
The Embedded System to Control the Illuminance of an Office Workplace with LED Light Sources




Abstract
:1. Introduction
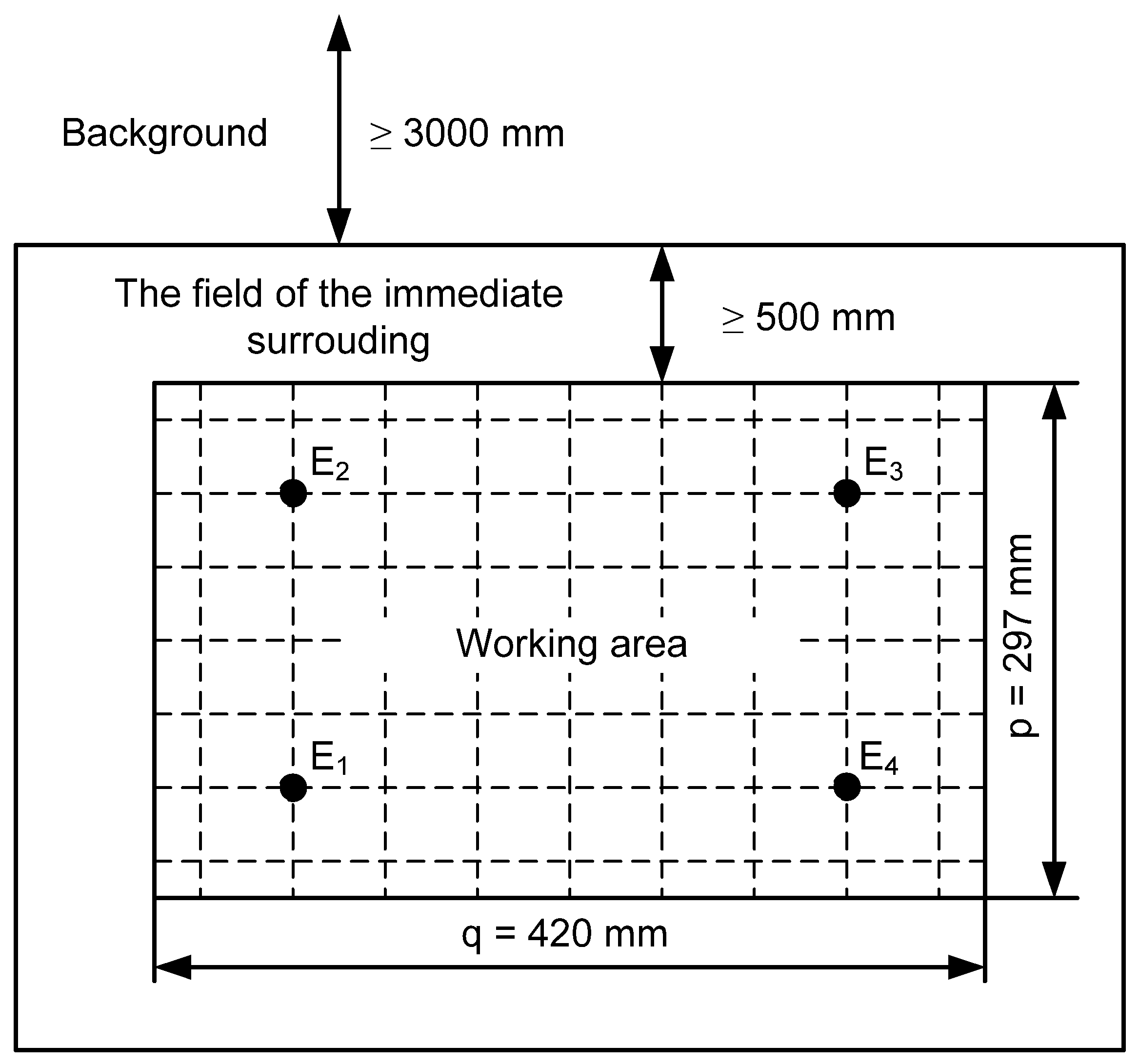
2. Legal Regulations Regarding Workplace Illuminance
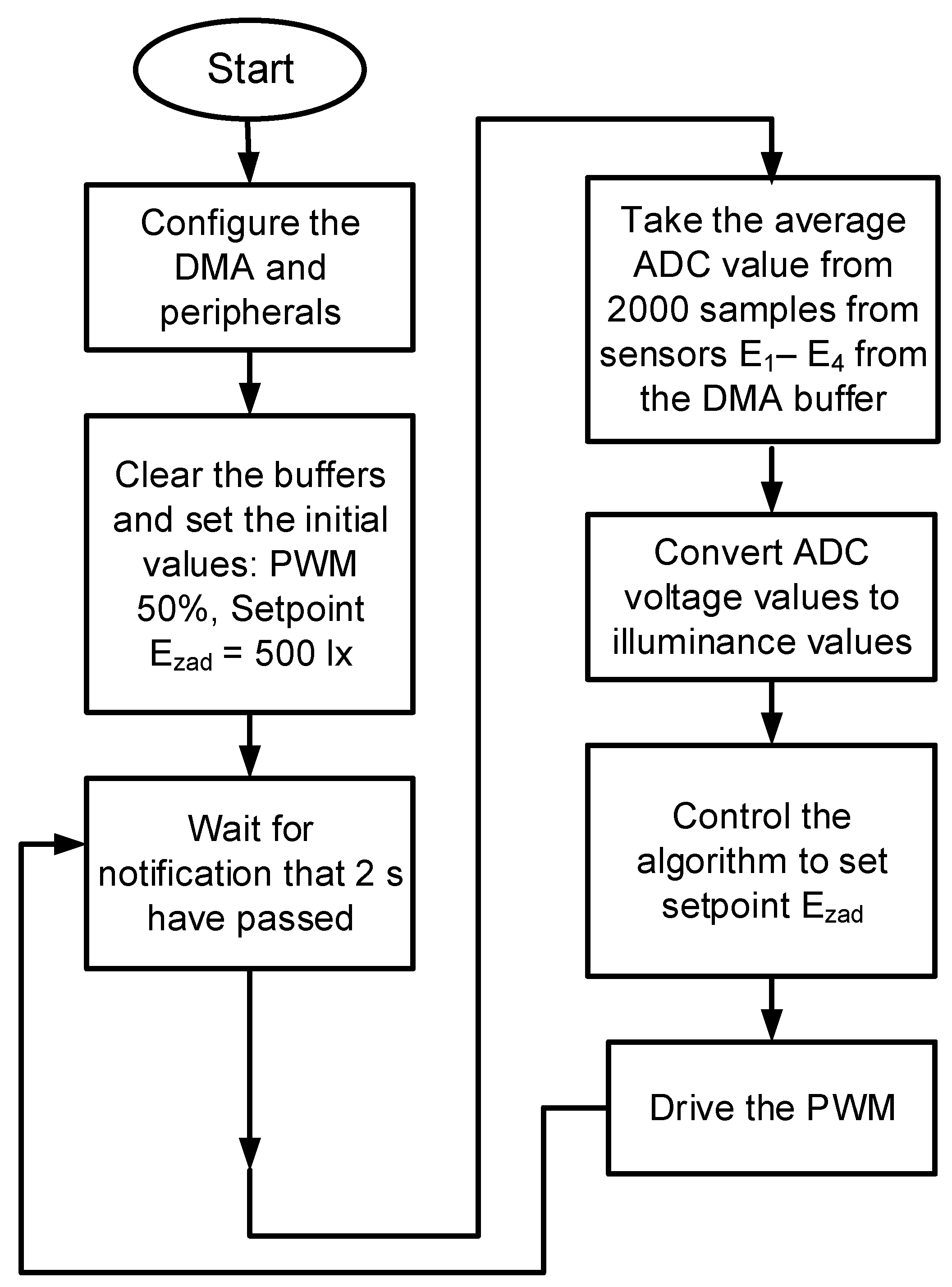
3. Investigated Lighting Control System
4. Investigation Results
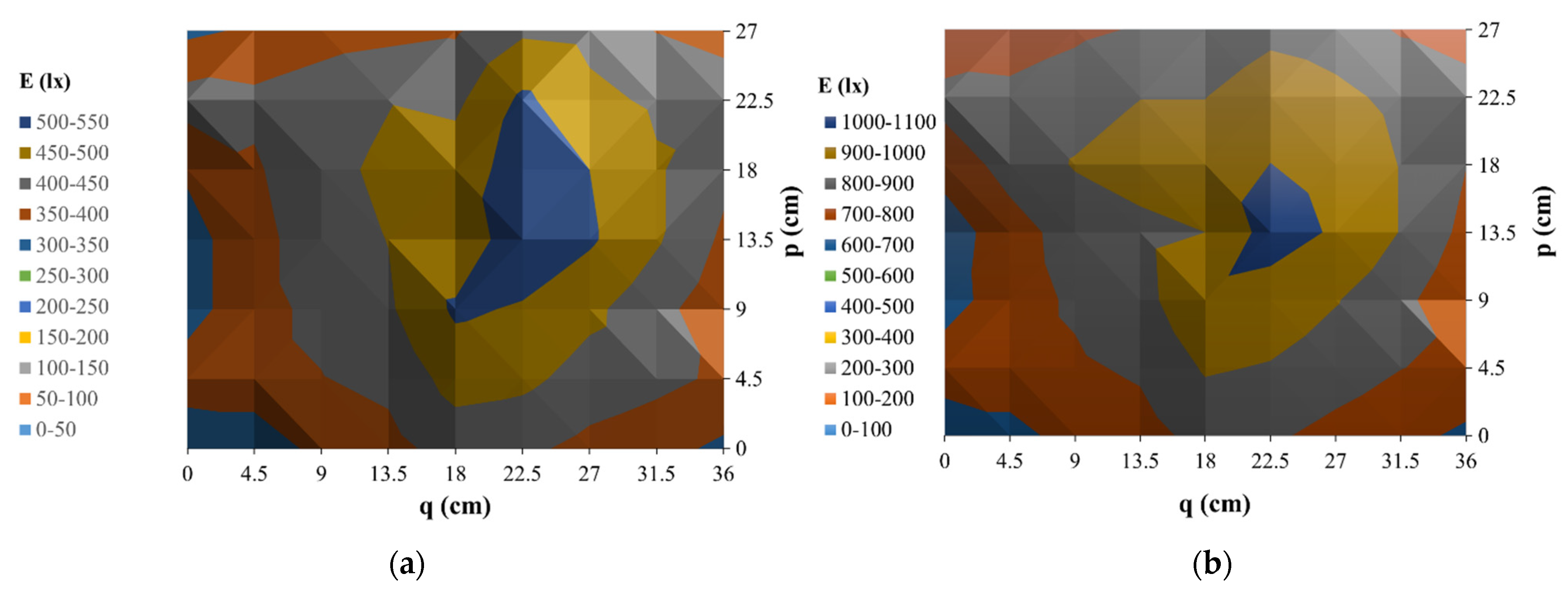
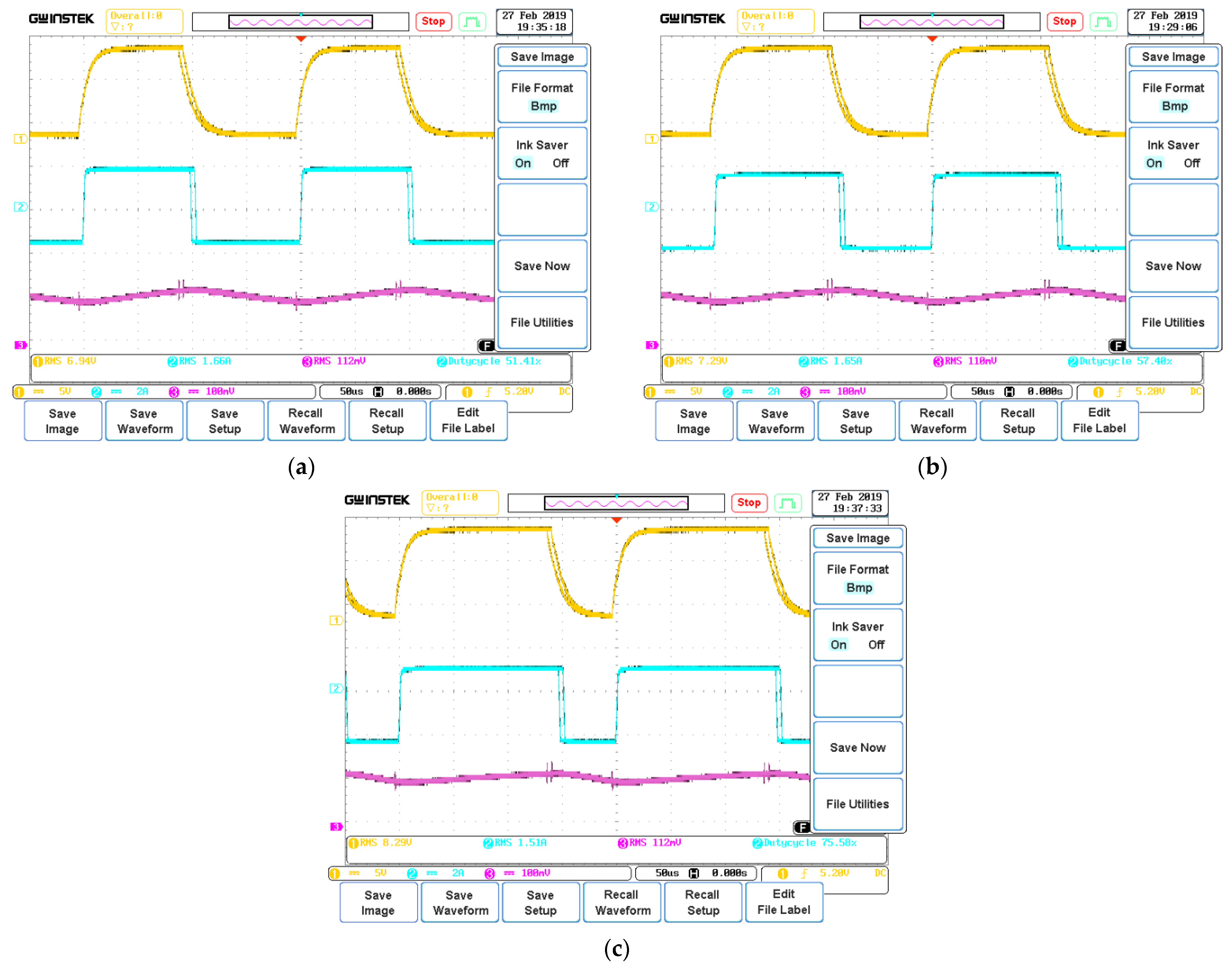
4.1. Investigations of the System with the Open Feedback Loop
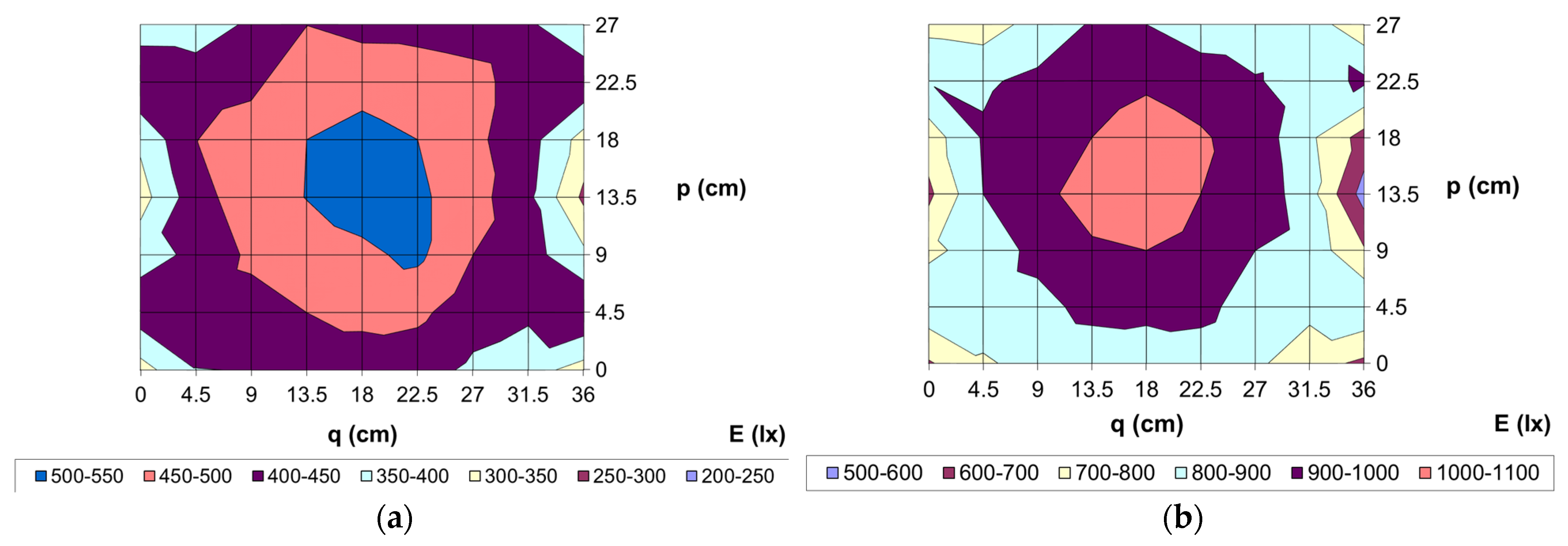
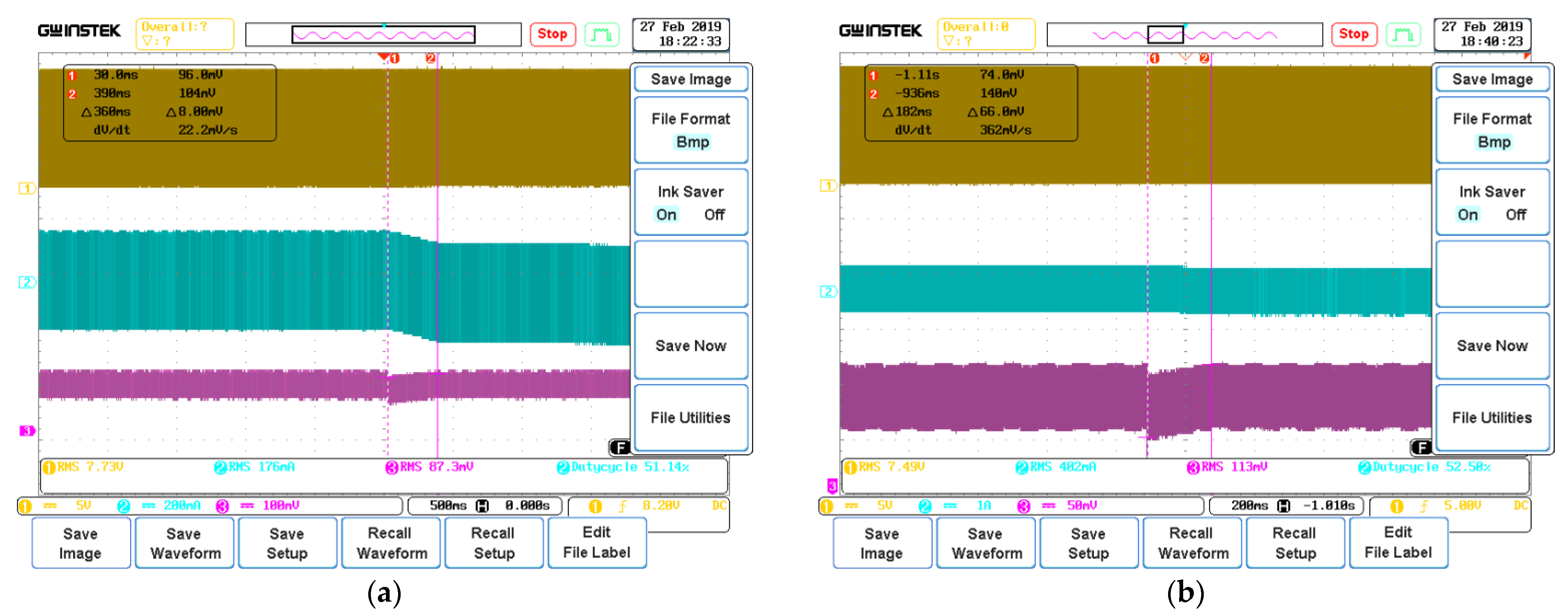
4.2. Investigations of the System with the Closed Feedback Loop
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- PN-EN 12464-1:2022-01; Light and Lighting. Lighting of Workplaces, Part 1: Interior Workplaces. Official Journal of the European Union: Luxembourg, 2015.
- Schubert, E.F. Light Emitting Diodes, 3rd ed.; Rensselaer Polytechnic Institute: Troy, NY, USA, 2018. [Google Scholar]
- Lasance, C.J.M.; Poppe, A. Thermal Management for LED Applications; Springer: Dordrecht, The Netherlands, 2014. [Google Scholar]
- Smith, W.J. Modern Optical Engineering: The Design of Optical Systems, 4th ed.; McGraw Hill: New York, NY, USA, 2008. [Google Scholar]
- Górecki, K.; Ptak, P. Modelling LED lamps with thermal phenomena taken into account. Microelectron. Reliab. 2017, 79, 440–447. [Google Scholar] [CrossRef]
- Winder, S. Power Supplies for LED Driving, 2nd ed.; Elsevier BV: Aalborg, Denmark, 2017. [Google Scholar]
- Ptak, P.; Górecki, K.; Wnuczko, S. Embedded system to control lighting of the office workplace. Przegląd Elektrotechniczny 2018, 94, 76–79. [Google Scholar]
