
A Novel Generic Diagnosis Algorithm in the Time Domain Representation


Abstract
:1. Introduction
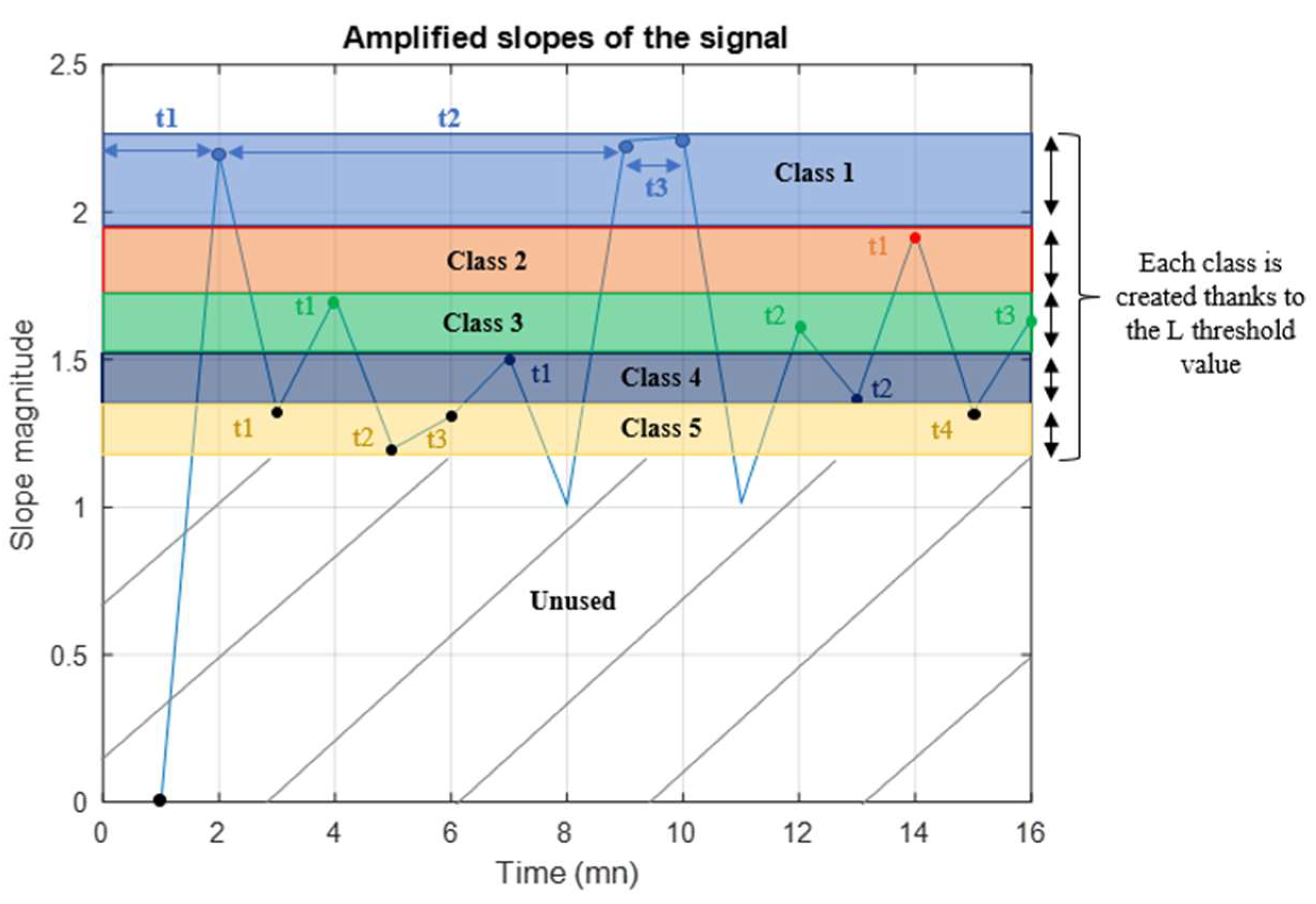
2. Generic Fault Diagnosis Algorithm
| Algorithm 1: class seperation of the signal E |
| BEGIN |
| real E, Emax, k, C, n, a, j, index, Tsample, L |
| n ← 1 |
| Tsample ← 1 |
| L ← 0.099 |
| a ← 0 |
| j ← 0 |
| while length(E) > 0 do |
| Emax ← max(E) |
| for k from 1 to length(E) do |
| if Ek ≥ Emax − (Emax × L) |
| Ca,j ← (k − n) × Tsample //The time Ta of the jth class |
| n ← k |
| index_k ← k |
| a ← +1 |
| end |
| end |
