1. Introduction
The development of renewable energy systems has been receiving a lot of attention due to the crisis caused by climate change and the resultant carbon neutrality. The wind power generation system plays an essential role in carbon neutrality because it has a low carbon emission feature during the power generation process. Additionally, the generation cost of wind power is relatively low, and large-scale wind power systems are efficient with regard to central control. However, the constantly changing wind speed in the supply side causes irregular power supply problems for the surrounding grid system. Furthermore, wind power irregularity affects harmonic components, resulting in power quality deterioration and power equipment damages [
1,
2]. This problem can be solved by stabilizing the imbalance between power supply and power demand through curtailments, which forcibly limit the power generated by wind turbines. Thus, lately there have been many studies on the active power control of wind farms [
3,
4,
5].
In general, in the case of wind farm curtailments, control is performed by starting and stopping wind generators. The frequent process of starting and stopping wind farms has a significant impact on the quality of electrical systems. Regarding the frequent start and stop problems of wind turbines, the authors of [
6] suggested new measures for improving the power consumption structure and grid side. In [
7,
8], an active power control strategy was proposed based on real-time wind speed information and the dynamic classification of operating conditions. This control strategy can reduce the total number of wind turbine stops because it considers the frequent stop times and performs control. However, since the dynamic classification criterion is a comprehensive approach, it is difficult to precisely control the active power of individual wind turbines. In addition, an active power allocation strategy based on a proportional algorithm is proposed in [
9,
10,
11], and it adopts a control strategy that allocates active power proportions to a wind capacity to reduce the allocation errors. The authors of [
12] presented a control strategy for the equitable distribution of the active power scheduling commands in wind farms. The advantage of the average distribution method and the capacity proportional distribution strategy is that the algorithm is simple. However, both control strategies do not consider the influence of external factors, such as the wind turbine position [
13] and wake effect [
14], which negatively affects control reliability in actual wind farms.
Recently, the penetration rate of wind power generation in local units has been growing. Control studies at the field station level have been drawing significant attention, especially with regard to the active power control mode and distribution algorithm. In [
15], each wind turbine’s expected power and the operating status during each power control cycle were classified. Thus, the active power of each type of wind turbine is differently controlled. The problem with this control strategy is that the prediction accuracy is reduced when the wind speed fluctuates. Additionally, a control error rate may occur. In another control strategy, a method for controlling the active power distribution of wind farms based on the priority method was proposed [
16,
17]. This control strategy comprehensively considers the turbine operating status and control characteristics and limits the power to each wind turbine according to a control sequence. However, the mechanical losses due to power control are not taken into account. Thus, the fatigue load is affected. Additionally, there have been concerns regarding the economics of wind farm operation due to the loss of limited power. A recent power control strategy was optimized according to an objective function by optimizing active power control based on the operating cost function of wind turbines [
18,
19]. This strategy was optimized to improve the economic operation of wind farms. However, an objective function with multiple factors can impose undue computational burdens on centralized controllers.
In this paper, a new method is proposed for improving the operation method of wind farms based on wind condition predictions. The proposed method takes into account the wake effect. This is because the change in wind speed due to the wake effect significantly affects the active power control environment. In addition, it was analyzed to implement a wind profile similar to that of the real environment. In the case of the proposed method, the optimal curtailment signal was derived using the look-up table based on the Monte Carlo. Based on this, a real-time simulation was performed on the wind farm model designed in RSCAD and verified the power loss reduction of the wind farm. This paper is composed of four main sections.
Section 2 analyzes the wake effect and discusses the method of controlling the active power of wind turbines.
Section 3 discusses ways for the effective reduction of control losses while focusing on the losses caused by energy curtailments. In addition, a simulation verification environment, HILs is discussed.
Section 4, to increase the accuracy of the simulation, analyzes the wind conditions in a way similar to the real environment, and compares case studies using an RTDS to verify the effectiveness of the proposed method. Finally,
Section 5 states the conclusions, expected effects, and future research plans.
2. Wind System Description
In the case of active power control, the generated power follows the maximum power point tracking (MPPT) and responds to the instructions of the TSO, such as curtailment when excess power is generated in the grid. Recently, the grid codes related to power curtailment have been strengthened to limit the surplus power generation and stably keep balance of the system. In the case of the power control method, an operator directly manages active power control according to grid system conditions and supply and demand. For example, control methods include delta control, maximum output limit, and output rate of change limit. As mentioned in the introduction, several studies are currently being conducted on the method of optimal curtailment. However, no specific methods have been presented to reduce power losses. In this paper, we propose an improved technique in terms of loss reduction.
2.1. The Wake Effect and Wake Model
Since a wind farm is arranged with several wind turbines, the wind turbines located at the front generate the wake effect. As a result, the amount of power in each wind turbine changes even under the same environmental conditions. In this process, the power curve remains, but the output amount of each wind turbine changes due to fluctuation in wind speed due to the wake effect. Therefore, it is essential to consider the wake effect when operating a wind farm. Large-scale wind farms incur losses due to various factors. In a previous study, the loss factor of each element was obtained, as shown in
Table 1 [
20]. The table shows that the wake effect occupies the most significant proportion in the loss coefficient. Therefore, in this study, a method of limiting the active power of wind farms was researched by predicting the wind speed value changed by the wake effect.
