1. Introduction
Currently, high-performance processors and devices dissipate heat of 300 Watts and more, which requires very efficient cooling systems.
In CMOS circuits, power consumption depends mostly upon clock frequency. Presently, in CMOS technology of 10 nm and less, power losses consist of two components: the first one is a DC value in a stand-by-state caused by the constant leakage current (static component), and the other is proportional to the clock frequency, which is called the dynamic component. Each time a circuit switches its logical state, all capacitances are charged or discharged, giving rise to a fixed amount of energy to be converted into heat. The higher the clock frequency, the more switching per time unit and the more heat is generated. For the CMOS technology up to 1 µm (e.g., high voltage devices) [
1], the leakage current is relatively small, so mostly dynamic heat generation has to be considered. The power consumption is then just proportional to the clock frequency [
2]. Digital integrated circuits are normally operating at a fixed clock frequency. This basic clock signal being generated by an external quartz crystal oscillator guarantees a very stable frequency. Sometimes the clock frequency fed to a circuit is reduced intentionally or automatically to reduce power consumption. Nevertheless, as long as we use data processing by means of electron devices, we have to consider energy losses.
Due to the high power dissipations in present-day electronics, cooling and temperature management are and will be an important topic [
2,
3,
4,
5,
6,
7,
8,
9,
10,
11,
12,
13]. Although fan cooling is the most widely used, other alternatives such as natural convection, liquid cooling, heat pipes, new materials, Peltier heat pumps, harvesting, etc. are also used. Their selection and application depend on the kind of heat source to be cooled, availability of stationary energy sources, accepted size limit, weight, noise level, etc. [
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26,
27].
Fan cooling is quite efficient, but a fan produces noise and suffers from limited mechanical reliability. In this paper, we present a short theoretical study on Peltier cooling of integrated circuits. A Peltier cell pumps the heat from the front side (cold junction) to the back one (hot junction). The hot side has still to be cooled convectively. Nevertheless, the main job of the Peltier cell is to actively transfer the heat from a small area of the integrated circuit to a larger area so that even natural convection will then be sufficient for cooling the hot side of the Peltier cell. Otherwise, if one still wants to use forced convection cooling, one of the major advantages (i.e., no moving parts) is becoming lost [
17].
The paper contains the answer to the question of how to control the Peltier heat pump to achieve the required influence on the temperature of a cooled semiconductor chip. The problem seems to be crucial, especially from two points of view: how to achieve a minimum chip temperature and to obtain maximum device throughput. The throughput improvement in the thermal aspect has been criticised by many authors [
3,
4,
7,
9,
15,
26].
A shrinking CMOS channel up to 7 nm and less (if possible) is very close to the limit of reachability from a physical point of view [
28,
29,
30]. The main challenge for these high-performance devices is to ensure proper working temperature to reduce the interior energy density of the semiconductor structure. Decreasing the semiconductor structure temperature involves increasing its reliability and working efficiency [
10,
11,
21,
25].
The Peltier heat pump action is based on three thermoelectric phenomena: Peltier’s, Seebeck’s and Thomson’s [
31]. The fourth (undesirable) phenomenon is Joule heat generation.
The Peltier effect is a thermoelectric phenomenon in solids consisting of the release or absorption of energy under the influence of electric current flowing through the junction. By absorbing energy at one junction and giving off energy at the other, a temperature difference is created between the junctions. The phenomenon is opposite to the Seebeck effect.
The Thomson phenomenon consists of the release or absorption of heat during the flow of an electric current (so-called Thomson heat) in a conductor in which there is a temperature gradient. The amount of heat released or absorbed is proportional to the temperature difference, current intensity and duration of its flow, as well as the type of conductor. The Seebeck effect is also used for temperature measurement. It means that the Peltier heat pump is able both to transfer heat energy and to deliver information about the current temperature of the cooled object.
A singular Peltier’s cell usually consists of two cuboids of n- and p-type semiconductors and three plates made of copper (
Figure 1a).