| E ← suppress (Eindex) |
| j ← j + 1 |
| end |
| END |
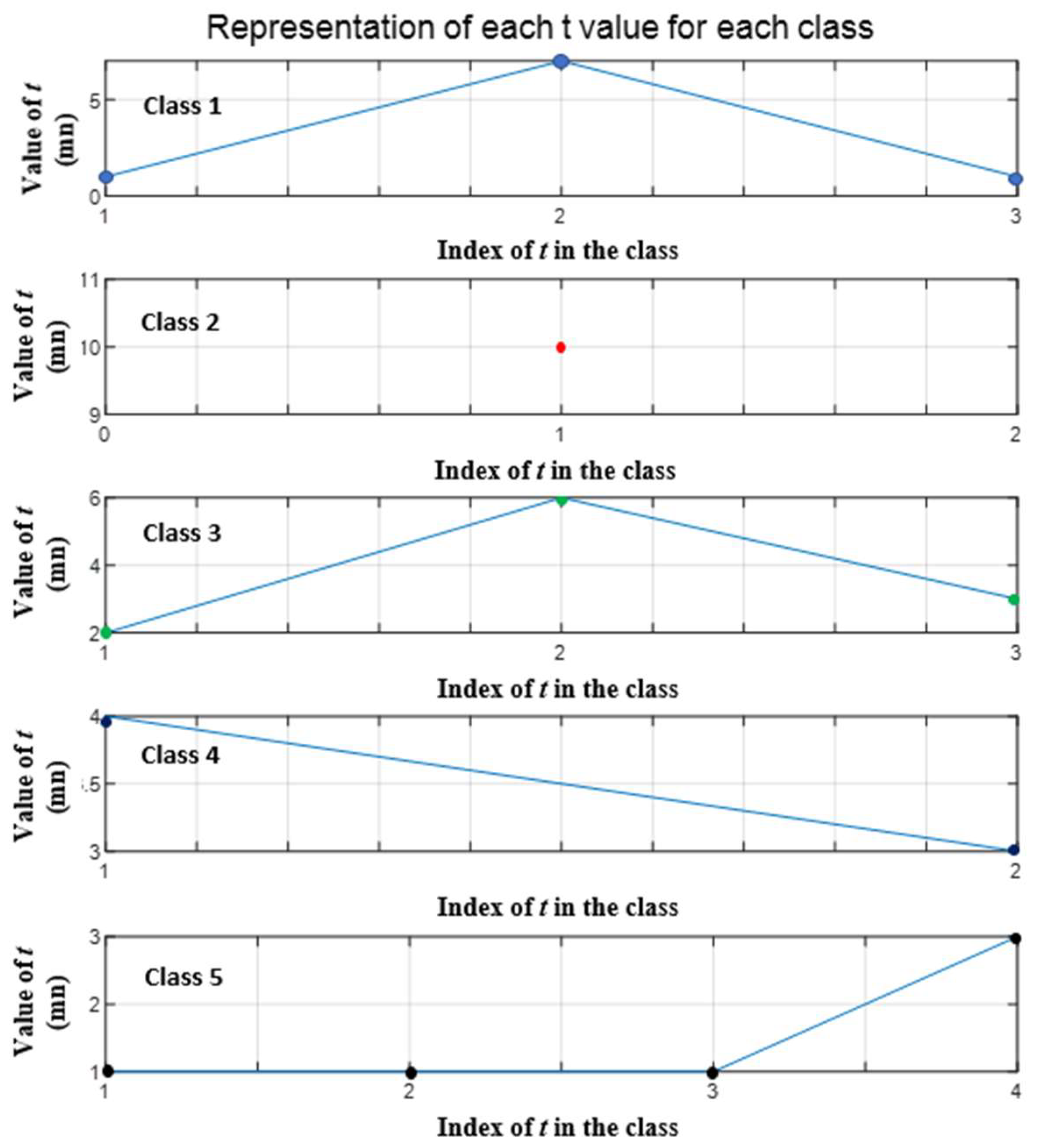
| Algorithm 2: representation of the GDA output on a F window |
| BEGIN |
| for n from 0 to 2 // Initialisation of V |
| x = [10, 15, 20]; // 10, 15, and 20 are the three different sizes of V |
| vector Vn ← zeros(x(n)) // User choice |
| array M |
| for i from 0 to length(Vn) do |
| if i ≤ length(M) do |
| Vn (length(Vn)-i) = M(length(M)-i) |
| end |
| end |
| vector F ← 10 // The number of desired classes |
| real nStep = length(Vn) ÷ length(F) |
| for i from 0 to length(F) |