- Afshari, S.; Mishra, S. A Plug-and-Play realization of decentralized feedback control for smart lighting systems. IEEE Trans. Control Syst. Technol. 2016, 24, 1317–1327. [Google Scholar] [CrossRef]
- Chew, I.; Kalavally, V.; Pin Tan, C.; Parkkinen, J. A Spectrally tunable smart LED lighting system with closed-loop control. IEEE Sens. J. 2016, 16, 4452–4459. [Google Scholar] [CrossRef]
- Fleck, J.L.; Cassandras, C.G.; Geng, Y. Adaptive quasi-dynamic traffic light control. IEEE Trans. Control Syst. Technol. 2016, 24, 830–842. [Google Scholar] [CrossRef]
- Nam, T.P.; Van Doai, N. Application of inteligent lighting control for street lighting system. In Proceedings of the International Conference on System Science and Engineering (ICSSE), Dong Hoi, Vietnam, 20–21 July 2019; pp. 53–56. [Google Scholar]
- Hsia, S.C.; Sheu, M.H.; Ciou, J.J. Cost-effective LED dimming driver with single chip design for smart lighting system. IEEE Access 2020, 8, 141025–141032. [Google Scholar] [CrossRef]
- Boscarino, G.; Moallem, M. Daylighting control and simulation for LED-based energy-efficient lighting systems. IEEE Trans. Ind. Inform. 2016, 12, 301–309. [Google Scholar] [CrossRef]
- Pandharipande, A.; Caicedo, D.; Wang, X. Sensor-driven wireless lighting control: System solutions and services for intelligent buildings. IEEE Sens. J. 2014, 14, 4207–4215. [Google Scholar] [CrossRef]
