
SOC Balancing and Coordinated Control Based on Adaptive Droop Coefficient Algorithm for Energy Storage Units in DC Microgrid


Abstract
:1. Introduction
- (1)
- The droop coefficient of ESUs with higher/lower SOC under discharge/charge is regulated to a minimum value in the case of a significant SOC deviation. SOCs can be balanced quickly;
- (2)
- The droop coefficient is automatically adjusted by the fuzzy logic algorithm to accurately balance SOC in the case of a slight SOC deviation;
- (3)
- The DC bus voltage recovery control is adopted to eliminate the voltage error caused by the traditional droop control, realizing automatic recovery control of the bus voltage;
- (4)
- To ensure the power balance and stabilize the bus voltage, the energy coordinated management strategy based on SOC balancing of the DC microgrid has been adopted.
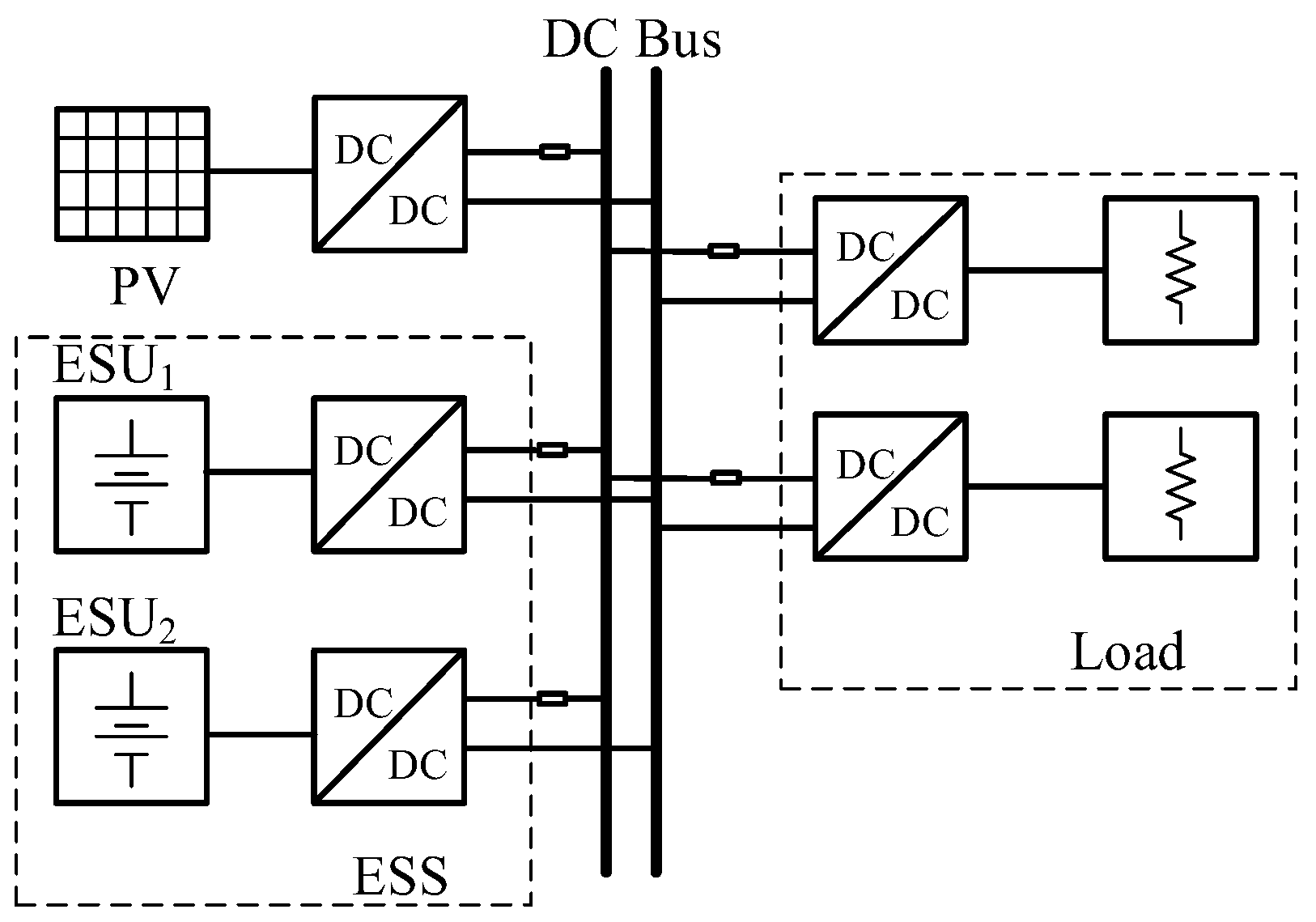
2. Analysis of the SOC Unbalance
3. The SOC Balancing Strategy Based on Adaptive Droop Coefficient Algorithm
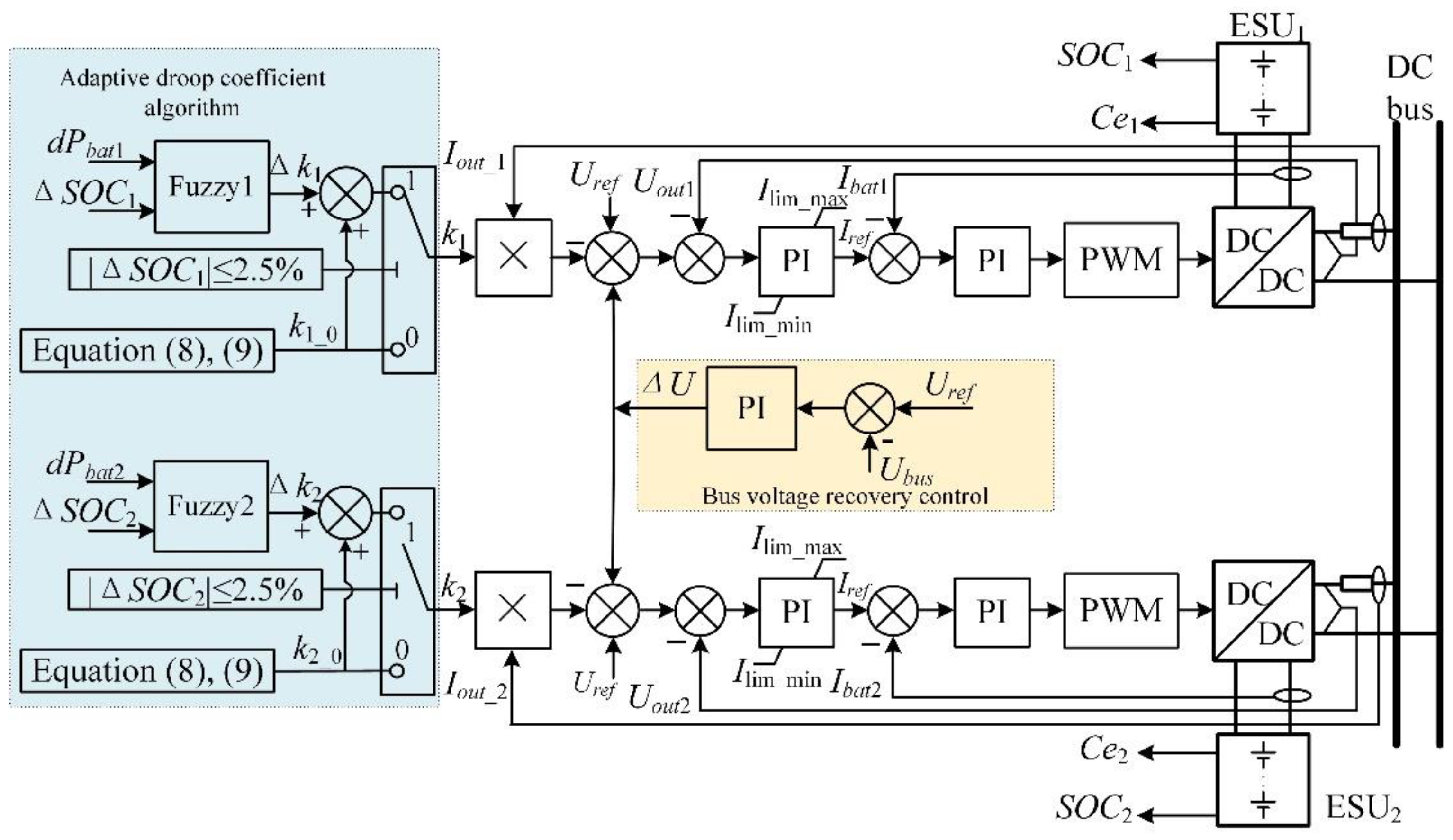
3.1. The Adaptive Droop Coefficient Algorithm
- (1)
- |∆SOCi|>2.5%
- (2)
- |∆SOCi| ≤ 2.5%
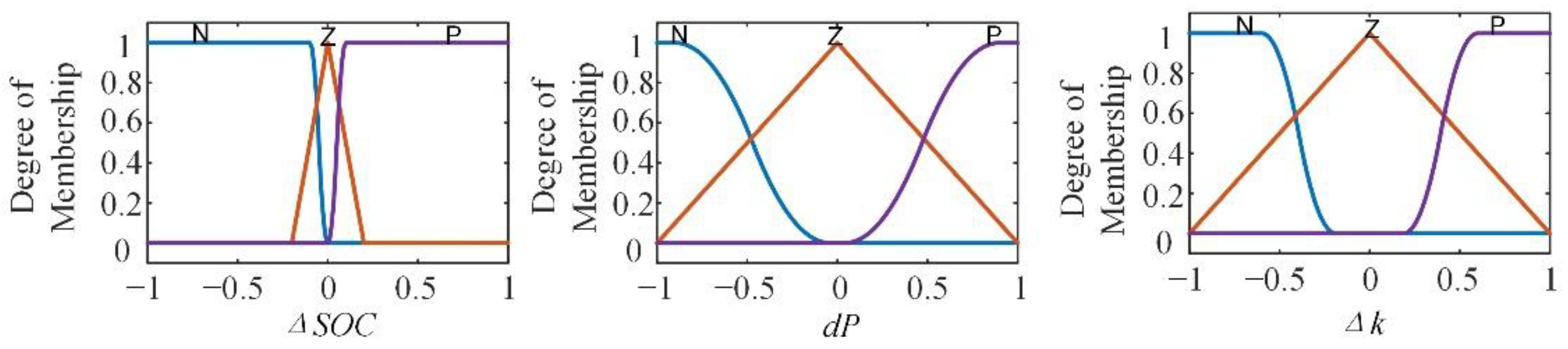
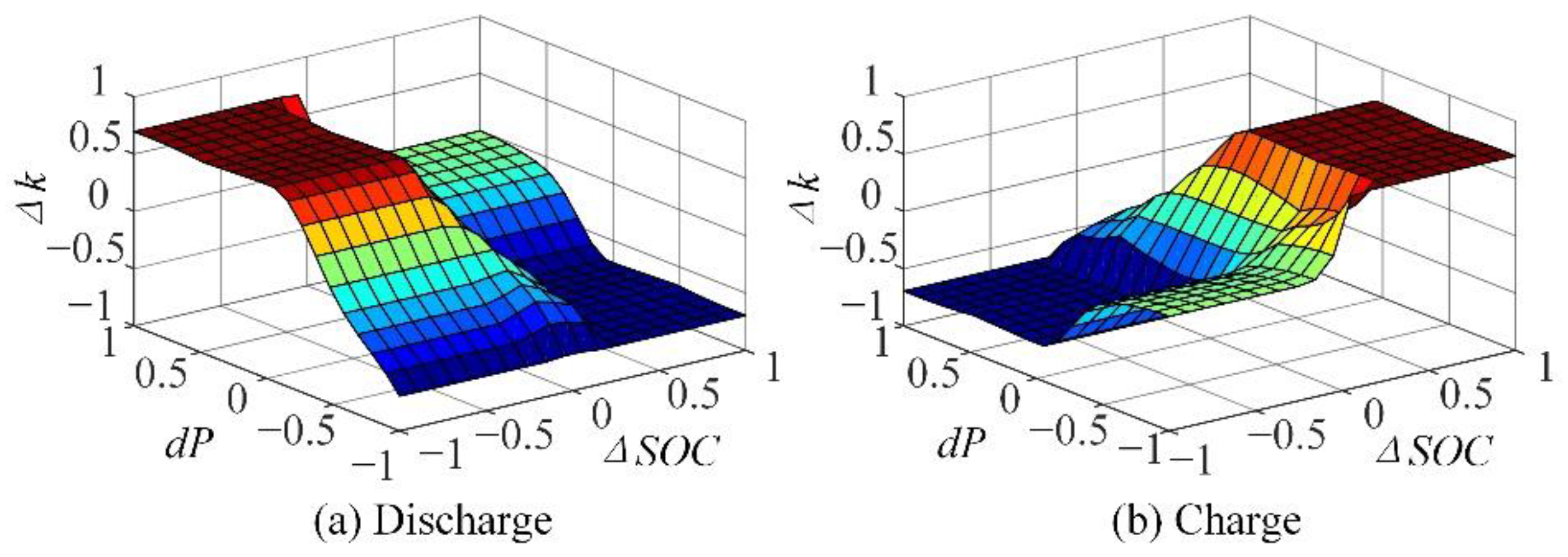
3.2. Design of the Fuzzy Logic Algorithm
3.3. Bus Voltage Recovery Control
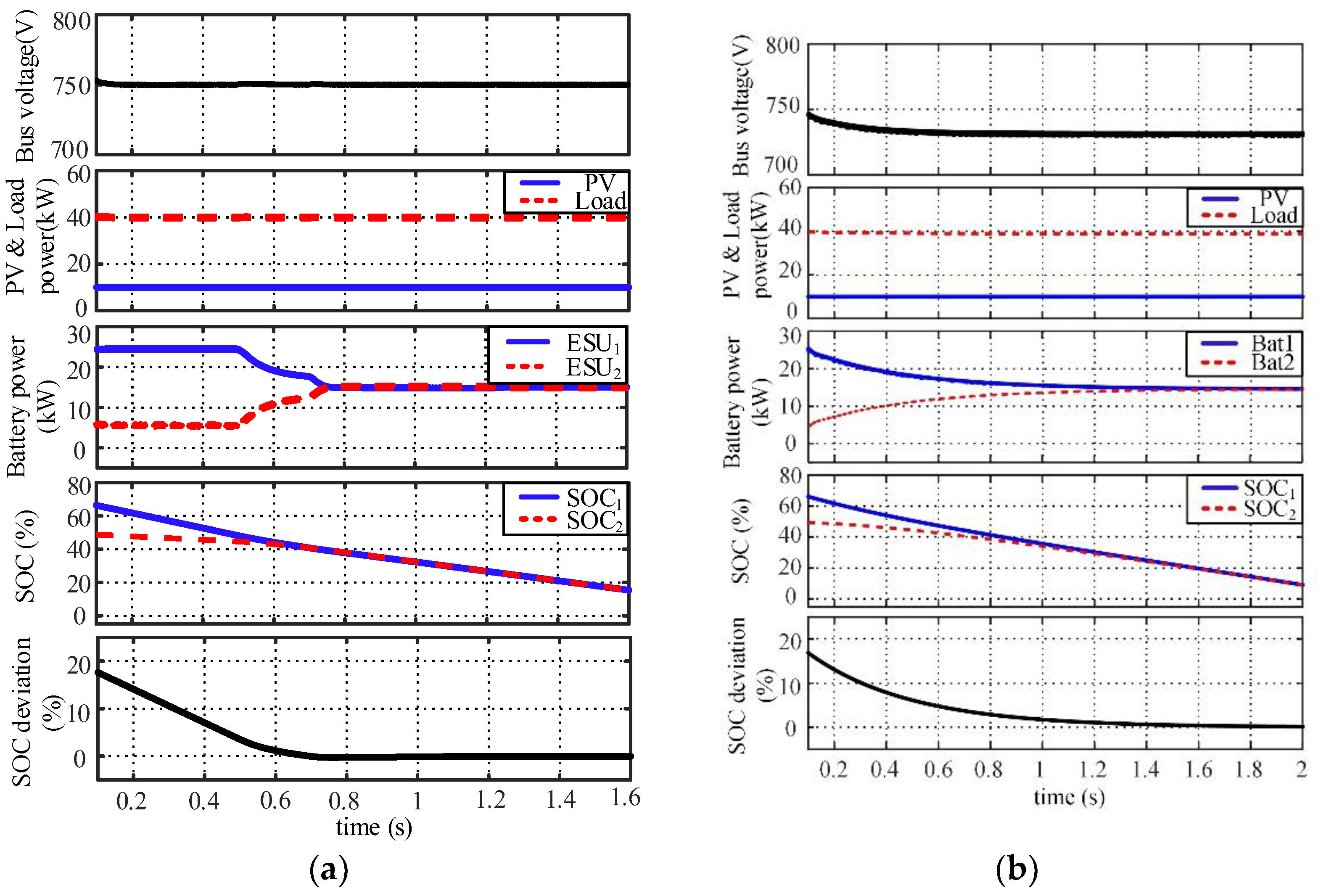
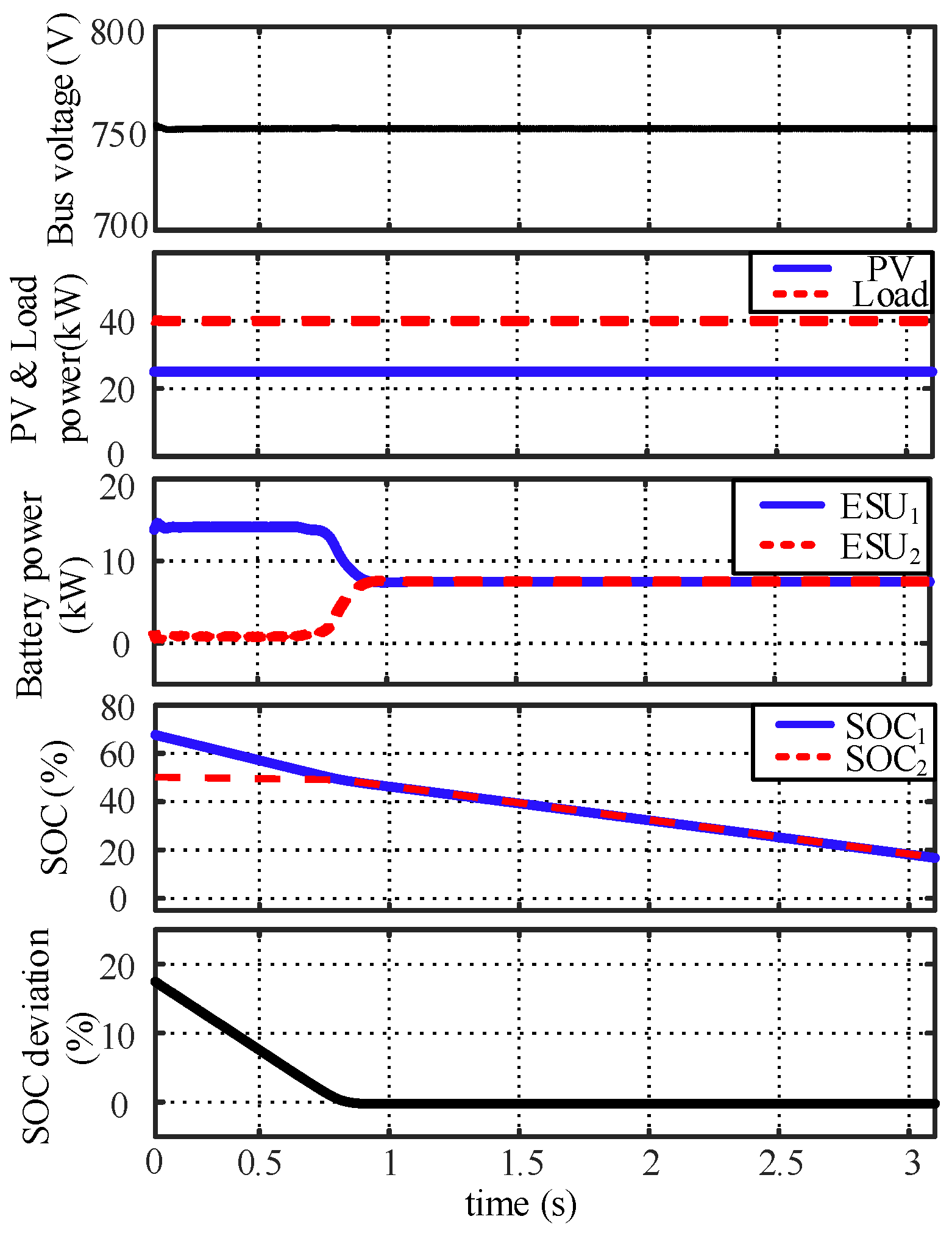
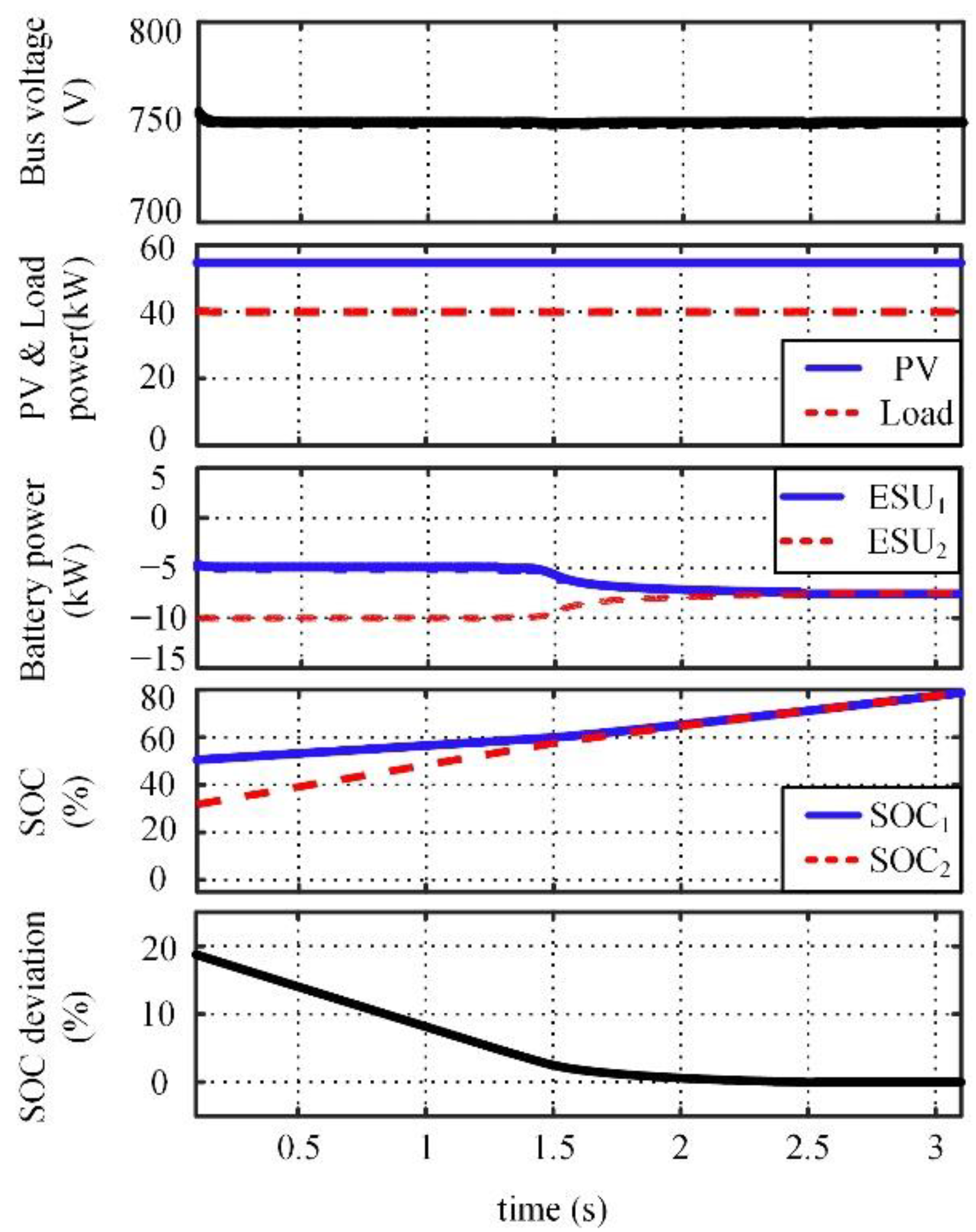
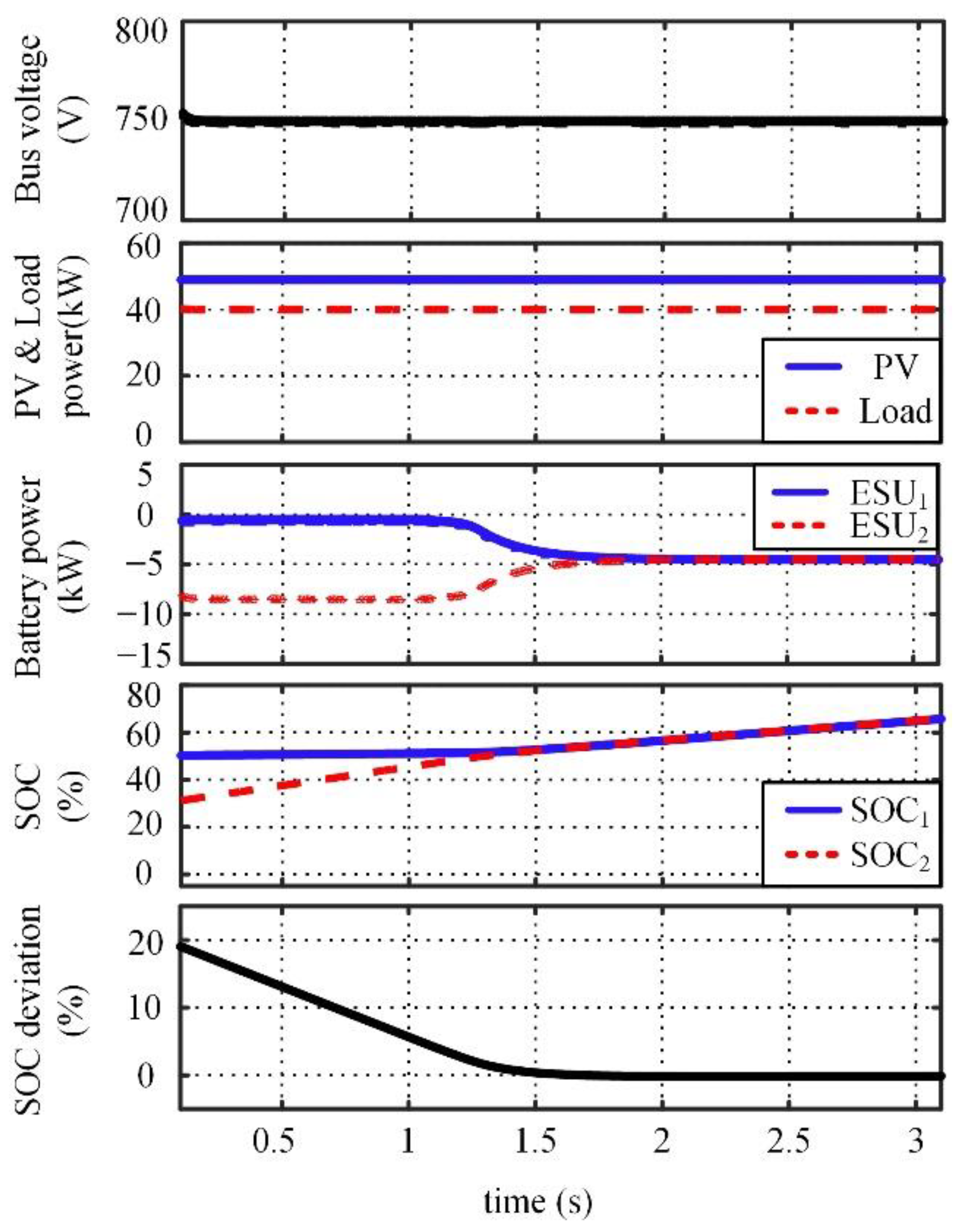
3.4. Simulation Waveforms of SOC Balancing Control
