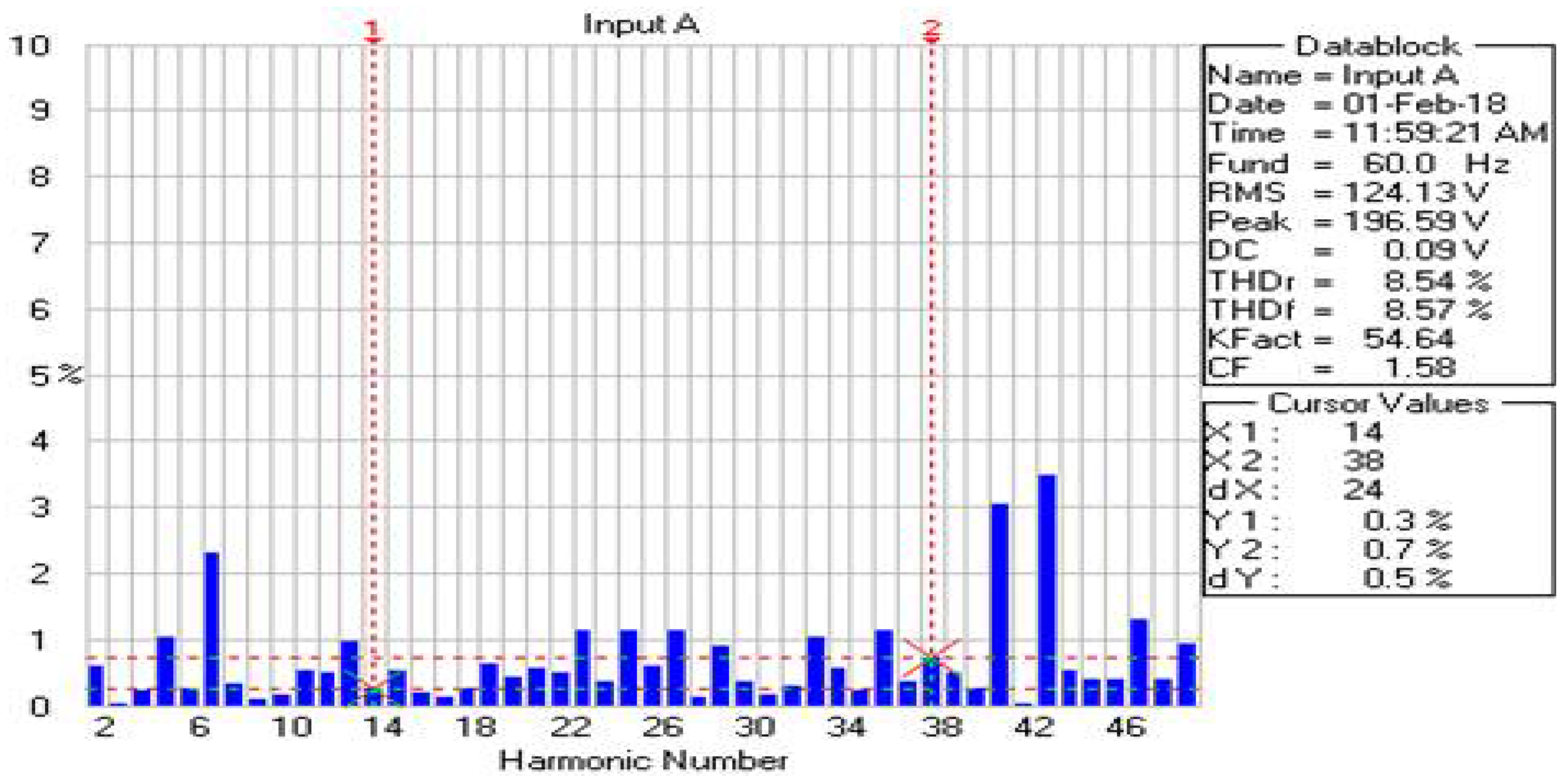
Figure 19 reveals the harmonic spectrum of the generated voltage
. As displayed in this figure, the THD was 8.57%.