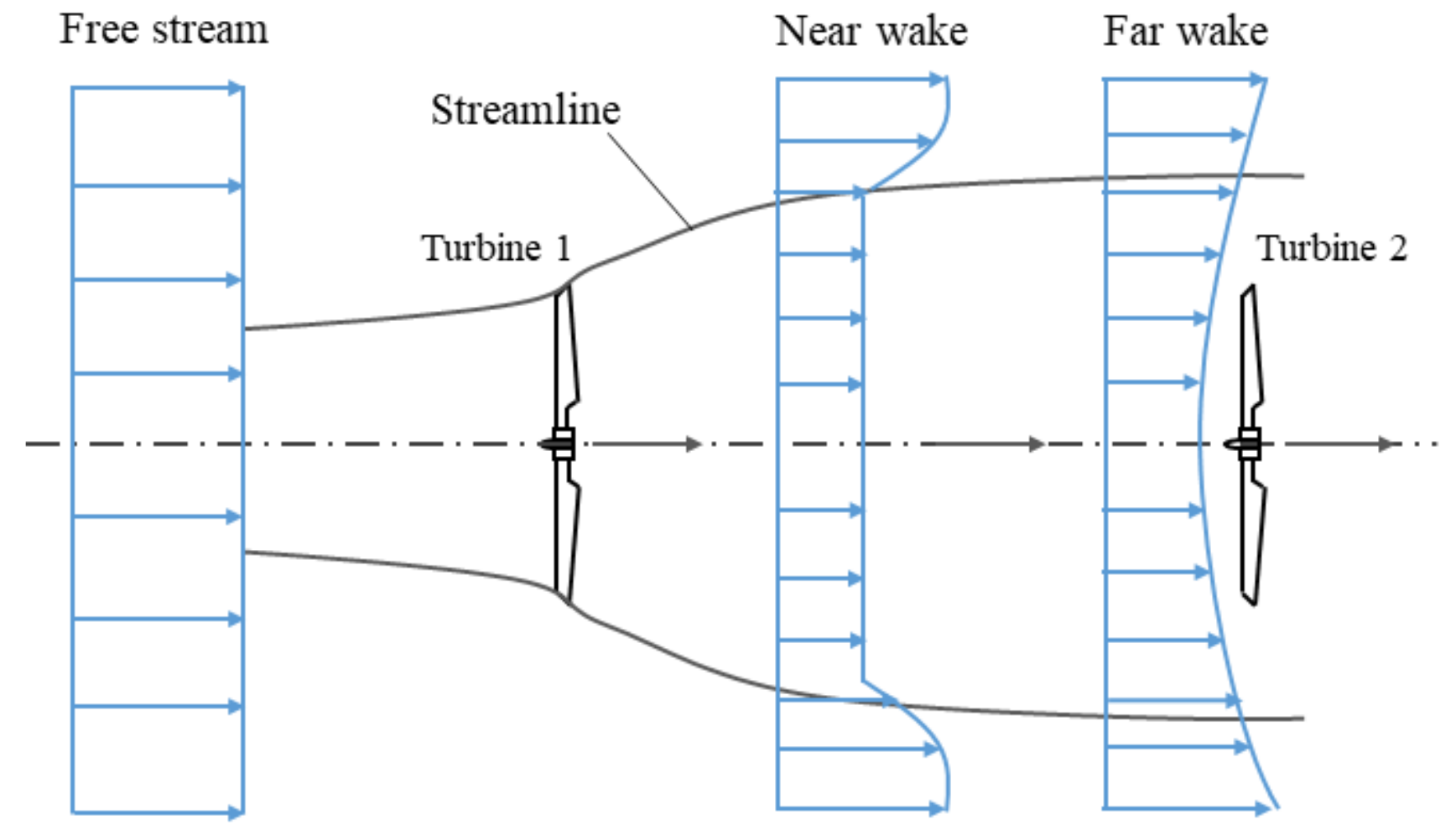
Figure 1 shows an example of the wake effect [
21]. The maximum wind energy can be extracted from wind Turbine 1 when a uniform wind passes. However, the passing wind is affected by turbulence, and the wind speed is slowed down by the rotational motion of the blade. This influence has a significant effect on the power output of the turbine located within the wake effect area. In addition, the fatigue loads, such as the motion loading patterns of wind turbines, may increase, and mechanical defects may occur due to the wake effect. As a result, the lifespan of individual turbines can considerably vary, and the operating and maintenance costs of some turbines can be increased. In this study, the main wind direction was analyzed using wind data measurements from an actual wind farm. In addition, the influence of individual wind turbines was verified through a wake model.
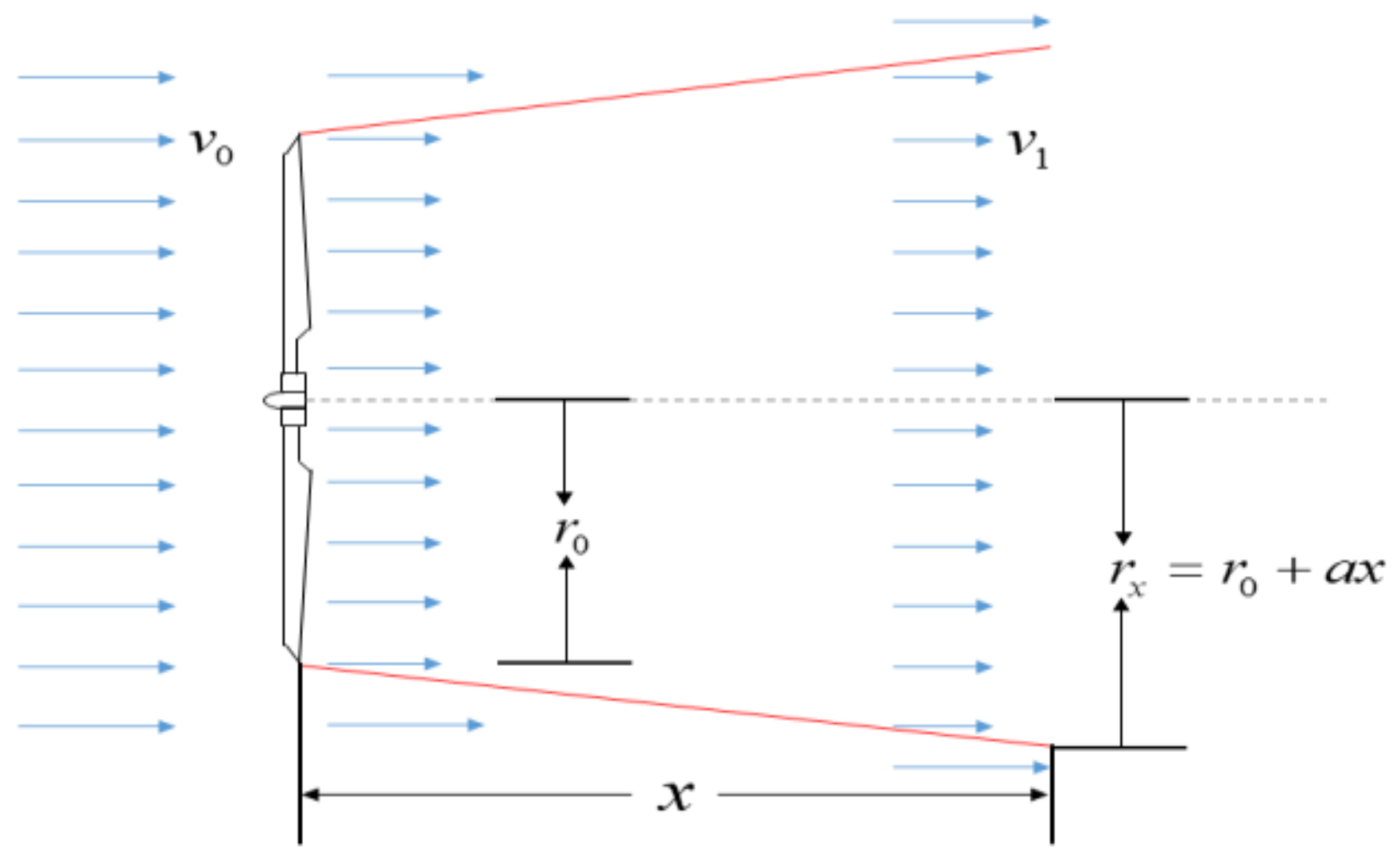
The wind farm’s output tends to decrease due to the wake effect. Minimizing the wake effect when constructing a wind farm layout is necessary. When building the wind farm layout, it should be batched to consider the separation distance of each wind turbine. In this study, active power was decided using the N.O Jensen model, and a long-distance wake model was illustrated, as shown in
Figure 2.