- (1)
- ESU-discharging waveforms
- (2)
- ESU-charging waveforms
4. Coordinated Control Based on the Piecewise Adaptive Algorithm
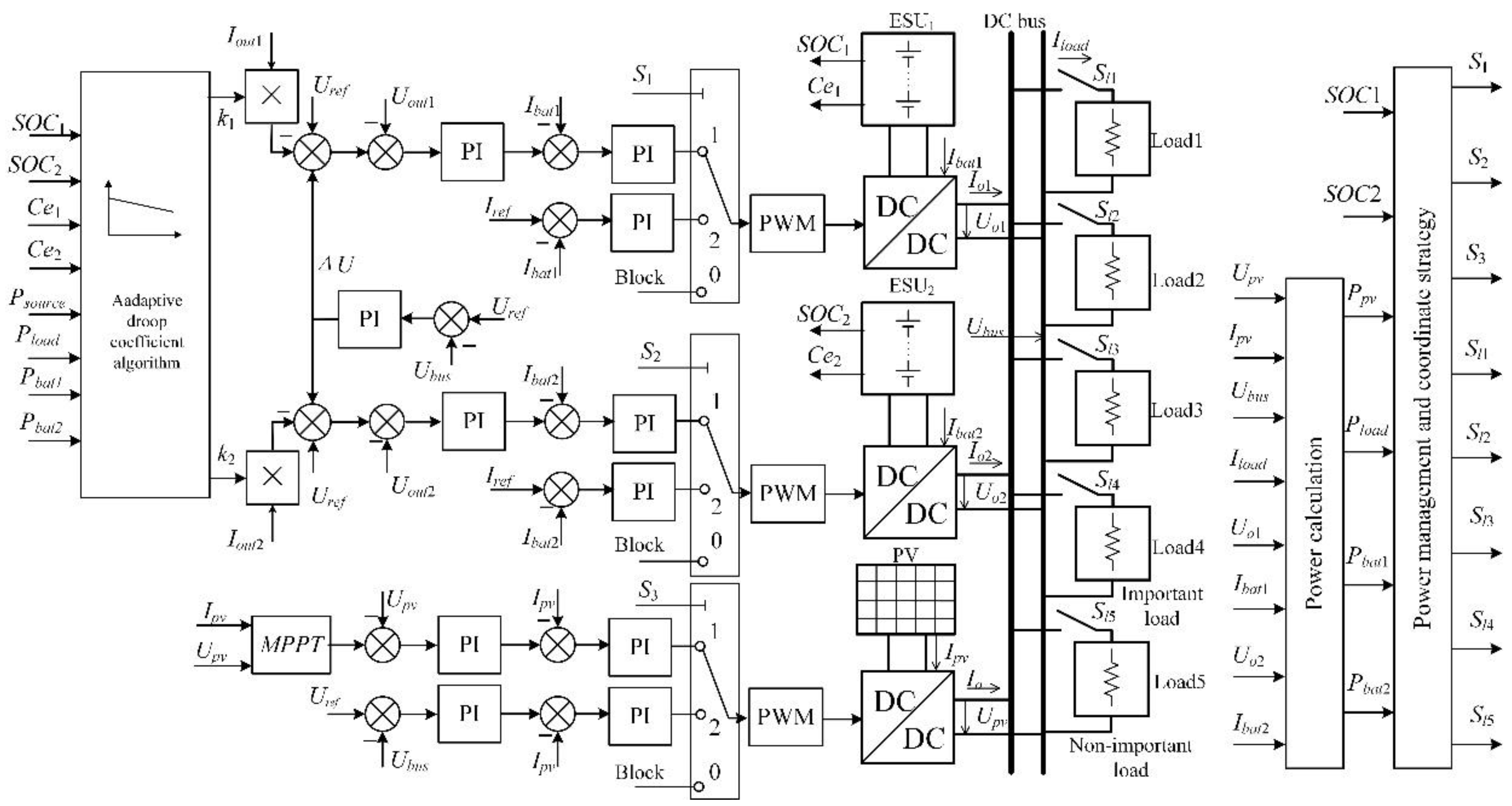
4.1. Coordinated Control Diagram of DC Microgrid
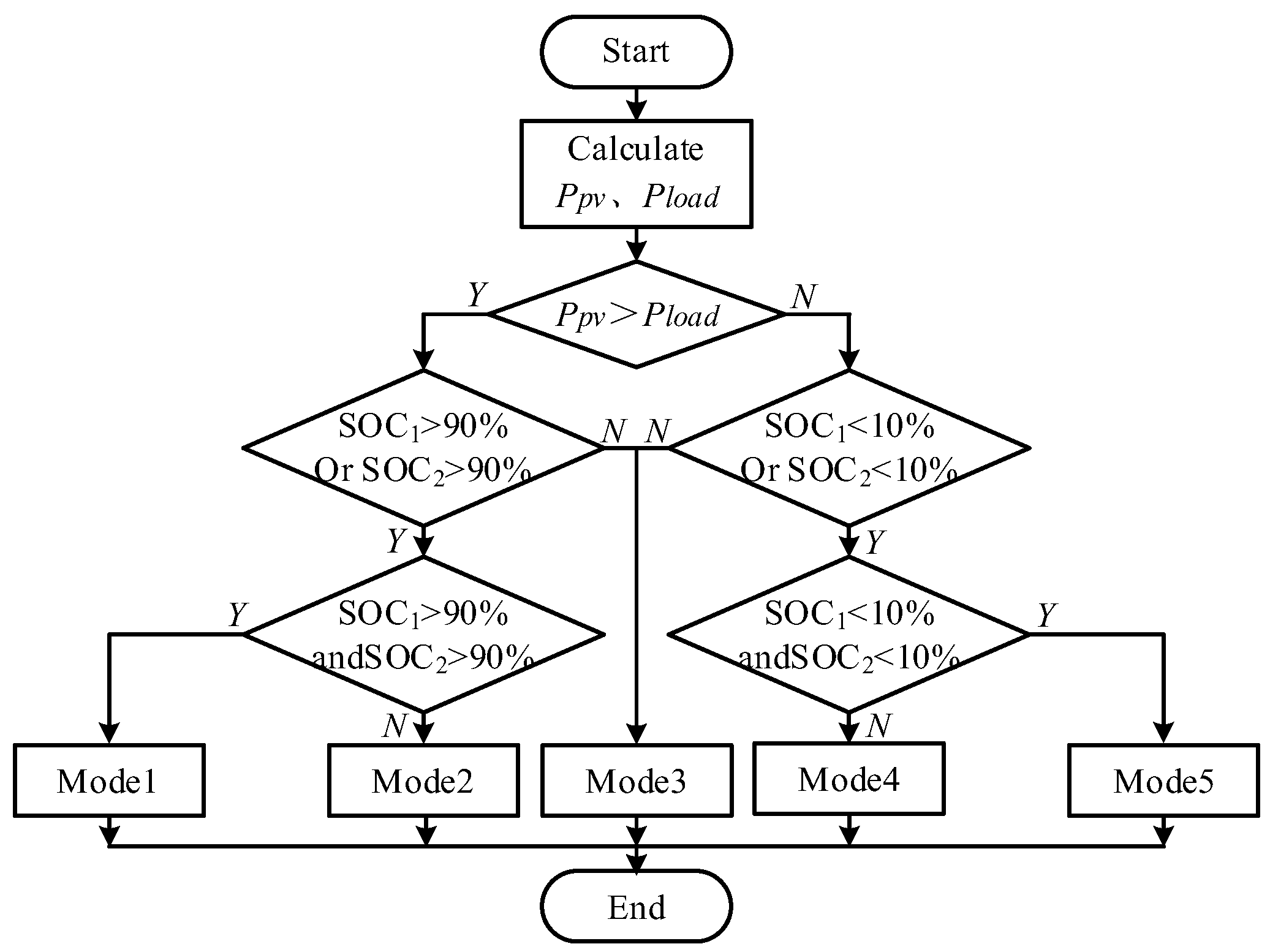
4.2. Power Management and Coordinated Control Strategy
4.3. Simulation Waveforms of the Coordinated Control
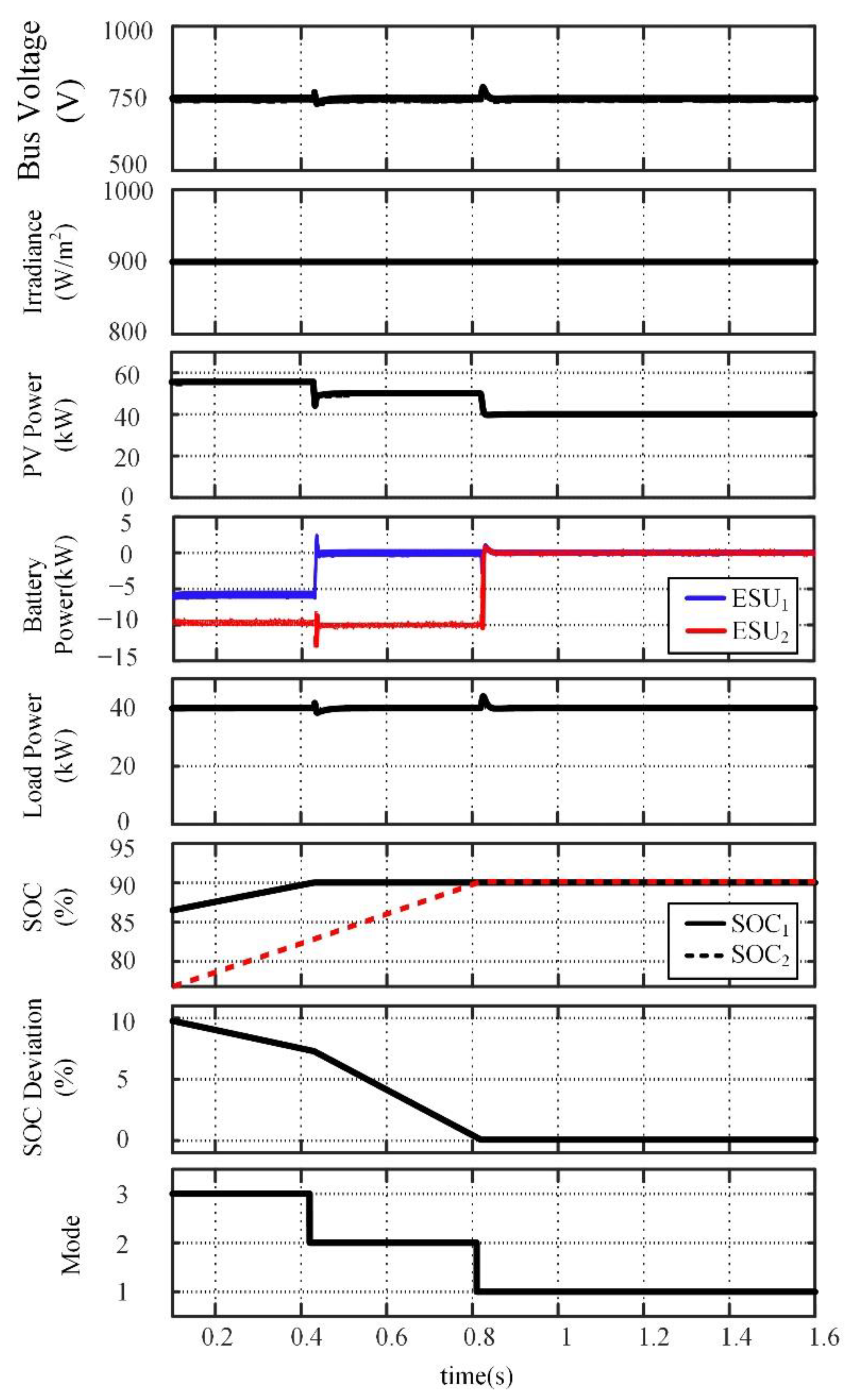
- (1)
- Response to a sudden change of PV power
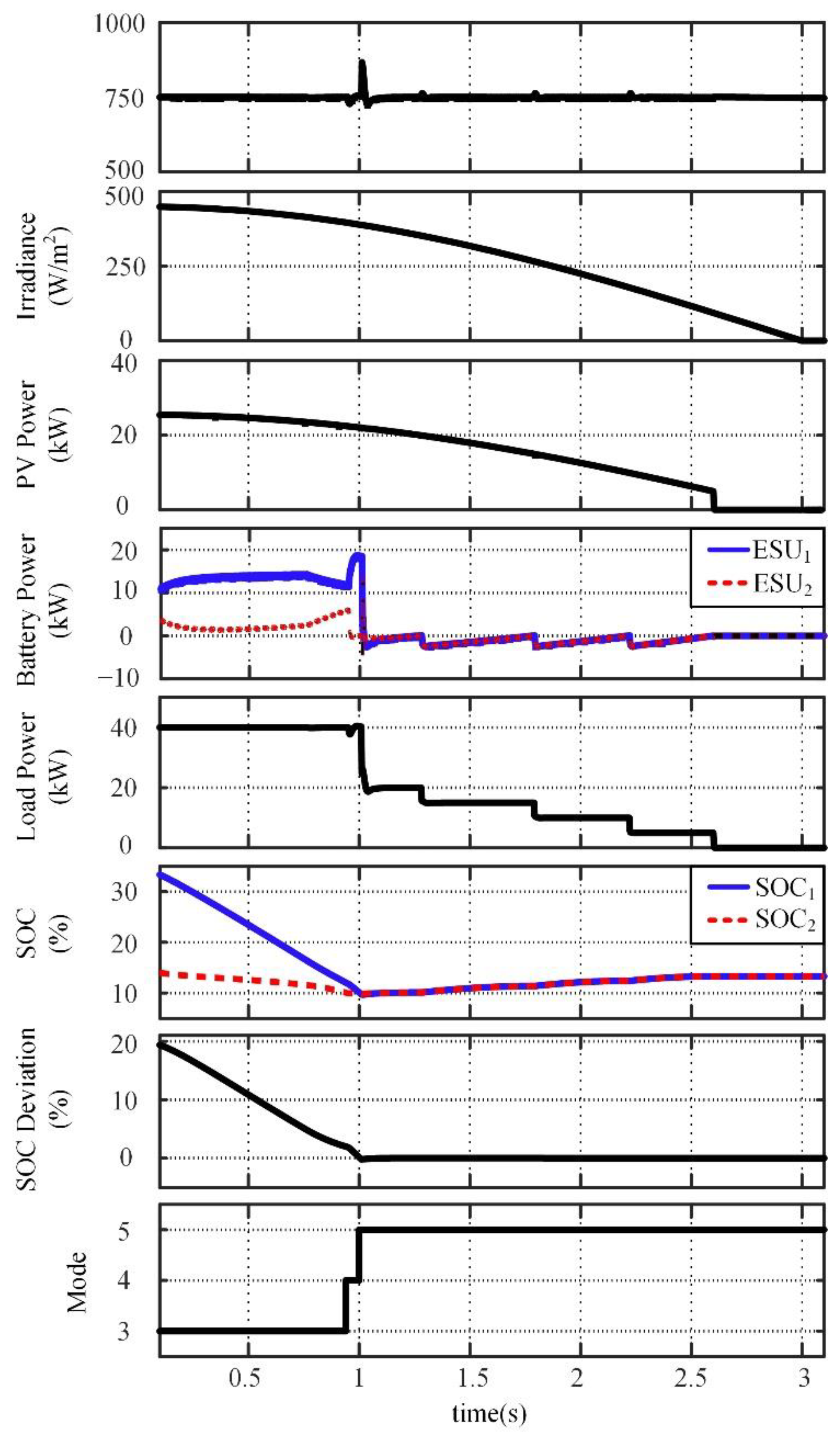
- (2)
- Simulation results under removal of the load
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Li, L.; Dragičević, T.; Guerrero, J.M.; Vasquez, J.C. Supervisory control of an adaptive-droop regulated dc microgrid with battery management capability. IEEE Trans. Power Electron. 2014, 29, 695–706. [Google Scholar]
- Gao, F.; Kang, R.; Cao, J.; Yang, T. Primary and secondary control in dc microgrids: A review. Mod. Power Syst. Clean Energy 2019, 7, 227–242. [Google Scholar] [CrossRef] [Green Version]
- Han, Y.; Ning, X.; Yang, P.; Xu, L. Review of power sharing, voltage restoration and stabilization techniques in hierarchical controlled dc microgrids. IEEE Access 2019, 7, 149202–149223. [Google Scholar] [CrossRef]
- Yan, H.W.; Narang, A.; Tafti, H.D.; Farivar, G.G.; Ceballos, S.; Pou, J. Minimizing energy storage utilization in a stand-alone dc microgrid using photovoltaic flexible power control. IEEE Trans. Smart Grid 2021, 12, 3755–3764. [Google Scholar] [CrossRef]