| F(i) = Sum (Vn(i*nStep: i*nStep+nStep)) ÷ nStep |
| end |
| end |
| END |
3. Experimental Validation of the GDA Algorithm
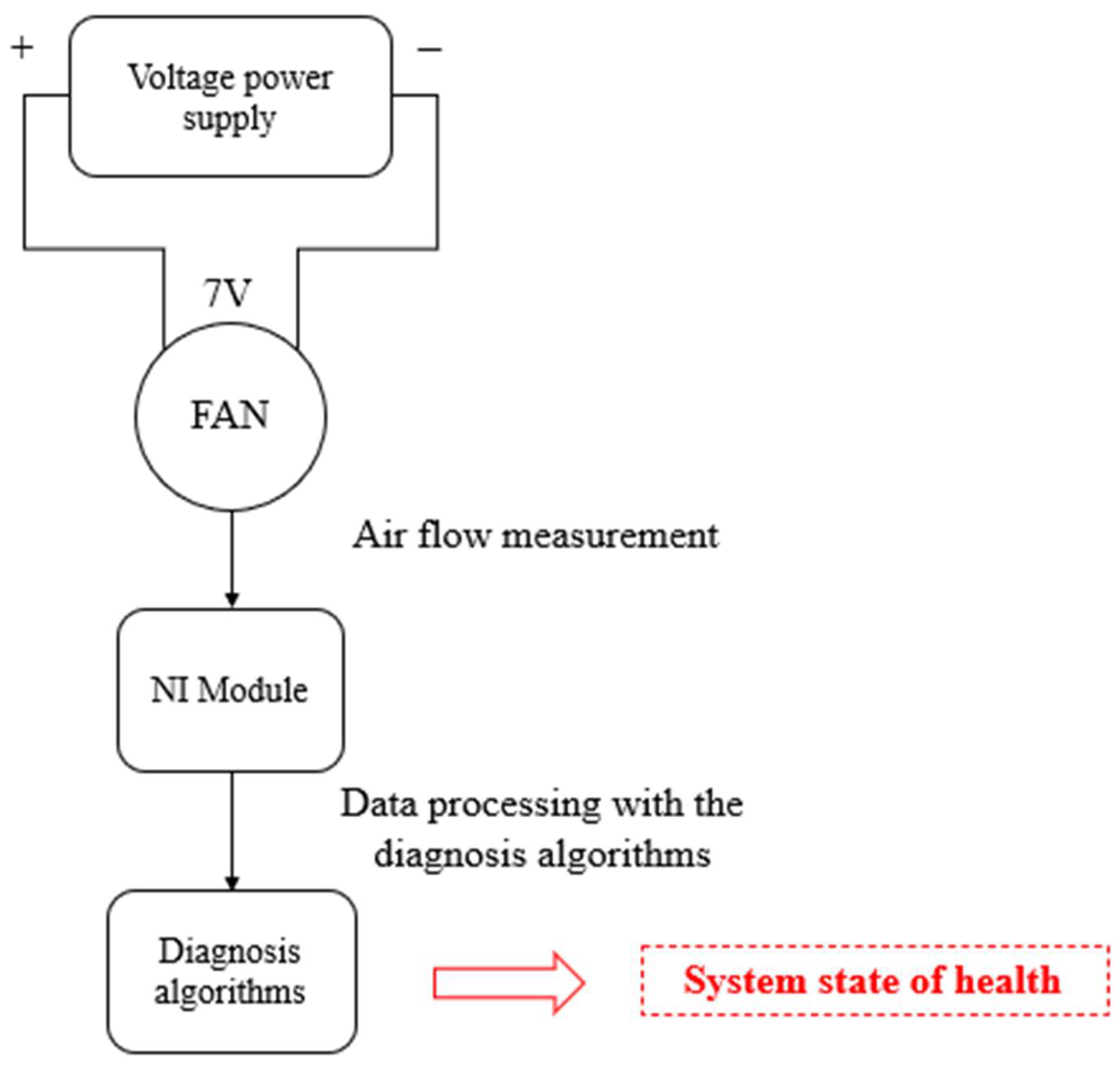
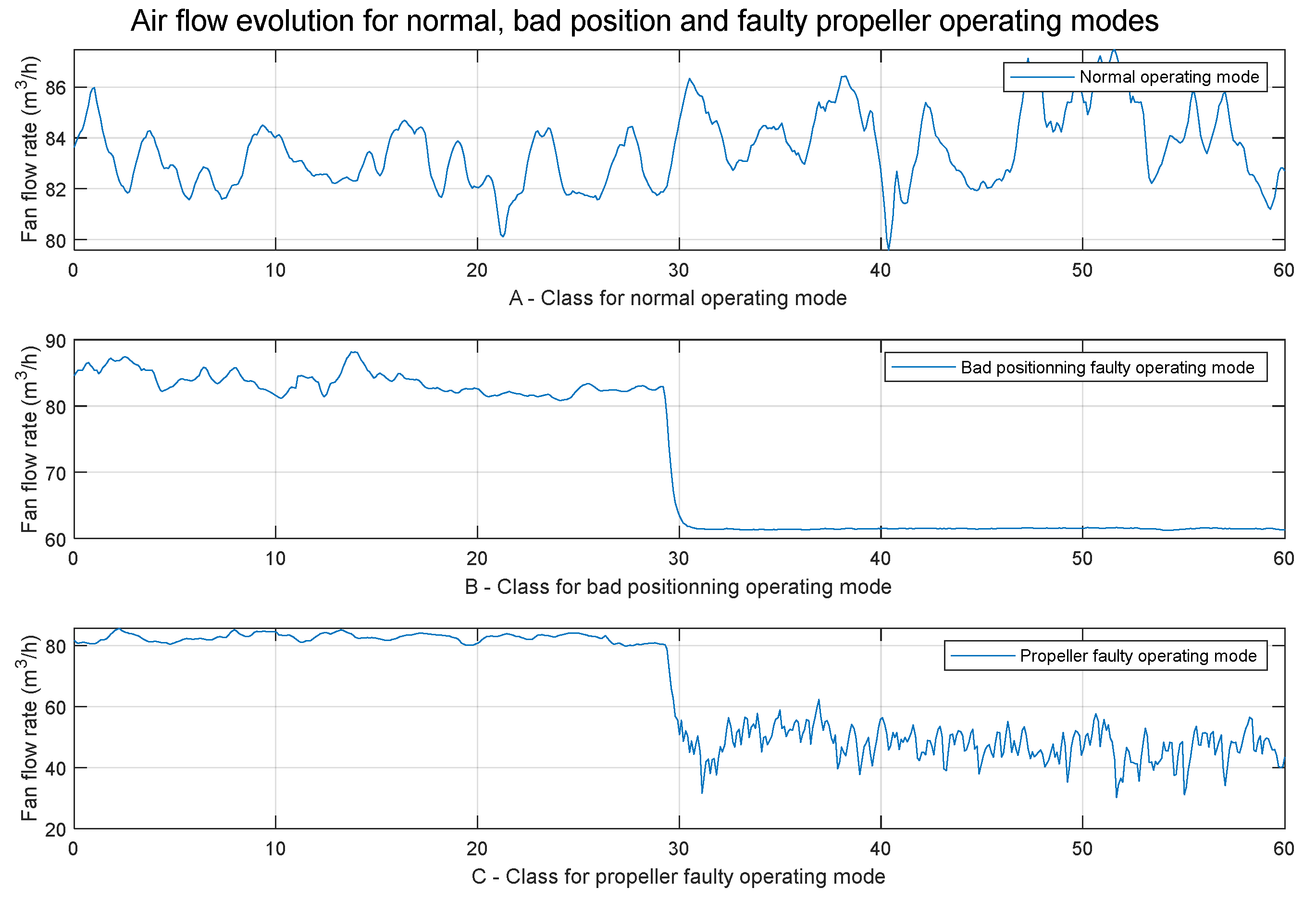
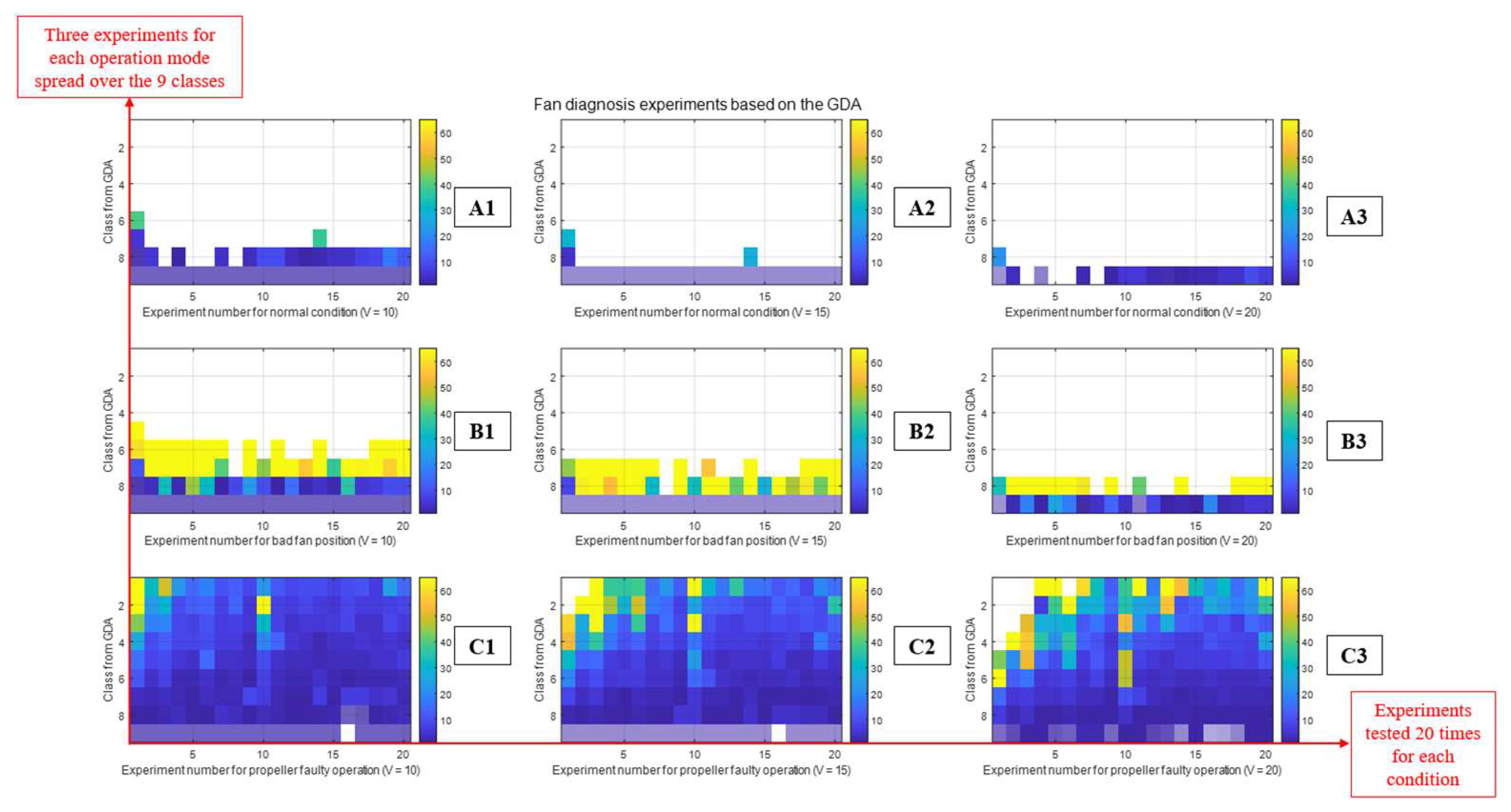
First Application: Application of the GDA to a Fan
- Set the fan vertically on a flat, unobstructed surface,
- Proceed to a 2 Hz air flow measurement,
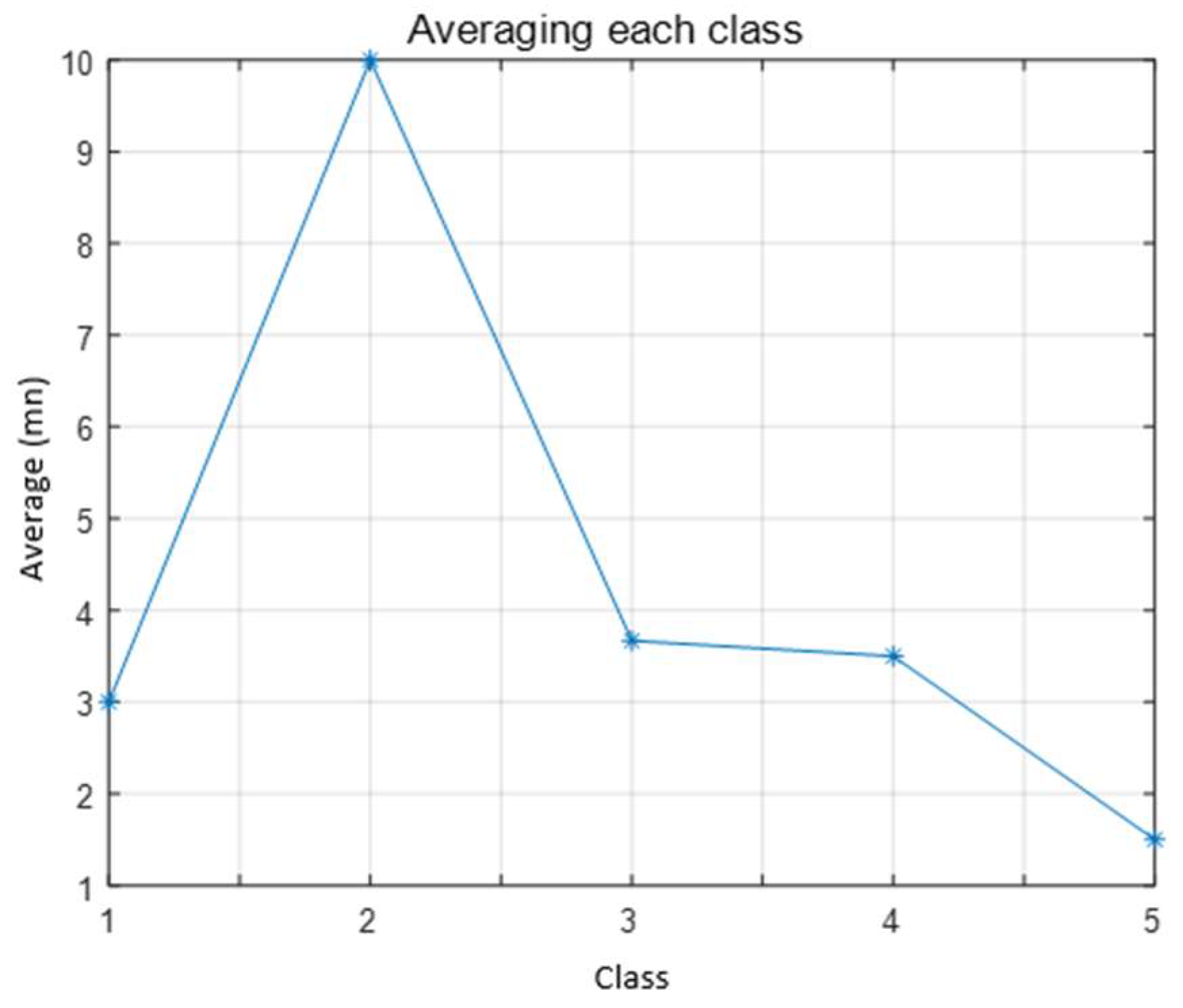
- Compute the normalized representation of the average of each class,
- Compare the result to another normal condition and conclude about the operating mode.