According to the Jensen model, the wind speed
due to the wake effect is obtained as follows:
where
represents the initial wind speed blowing to the blade,
is the blade radius,
is the thrust coefficient of the turbine, and
shows the linear dimension of the diffused wind that underwent the wake effect.
2.2. Active Power Control
In the case of wind power generation, the output is changed according to the wind speed. In particular, the output is changed according to the rotational speed of a wind turbine even when the same wind speed is input. In this process, MPPT controls the speed of the wind turbine to obtain maximum performance and improve the efficiency of power generation. As a result, maximum energy can be achieved under the same conditions. Therefore, wind farms should operate by applying MPPT. However, due to the increase in the grid connection of wind turbines, a grid can reach its acceptance limit. In particular, a wind power generator can increase power generation at night, but the power demand is less at night than at daytime. This means that oversupply is highly likely to occur, and the resulting overvoltage or reverse current may be intensified. Therefore, it is important to have stable operation systems for power supply systems and operate by the control command of the system operator. However, if the output control of wind power generation is not considered according to a grid system’s conditions, the share of wind power generation is limited to a certain level. Thus, large-scale wind farms must have an output control function based on supervisory control. In this paper, we propose the use of an optimal curtailment strategy based on the active power loss when switching from the wind power generator MPPT mode to the output limit control mode.
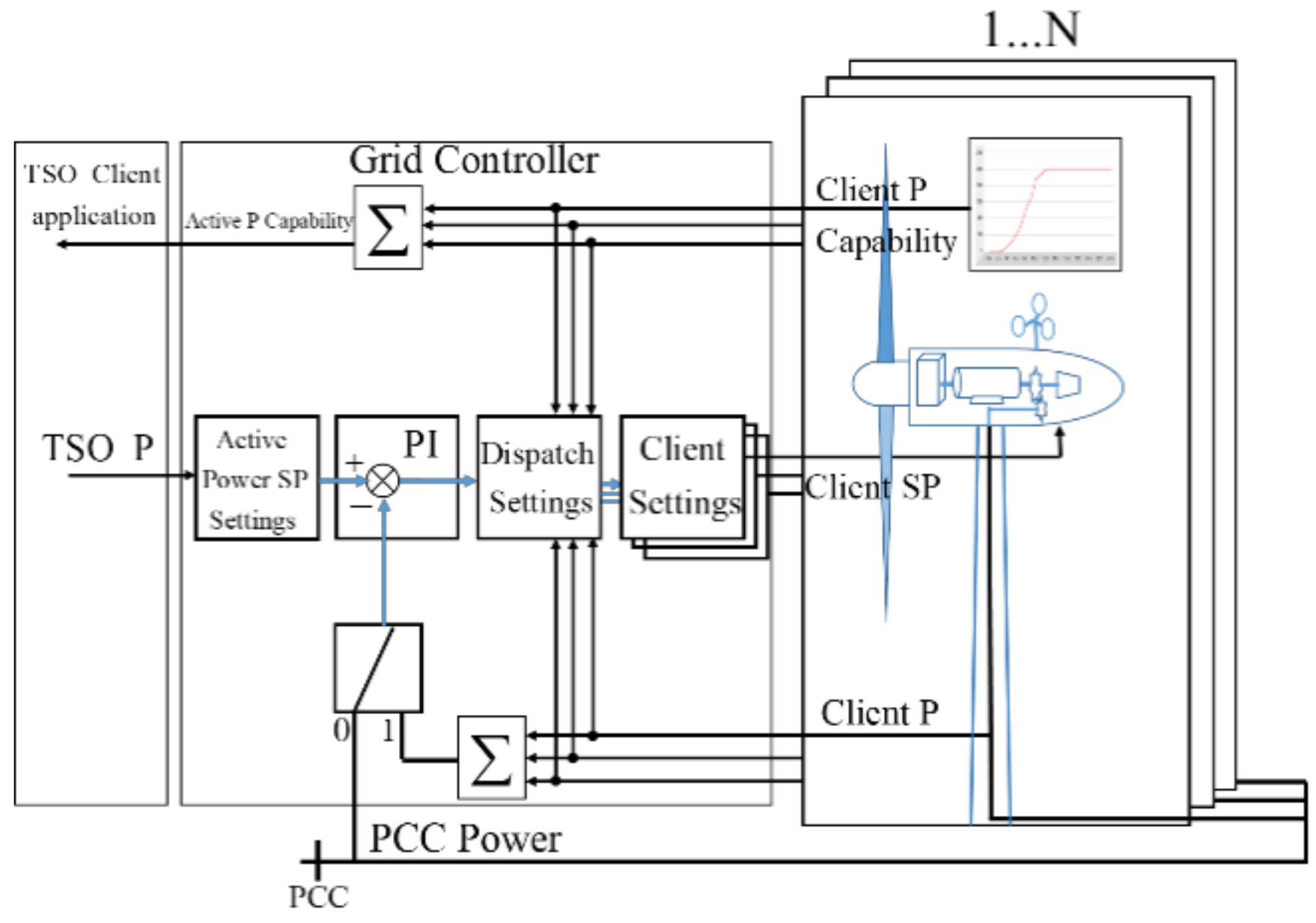
The active power setting SP generally determines the final active power output command based on the following factors: the system operator output command, wind farm operator setting, grid connected operating conditions, and wind farm grid connected standards. The PI controller feeds back the actual active power output using a point of common coupling (PCC) bus. At this time, if there are output fluctuations due to wind farm losses or wind speed changes, the wind farm’s output command is corrected. The active power command of each turbine is derived by reflecting the output measurement value of the PCC using the corresponding logic. In this process, the active power output value of the wind farm, which is required by the transmission system operator (TSO), can be distributed to individual turbines. A schematic diagram of the active power output control of individual wind turbines is shown in
Figure 3.