Heat taken on a cold side and electrical energy supplied from outside are finally transported to the environment via the hot side.
The classical feedback loop in an active heat sink control system with Peltier pumps, commonly used in practice, is shown in
Figure 1b and is based on the feedback caused by temperature sensors. The Peltier pump is driven to obtain the minimum chip temperature [
6,
9,
10,
11,
17,
20,
24]. The main disadvantages of the classical method are: large time delay in response to power changes (inertia of chip temperature sensors), sensitivity to the position of temperature sensors and chip temperature oscillations. This leads to an increase in the maximum operating temperature.
A Peltier cell needs a supply current to activate heat pumping. This current can be electronically regulated so that the amount of heat pumped away from the integrated circuit can be varied in time. This current can be reduced as much as possible. Consequently, the cooling energy can be kept minimal.
Typically, the Peltier module makes it possible to improve the efficiency of the cooling of semiconductor devices. In that paper [
32], it is shown that in specific situations, the use of a Peltier module can cause worsening efficiency of heat removal. Such an effect is observed when the power dissipated in the cooled device is higher than the power that can be removed by the heat sink.
In this contribution, we present the idea of using the dissipated power in the circuit as the control parameter. Because most digital circuits operate at a constant DC supply voltage, measuring the supply current is enough to know the consumed power at any time [
10].
Normally one should expect to use silicon temperature as the main control parameter. However, the supplied power, which is converted almost entirely into heat, is always a thermal time constant ahead of the corresponding temperature rise. If the power increases suddenly, the silicon temperature will rise with a certain delay, but during this time, the control circuit can adjust the Peltier current so that the temperature rise will be kept as low as possible.
The temperature regulation of a silicon integrated circuit with a Peltier heat pump by using the dissipated power as the main control parameter will be analysed theoretically using a simple thermal equivalent network. Theoretical considerations are illustrated by some results of computations.
2. Basic Analysis
The structure that will be analysed in this paper is shown in
Figure 2. A silicon chip dissipating an amount of power
P is thermally connected to the cold junction of a Peltier cooling cell. The other (hot) junction is connected to a cooling fin that, during this turn, is cooled convectively. The cooling of the front side of the silicon is neglected here. Hence, the entire heat flow is assumed to pass through the Peltier heat pump.
Figure 3 presents examples of a multi-cell Peltier pump (a), a Peltier pump dissipating heat with the assistance of a cooling fin (b) and a three-component system consisting of a heat pump, cooling fin and fan (c).
The thermal analysis of the structure, shown in
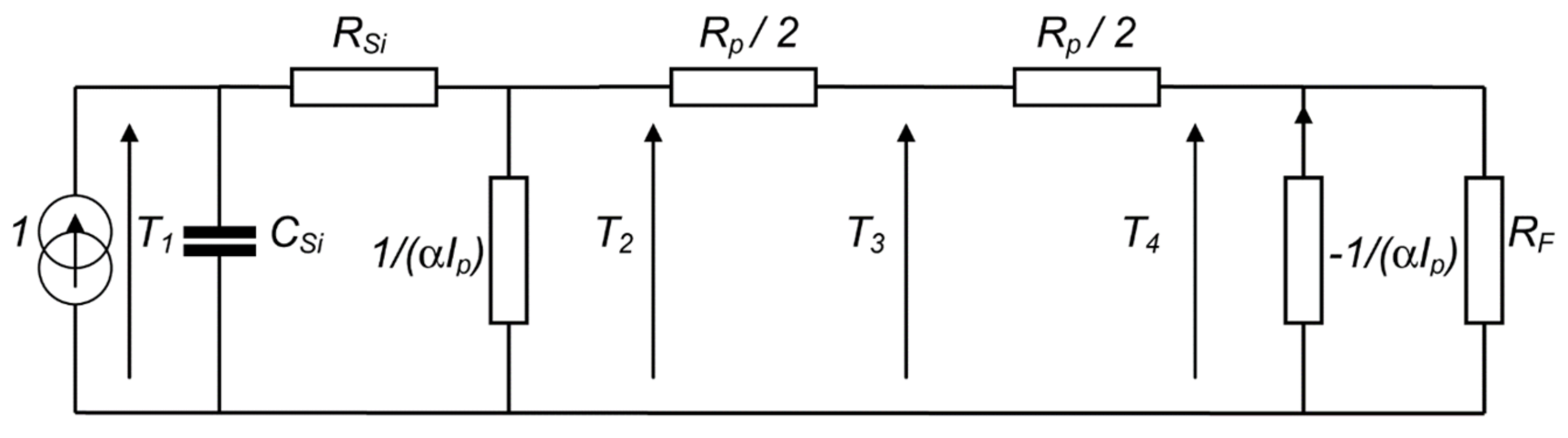
Figure 2, will be performed with the help of the equivalent thermal network shown in
Figure 4.