- Set the fan horizontally on a flat surface,
- Proceed to a 2 Hz air flow measurement,
- Compute the normalized representation of the average of each class,
- Compare the result to a normal condition and conclude about the operating mode.
- Set the fan vertically on a flat surface and perform a random pressure on the propeller,
- Proceed to a 2 Hz air flow measurement,
- Compute the normalized representation of the average of each class,
- Compare the result to a normal condition and conclude about the operating mode.
- -
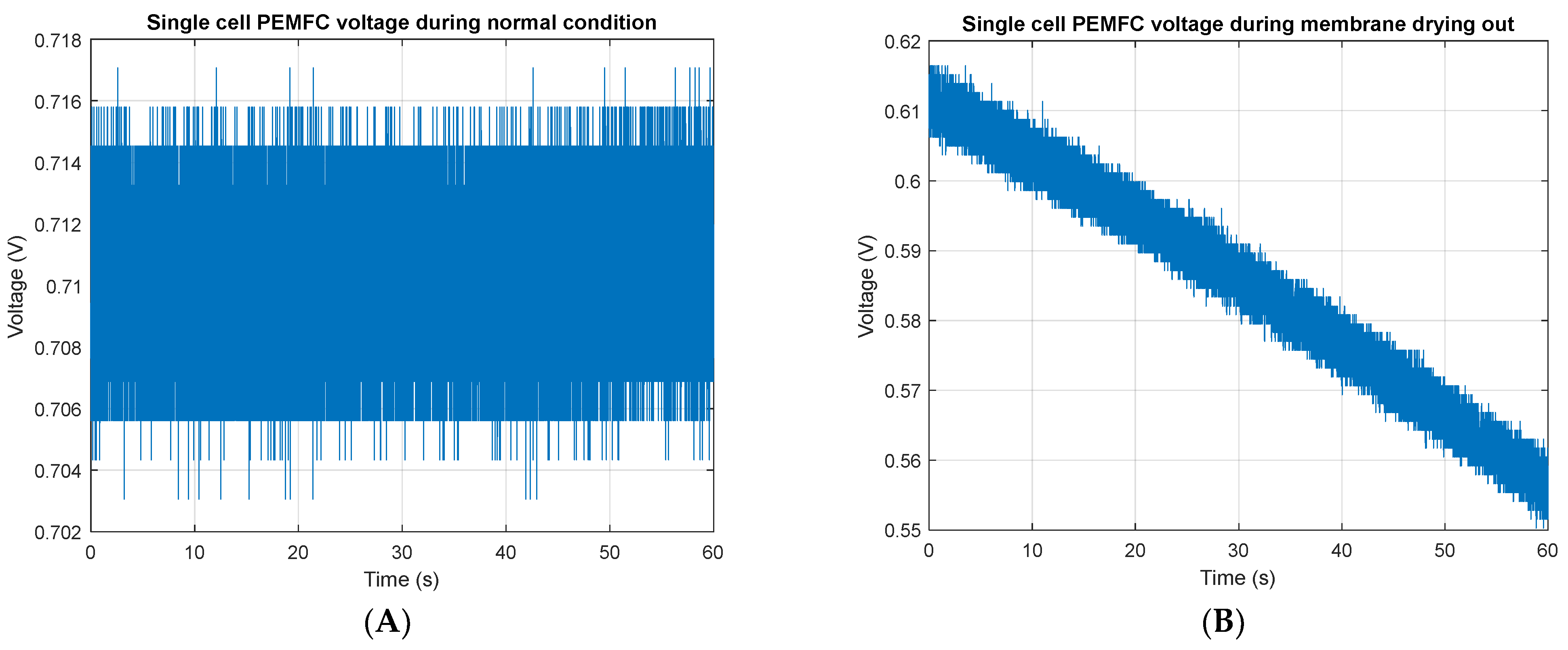
- Limit value = 0.62.
- -
- Tsample = 0.5 s.
- -
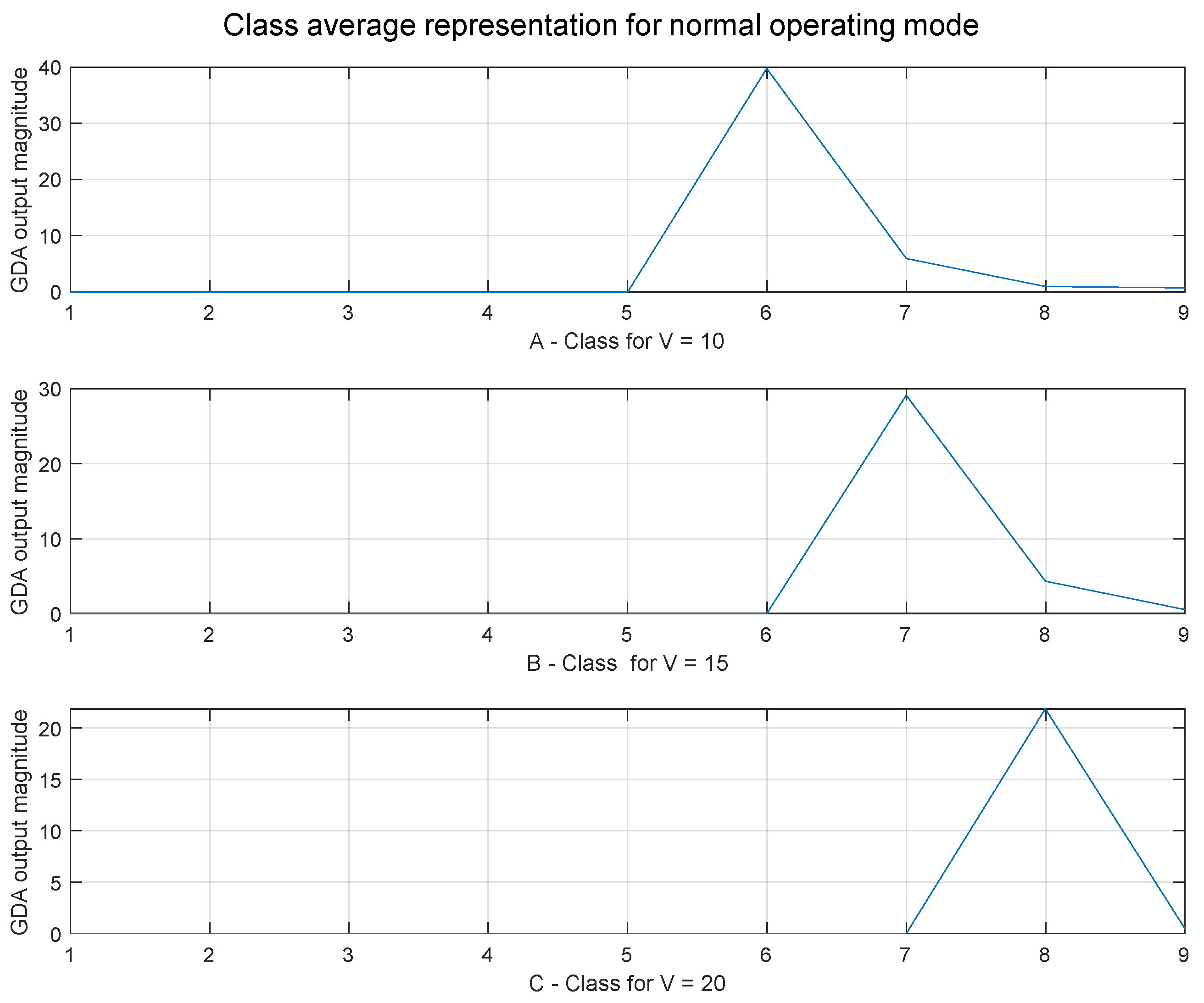
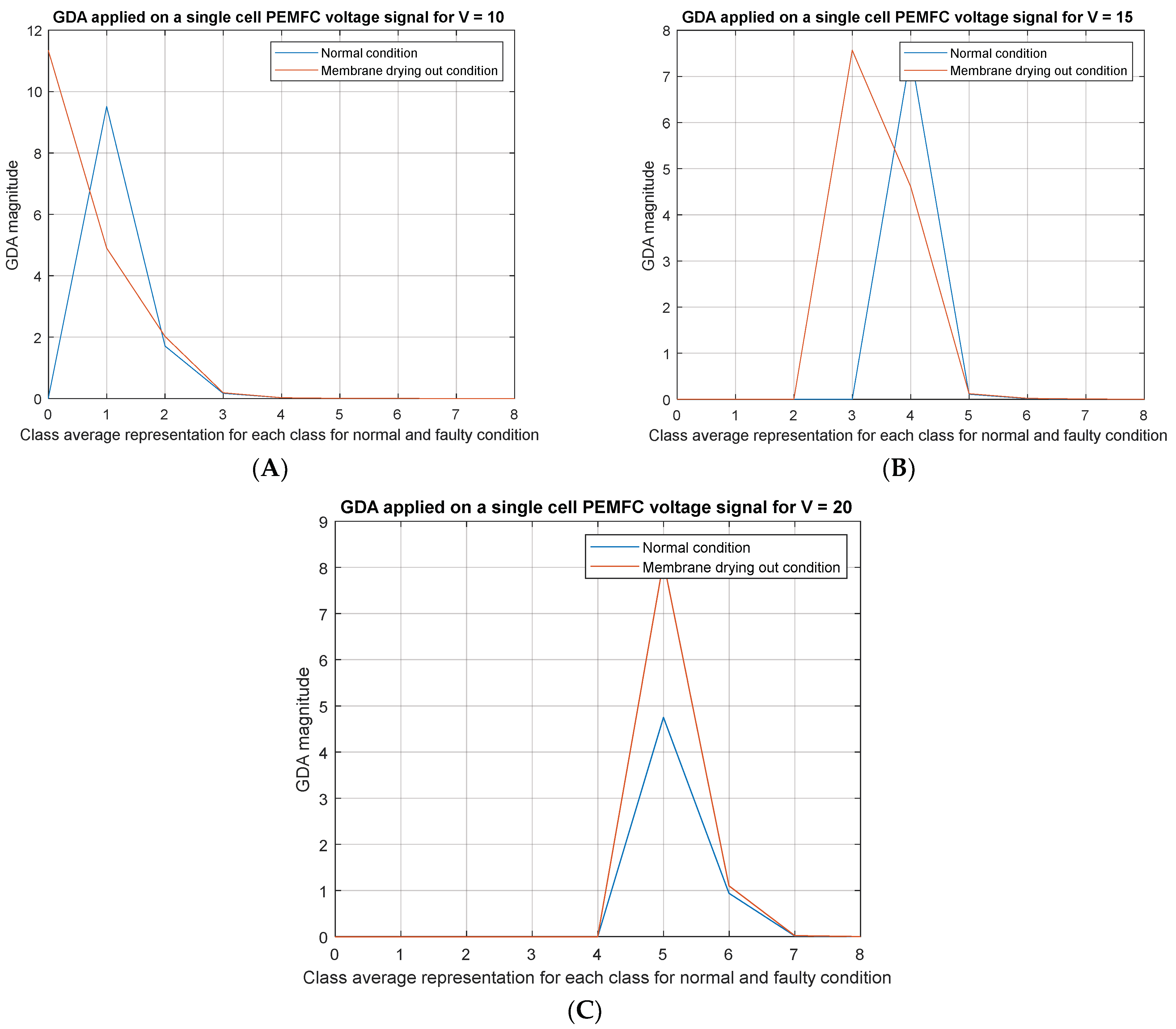
- Three values V for the normalization: V1 = 10; V2 = 15; V3 = 20.
- -
- Representation in 9 classes.
- -
- A low number of classes with low values is equivalent to a normal operating mode,
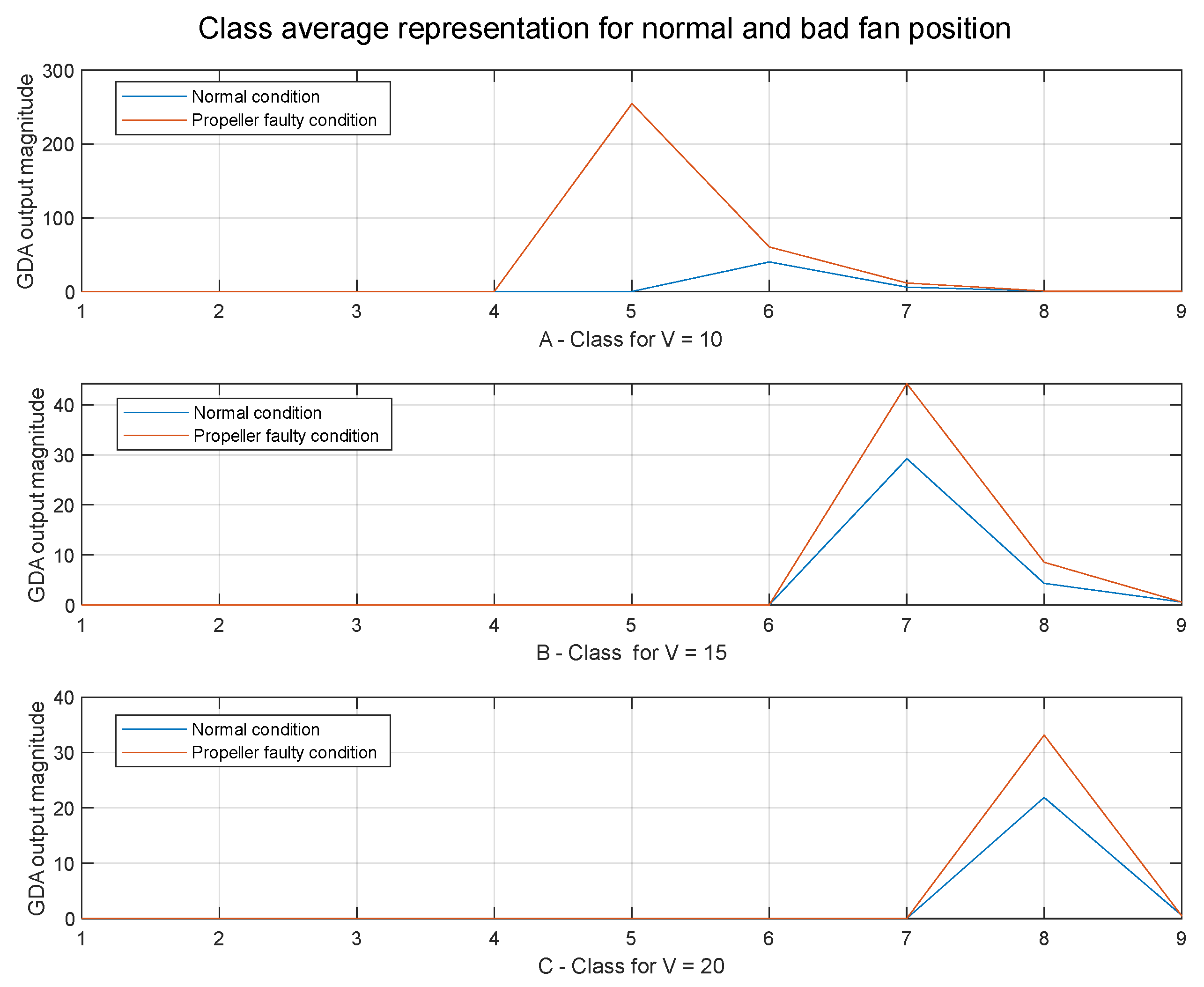
- -
- A low number of classes with high values is equivalent to the occurrence of bad fan positioning,
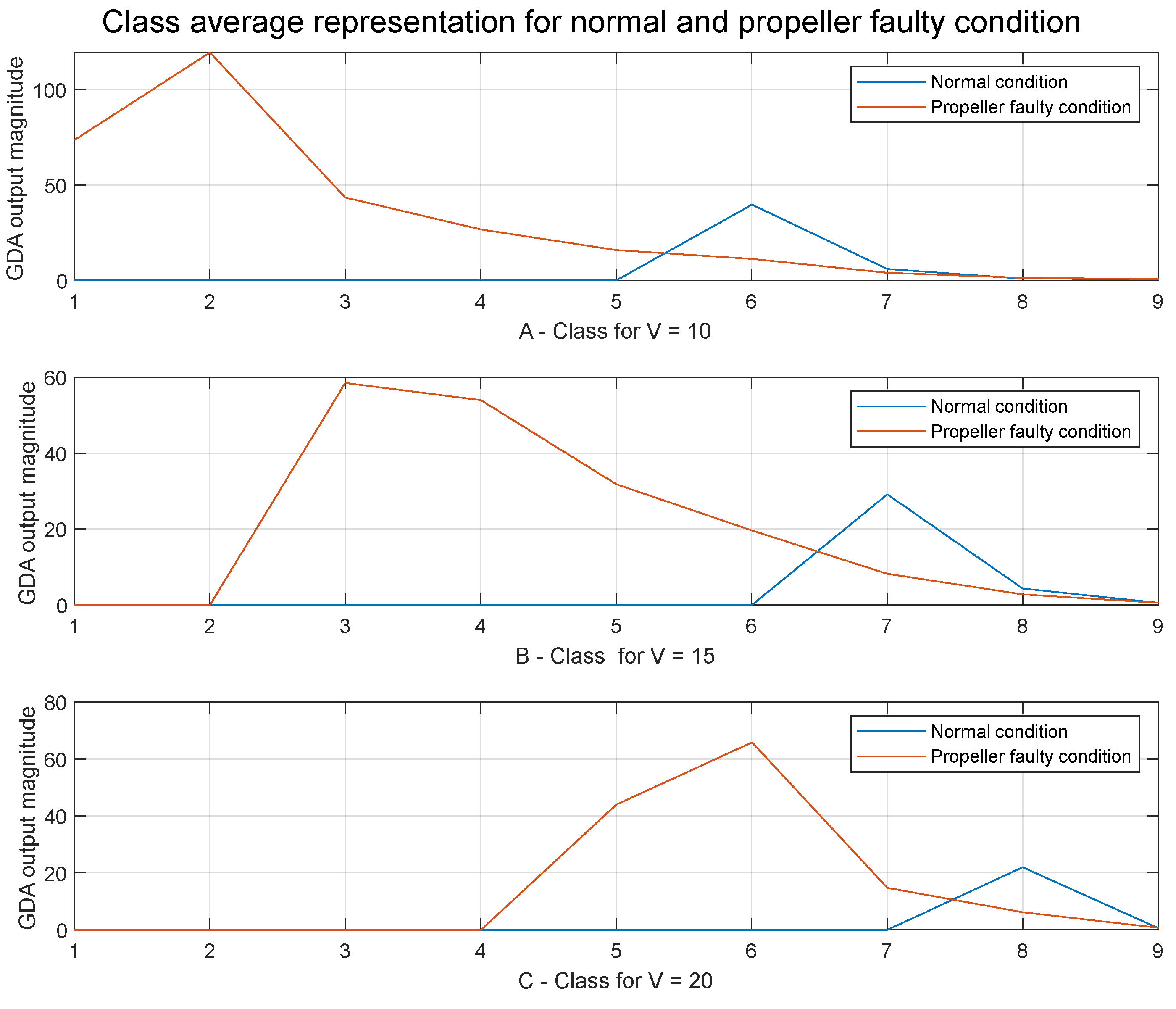
- -