- Apostolidou, N.; Valsamas, F.; Baros, D.; Loupis, M.; Dasteridis, V.; Kokkinis, C. Innovative Energy-recovery unit for the LED-lighting system of heavy-duty vehicles. Clean Technol. 2021, 3, 581–593. [Google Scholar] [CrossRef]
- Qin, L.; Pena-Garcia, A.; Leon, A.S.; Yu, J.C. Comparative study of Energy savings for various control strategies in the tunel lighting system. Appl. Sci. 2021, 11, 6372. [Google Scholar] [CrossRef]
- Plorer, D.; Hammes, S.; Hauer, M.; Van Karsbergen, V.; Pfluger, R. Control strategies for daylight and artificial lighting in office buildings-a bibliometrically assisted review. Energies 2021, 14, 3852. [Google Scholar] [CrossRef]
- Haus, J. Optical Sensors. Basics and Applications; Wiley-VCH Verlag: Veinheim, Germany, 2010. [Google Scholar]
- Ptak, P.; Górecki, K.; Gensikowski, M. Comparison of dynamic properties of the selected photometric sensors. Przegląd Elektrotechniczny 2020, 96, 110–114. [Google Scholar]
- Deng-feng, L.; Yun-ting, B.; He, W.; Hu, L. Design of intelligent lighting control system. In Proceedings of the 2011 IEEE International Conference on Cyber Technology in Automation, Control and Intelligent Systems, Kunming, China, 20–23 March 2011; pp. 134–137. [Google Scholar]
- Chiradeja, P.; Yoomak, S.; Ngaopitakkul, A. Economic analysis of improving the Energy efficiency of nanogrid solar road lighting using adaptive lighting control. IEEE Access 2020, 8, 202623–202638. [Google Scholar] [CrossRef]
- Shahzad, G.; Yang, H.; Ahmad, A.W.; Lee, C. Energy-efficient intelligent street lighting system using traffic-adaptive control. IEEE Sens. J. 2016, 16, 5397–5405. [Google Scholar] [CrossRef]