The silicon is represented by a thermal capacitance CSi and a thermal resistance RSi. The power P dissipated on the front side of the silicon, is transported through RSi to the Peltier heat pump. T is the silicon’s temperature.
The Peltier cell itself has a cold side (temperature
TC) and a hot side (temperature
TH). If an electric current
Ip is supplied to the heat pump, the amount of heat α
Ip (
TC +
Ta) is removed from the cold side and, similarly, the amount α
Ip (
TH +
Ta) is fed to the hot side. α is a constant proportional to the Peltier coefficient and characteristic for a given heat pump [
23].
TC +
Ta is the absolute temperature of the cold side. As we are dealing in
Figure 3 with a temperature rising above the ambient, the absolute value of the ambient temperature
Ta has to be included in the current sources. Similarly,
TH +
Ta has to be used for the hot side. The Peltier cell itself also has a thermal resistance
Rp between the cold and the hot side. However, the Peltier heat pump also has an electric resistance denoted by
Rel. The supplied current
Ip then gives rise to an additional heat generation given by
RelIp2. This power is dissipated in the semiconducting part of the Peltier cell, which is located in the centre. Hence, it is most convenient to split the thermal resistance
Rp into two equal parts and supply the Joule heat
RelIp2 into the central node (
Figure 4).
Finally, the hot side of the heat pump is cooled by a cooling fin, which can be simply represented by a thermal resistance
RF (
Figure 4). Note that the reference point of
Figure 4 corresponds to the ambient temperature, and all temperatures shown in
Figure 4 are temperature differences with respect to the ambient. This reference point is usually denoted as the “mass” in electric circuits. Only the value
Ta is an absolute temperature expressed in Kelvin, as already pointed out.
In order to solve the network of
Figure 4, some simplifications can be carried out. First of all, the current source α
Ip (
TC +
Ta) can be replaced by two sources in parallel: α
Ip TC and α
Ip Ta. The first one, α
Ip TC, delivers a current proportional to
TC, which is nothing else than the temperature drop across the source. Hence, this is equivalent to the thermal resistance 1/(α
Ip). In a similar way, one can handle the current source α
Ip (
TH +
Ta). Considering that this source is oriented in the other direction, one now obtains a negative equivalent thermal resistance 1/(α
Ip), as shown in
Figure 5.
We are interested in finding the silicon temperature
T. The easiest way to deal with the four current sources in
Figure 5 is to use the well-known reciprocity theorem, which is described in many textbooks on basic network analysis.
For example, if one wants to know the influence of α
IpTa on
T, one has just to interchange the position of the source α
Ip Ta with the source
P and to detect the temperature
T on the previous position of the source α
Ip Ta. This gives rise to the network shown in
Figure 6.