The active power amount of a wind power farm is expressed as follows:
where
is the total power of the wind farm measured at the PCC point,
is the power generated by an individual wind turbine, and
is the output power loss.
In general, wind turbines reduce output power to a certain part from a generator’s maximum capacity to balance supply and demand. In addition, wind turbines stably maintain frequency through output control in response to sudden load increases [
22]. The wind farm curtailment command based on the weight assigned to each turbine is as follows:
At this time, the individual weights of
are based on the sum of the total 1 and are expressed as follows:
where
is the number of wind turbines in a wind farm,
is the power limit of the wind farm,
is the curtailment weight allocated to individual wind turbines, and
is the curtailment of individual wind turbines.
This paper proposes a method to effectively reduce losses by focusing on the power losses caused by curtailments. The proposed method is expected to reduce the curtailment imbalance and the unilateral burden on wind power operators.
3. Monte Carlo-Based Weighting
3.1. Loss-Based Objective Functions and Constraints
The active power of a wind farm is controlled by a certain ratio of the output power through proportional distribution (PD) control. This method is simple and has a low computational load. However, it is considered inappropriate for minimizing the losses occurring in the process of allocating active power. Therefore, in this paper, a loss function is presented. Moreover, the optimal command value of individual wind power generators was calculated and then distributed to individual turbines based on the loss function. The objective functions based on the load data of each section line from an array to the wind turbine and the PCC is the same as in Equation (5). In accordance with the curtailment reference, the output power value for each turbine was calculated while focusing on loss reduction based on the proposed loss function.