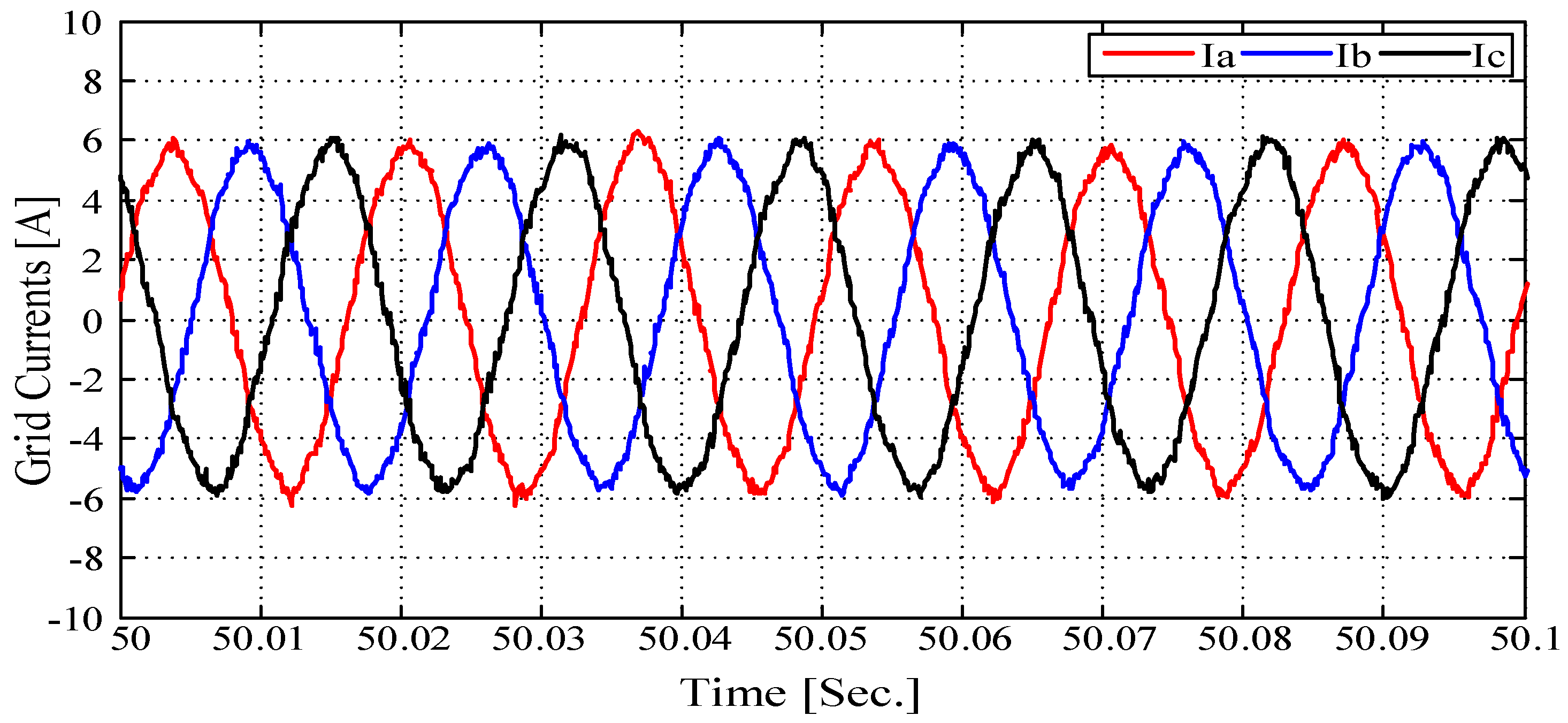
Figure 20 shows the grid currents measured by the Hall-effect current sensor model LTS 25-NP.