- Jiang, J.; Mohagheghi, A.; Moallem, M. Energy-efficient supplemental LED lighting control for a proof-of-concept greenhouse system. IEEE Trans. Ind. Electron. 2020, 67, 3033–3042. [Google Scholar] [CrossRef]
- Martirano, L.; Ruvio, A.; Manganelli, M.; Lettina, F.; Venditti, A.; Zori, G. High-efficiency lighting systems with advanced controls. IEEE Trans. Ind. Appl. 2021, 57, 3406–3415. [Google Scholar] [CrossRef]
- Bo, F.; Zhengming, Z.; Yingchao, Z.; Dejia, Z.; Liqiang, Y. Intelligent controller for LEDs lighting systems supplied by batteries. In Proceedings of the IEEE Vehicle Power and Propulsion Conference (VPPC), Harbin, China, 3–5 September 2008. [Google Scholar]
- Mohagheghi, A.; Moallem, M. Intelligent spectrum controlled supplemental lighting for daylight harvesting. IEEE Trans. Ind. Inform. 2021, 17, 3263–3272. [Google Scholar] [CrossRef]
- Pellegrino, A.; Lo Verso, V.R.M.; Blaso, L.; Acquaviva, A.; Patti, E.; Odello, A. Lighting control and monitoring for energy efficiency: A case study focused on the interoperability of building management systems. IEEE Trans. Ind. Appl. 2016, 52, 2627–2637. [Google Scholar] [CrossRef] [Green Version]
- Gao, J.; Luo, J.; Xu, A.; Yu, J. Light intensity intelligent control system research and design based on automobile sun visor of BH1750. In Proceedings of the 29th IEEE Chinese Control And Decision Conference (CCDC), Chongqing, China, 28–30 May 2017. [Google Scholar] [CrossRef]
- Meng-Shiuan, P.; Lun-Wu, Y.; Yen-Ann, C.; Yu-Hsuan, L.; Yu-Chee, T. A WSN-based intelligent light control system considering user activities and profiles. IEEE Sens. J. 2008, 8, 1710–1721. [Google Scholar]