- A high number of classes with a mix of low and high values is equivalent to the occurrence of a propeller faulty operation.
| Algorithm 3: rules for diagnosis |
| BEGIN //Example for V = 10 |
| Integer nClass_normal = 2 // Number of maximum classes for a normal condition |
| Integer Value_Normal_Classe2 = 15 // Highest value of the second class for normal condition |
| vector flag1, flag2 = 0; // Flags for fault detection |
| char status = “normal”; |
| for i from 0 to 8 |
| vector M = [1:9] // Value of each class M |
| if Mi > 0 do |
| flag1_i = 1; // To compute the number of non-empty classes |
| end |
| if Mi > Value_Normal_Classe2 do |
| flag2_i = 1; //To check if a class value is higher than the normal class |
| end |
| end |
| if SUM(flag1) > nClass_normal AND SUM(flag2) ! = 0 do |
| status = “fault”; |
| end |
| END |
- -
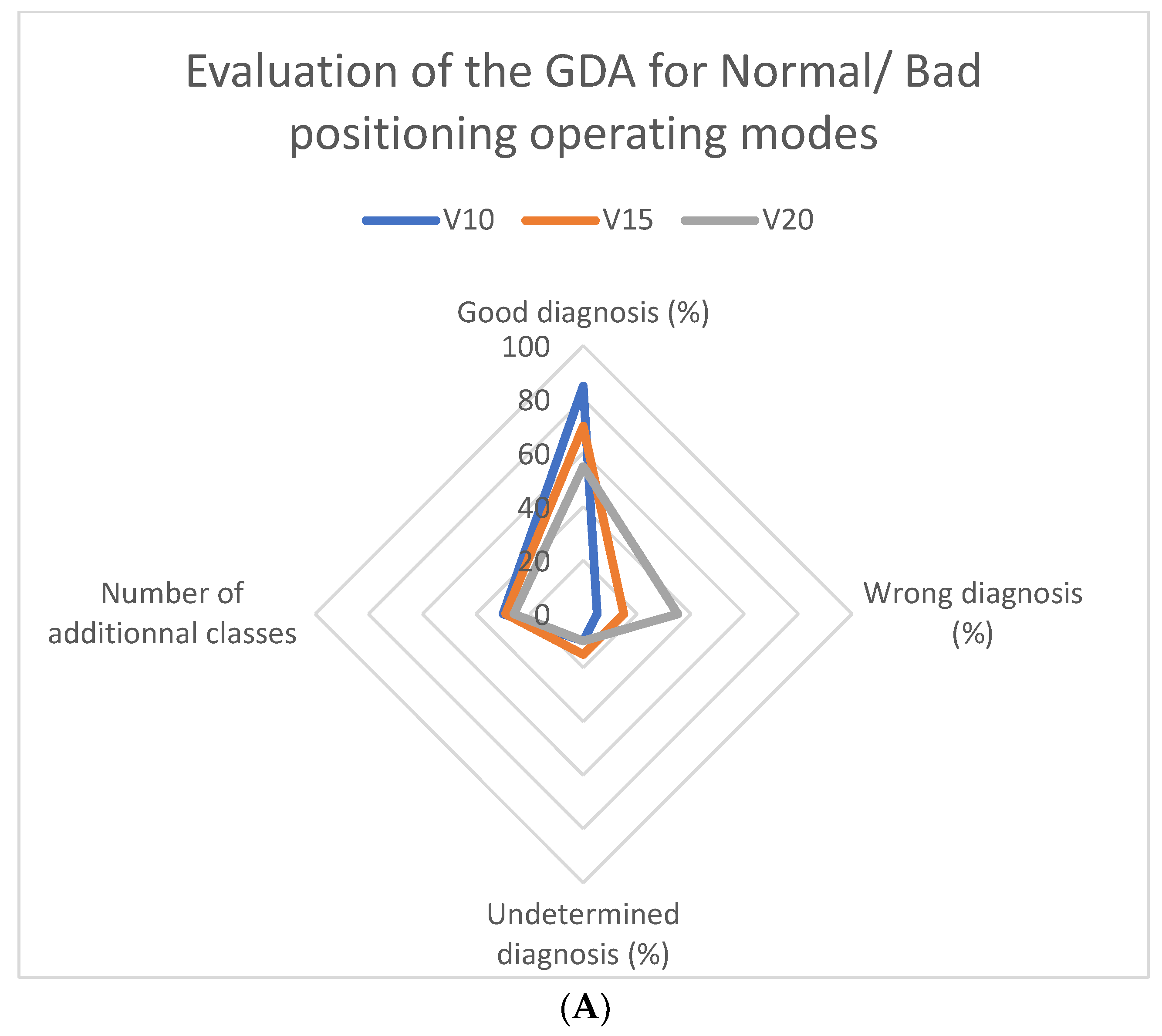
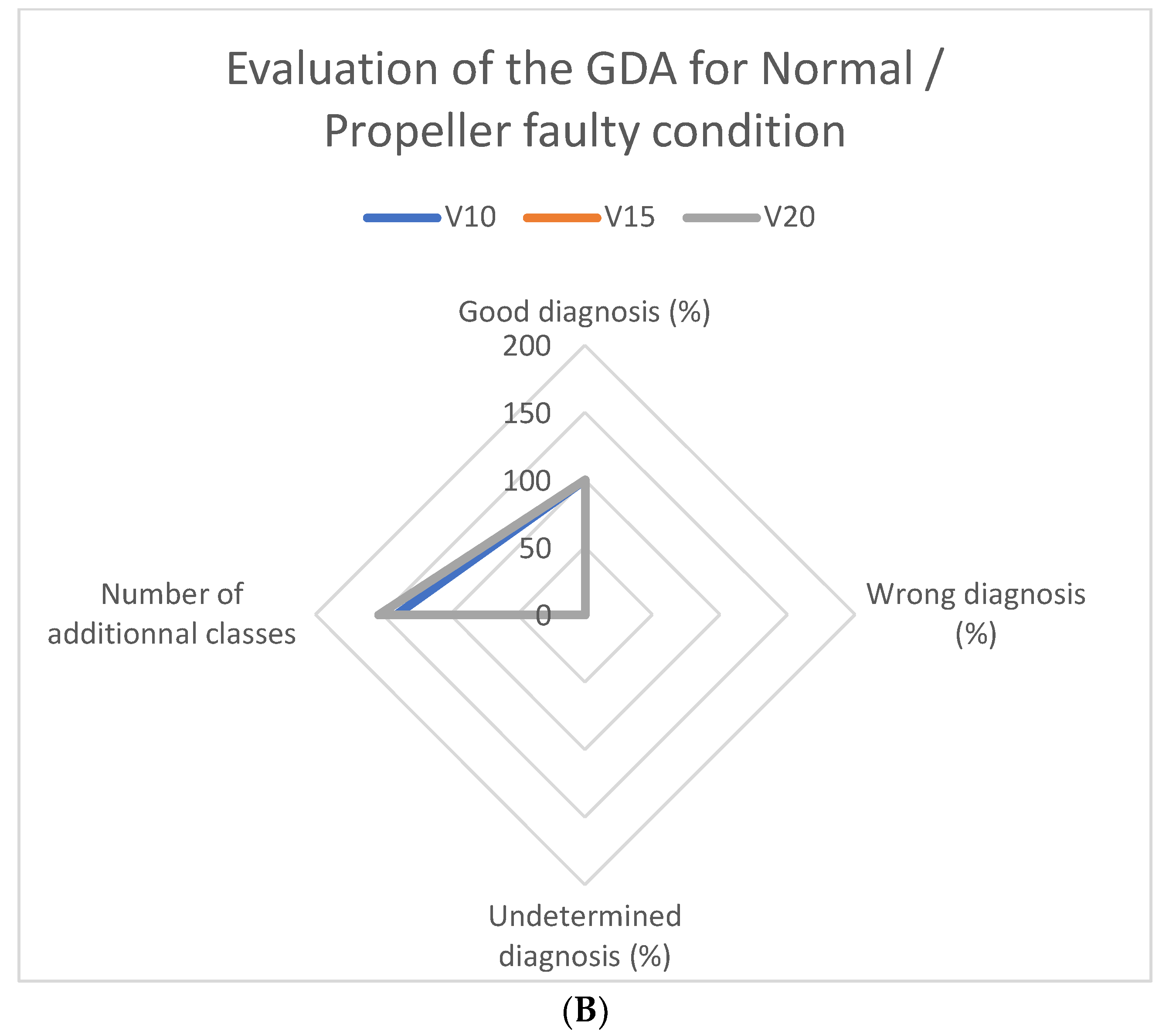
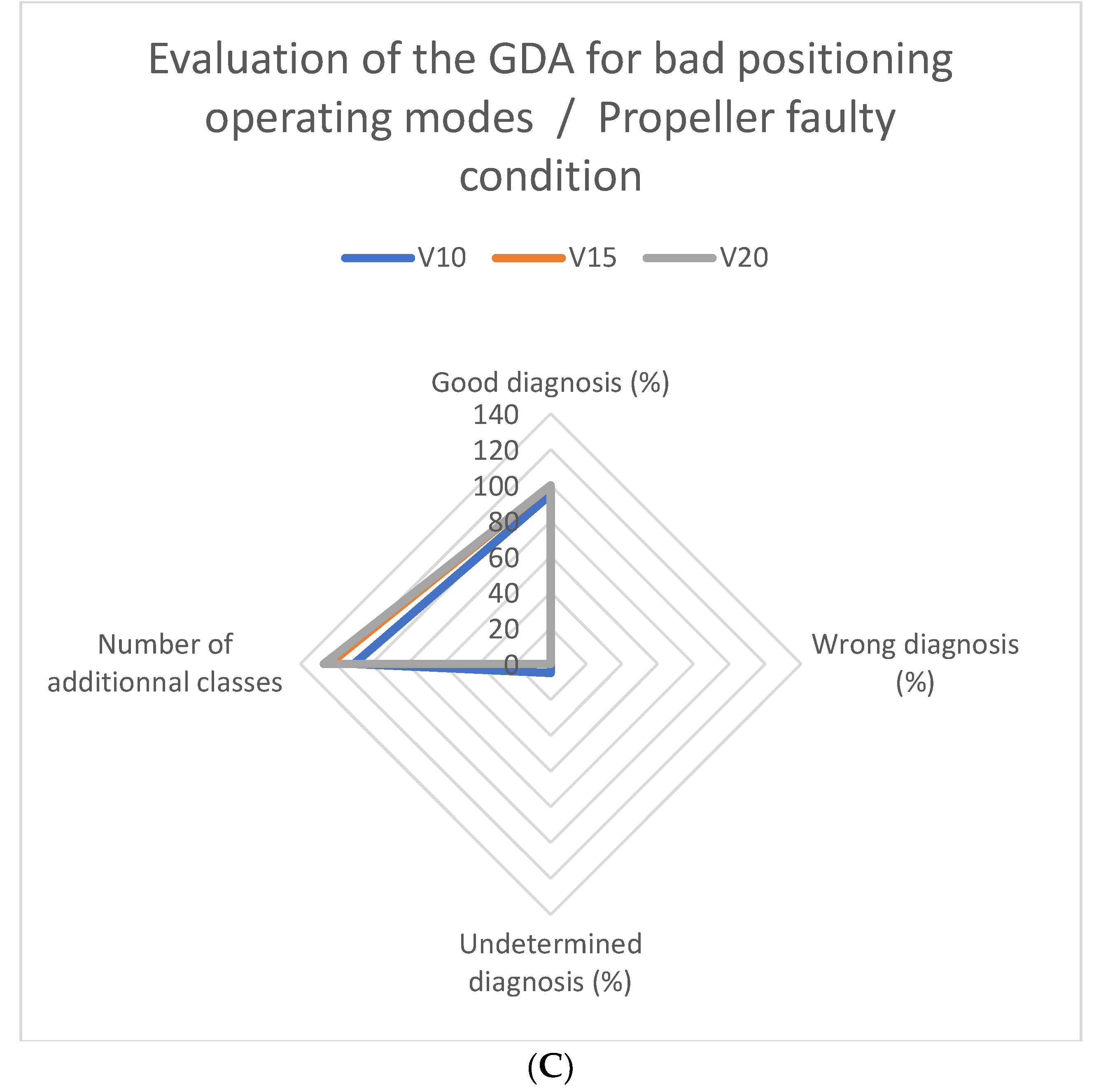
- Number of good diagnoses,
- -
- Number of wrong diagnoses,
- -
- Undetermined operating mode,
- -
- Number of additional classes.