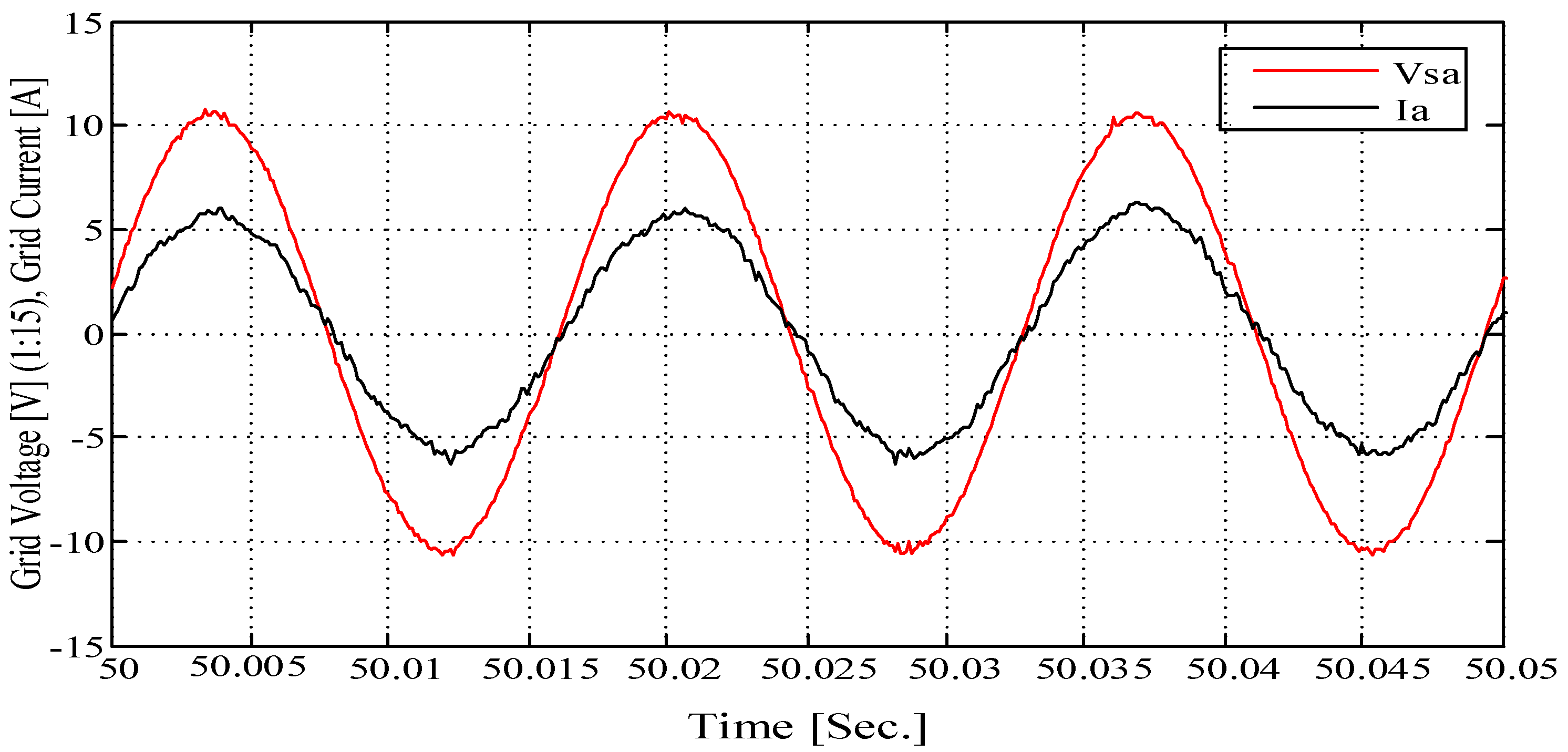
The proposed control scheme succeeded in keeping the grid currents in phase with the grid voltages so that the power factor was unified, as demonstrated in
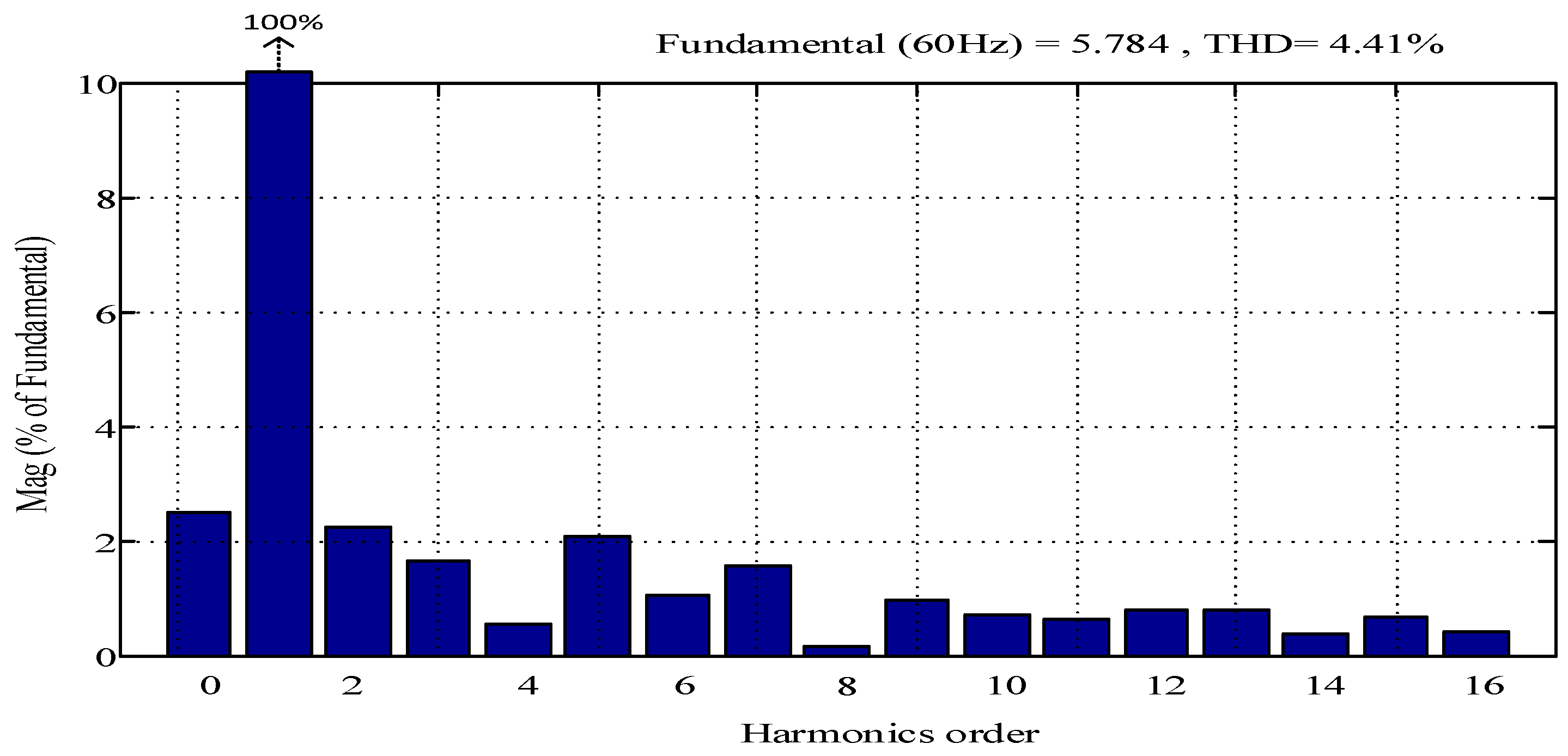
Figure 21. From another point of view, the THD of the grid current,
, was 4.41%, which is within the IEEE-519 standard limit. The harmonic spectrum of the grid current in the proposed MLI can be seen in
Figure 22.
- B.
APF-Application Case
