
Predictive Emission Management Based on Pre-Heating for Heavy-Duty Powertrains



Abstract
:1. Introduction
2. Modeling
2.1. Engine Model
2.1.1. Engine Modes
2.1.2. Turbine Thermal Inertia
2.2. Aftertreatment System Model
- Engine down pipe (EDP);
- Diesel oxidation catalyst (DOC);
- Diesel particulate filter (DPF);
- Urea decomposition pipe (UDP);
- SCR catalyst (SCR);
- Ammonia slip catalyst (ASC).
2.2.1. DOC and DPF
2.2.2. SCR Catalyst
2.2.3. Ammonia Dosing Controller
2.3. Simulation Setup
2.4. Validation
3. Emission Management Strategy
3.1. Causal Emission Management Strategy
3.2. Equivalence Factor
3.2.1. Normalized Units
3.2.2. Interpreting the Equivalence Factor
3.3. Event Localization
3.4. Event Optimization
4. Results
4.1. Single Event
4.1.1. Example Simulations
4.1.2. Comparison with Baseline Strategy
4.2. Optimality of the Distribution of Fuel between Events
4.3. Drayage Cycle
4.4. Calculation Time
5. Conclusions
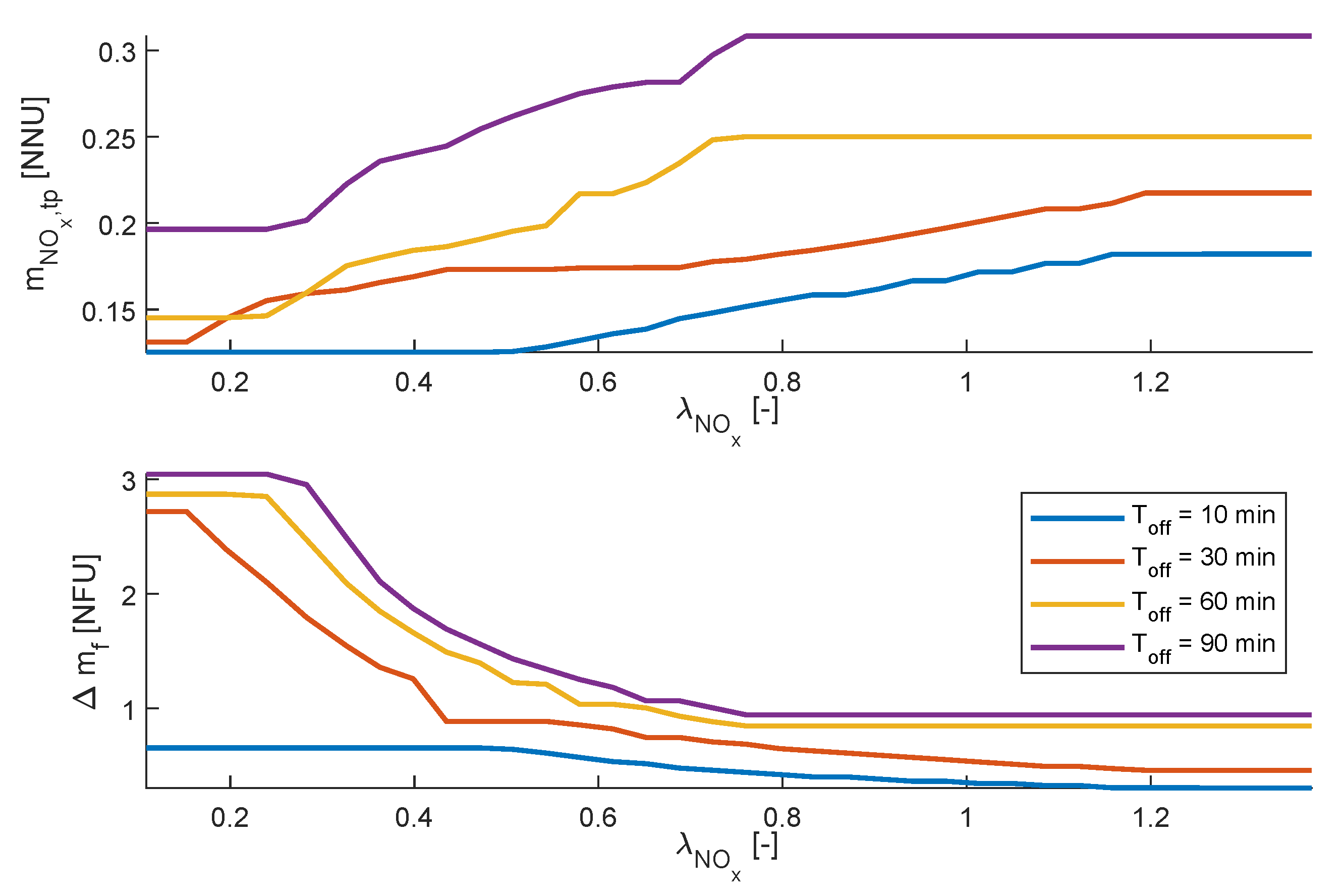
- For engine-off periods of 10–30 min a reduction in of 10–20% compared to the baseline strategy, using the same amount of fuel, is observed.
- When twice as much fuel is allowed compared to the baseline strategy, a reduction of around 30% is achieved for off-times up to 1.5 h. After 1.5 h the efficiency of the pre-heating goes down exponentially and after 4 h it is around 5%.
- The proposed strategy can handle scenarios with multiple engine-off and significantly reduce the .
- Using the same amount of fuel as the baseline strategy, the is reduced by 4%
- The same amount of as the baseline is achieved using 8% less extra fuel, corresponding to a reduction in total fuel consumption of 0.1%.
- The reduction in is shown to be fairly linear in the equivalence factor, which gives the strategy a predictable behavior.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DOC [20,21,22] | |
|---|---|
| Oxidation and redox of NO/NO2 | |
| DPF [21,23,24] | |
| Oxidation and redox of NO/NO2 | |
| SCR [20,21,22,25,26] | |
| Ammonia adsorption and desorption | |
| Standard SCR | |
| Fast SCR | |
| Slow SCR | |
| Ammonia oxidation | |
| hydrolysis | |
| ASC [21,27,28] | |
| adsorption and desorption | |
| adsorption and desorption | |
| adsorption and desorption | |
| formation | |
| Standard SCR | |
| formation | |
| Direct SCO/ activation |
References
- Sciarretta, A.; Guzzella, L. Control of hybrid electric vehicles. IEEE Control. Syst. Mag. 2007, 27, 60–70. [Google Scholar]