- Morstyn, T.; Hredzak, B.; Agelidis, V.G. Control strategies for microgrids with distributed energy storage systems: An overview. IEEE Trans. Smart Grid 2018, 9, 3652–3666. [Google Scholar] [CrossRef] [Green Version]
- Madadi, M.; Bhattacharya, S. Adaptive nonlinear droop control with dynamic state-of-charge balancing capability for batteries in dc microgrids. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition, Phoenix, AZ, USA, 14–17 June 2021; pp. 55–61. [Google Scholar]
- Yang, Y.; Tan, S.; Hui, S.Y.R. Mitigating distribution power loss of dc microgrids with dc electric springs. IEEE Trans. Smart Grid 2018, 9, 5897–5906. [Google Scholar] [CrossRef]
- Meng, T.; Lin, Z.; Wan, Y.; Shamash, Y.A. State-of-charge balancing for battery energy storage systems in dc microgrids by distributed adaptive power distribution. IEEE Control Syst. Lett. 2021, 6, 512–517. [Google Scholar] [CrossRef]
- Maharjan, L.; Inoue, S.; Akagi, H.; Asakura, J. State-of-charge (SOC)-balancing control of a battery energy storage system based on a. cascade PWM converter. IEEE Trans. Power Electron. 2009, 24, 1628–1636. [Google Scholar] [CrossRef]
- Huang, W.; Qahouq, J.A.A. Energy sharing control scheme for state-of-charge balancing of distributed battery energy storage system. IEEE Trans. Ind. Electron. 2015, 62, 2764–2776. [Google Scholar] [CrossRef]