4. Conclusions and Discussion
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dijoux, E.; Steiner, N.Y.; Benne, M.; Péra, M.-C.; Pérez, B.G. A review of fault tolerant control strategies applied to proton exchange membrane fuel cell systems. J. Power Sources 2017, 359, 119–133. [Google Scholar] [CrossRef] [Green Version]
- Yang, C.; Gui, W.; Chen, Z.; Zhang, J.; Peng, T.; Yang, C.; Karimi, H.R.; Ding, S.X. Voltage Difference Residual-Based Open-Circuit Fault Diagnosis Approach for Three-Level Converters in Electric Traction Systems. IEEE Trans. Power Electron. 2020, 35, 3012–3028. [Google Scholar] [CrossRef]
- Steiner, N.Y.; Hissel, D.; Moçotéguy, P.; Candusso, D.; Marra, D.; Pianese, C.; Sorrentino, M. Application of Fault Tree Analysis to Fuel Cell diagnosis. Fuel Cells 2012, 12, 302–309. [Google Scholar] [CrossRef]
- Dijoux, E.; Steiner, N.Y.; Benne, M.; Péra, M.-C.; Grondin-Perez, B. Fault Structural Analysis Applied to Proton Exchange Membrane Fuel Cell Water Management Issues. Electrochem 2021, 2, 38. [Google Scholar] [CrossRef]
- Li, G.; Yao, Q.; Fan, C.; Zhou, C.; Wu, G.; Zhou, Z.; Fang, X. An explainable one-dimensional convolutional neural networks based fault diagnosis method for building heating, ventilation and air conditioning systems. Build. Environ. 2021, 203, 108057. [Google Scholar] [CrossRef]
- Bouzida, A.; Touhami, O.; Ibtiouen, R.; Belouchrani, A.; Fadel, M.; Rezzoug, A. Fault Diagnosis in Industrial Induction Machines through Discrete Wavelet Transform. IEEE Trans. Ind. Electron. 2010, 58, 4385–4395. [Google Scholar] [CrossRef]
- BahooToroody, F.; Khalaj, S.; Leoni, L.; De Carlo, F.; Di Bona, G.; Forcina, A. Reliability Estimation of Reinforced Slopes to Prioritize Maintenance Actions. Int. J. Environ. Res. Public Health 2021, 18, 373. [Google Scholar] [CrossRef] [PubMed]
- Kumar, A.; Kumar, V.; Modgil, V. Behavioral study and availability optimization of a multi-state repairable system with hot redundancy. Int. J. Qual. Reliab. Manag. 2019, 36, 314–330. [Google Scholar] [CrossRef]
- Velmurugan, K.; Saravanasankar, S.; Venkumar, P.; Sudhakarapandian, R.; di Bona, G. Availability Analysis of the Critical Production System in SMEs Using the Markov Decision Model. Math. Probl. Eng. 2022, 2022, 026984. [Google Scholar]
- Kitsios, F.; Chatzidimitriou, E.; Kamariotou, M. Developing a Risk Analysis Strategy Framework for Impact Assessment in Information Security Management Systems: A Case Study in IT Consulting Industry. Sustainability 2022, 14, 1269. [Google Scholar] [CrossRef]
- Liu, H.; Zuo, H.; Jiang, C.; Qu, L. An improved algorithm for direct time-domain averaging. Mech. Syst. Signal Process. 2000, 14, 279–285. [Google Scholar]
- Shin, K. Realization of the real-time time domain averaging method using the Kalman filter. Int. J. Precis. Eng. Manuf. 2011, 12, 413–418. [Google Scholar] [CrossRef]
- Dijoux, E.; Steiner, N.Y.; Benne, M.; Péra, M.-C.; Grondin-Perez, B. Experimental Validation of an Active Fault Tolerant Control Strategy Applied to a Proton Exchange Membrane Fuel Cell. Electrochem 2022, 3, 42. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Normal Operating Conditions | Drying out Operating Condition | |
|---|---|---|
| Ifc (A) | 20 (0.4 A cm−2) | 20 (0.4 A cm−2) |
| λH2 (stoichiometry) | 2.5 | 2.5 |
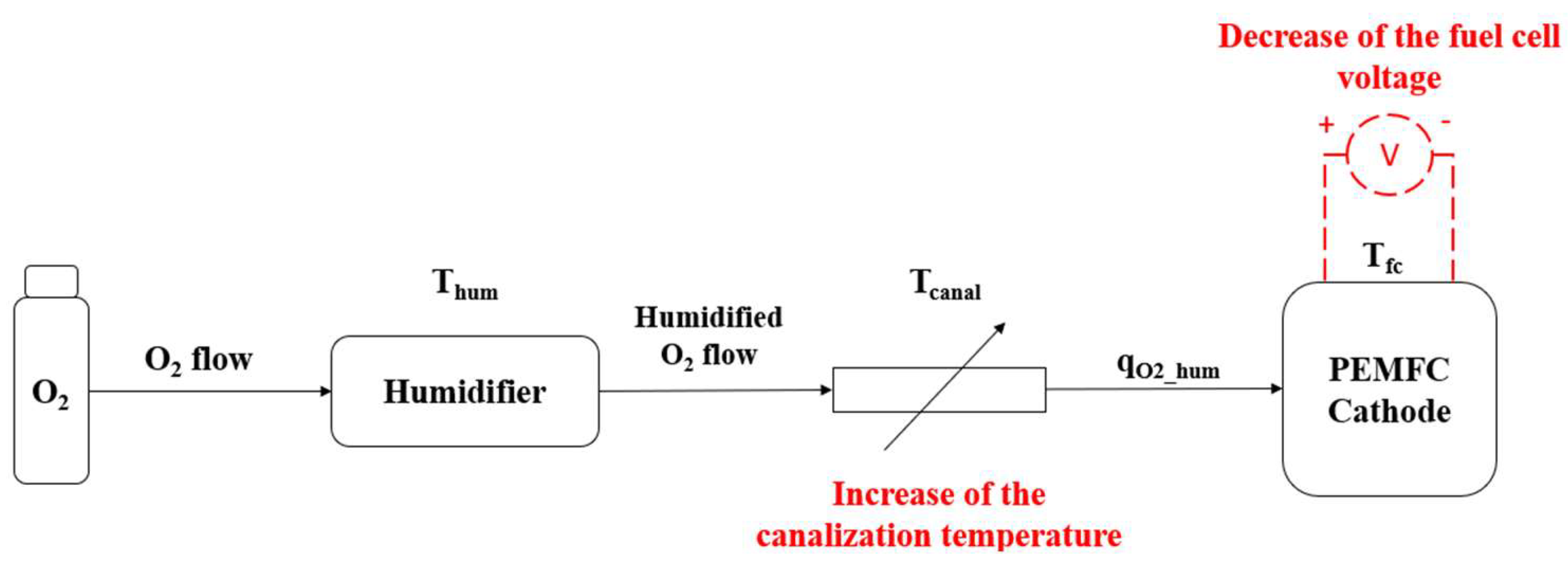
| λO2 (stoichiometry) | 3 | 10 |
| Tfc (°C) | 70 | 70 |
| Tcanal (°C) | 70 | 70 |
| Thum (°C) | 62 | 55 |
| Relative humidity (%) | 70 | 50 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dijoux, E.; Damour, C.; Benne, M.; Aubier, A. A Novel Generic Diagnosis Algorithm in the Time Domain Representation. Energies 2023, 16, 108. https://doi.org/10.3390/en16010108
Dijoux E, Damour C, Benne M, Aubier A. A Novel Generic Diagnosis Algorithm in the Time Domain Representation. Energies. 2023; 16(1):108. https://doi.org/10.3390/en16010108
Chicago/Turabian StyleDijoux, Etienne, Cédric Damour, Michel Benne, and Alexandre Aubier. 2023. "A Novel Generic Diagnosis Algorithm in the Time Domain Representation" Energies 16, no. 1: 108. https://doi.org/10.3390/en16010108
APA StyleDijoux, E., Damour, C., Benne, M., & Aubier, A. (2023). A Novel Generic Diagnosis Algorithm in the Time Domain Representation. Energies, 16(1), 108. https://doi.org/10.3390/en16010108