In this case, the constructed inverter was experimentally used for APF application. That is, the control scheme was able to work as an APF only. The parameters used for the experiment can be seen in
Table 3. In addition, the harmonic current term in Equation (2) was be included so as to be compensated by the MLI. The resulting PWM pulses were then sent to the IGBTs via the DS1202 board. The constructed MLI was controlled to only compensate the harmonic contents of the load currents, while the grid supplied the three-phase positive-sequence currents of the nonlinear load.
The values of the nonlinear load parameters were
,
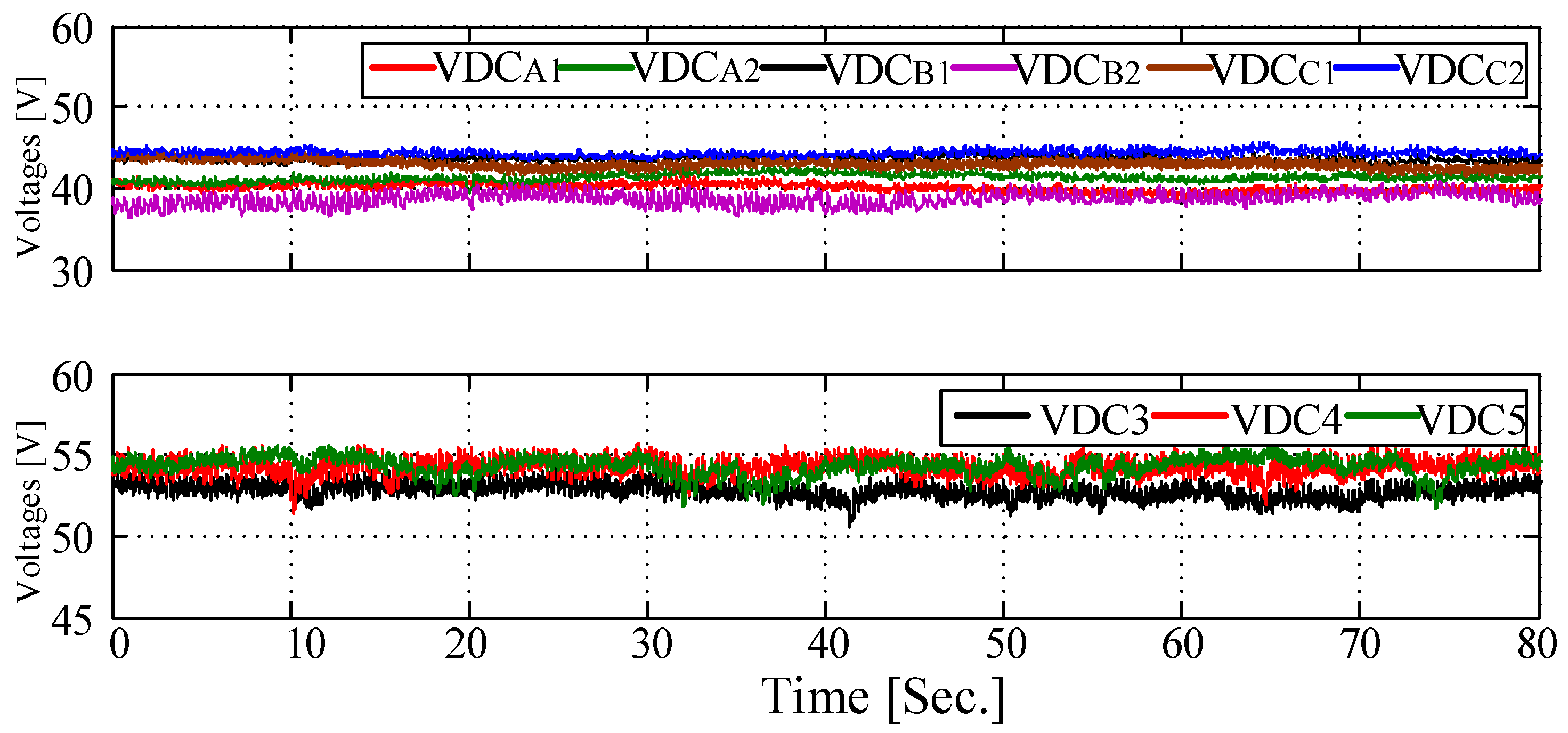
. To allow the grid to feed power to the nonlinear load, the duty cycle of the DC-DC converter was kept constant at 0.3 (no MPPT is used). The DC-link controllers were successful in maintaining the DC-link voltages at reference levels, as seen in
Figure 23. These voltages were measured via analog-to-digital converters by using voltage sensors and plotted in the control desk of the MicroLabBox.
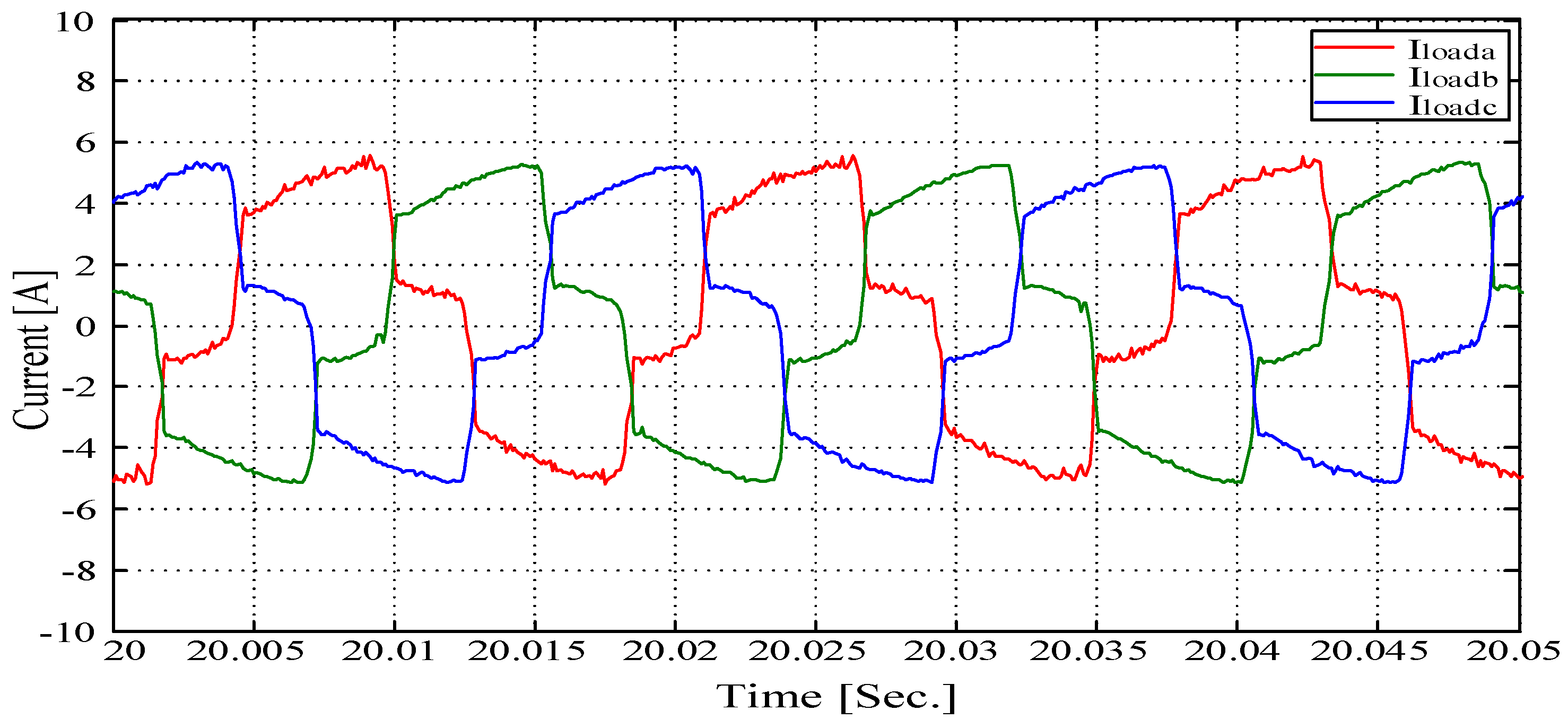