- Hong, Y.; Xu, D.; Yang, W.; Jiang, B.; Yan, X.G. A novel multi-agent model-free control for state-of-charge balancing between distributed battery energy storage systems. IEEE Trans. Emerg. Top. Comput. Intell. 2021, 5, 679–688. [Google Scholar] [CrossRef]
- Bhosale, R.; Gupta, R.; Agarwal, V. A novel control strategy to achieve soc balancing for batteries in a dc microgrid without droop control. IEEE Trans. Ind. Appl. 2021, 57, 4196–4206. [Google Scholar] [CrossRef]
- Fagundes, T.A.; Fuzato, G.H.F.; Ferreira, P.G.B.; Biczkowski, M.; Machado, R.Q. Fuzzy controller for energy management and soc equalization in dc microgrids powered by fuel cell and energy storage units. IEEE J. Emerg. Sel. Top. Ind. Electron. 2022, 3, 90–100. [Google Scholar] [CrossRef]
- Liu, C.; Zhao, J.; Wang, S.; Lu, W.; Qu, K. Active identification method for line resistance in dc microgrid based on single pulse injection. IEEE Trans. Power Electron. 2018, 33, 5561–5564. [Google Scholar] [CrossRef]
- Zhi, N.; Ding, K.; Du, L.; Zhang, H. An SOC-based virtual dc machine control for distributed storage systems in dc microgrids. IEEE Trans. on Energy Convers. 2020, 35, 1411–1419. [Google Scholar] [CrossRef]
- Baharizadeh, M.; Golsorkhi, M.S.; Shahparasti, M.; Savaghebi, M. A two-layer control scheme based on P-V droop characteristic for accurate power sharing and voltage regulation in dc microgrids. IEEE Trans. Smart Grid 2021, 12, 2776–2787. [Google Scholar] [CrossRef]
- Braitor, A.C.; Konstantopoulos, G.C.; Kadirkamanathan, V. Current-limiting droop control design and stability analysis for paralleled boost converters in dc microgrids. IEEE Trans. Control Syst. Technol. 2021, 29, 385–394. [Google Scholar] [CrossRef]
