1. Introduction
In the actual context of increasing electricity price, one solution for energy saving is to replace some of the existing electrical motors with ones that have higher efficiency. The International Electrotechnical Committee (IEC) has defined four efficiency classes for rotating electrical machines, as follows: IE1 (standard), IE2 (high), IE3 (premium) and IE4 (super premium), all gathered under the IEC 60034-30-1 standard [
1]. In USA, the National Electrical Manufacturers Association (NEMA) has issued three efficiency classes: standard, efficient and premium, being in a consistent manner equivalent to the first three imposed by the IEC.
A higher efficiency is obtained when losses are reduced. Among those, the permanent magnet (PM) eddy current losses are addressed in [
2,
3]. In [
2], their PM losses reduction was achieved by inserting magnetic flux barriers into the rotor back iron. The solution was applied for a 12-slot/10-pole motor with fractional-slot concentrated windings in the stator. Another method for PM eddy currents losses reduction is presented in [
3] and involved an annular segmentation method. When being applied in the case of a 3 kW/3000 rpm motor, it enabled a 30% reduction in the eddy currents losses, while the registered torque reduction was 1.3%.
Another category of losses that can be reduced are the magnetic iron losses. If instead of non-oriented silicon steel the stator core is made of a monocrystalline magnetic material, the total iron losses can be reduced by 64% to 75%, as stated in [
4]. The investigated motor had 8 poles and 12 slots, and used buried sintered neodymium iron boron (NdFeB) magnets. A similar approach is provided in [
5], where to obtain a lightweight structure, soft magnetic alloy (HiperCo50) was used for the motor core. Three design versions were developed in the case of a 10 kW/9000 rpm motor with surface mounted magnets from samarium cobalt. An additional method to improve the motor output characteristics, a hybrid-type PM, is proposed in [
6], which used both neodymium and hard magnetic ferrites. In the case of a 5 kW/2000 rpm motor, it registered 92.1% efficiency.
The optimization of PM motors is often achieved through particular design features. The influence of specific geometrical parameters such as a magnetic bridge and the angle between the two magnets under each pole in the case of a V-shaped motor is investigated in [
7]. A novel Y-type rotor topology is proposed in [
8] in the case of a 30 kW motor with fractional-slot concentrated winding (FSCW) with 12 slots/10 poles. It was found that this particular rotor design enabled a decrease in the torque ripple without impacting on the motor torque density. Additionally on the design side, five different rotor shapes are investigated in [
9], in the case of a motor with 48 slots and a 200 mm stator outer diameter. The best results in terms of output torque, efficiency and torque ripple were achieved by the rotor with the smallest magnet volume. A similar approach was followed by the authors of [
10], this time in the case of a 2 kW/1500 rpm motor for a small electrical vehicle (E-rickshaw). Among the seven different rotor topologies, a modified V-shaped one proved to be the most efficient. In the case of a spoke-type PMSM, a wedge-shaped barrier was used to maximize the air gap magnetic flux density and torque [
11]. A 408 W prototype delivering 1.12 Nm at 3480 rpm was developed in this regard. In the case of a 6 HP/1775 rpm motor with internal PM, a flux barrier was added in such a manner that the magnet and reluctance torques in the machine reached their maximum values at the same torque angle [
12]. This particular configuration is beneficial in transportation applications, as the machine provides higher torque when operating in forward motor mode and lower torque when braking (or operates in forward generating mode).
In terms of efficient operation, one of the main drawbacks of any PMSM is the cogging torque. This issue is addressed in [
13], in the case of a motor with 28 magnets mounted on the rotor surface. Cogging torque reduction was achieved both by decreasing the size of the slot opening and through an asymmetrical distribution of the permanent magnets.
In the field of PMSM optimization and design, various approaches/methodologies have been used throughout the literature. For example, the authors of [
14] aimed at finding the optimal motor geometry that better suits a targeted torque–speed–efficiency map, by using a particular algorithm. The particle swarm optimization technique is used in [
15], in the case of a surface-mounted PM motor with 4 poles and 24 stator slots. It aimed at optimizing the magnet’s dimensions to increase the air gap flux density. An automated design of experiments (DOE) procedure was used in conjunction with finite element analysis in the case of a 15 kW motor with eight poles to optimize the torque without affecting the efficiency and torque ripple [
16]. A novel heuristic algorithm was used in the case of a motor with symmetrical multiphase concentrated windings for average torque maximization [
17]. The authors showed that starting from the number of phases and slot/pole combinations, their methodology could provide alternative winding configurations that ensured the same average torque and reduced torque ripple, in the case of a 2.65 kW motor. In the case of an FSCW-PMSM with surface-mounted magnets, a generic multi-objective optimization design framework was used to develop a motor that maintained constant power over a wide speed range [
18]. This approach analysed the machine geometry, spatial and temporal electromagnetic fields and various loss categories.