where
and
represent the active and reactive power command values of the wind turbine,
is the voltage fluctuation in the
bus, and
is the resistance load in the n bus.
The objective function derived for calculating the weight based on a random number is expressed as follow:
where
represents a range of random numbers greater than 0 and less than 1, and
is a standard deviation for setting random numbers.
Based on Equation (6), the reduction weight assigned to each turbine was derived as shown in Equation (7). The corresponding weight was derived using the generated random number and total output limit command.
where
is a random number for representing the weight, and
is the total wind farm output.
According to the curtailment reference, the power value of individual turbines was calculated and prepared as a look-up table based on the proposed loss function.
3.2. Monte Carlo Simulation
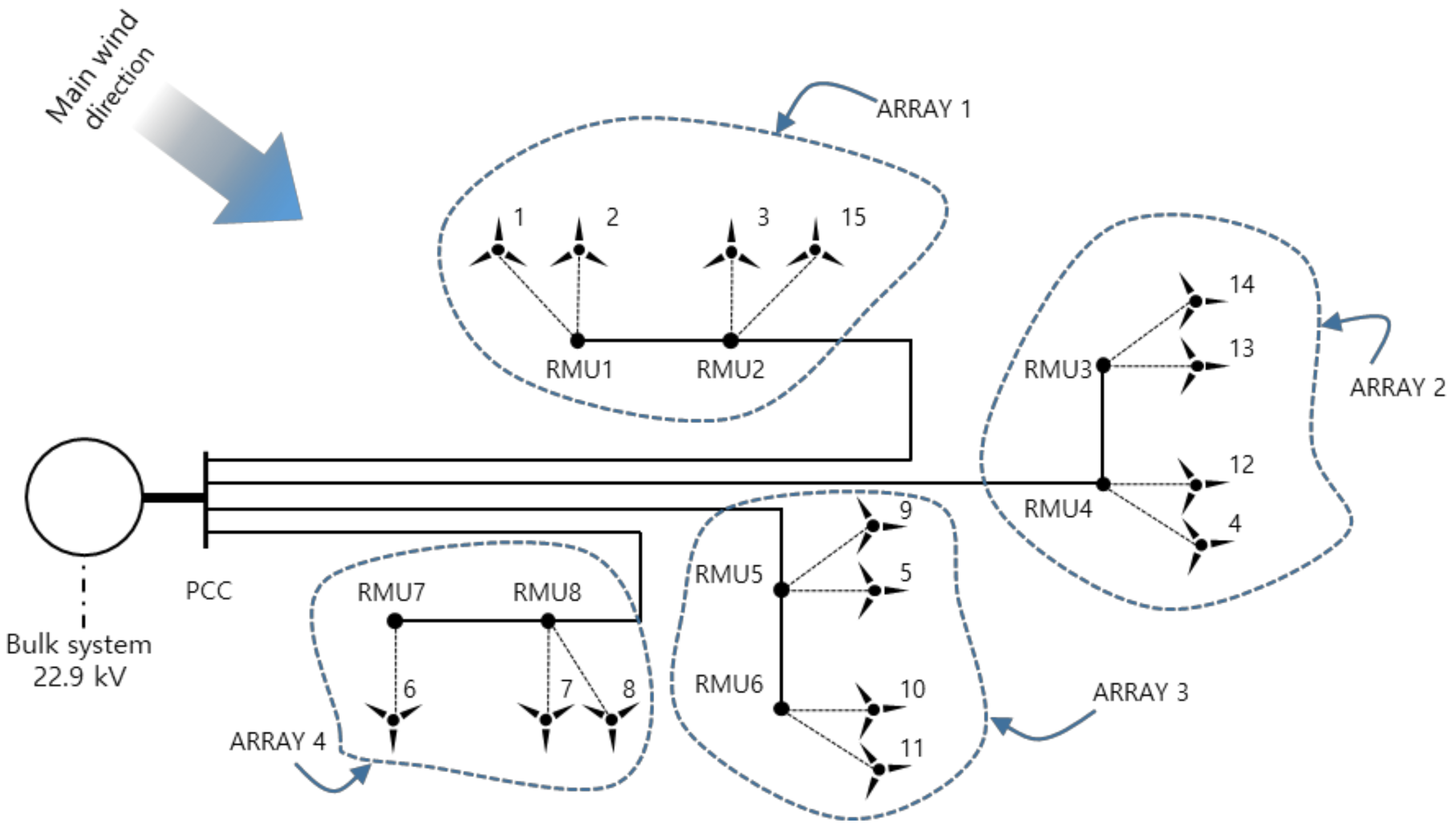
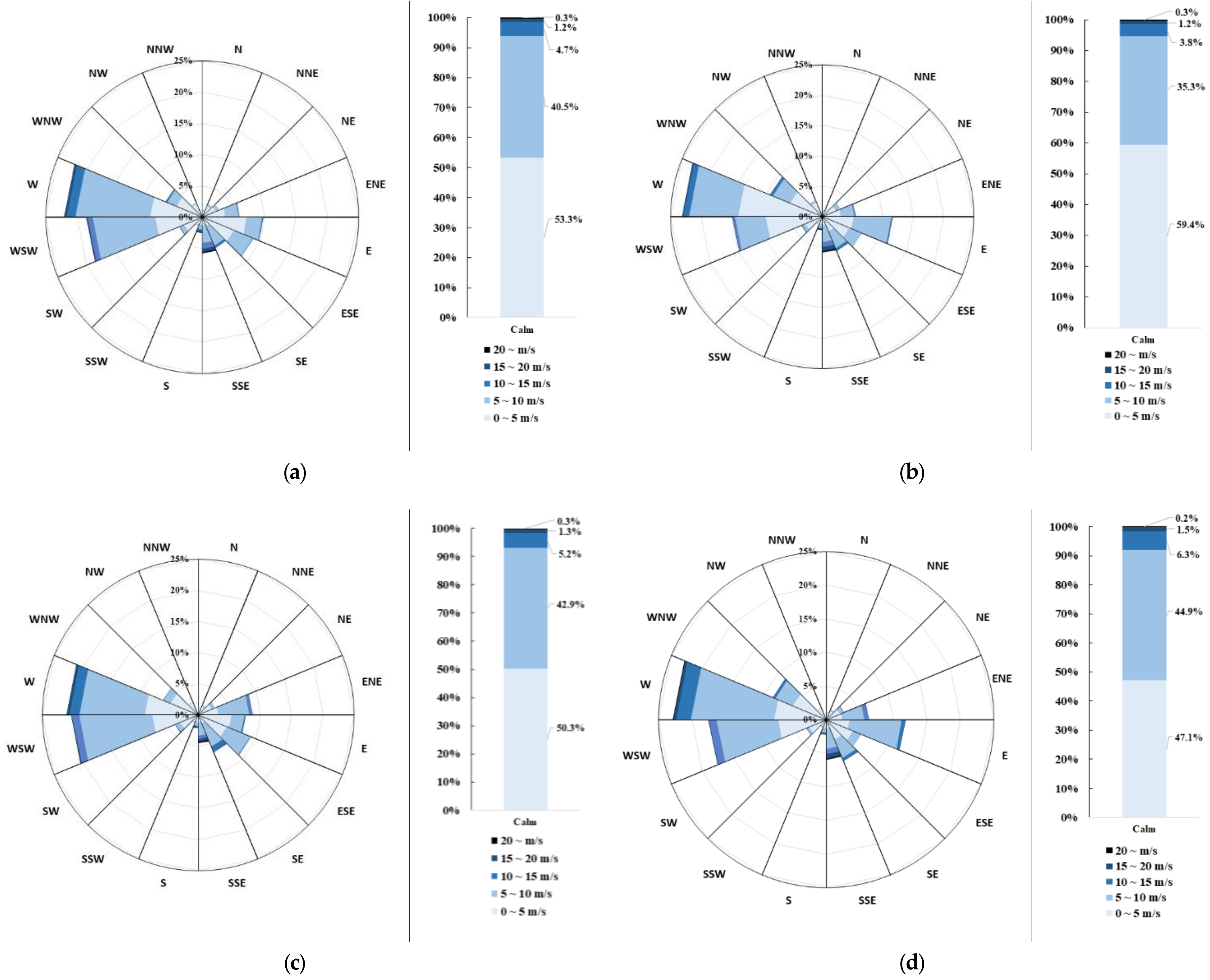
Monte Carlo is a wide range of algorithmic techniques that repeatedly use random sampling methods to achieve mathematical results and determine probability distributions for uncertain input variables. Furthermore, the results are derived according to a simulation repetition established by a random sample. This method is applied in optimization, numerical integration, and derivation from percentage distribution. In this work, the optimal value of active power was distributed to individual turbines using the Monte Carlo method while considering various weather conditions. The main wind direction of the wind farm was set based on measured wind data considering the wake effect according to the layout of the wind turbine.
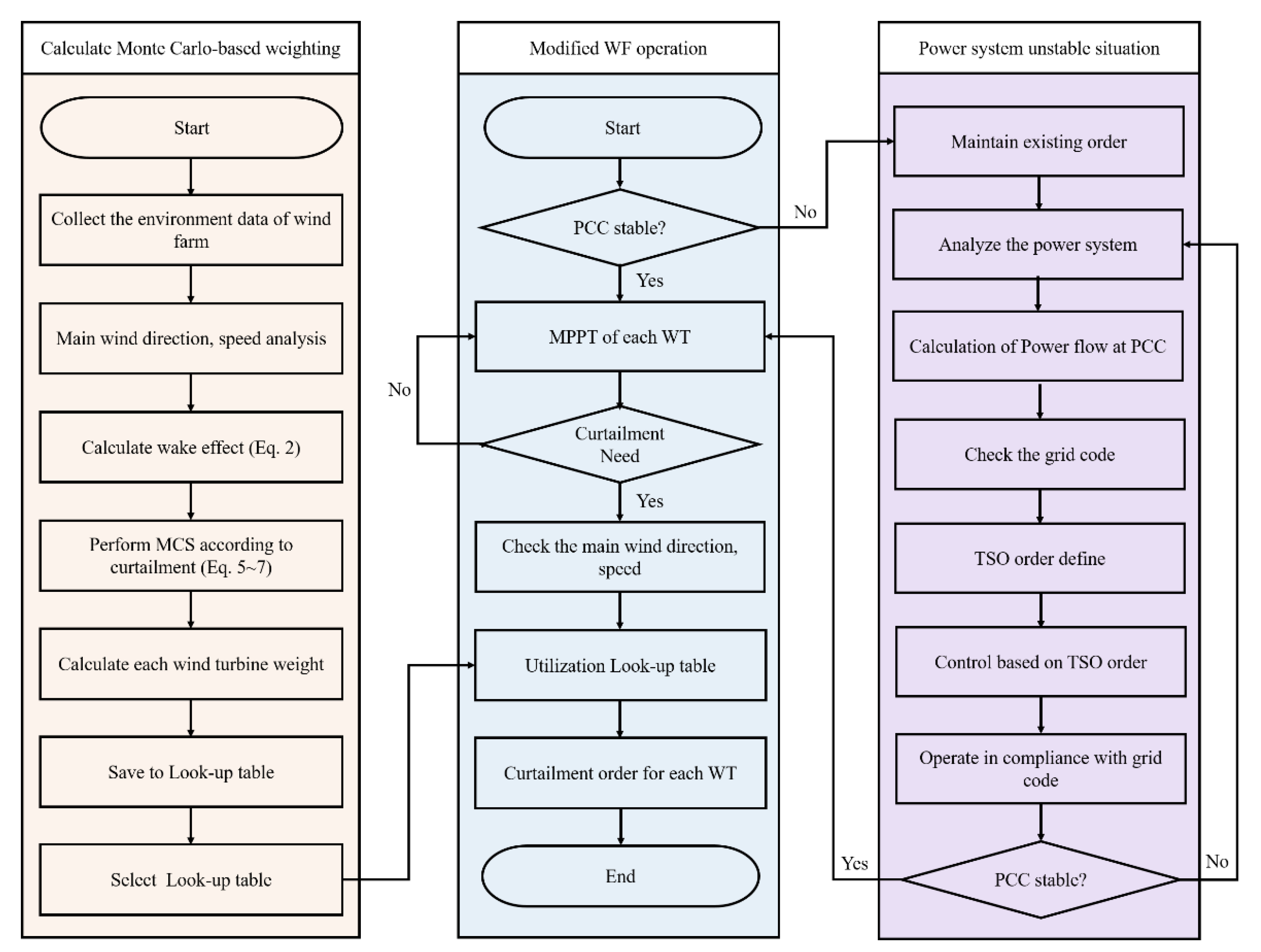
Figure 4 shows the algorithm performed by applying the Monte Carlo simulation. The active power command values were suitably distributed for individual wind power generators according to the algorithm.