- Zhang, Y.Y.; Qu, X.H.; Tang, M.D.; Yao, R.Y.; Wu, C. Design of nonlinear droop control in dc microgrid for desired voltage regulation and current sharing accuracy. IEEE J. Emerg. Sel. Top. Circuits Syst. 2021, 11, 168–175. [Google Scholar] [CrossRef]
- Lu, X.; Sun, K.; Guerrero, J.M.; Vasquez, J.C.; Huang, L. State-of-charge balance using adaptive droop control for distributed energy storage systems in dc microgrid applications. IEEE Trans. Ind. Electron. 2014, 61, 2804–2814. [Google Scholar] [CrossRef] [Green Version]
- Lu, X.; Sun, K.; Guerrero, J.M.; Vasquez, J.C.; Huang, L. Double-quadrant state-of-charge-based droop control method for distributed energy storage systems in autonomous dc microgrids. IEEE Trans. Smart Grid 2015, 6, 147–157. [Google Scholar] [CrossRef] [Green Version]
- Diaz, N.L.; Dragičević, T.; Vasquez, J.C.; Guerrero, J.M. Intelligent distributed generation and storage units for dc microgrids—a new concept on cooperative control without communications beyond droop control. IEEE Trans. Smart Grid 2014, 5, 2476–2484. [Google Scholar] [CrossRef] [Green Version]
- Oliveira, T.R.; Silva, W.W.A.G.; Donoso-Garcia, P.F. Distributed secondary level control for energy storage management in dc microgrids. IEEE Trans. Smart Grid 2017, 8, 2597–2607. [Google Scholar] [CrossRef]