- Brahma, A.; Guezennec, Y.; Rizzoni, G. Optimal energy management in series hybrid electric vehicles. In Proceedings of the 2000 American Control Conference, Chicago, IL, USA, 28–30 June 2000; IEEE: Piscataway, NJ, USA, 2000; Volume 1. [Google Scholar]
- Paganelli, G.; Guerra, T.; Delprat, S.; Santin, J.; Delhom, M.; Combes, E. Simulation and assessment of power control strategies for a parallel hybrid car. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2000, 214, 705–717. [Google Scholar]
- Huang, Y.; Wang, H.; Khajepour, A.; He, H.; Ji, J. Model predictive control power management strategies for HEVs: A review. J. Power Sources 2017, 341, 91–106. [Google Scholar] [CrossRef]
- Feng, R.; Chen, K.; Sun, Z.; Hu, X.; Li, G.; Wang, S.; Deng, B.; Sun, W. A comparative study on the energy flow of a hybrid heavy truck between AMT and MT shift mode under local driving test cycle. Energy Convers. Manag. 2022, 256, 115359. [Google Scholar] [CrossRef]
- Ritzmann, J.; Lins, G.; Onder, C. Optimization Method for the Energy and Emissions Management of a Hybrid Electric Vehicle with an Exhaust Aftertreatment System. IFAC-PapersOnLine 2020, 53, 13797–13804. [Google Scholar] [CrossRef]
- Kessels, J.; Willems, F.; Schoot, W.; Van Den Bosch, P. Integrated energy & emission management for hybrid electric truck with SCR aftertreatment. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference, Lille, France, 1–3 September 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 1–6. [Google Scholar]
- Kuchly, J.; Nelson-Gruel, D.; Charlet, A.; Chamaillard, Y.; Nouillant, C. Projected Gradient and Model Predictive Control: Optimal Energy and Pollutants Management for Hybrid Electric Vehicle. IFAC-PapersOnLine 2019, 52, 121–127. [Google Scholar] [CrossRef]
- Zhao, J.; Wang, J. Model predictive control of integrated hybrid electric powertrains coupled with aftertreatment systems. In Proceedings of the Dynamic Systems and Control Conference, San Antonio, TX, USA, 22–24 October 2014; American Society of Mechanical Engineers: New York, NY, USA, 2014; Volume 46193, p. V002T36A004. [Google Scholar]
- Biswas, D.; Ghosh, S.; Sengupta, S.; Mukhopadhyay, S. A Predictive Supervisory Controller for an HEV Operating in a Zero Emission Zone. In Proceedings of the 2019 IEEE Transportation Electrification Conference and Expo (ITEC), Novi, MI, USA, 21 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Soldo, J.; Skugor, B.; Deur, J. Optimal Energy Management Control of a Parallel Plug-In Hybrid Electric Vehicle in the Presence of Low Emission Zones; SAE Technical Paper 2019-01-1215; SAE: Warrendale, PA, USA, 2019. [Google Scholar]