The proposed algorithm differently distributes the values of individual turbines when it distributes the total active power command of a wind farm to individual turbines. First, the wind direction and speed data are collected from the environmental data of wind farms. The wind speed distribution along the main direction is analyzed through the collected data. Then, each output quantity is calculated considering the wake effect of each wind power generator on the analyzed wind condition data. Assuming that the output limit signal is input to the calculated wind power generator, the weight of the curtailment from each wind power generator was obtained using the proposed loss reduction objective function. The individual output data of the wind power generator according to the output limit was converted into a look-up table. When an output limit command is input, the active power output limit command is distributed by selecting it according to the order. Wind farm curtailment is performed using the look-up table. Before the curtailment order, the wind farm performs the MPPT operation. The system operator decides whether to curtail power or not based on the power supply and system demand and sets a command. Then, the optimal individual turbine command value from the look-up table is selected and distributed based on the current status of the wind farm and the set curtailment command information. However, the system operator the unstable state of the grid must be considered. Control that complies with the grid code should be prioritized for the power system’s stable operation. Determine the stability of the PCC and, in the case of unstable situations, operate according to the power system unstable situation algorithm. According to the existing command, the power system is analyzed. The power flow of PCC is calculated based on the analyzed power system result. A new TSO command is established based on the grid code and the analyzed power system state. The established TSO command is controlled for the stabilization of the power system. When the system is stabilized, control is performed according to the order of the modified WF operation algorithm.
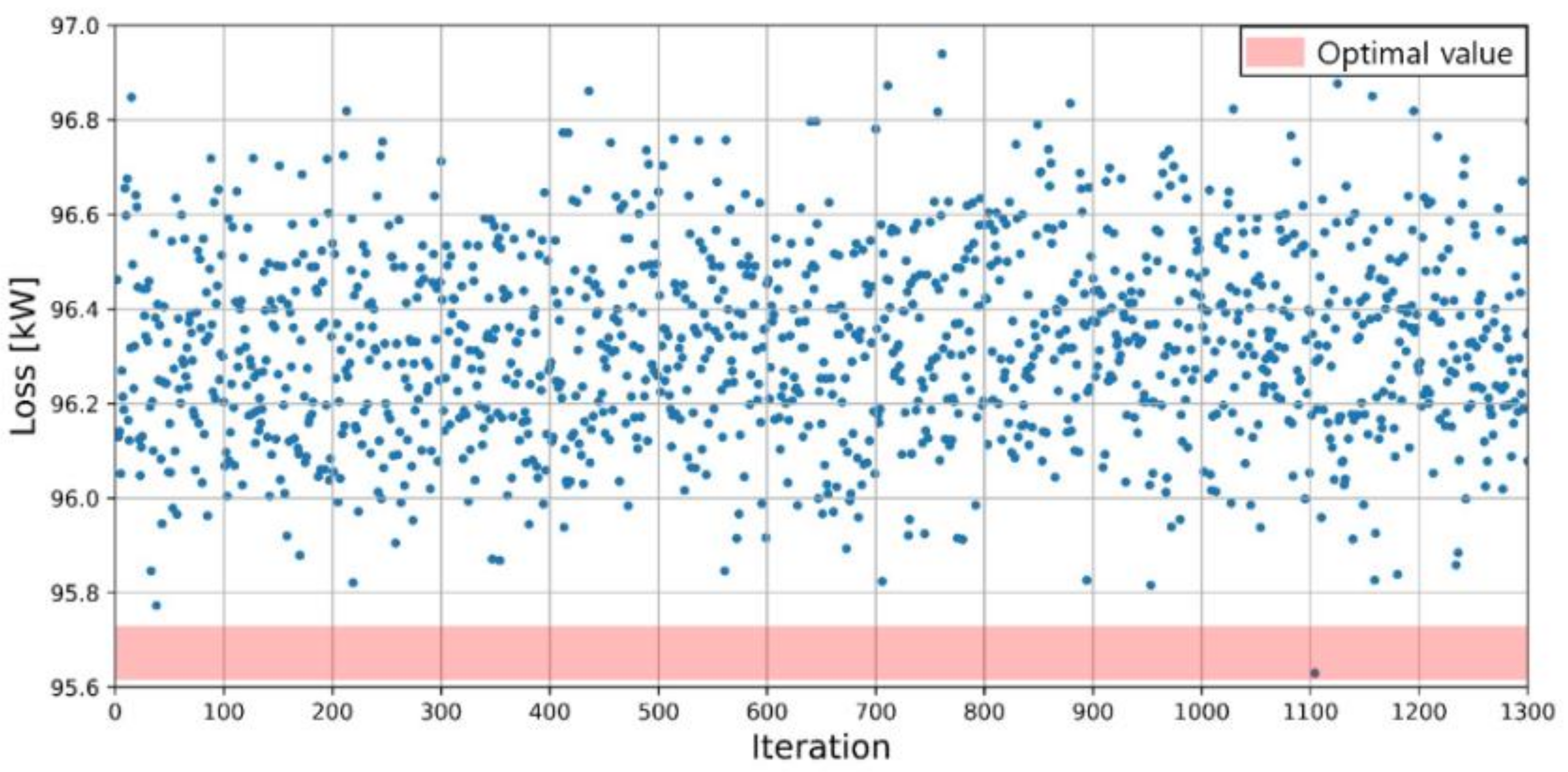
Monte Carlo simulations were performed to find optimal command values by generating random numbers based on loss reduction. The x-axis is the number of iterations based on the active power distribution value. For each iteration, different weights were derived based on random numbers, and the active power values were applied to individual turbines using the weights. According to each assigned active power value, the y-axis is the power loss value at the PCC point. Typically, Monte Carlo simulations are performed on a 10,000 basis. In this paper, as a result of running 10,000 simulations, no advanced results were obtained even when more iterations of 1300 times or more were performed. Therefore, the results of up to 1300 times were derived as a graph, as shown in
Figure 5.