On the other hand,
Figure 24 shows the experimental load currents measured by using Hall-effect current sensors. As seen in
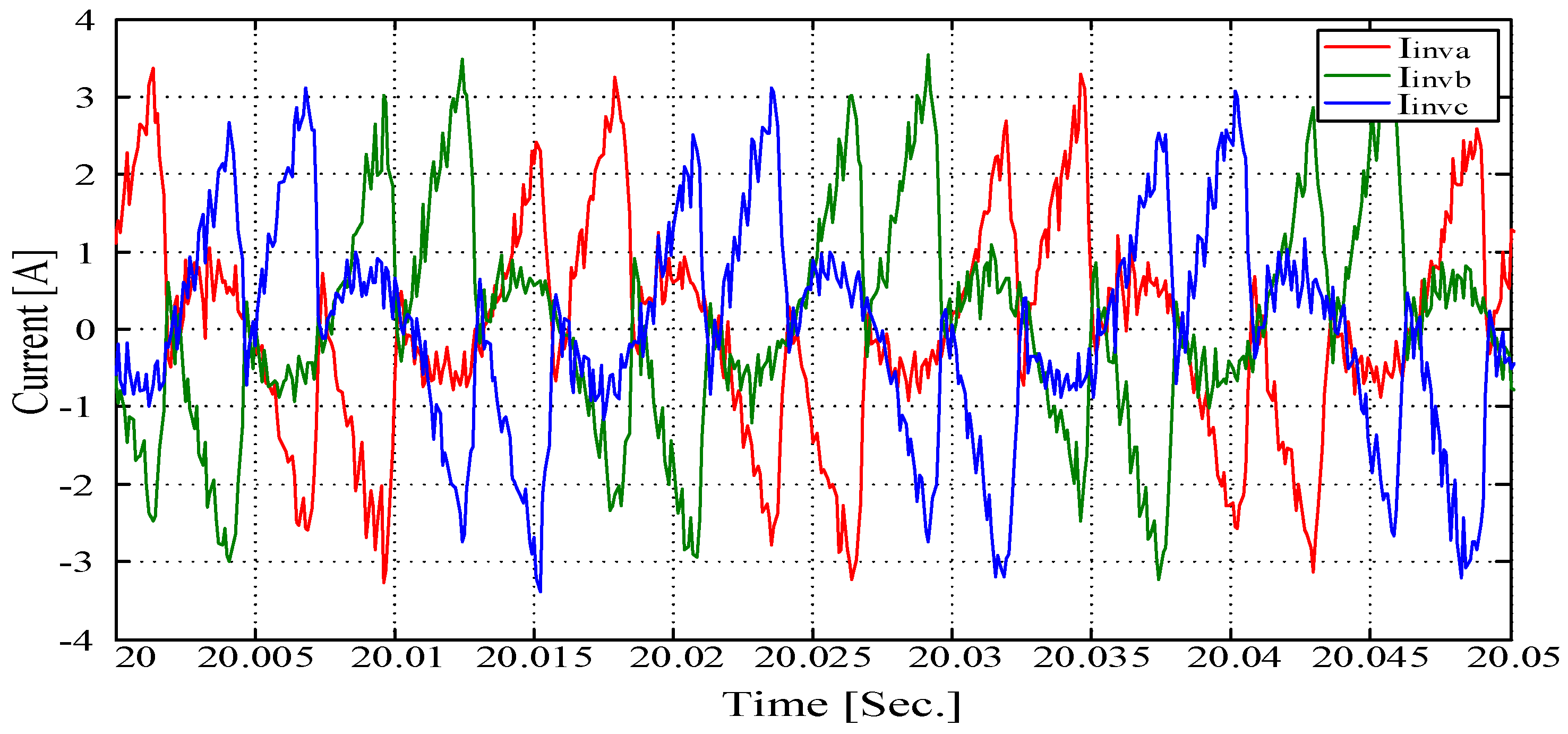
Figure 24, the load currents are not sine waves since they are highly distorted due to the nonlinear loads. As explained in the control scheme, the harmonic currents of the load were extracted from the load current so as to be compensated by the inverter. The experimental extracted harmonic load currents (the experimental currents of APF) are shown in
Figure 25.