- Kum, D.; Peng, H.; Bucknor, N.K. Supervisory control of parallel hybrid electric vehicles for fuel and emission reduction. J. Dyn. Syst. Meas. Control 2011, 133, 061010. [Google Scholar] [CrossRef]
- Willems, F.; Spronkmans, S.; Kessels, J. Integrated powertrain control to meet low CO2 emissions for a hybrid distribution truck with SCR-DeNOx system. In Proceedings of the ASME 2011 Dynamic Systems and Control Conference and Bath/ASME Symposium on Fluid Power and Motion Control, American Society of Mechanical Engineers Digital Collection, Arlington, VA, USA, 31 October–2 November 2011; pp. 907–912. [Google Scholar]
- Holmer, O.; Willems, F.; Blomgren, F.; Eriksson, L. Optimal aftertreatment pre-heat strategy for minimum tailpipe NOx around green zones. In Proceedings of the 2020 WCX SAE World Congress Experience, Detroit, MI, USA, 21–23 April 2020; SAE International: Warrendale, PA, USA, 2020. [Google Scholar]
- Holmer, O.; Eriksson, L. Modeling and Simulation of a Heavy-Duty Hybrid Electric Powertrain. 2022; Unpublished manuscript. [Google Scholar]
- Holmer, O.; Eriksson, L. Selective Catalytic Reduction Catalyst Modeling for Control Purposes. Energies 2022, 15, 8182. [Google Scholar] [CrossRef]
- Holmer, O.; Eriksson, L. A Simplified Diesel Particulate Filter Model. Technical Report. 2022; Unpublished manuscript. [Google Scholar]
- Holmer, O.; Blomgren, F.; Eriksson, L. Modeling of Engine Aftertreatment System Cooling for Hybrid Vehicles; SAE Technical Paper 2019-01-0989; SAE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Amar, P.; Desai, P.; Kailas, A.; Gallo, J.B. Development of a Duty Cycle for the Design and Optimization of Advanced, Heavy-Duty Port Drayage Trucks. Transp. Res. Rec. 2017, 2609, 19–27. [Google Scholar] [CrossRef]
- Chatterjee, D.; Burkhardt, T.; Rappe, T.; Güthenke, A.; Weibel, M. Numerical simulation of DOC+ DPF+ SCR systems: DOC influence on SCR performance. SAE Int. J. Fuels Lubr. 2008, 1, 440–451. [Google Scholar] [CrossRef]
- Cloudt, R.; Saenen, J.; van den Eijnden, E.; Rojer, C. Virtual Exhaust Line for Model-Based Diesel Aftertreatment Development; SAE Technical Paper 2010-01-0888; SAE: Piscataway, NJ, USA, 2010. [Google Scholar]
- Koebel, M.; Elsener, M.; Kleemann, M. Urea-SCR: A promising technique to reduce NOx emissions from automotive diesel engines. Catal. Today 2000, 59, 335–345. [Google Scholar] [CrossRef]