3.3. HILs (Hardware-in-the-Loop Simulation)
HILs is a technology used for developing and testing complex embedded systems in real time. The HILs components include simulators that mathematically model systems and environments in which HILs target devices are operated. The simulator performs the function of simulating the operating environment of the HILs target devices in real time and uses HILs to build a simulated environment close to an actual operating environment to test the HILs target devices. To develop an embedded system with great precision, it is necessary to perform experiments on the entire system to which the system belongs in a real environment. However, it is practically impossible to perform tests in a natural environment. In particular, when the target system is a wind farm, this task becomes impossible due to economic viability and accessibility. Therefore, HILs is an effective method when conducting wind farm-based research because it provides test environments similar to actual environments. In addition to these advantages, HILs can significantly reduce the development time and cost by detecting errors, taking actions to fix them, and performing trial and error in advance.
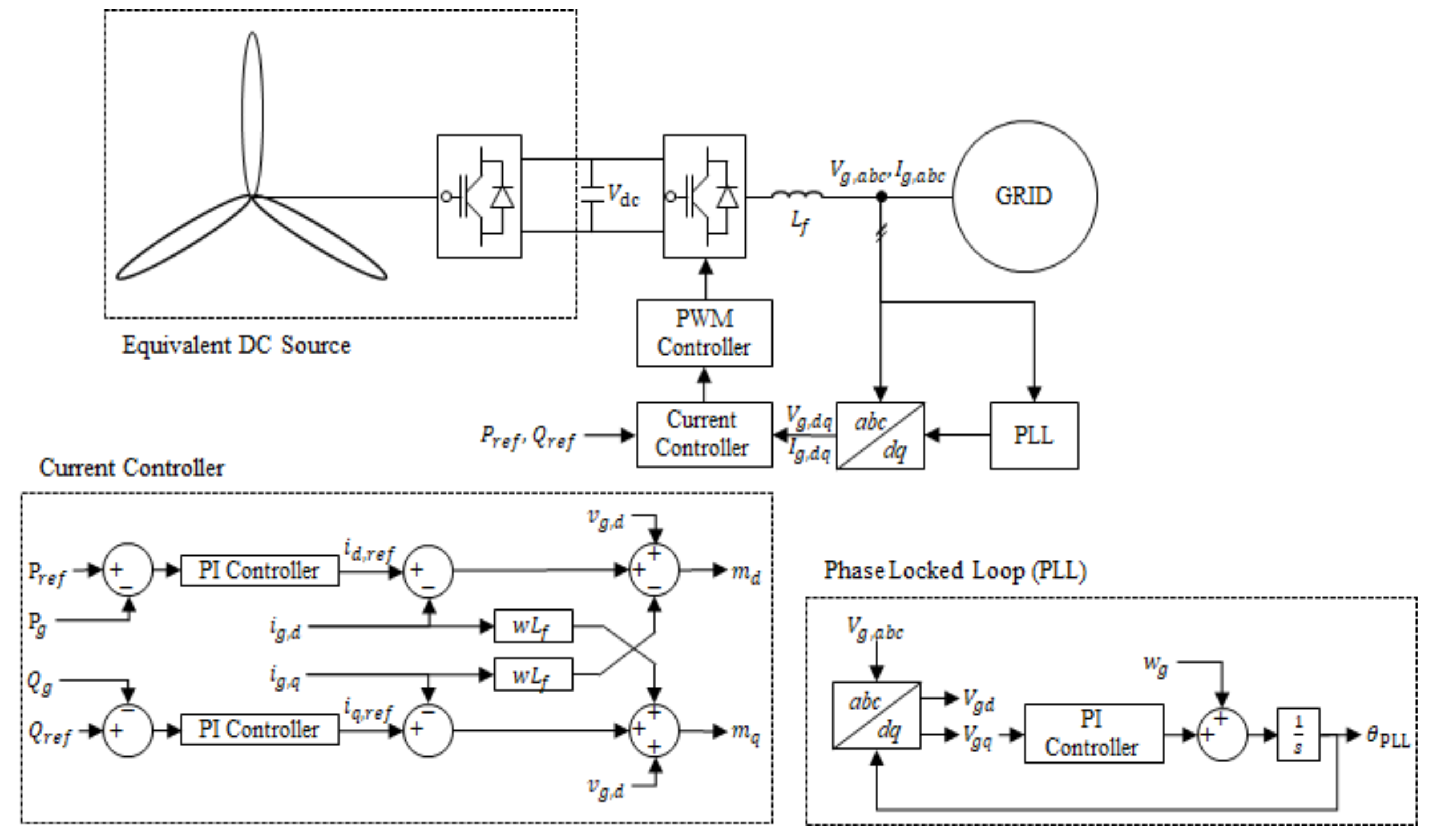
Figure 6 shows the HILs configuration for active power control in a wind farm. The TSO controls the stable power supply based on the wind farm data obtained through the wind farm management system (WFMS). When the wind farm produces more energy than required by the TSO, an output limiting signal is transmitted. In the WFMS, the output limit command value required by the TSO is distributed to individual wind turbines. At this time, the command value is calculated considering the wind turbine wake effect and the loss-based Monte Carlo method. In addition, the signal of the distributed command is entered in the HILs configuration to perform control. In this paper, each wind turbine in the wind farm was assumed as a full converter interfaced model. A simplified wind turbine model implemented in HILs configuration is depicted in
Figure 7 as the control strategy proposed in this paper is focused on the grid side converter to minimize active power loss within the wind farm by controlling the active power of each wind turbine. The active and reactive power injected from each wind turbine can be computed as Equations (8) and (9).