- Wong, C.P.G.; Lee, A.T.L.; Li, K.; Tan, S.C.; Hui, S.Y. Precise luminous flux and color control of dimmable red-green-blue light-emitting diode systems. IEEE Trans. Power Electron. 2022, 37, 588–606. [Google Scholar] [CrossRef]
- Lee, C.T.; Chen, L.B.; Chu, H.M.; Hsieh, C.J.; Liang, W.C. An internet of things (IoT)-based master-slave regionalized intelligent LED-light-controlling system. Appl. Sci. 2022, 12, 420. [Google Scholar] [CrossRef]
- Górecki, P.; Górecki, K. Measurements and computations of internal temperatures of the IGBT and the diode situated in the common case. Electronics 2021, 10, 210. [Google Scholar] [CrossRef]
- Pietruszka, A.; Górecki, P.; Wroński, S.; Illes, B.; Skwarek, A. The influence of soldering profile on the thermal parameters of insulated gate bipolar transistors (IGBTs). Appl. Sci. 2021, 11, 5583. [Google Scholar] [CrossRef]
- Skwarek, A.; Ptak, P.; Górecki, K.; Hurtony, T.; Illes, B. Microstructure influence of SACX0307-TiO2 composite solder joints on thermal properties of power LED assemblies. Materials 2020, 13, 1563. [Google Scholar] [CrossRef]
- Skwarek, A.; Krammer, O.; Hurtony, T.; Ptak, P.; Górecki, K.; Wroński, S.; Straubinger, D.; Witek, K.; Illes, B. Application of ZnO nanoparticles in Sn99Ag0.3Cu0.7-based composite solder alloys. Nanomaterials 2021, 11, 1545. [Google Scholar] [CrossRef]
- Wiśniewski, A. The calculation of energy saving in use light management systems. In Proceedings of the VII Lighting Conference of the Visegrad Countries (Lumen V4), Trebic, Czech, 18–20 September 2018. [Google Scholar]