- Konstandopoulos, A.G.; Kostoglou, M.; Skaperdas, E.; Papaioannou, E.; Zarvalis, D.; Kladopoulou, E. Fundamental Studies of Diesel Particulate Filters: Transient Loading, Regeneration and Aging; SAE Technical Paper 2000-01-1016; SAE: Piscataway, NJ, USA, 2000. [Google Scholar]
- Kandylas, I.P.; Haralampous, O.A.; Koltsakis, G.C. Diesel soot oxidation with NO2: Engine experiments and simulations. Ind. Eng. Chem. Res. 2002, 41, 5372–5384. [Google Scholar] [CrossRef]
- van den Eijnden, E.; Cloudt, R.; Willems, F.; van der Heijden, P. Automated Model Fit Tool for SCR Control and OBD Development; SAE: Piscataway, NJ, USA, 2009. [Google Scholar]
- Winkler, C.; Flörchinger, P.; Patil, M.; Gieshoff, J.; Spurk, P.; Pfeifer, M. Modeling of SCR-DeNOx Catalyst-Looking at the Impact of Substrate Attributes; SAE Technical Paper 2003-01-0845; SAE: Piscataway, NJ, USA, 2003. [Google Scholar]
- Scheuer, A.; Votsmeier, M.; Schuler, A.; Gieshoff, J.; Drochner, A.; Vogel, H. NH3-slip catalysts: Experiments versus mechanistic modelling. Top. Catal. 2009, 52, 1847. [Google Scholar] [CrossRef]
- Kraehnert, R.; Baerns, M. Kinetics of ammonia oxidation over Pt foil studied in a micro-structured quartz-reactor. Chem. Eng. J. 2008, 137, 361–375. [Google Scholar] [CrossRef] [Green Version]














| Extra Fuel | Tailpipe Mass | ||||
|---|---|---|---|---|---|
| Absolute (NFU) | Relative to Baseline | Relative to | Absolute (NNU) | Relative to Baseline | |
| 0.6365 | 3.8 | 92% | 1.2% | 1.53 | 100% |
| 0.587 | 4.1 | 100% | 1.3% | 1.46 | 96% |
| 0.265 | 8.2 | 200% | 2.6% | 0.99 | 65% |
| 0.141 | 12.3 | 300% | 4.1% | 0.7 | 47% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Holmer, O.; Eriksson, L. Predictive Emission Management Based on Pre-Heating for Heavy-Duty Powertrains. Energies 2022, 15, 8232. https://doi.org/10.3390/en15218232
Holmer O, Eriksson L. Predictive Emission Management Based on Pre-Heating for Heavy-Duty Powertrains. Energies. 2022; 15(21):8232. https://doi.org/10.3390/en15218232
Chicago/Turabian StyleHolmer, Olov, and Lars Eriksson. 2022. "Predictive Emission Management Based on Pre-Heating for Heavy-Duty Powertrains" Energies 15, no. 21: 8232. https://doi.org/10.3390/en15218232
APA StyleHolmer, O., & Eriksson, L. (2022). Predictive Emission Management Based on Pre-Heating for Heavy-Duty Powertrains. Energies, 15(21), 8232. https://doi.org/10.3390/en15218232