The same procedure has to be repeated for all the current sources in
Figure 6. Finally, only one single (unit-valued) current source is needed, and the temperatures
T1,
T2,
T3 and
T4 have to be evaluated. The final temperature
T that we are seeking is then given by the superposition:
Remark that
T1,
T2,
T3 and
T4 are temperatures for a unit power input and, hence, they are expressed in
K/W and not in
K. Without going into the mathematical details, the following equation is found for the temperature
T [
11]:
where
and
Generally, both the power
P and the Peltier current
Ip can be a function of the time
t, depending on the proposed control mechanism. In this case, the solution of (2) can be a quite complicated mathematical expression. Therefore, we will only consider the case where the power
P varies from one constant value to another one. Moreover, we assume the Peltier current
Ip is a function of the power
P only. Under these assumptions, (3) and (4) can be treated as constants and the expression (2) is a simple first-order differential equation with constant coefficients. If at
t = 0 the power
P changes from
P0 (
t < 0) to
P1 (
t > 0), the solution reads:
where
T0 is the steady-state value corresponding to
P0.
3. Optimal Control Strategy
The main purpose of this paper is to find a simple optimal control function Ip(P). If the power changes stepwise, the Peltier current Ip will vary accordingly. The control strategy is to keep the silicon temperature as low as possible. The value of the thermal time constant RtCSi is then no longer crucial because the maximum value of (5) either occurs at t = 0 (if the power is decreasing) or at t = ∞ (if the power is increasing). If the power dissipation in the integrated circuit increases from P0 to P1, one does not generally know how long the dissipation level P1 will last. Hence, in other words, one has no idea whether P1 will exist for a time greater than or smaller than the thermal time constant RtCSi. The only remaining criterion is to minimise the temperature value for t = ∞ or to minimise T∞.
We do not lose the generality of consideration if we assume that RSi = Rp = R and RF = βR. The condition RSi = Rp is introduced to simplify the mathematical expressions and has no impact on the conclusions. If the cooling fin is cooled by natural convection, RF >> R or β >> 1. If intensive forced convection cooling is used, it may be possible that β is close to unity or even less.
Introducing the new parameter
ξ = α IpR, one obtains from (3) and (4):