- Hoang, K.D.; Lee, H. Accurate power sharing with balanced battery state of charge in distributed DC microgrid. IEEE Trans. Ind. Electron. 2019, 66, 1883–1893. [Google Scholar] [CrossRef]
- Morstyn, T.; Savkin, A.V.; Hredzak, B.; Agelidis, V.G. Multi-agent sliding mode control for state of charge balancing between battery energy storage systems distributed in a DC microgrid. IEEE Trans. Smart Grid 2018, 9, 4735–4743. [Google Scholar] [CrossRef] [Green Version]
- Xu, D.; Zhang, W.; Jiang, B.; Shi, P.; Wang, S. Directed-graph-observer-based model-free cooperative sliding mode control for distributed energy storage systems in dc microgrid. IEEE Trans. Ind. Inform. 2020, 16, 1224–1234. [Google Scholar] [CrossRef]
- Chen, X.; Shi, M.; Sun, H.; Li, Y.; He, H. Distributed cooperative control and stability analysis of multiple dc electric springs in a dc microgrid. IEEE Trans. Ind. Electron. 2018, 65, 5611–5622. [Google Scholar] [CrossRef]
- Lin, X.; Zamora, R.; Baguley, C.A. “A fully filter-based decentralized control with state of charge balancing strategy for battery energy storage systems in autonomous dc microgrid applications. IEEE Access 2021, 9, 15028–15040. [Google Scholar] [CrossRef]
- Zheng, Y.; Tian, G.; Zhang, J. SOC balancing control strategy based on piecewise adaptive droop coefficient algorithm for multienergy storage units in dc microgrid. In Proceedings of the IEEE 4th International Conference on Electronics Technology, Chengdu, China, 7–10 May 2021; pp. 432–436. [Google Scholar]