The present paper addresses a very actual issue: that of a motor’s optimization to fall within superior efficiency classes. More precisely, it focuses on developing several virtual prototypes for a 3 kW/1500 rpm PMSM that comply with the IE4 efficiency class requirements. After the introduction, the paper is organized as follows:
Section 2 details the PMSM design part and
Section 3 analyses the simulation results, while
Section 4 presents the main paper conclusions.
3. Simulation Results and Discussion
After the initial calculations were finished, the motor data were introduced into FluxMotor software from Altair to build the initial prototype to be simulated. As well as the magnets’ characteristics (given in
Table 2), the specific values for the steel were also introduced. The M350-50A steel type was used, which has specific losses of 1.5 W/kg.
Since the initial simulation results were not satisfactory in terms of the obtained power/mechanical parameters, several fine changes were made to the geometrical parameters, namely, variations in the stator inner/rotor outer diameters, the stator slot geometry, the wire diameter and the magnets’ distance relative to the rotor outer periphery. Thus, the first optimized version of the motor was obtained that is hereafter mentioned as VP1. The new geometrical parameters are given in
Table 5, detailed winding parameters in
Table 6 and main performance parameters in
Table 7, while
Figure 2 shows cross-sectional views of both the rotor and stator, along with the magnetic flux density distribution. It must be mentioned that, in parallel, additional measures were taken to reduce the electromagnetic torque ripple as much as possible through changes in the shape/dimension of the stator slot opening and the magnets’ placement in the rotor.
Compared to the initial design of the motor, the VP1 version has smaller stator inner/rotor outer diameters (97.8 vs. 113.6 mm/95.6 vs. 102 mm) and a smaller number of conductors per slot (52 vs. 57). Regarding the stator slot shape, it kept its configuration, gained in height and lost in width. Nevertheless, this enabled the nominal mechanical quantities (power/torque/speed) to be obtained, along with an efficiency value of 95.7%, higher than the targeted value of 90.4%. On the other hand, the torque ripple was quite high (i.e., 21.15% from the nominal one).
One of the goals of the collaboration with the manufacturing company was to provide six possible design versions for the 3 kW/1500 rpm PMSM. This had as a result the design and simulation of five more motor versions, that are further labeled from VP2 to VP6. For the second variant (VP2), the main change took place in the number of stator slots, which was increased by 50%, from 24 to 36. The higher number of slots implied a reduction in their width and a lower filling factor but ensured a high efficiency (i.e., 94.5%) and a torque ripple (11.61%) almost half compared to that of the VP1 version.
The VP3 version was derived from VP1 (as the number of stator slots was kept constant) and the main change was on the magnets’ placement, which this time formed a V shape. This new arrangement required the increase in the rotor diameter (from 95.6 to 110 mm) and a similar efficiency (95.8 vs. 95.7%), but also a higher torque ripple (27.87 vs. 21.15%).
The VP4 version was derived from VP3 and aimed towards seeing if by implementing a double V shape, in terms of the magnets’ arrangement, any improvements could be obtained. It resulted in a reduction in the required copper quantity, as the conductor diameter was 0.8 mm instead of 1.1 mm (for the same number of conductors per slot), a decrease in the torque ripple (19.03 vs. 27.87%) and lower efficiency (93.7 vs. 95.8%).
The VP5 version was derived from VP1 and magnets with different dimensions (33.75 mm × 29 mm × 4.5 mm instead of 35 mm × 26 mm × 4 mm) were considered; their magnetic properties remained the same. This resulted in a reduced stack length (101.25 vs. 105 mm) but also in a higher rotor outer diameter (106 vs. 95.6 mm) to accommodate wider magnets. On the performance side, a small decrease was found in the overall efficiency (95.2 vs. 95.7%) but also a higher torque ripple (29.74 vs. 21.15%).
The last variant (VP6) introduced a rounded semi-closed shape for the stator slot compared to VP5. It required an increase in the slot number (from 24 to 36) but most importantly a longer stack length (135 vs. 101.25 mm) because four instead of three magnets were needed to obtain the targeted nominal mechanical parameters. Regarding the efficiency, the 94.5% obtained value was higher than the required one of 90.4%; also, it recorded the lowest value of torque ripple among all the variants (i.e., 7.53%).
In the case of the magnetic flux distribution within the motor, the simulation results showed that all versions (excepting VP1) exhibited values for the back core and tooth that are in agreement with the imposed ones in the design process.