The Peltier current is, of course, quite limited. It does not make any sense to supply an excessive current
Ip through a Peltier cell because the Joule heating
Rel Ip2 would dominate the cooling properties of the heat pump. High values for
Ip can also give rise to the unstable behaviour of the Peltier heat pump [
23]. Hence,
ξ = α Ip R can be considered a small parameter. One can then expand (7) in a series and neglect all terms of order
ξ3 and higher:
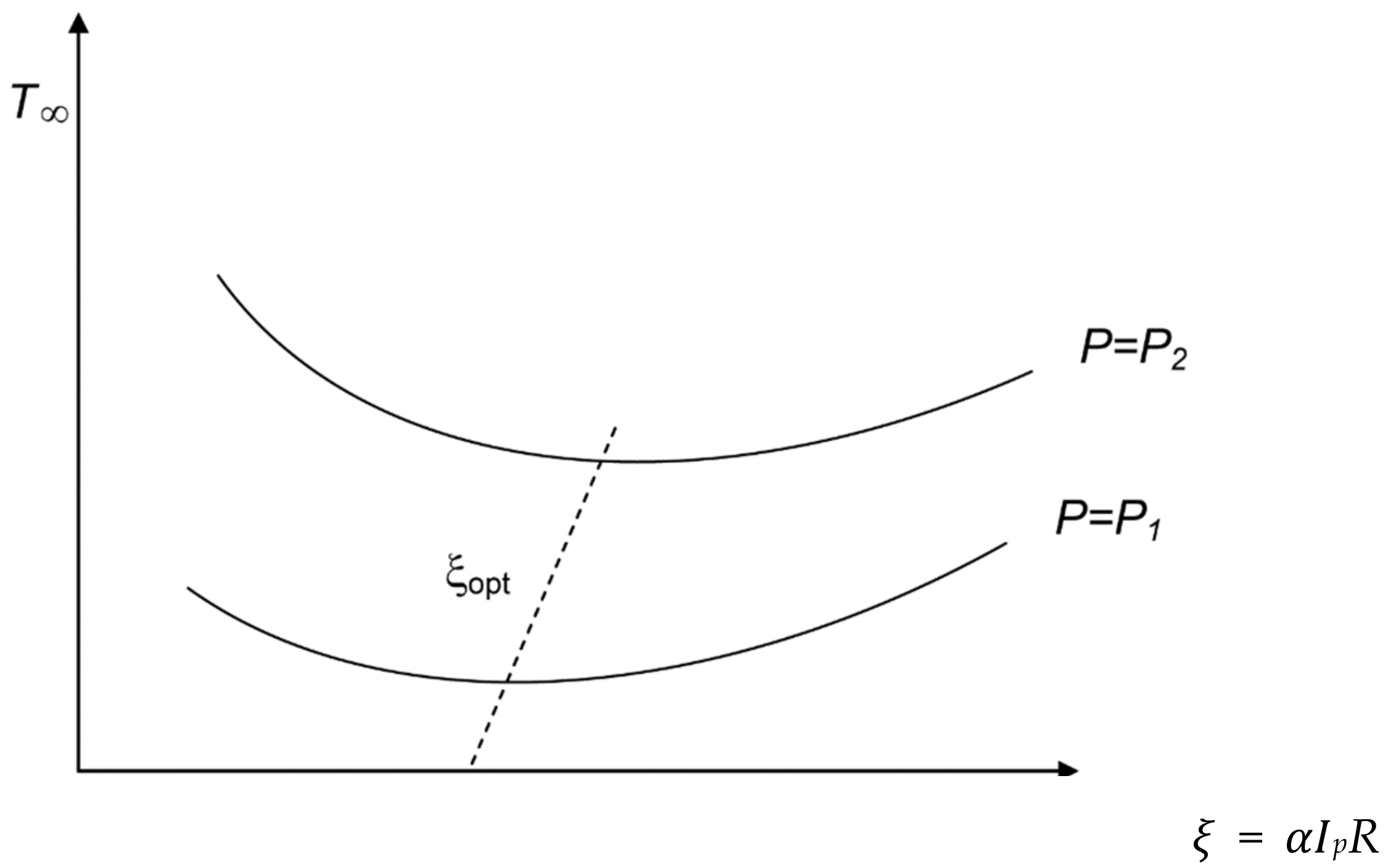
A graphical representation of (8) is sketched in
Figure 7.
For the parabolic relation (8), it is quite easy to find the point of minimum
T∞:The sketch shown in
Figure 6 clearly shows the influence of the Peltier cooling as long as
ξ <
ξopt. As soon as
ξ > ξopt, the Joule heating of the Peltier becomes too high. The latter must be avoided. Considering that the power dissipation may vary in time, one should use the optimal value
ξopt corresponding to the highest power dissipation. The additional benefit of using a Peltier heat pump is that we do not have to use a separate temperature sensor to measure the chip temperature. Thanks to the Seebeck effect, the temperature can be estimated with sufficient accuracy.
One can prove that
ξopt increases with the power
P for
β < 1. The situation
β > 1 corresponds to a cooling fin with higher thermal resistance. It does not make sense to use an expensive Peltier cell where the hot side is cooled by a fin with high thermal resistance. If the dissipated power
P is increased, one has to supply a higher Peltier current
Ip in order to maintain the optimal cooling conditions given by (9). As can be seen from
Figure 7, the variation of
Ip is less than the variation of
P.
For very small values of the power
P, Equation (9) can be replaced by:
ξopt turns out to be a constant value. Note that for β < 1, a negative term appears in the denominator. It is then possible that ξopt can be negative as well, depending on the value of the other term. This situation looks rather cumbersome, but one should bear in mind that β < 1 corresponds to a cooling fin with a thermal resistance RF much less than the other thermal resistances. This is a common situation because the hot side of a Peltier cell has to be thermally connected to a cooling fin with small thermal resistance to the ambient air. However, if RF is extremely small, it is more convenient to connect the silicon chip directly to the cooling fin. Introducing a Peltier cell between them is then no longer helpful, as it becomes an additional thermal resistance between the silicon chip and the cooling fin.