- Janicki, M.; Torzewicz, T.; Samson, A.; Raszkowski, T.; Napieralski, A. Experimental identification of LED compact thermal model element values. Microelectron. Reliab. 2018, 86, 20–26. [Google Scholar] [CrossRef]
- Górecki, K.; Ptak, P. New dynamic electro-thermo-optical model of power LEDs. Microelectron. Reliab. 2018, 91, 1–7. [Google Scholar] [CrossRef]
- Posobkiewicz, K.; Górecki, K. Influence of selected factors on thermal parameters of the components of forced cooling systems of electronic devices. Electronics 2021, 10, 340. [Google Scholar] [CrossRef]
- Górecki, K.; Ptak, P.; Torzewicz, T.; Janicki, M. Influence of a thermal pad on selected parameters of power LEDs. Energies 2020, 13, 3732. [Google Scholar] [CrossRef]
- Rozporządzenie Ministra Pracy i Polityki Socjalnej z Dnia 26 Września 1997r. w Sprawie Ogólnych Przepisów Bezpieczeństwa i Higieny Pracy. Dz.U. 2003, nr 169, poz. 1650 ze zm. Available online: http://www.przepisy-bhp.abc.com.pl/akt1/-/akt/dz-u-2003-169-1650-t-j--u (accessed on 15 January 2022).
- PN-EN 12464-1: 2011; Light and Lighting. Lighting of Work Places. Part 1: Indoor Work Places. BSI: London, UK, 2011.
- Xlamp XM-L2. Available online: https://cree-led.com/media/documents/XLampXML2.pdf (accessed on 15 January 2022).
- Pawlak, A. Nowe wymagania w projekcie europejskiej normy oświetleniowej. Bezpieczeństwo Pr. 2010, 10, 22–25. [Google Scholar]