- Long, B.; Liao, Y.; Chong, K.T.; Rodríguez, J.; Guerrero, J.M. Enhancement of frequency regulation in ac microgrid: A fuzzy-MPC controlled virtual synchronous generator. IEEE Trans. Smart Grid 2021, 12, 3138–3149. [Google Scholar] [CrossRef]
- Coelho, V.N. A self-adaptive evolutionary fuzzy model for load forecasting problems on smart grid environment. Appl. Energy 2016, 169, 567–584. [Google Scholar] [CrossRef]
- Wang, Y.; Jin, Q.; Zhang, R. Improved fuzzy PID controller design using predictive functional control structure. ISA Trans. 2017, 71, 354–363. [Google Scholar] [CrossRef]
- Ghanbari, N.; Mobarrez, M.; Bhattacharya, S. A review and modeling of different droop control based methods for battery state of the charge balancing in dc microgrids. In Proceedings of the 44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 1625–1632. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | Physical Domain | Quantization Factor | Fuzzy Domain |
|---|---|---|---|
| ΔSOC | [−50,50] | 0.02 | [−1,1] |
| dP | Charge: [−10,10] | 0.1 | [−1,1] |
| Discharge: [−25,25] | 0.04 | [−1,1] | |
| Δk | [−0.2,0.2] | 5 | [−1,1] |
| ΔSOC | dP | Δk | |
|---|---|---|---|
| Charging | Discharging | ||
| P | P | N | Z |
| P | Z | P | N |
| P | N | P | N |
| Z | P | N | P |
| Z | Z | Z | Z |
| Z | N | P | N |
| N | P | N | P |
| N | Z | N | P |
| N | N | Z | N |
| Description | Value |
|---|---|
| Bus voltage Uout | 750 V |
| Capacitance Cout | 2000 μF |
| Inductance L | 2 mH |
| PV system | 55 kW |
| Important loads | 20 kW |