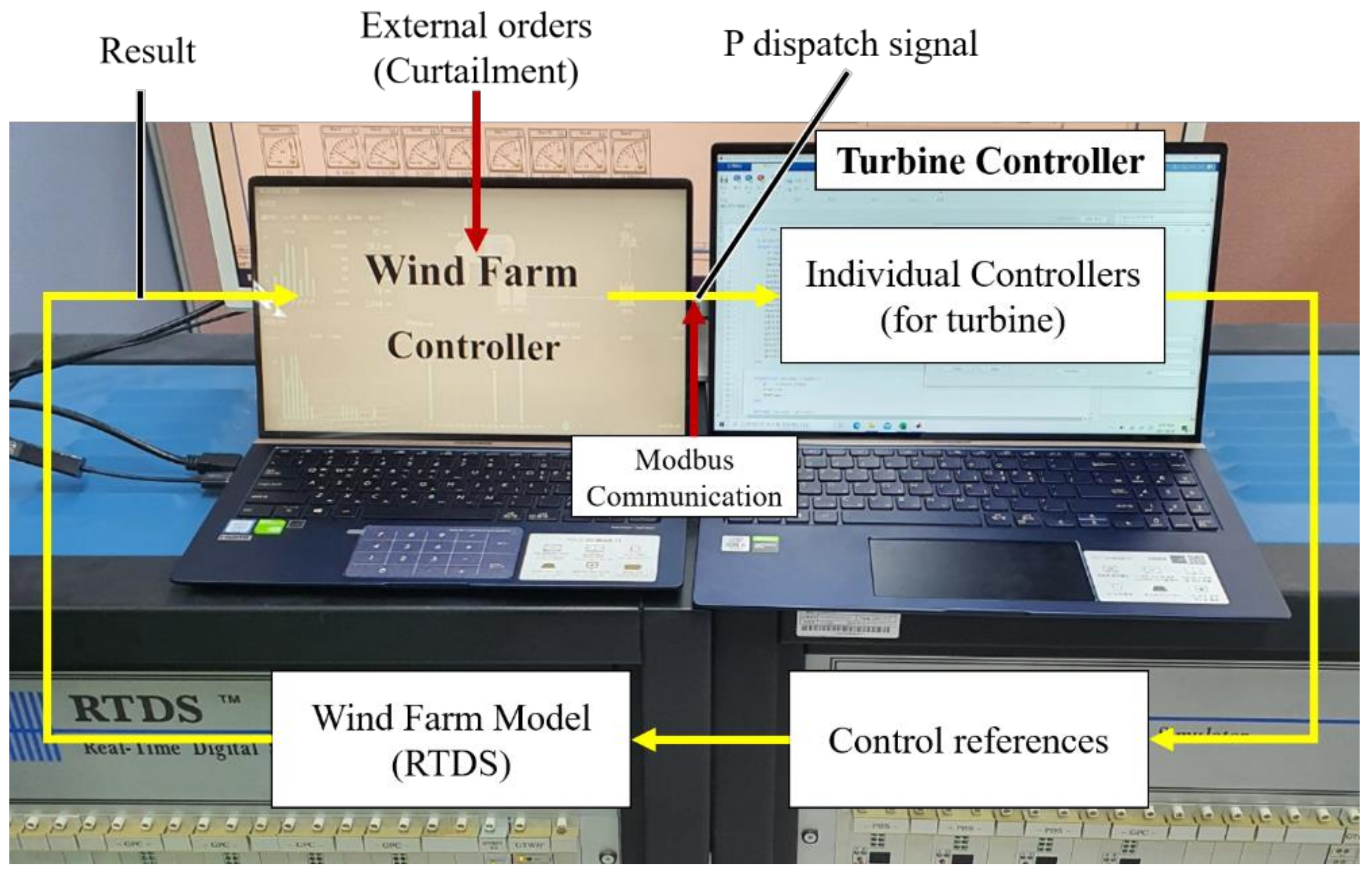
The control structure flow, including the implemented real HILs, is shown in
Figure 8. The HILs consist of a separate computer as a wind farm controller, a turbine controller, and a grid model of the RTDS. Each PC was configured by reflecting individual algorithms according to their roles. When an active/reactive signal is received, the wind farm controller sends the control signal to each turbine, and the RTDS operates based on the control signal. It is a structure in which the PC manages the signal, and the signal is transmitted using the MODBUS protocol. When surplus power is measured, the wind farm controller may receive the TSO curtailment signal. The transmitted signal outputs the curtailment signal of the individual wind turbine according to the control command established in the MCS table from the wind farm controller. The curtailment signal is entered as a dispatch signal to the wind farm configured in RSCAD based on the equivalent model expressed in
Figure 7. Through the curtailment signal, the individual wind turbines and the PCC’s changed output are monitored in real time by the wind farm controller. A mode bus protocol was used to send and receive control signals during this process. In addition, the amount of power loss reduction of the proposed method can be confirmed through this control structure.
5. Conclusions
In this paper, a study was conducted on optimization command values according to curtailment signals. The proposed method is based on power losses, and the Monte Carlo algorithm was applied to assign curtailment signals. Next, a simulation was performed by making the calculated values in a look-up table based on the proposed algorithm. In the case of a power curtailment requirement from the TSO, the proposed method showed that the computational burden of the wind farm controller could be reduced while reducing the active power loss. As the simulation results show, the power loss could be improved compared with that of the proportion distribution method when controlling the MCS table method to actual wind farms. When applied to a large-scale wind farm, the amount of power loss improvement is expected to increase. Additionally, it is expected that more sophisticated design simulations can be performed through linkage with existing wind farm management systems using the RTDS model. However, there are still some shortcomings that need to be completed. Based on this study, it is necessary to further explore the control for wind directions other than the main wind direction. This helps reduce power loss with the active power control flexible in various output limiting scenarios. In addition, the detailed controller needs to be modified to reflect momentary changes in system conditions such as accidents. Finally, from the operation viewpoint, a detailed economic analysis should be done based on power loss reduction.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}