These harmonic currents were then used as a reference for the inverter currents so that the inverter compensated only these load current harmonics, and the grid supplied the nonharmonic currents. The experimental three-phase grid currents are shown in
Figure 26.
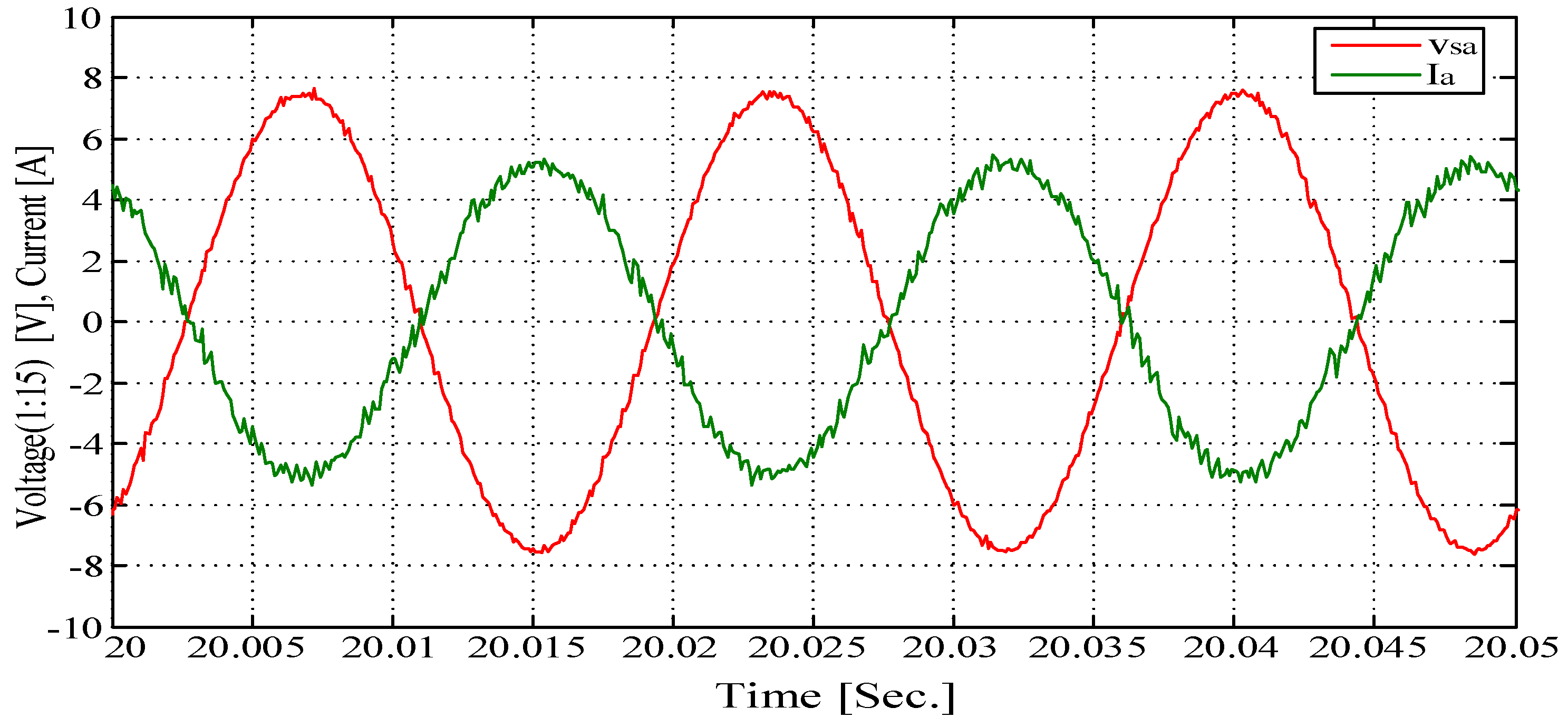
The line currents and the grid voltages were out of phase, as revealed in
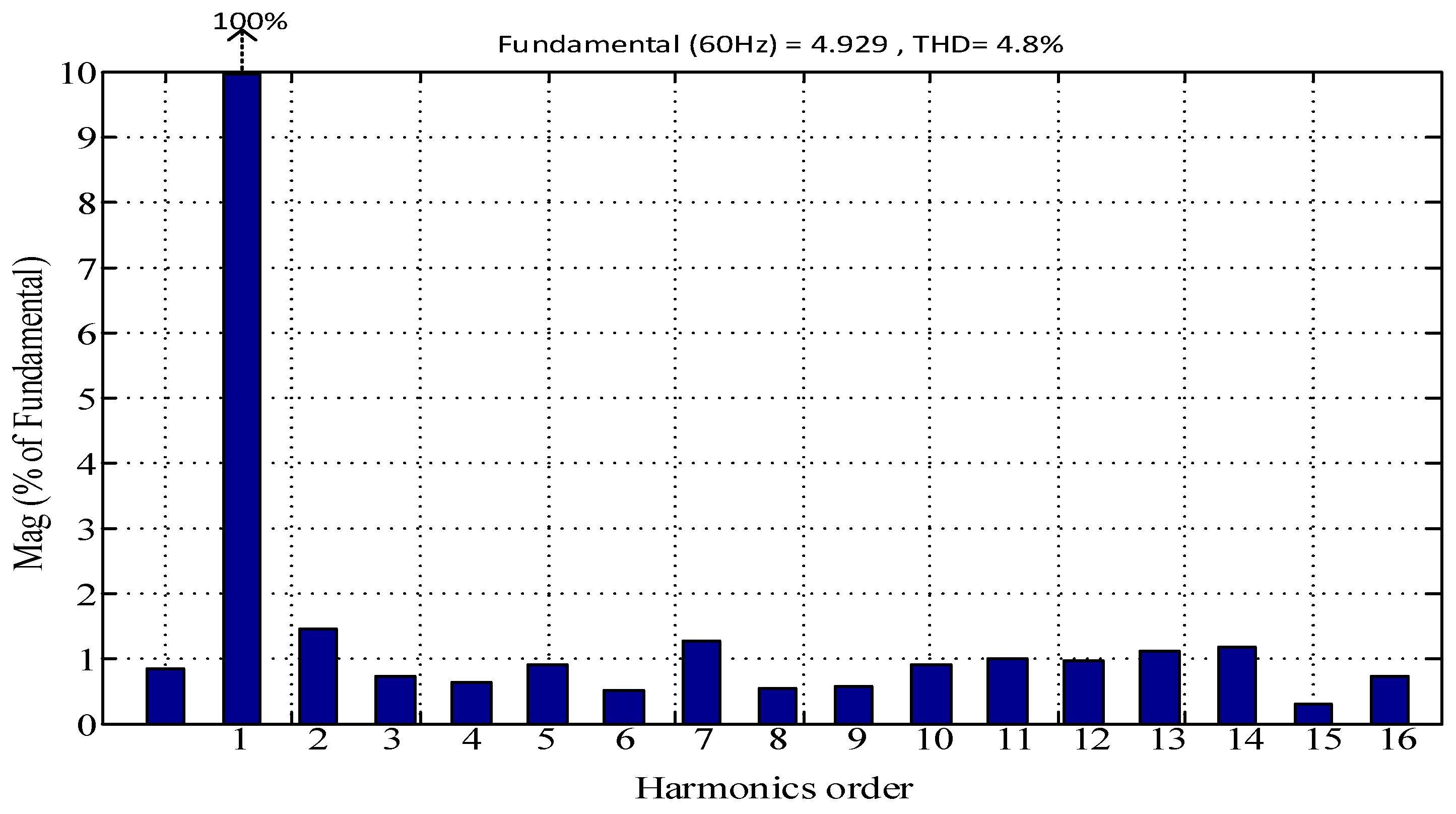
Figure 27, so that the power factor was kept unified. The out-of-phase grid currents were due to the current sensors measuring the current from the grid to the load. On the other hand, the THD of the line currents was 4.8%, which had acceptable harmonic content of less than 5%, as defined by the IEEE-519 standard. The harmonic spectrum of the grid current,
, is shown in
Figure 28.



































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}