- Wymagania Oświetleniowe w Ocenie Ryzyka Zawodowego na Stanowisku Pracy, w: J. Cahrynowicz (red.), Wybrane Kierunki Badań Ergonomicznych w 2009 Roku; Wydawnictwo Polskiego Towarzystwa Ergonomicznego PTErg, Oddział we Wrocławiu: Wrocław, Poland, 2009.
- CIE 17.4:1987; International Lighting Vocabulary. International Commission on Illuminance (CIE): Austria, Vienna, 1964.
- CIE 97.2:2005; Guide on the Maintenance of Indoor Electric Lighting Systems. International Commission on Illuminance (CIE): Austria, Vienna.
- PN-EN 12665:2011; Light and Lighting. Basic Terms and Criteria for Specifying Lighting Requirements. BSI: London, UK, 2011.
- Górecki, K.; Zarębski, J. Pomiary Elementów i Układów Elektronicznych; Akademia Morska w Gdyni: Gdynia, Poland, 2009. [Google Scholar]
- PN-EN 12464-2:2014-05; Light and Lighting. Lighting of Workplaces, Part 2: Outdoor Workplaces. BSI: London, UK, 2014.
- Microcontroller STM32L475VGT6. Available online: http://www.st.com/en/microcontrollers/stm32l475vg.html (accessed on 15 January 2022).
- CNY17-4 Optocoupler Application Note. Available online: https://www.vishay.com/docs/83606/cny17.pdf (accessed on 15 January 2022).
- MCP1405 Gate Driver. Available online: http://ww1.microchip.com/downloads/en/DeviceDoc/22022b.pdf (accessed on 15 January 2022).
- TEMT6000 Light Sensor. Available online: https://www.vishay.com/docs/81579/temt6000.pdf (accessed on 15 January 2022).
- Xlamp X-RE. Available online: https://cree-led.com/media/documents/ds-XRE.pdf (accessed on 15 January 2022).
- Luxmeter L200. Available online: https://www.sonopan.com.pl/pl/produkty/swiatlo/luksomierz-precyzyjny-l-200/ (accessed on 15 January 2022).