For very high values of the power
P, the relation (9) can be simplified to:
In other words, ξopt becomes a negative constant. Physically, this has no meaning. A high power implies a high Peltier current so that the Peltier power RelIp 2 is also very high or, in other words, the Peltier cell is converted into a second and unwanted heat source. Moreover, the analysis presented so far is only valid for sufficiently small values of ξ, as outlined in (8) in which terms such as ξ3 have been neglected in the series expansion.
4. Investigation Results
With the use of the model of the cooling system under consideration, shown in
Figure 5, computer simulations were performed to illustrate the influence of selected factors on the parameters of this system. The computations were made in SPICE. The following values of the model parameters were used in the computations:
α = 6.8 mV/K,
Ta = 300 K,
Rp = 10 K/W,
RSi = 1 K/W and
Rel = 0.18 Ω.
The results obtained for different values of power supply and cooling conditions of the Peltier module and for different values of the power dissipated in a cooled semiconductor device are shown in
Figure 8,
Figure 9,
Figure 10. All these figures show the dependence of the junction temperature of the semiconductor device on the power dissipated in the cooled device (
Figure 8) and the current supplying the Peltier module (
Figure 9 and
Figure 10).
Figure 8 shows that the obtained dependences
Tj(p) are practically linear functions, and the value of the current
Ip affects only the value of the slope of the relationship under consideration and the value of the temperature
Tj of the device in which no power is dissipated. Due to the Peltier effect, the temperature
Tj is lower than the ambient temperature
Ta for low values of the power
P. Figure 9 shows that for each value of the power dissipated in the cooled device, there exists an optimal value of the current