| Line impedance of ESU1 Rline1 | 0.03 Ω |
| Line impedance of ESU2 Rline2 | 0.05 Ω |
| Real capacity of ESU1 Ce1 | 133 Ah |
| Real capacity of ESU2 Ce2 | 130 Ah |
| Non-important loads | 4 × 5 kW |
| SOC | Ppv > Pload | Ppv < Pload |
|---|---|---|
| SOC1 > 90% and SOC2 > 90% | Mode1 | Mode3 |
| SOC1 > 90% or SOC2 > 90% | Mode2 | Mode3 |
| 10% ≤ SOC1 ≤ 90% 10% ≤ SOC2 ≤ 90% | Mode3 | Mode3 |
| SOC1 < 10% or SOC2 < 10% | Mode3 | Mode4 |
| SOC1 < 10% and SOC2 < 10% | Mode3 | Mode5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, G.; Zheng, Y.; Liu, G.; Zhang, J. SOC Balancing and Coordinated Control Based on Adaptive Droop Coefficient Algorithm for Energy Storage Units in DC Microgrid. Energies 2022, 15, 2943. https://doi.org/10.3390/en15082943
Tian G, Zheng Y, Liu G, Zhang J. SOC Balancing and Coordinated Control Based on Adaptive Droop Coefficient Algorithm for Energy Storage Units in DC Microgrid. Energies. 2022; 15(8):2943. https://doi.org/10.3390/en15082943
Chicago/Turabian StyleTian, Guizhen, Yuding Zheng, Guangchen Liu, and Jianwei Zhang. 2022. "SOC Balancing and Coordinated Control Based on Adaptive Droop Coefficient Algorithm for Energy Storage Units in DC Microgrid" Energies 15, no. 8: 2943. https://doi.org/10.3390/en15082943
APA StyleTian, G., Zheng, Y., Liu, G., & Zhang, J. (2022). SOC Balancing and Coordinated Control Based on Adaptive Droop Coefficient Algorithm for Energy Storage Units in DC Microgrid. Energies, 15(8), 2943. https://doi.org/10.3390/en15082943