- Górecki, K.; Ptak, P.; Bruski, Ł. Spatial radiation patterns of selected solid state light sources. In Proceedings of the 28th International Conference “Mixed Design of Integrated Circuits and Systems”, Łódź, Poland, 24–26 June 2021; pp. 222–227. [Google Scholar]
- Oscilloscope GWInstek GD2104A. Available online: https://www.tme.eu/Document/e0c261d2fc8307355c1e262c24577391/INB-OSC-EN.pdf (accessed on 15 January 2022).
- Current Probe TCPA300. Available online: https://download.tek.com/manual/071118303.pdf (accessed on 15 January 2022).
- Xlamp XPG2. Available online: https://cree-led.com/media/documents/XLampXPG2.pdf (accessed on 15 January 2022).
- Fideltronik Company. Available online: http://fideltronik.com.pl (accessed on 15 January 2022).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| δ | x (m) | N |
|---|---|---|
| 0.4 | 0.15 | 3 |
| 0.6 | 0.2 | 3 |
| 1 | 0.2 | 5 |
| 2 | 0.3 | 6 |
| 5 | 0.6 | 8 |
| 10 | 1 | 10 |
| 25 | 2 | 12 |
| 50 | 3 | 17 |
| 100 | 5 | 20 |
| Parameter | Symbol | Value | |
|---|---|---|---|
| Electrical power | Ptot | 100 | mW |
| Maximum junction temperature | Tj | 100 | °C |
| Thermal resistance junction-ambient | Rthj-a | 450 | K/W |
| Half sensitivity angle | ϕ | ±60 | ° |
| Spectral sensitivity range | λp | 360 to 970 | nm |
| Maximum voltage collector–emitter | VCEmax | 6 | V |
| Maximum collector current | ICmax | 20 | mA |
| Middle wavelength | λnom | 570 | nm |
| Operating frequency range | f | 10 to 100 | kHz |
| LED | XML-B2 | Ring XRE Module | |||
|---|---|---|---|---|---|
| Ezad (lx) | 500 | 1000 | 500 | 750 | 1000 |
| I (A) | 0.804 | 1.875 | 0.25 | 0.42 | 0.66 |
| Eśr (lx) | 429.2 | 869.7 | 417.7 | 670.1 | 829.1 |
| Emin (lx) | 289 | 558 | 314 | 521 | 633 |
| δ | 0.673 | 0.642 | 0.763 | 0.778 | 0.752 |
| Ezad (lx) | 750 | 500 | |||
|---|---|---|---|---|---|
| Ezew (lx) | 0 | 100 | 200 | 100 | 200 |
| ID (A) | 2.54 | 1.99 | 1.7 | 0.978 | 0.719 |
| PD (W) | 8.79 | 6.29 | 5.19 | 2.86 | 1.97 |
| VOUT (mV) | 110 | 110 | 112 | 78.9 | 81.9 |
| d (%) | 75.58 | 57.4 | 49.38 | 65.53 | 47.58 |
| Ezad (lx) | 750 | 500 | ||
|---|---|---|---|---|
| Ezew (lx) | 100 | 200 | 100 | 200 |
| ID (A) | 0.48 | 0.372 | 0.22 | 0.171 |
| PD (W) | 9.37 | 5.63 | 3.53 | 2.56 |
| VOUT (mV) | 109 | 110 | 82.7 | 82.6 |
| d (%) | 59.9 | 49.7 | 68.26 | 48.93 |
| Case 1 | Case 2 | Case 3 | Case 4 | Case 5 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Point Light Source | Ring XRE Module | Ring XRE Module | XML-B2 LED | XML-B2 LED | XML-B2 LED | |||||
| Ezad (lx) | 500 | 750 | 500 | 750 | 750 | |||||
| Ezew (lx) | 200 | 100 | 200 | 100 | 200 | 100 | 200 | 100 | 200 | 0 |
| d (%) | 48.93 | 68.26 | 49.7 | 59.9 | 47.58 | 65.63 | 49.38 | 57.4 | 51.41 | 75.58 |
| time to adjust the system (s) | 0.36 | 0.182 | 0.505 | 0.215 | 0.675 | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Górecki, K.; Ptak, P.; Wnuczko, S. The Embedded System to Control the Illuminance of an Office Workplace with LED Light Sources. Energies 2022, 15, 2406. https://doi.org/10.3390/en15072406
Górecki K, Ptak P, Wnuczko S. The Embedded System to Control the Illuminance of an Office Workplace with LED Light Sources. Energies. 2022; 15(7):2406. https://doi.org/10.3390/en15072406
Chicago/Turabian StyleGórecki, Krzysztof, Przemysław Ptak, and Sylwia Wnuczko. 2022. "The Embedded System to Control the Illuminance of an Office Workplace with LED Light Sources" Energies 15, no. 7: 2406. https://doi.org/10.3390/en15072406
APA StyleGórecki, K., Ptak, P., & Wnuczko, S. (2022). The Embedded System to Control the Illuminance of an Office Workplace with LED Light Sources. Energies, 15(7), 2406. https://doi.org/10.3390/en15072406