Ip at which the junction temperature of the device reaches a minimum. With an increase in the power value, the value of the current
Ip, corresponding to this minimum, increases.
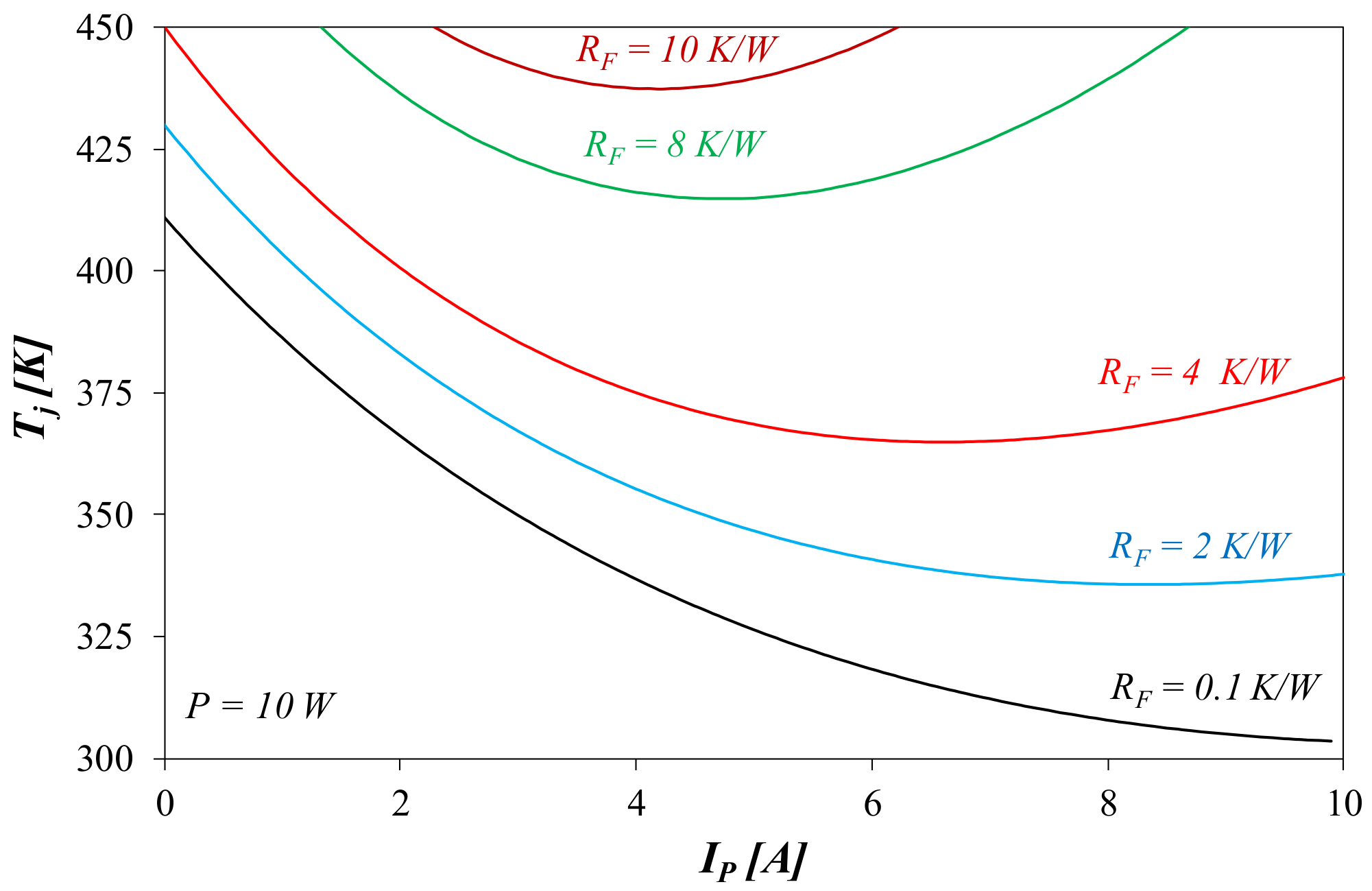
Figure 10 illustrates the influence of the thermal resistance
RF of a heat sink on the cooling efficiency of an electronic component in a considered cooling system. It is clearly observed that an increase in the value of
RF moves the minimum of the relationship
Tj(Ip) to the left. This means that the use of a heat sink with high thermal resistance limits the
Ip current range in which the Peltier effect can improve the cooling process of the electronic component.
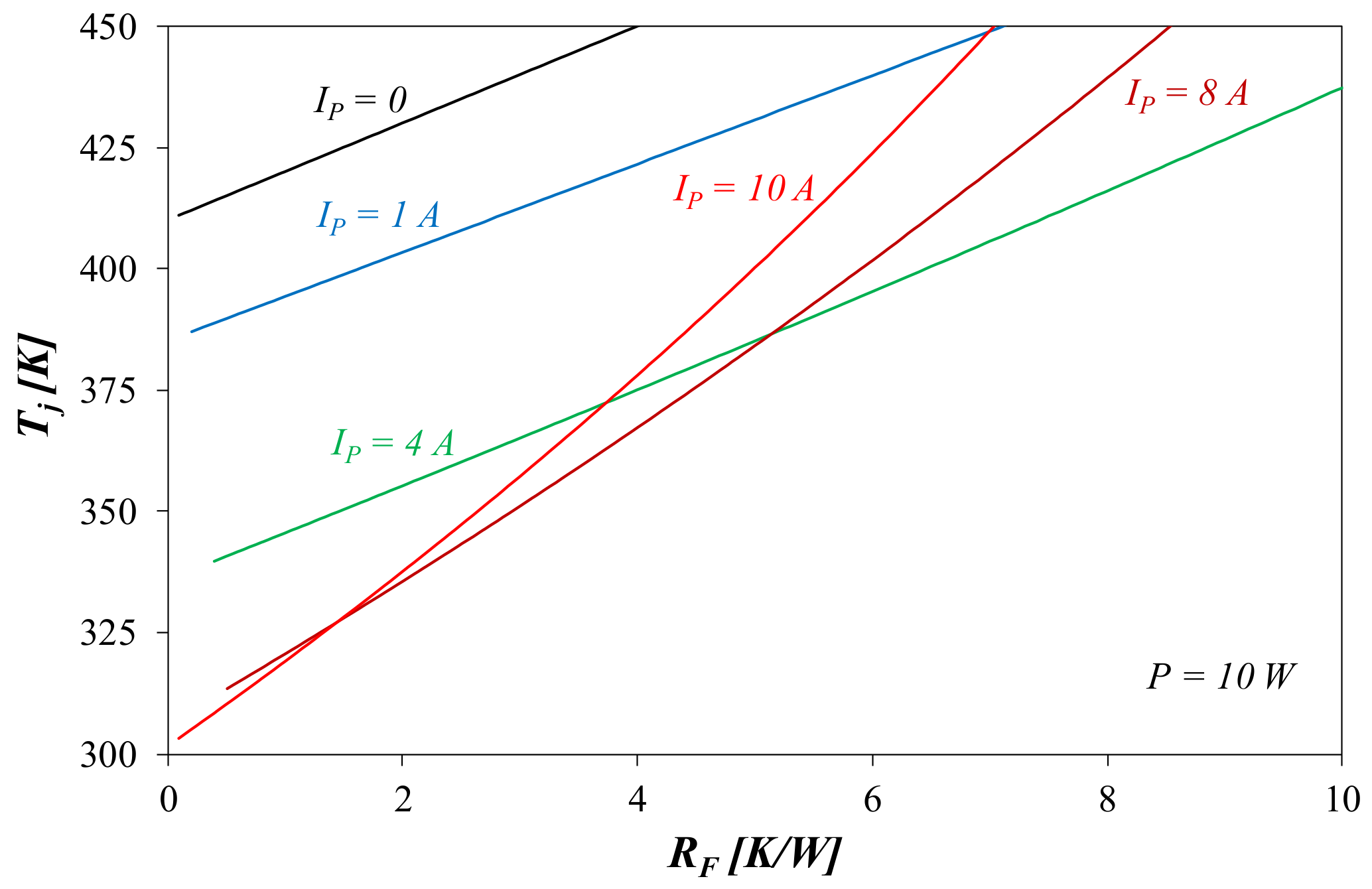
Figure 11 illustrates the influence of the
Ip current on the dependence
Tj(RF) at a fixed value of dissipated power
P. It is easy to observe that for small values of the
Ip current, the considered relationships can be described with linearly increasing functions, the slope of which decreases with an increase in this current. At high values of the
Ip current, the slope of the dependence
Tj(RF) is an increasing function of this current.
All the results of the computer analyses are consistent with the results of theoretical considerations presented in the previous section. Additionally, it is worth underlining that in the paper [
36], many results of measurements of the cooling system containing the Peltier module, a heat sink and a fan are presented. Some of these results present measured dependences of thermal resistance and device internal temperature on the current of the Peltier module. The shape of these dependencies is the same as such results presented in
Figure 10, and they possess a minimum. This agreement between shapes of measured and computed characteristics proves the correctness of the used model of the considered cooling system and the correctness of the performed theoretical considerations.
5. Conclusions
A compact thermal network model has been presented for a Peltier heat pump used for cooling a silicon integrated circuit. Using the dissipated power in the chip as the control parameter, a relation was found, providing the optimal Peltier current in order to keep the chip temperature as low as possible.
Compared with classical methods, the proposed solution does not show any time delays in response to power changes, and it is not sensitive to the position of chip temperature sensors. Moreover, it does not generate chip temperature oscillations.
Consequently, it is possible to increase the operating clock frequency and, as a consequence, an increase in the processor throughput is possible. Finally, the processor is able to operate with maximum efficiency assuming required reliability.
Because a digital processor is a part of the three-component cooling system, the mathematical and physical control process is very simple, effective and possible for implementation in every high-efficiency processor that has to be cooled.
This relation can be included in the design phase of a very high-frequency digital equipment that requires a significant amount of energy for cooling. The proposed value can be useful in the design phase of power electronics, and high-frequency processors need flexible cooling due to the high power densities.
The correctness of the theoretical considerations was confirmed with the use of computations. The shape of the obtained dependences is convergent to the results of measurements presented in the paper [
36]. The conclusions presented in the previous sections may be useful for designers of electronic components cooling systems.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