The average torque values for all VPs are well within a narrow interval around the targeted value of 19.1 Nm, with the lowest in the case of VP1 (19.04 Nm) and the highest in the case of VP2 (19.3 Nm). For a better comparison, the torque ripples for each of the six virtual prototypes are highlighted with the help of
Figure 3, ranging from 11.61% in the case of VP2 to 29.75% in the case of VP5. The cogging torque was also analyzed, and for a clearer comparison, the maximum values are given in
Figure 4. It can be seen that VP1 and VP2 have the lowest values (i.e., 0.35 Nm), while on the other extreme is found VP4 with a value of 0.8 Nm.
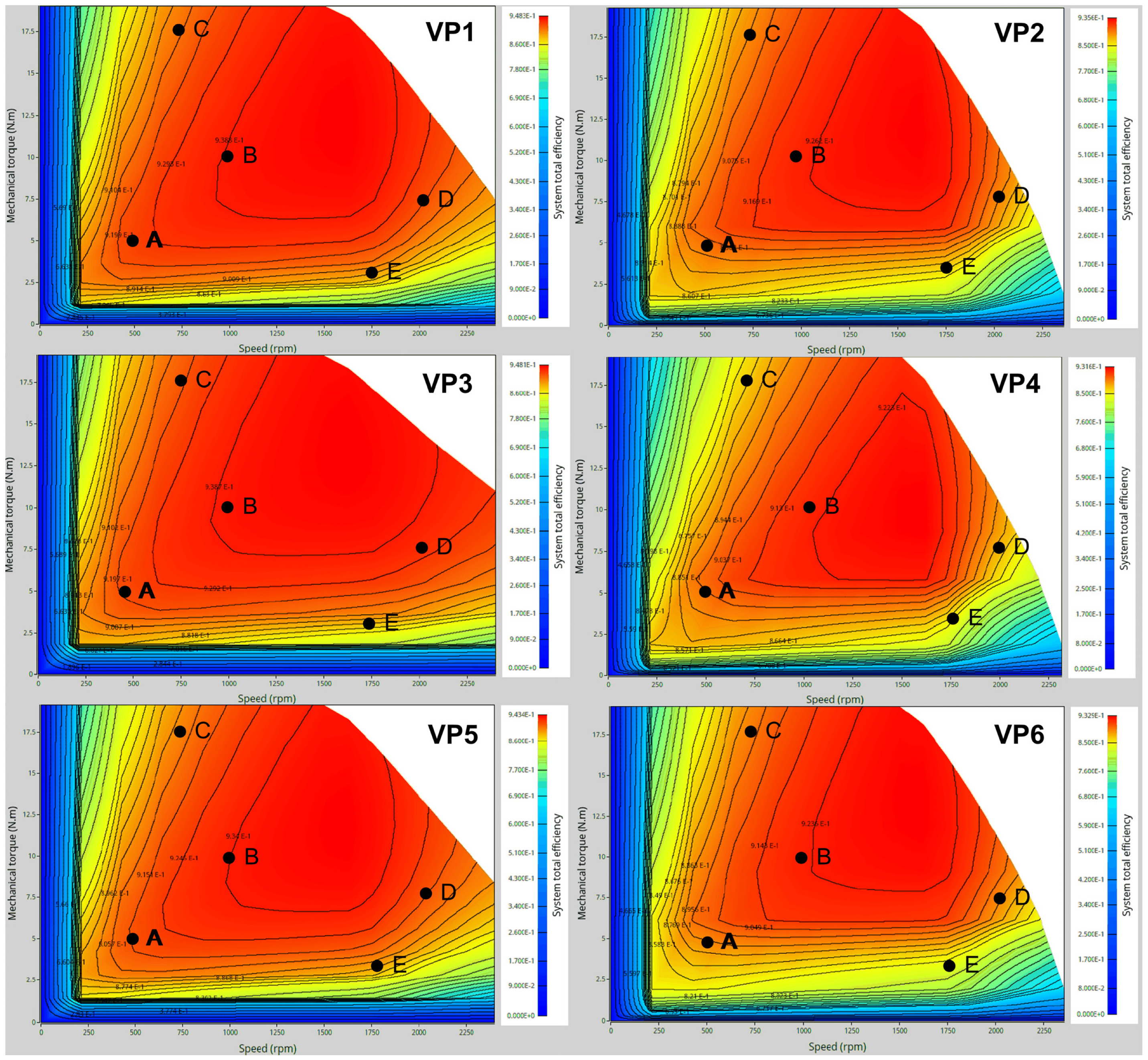
Even though all virtual prototypes have efficiency values over the targeted one, torque–speed–efficiency maps were obtained with the help of FluxMotor software and are presented in
Figure 5. Five randomly chosen points (A, B, C, D, E) were considered to compare the efficiency maps.
Table 8 shows the values for rotational speed, torque and efficiency corresponding to each point. It can be noticed that VP1 and VP3 have the highest overall efficiency values for the considered points.
4. Conclusions
This paper presents the design and simulation steps required for a 3 kW PMSM motor with two pole pairs to come under the IE4 efficiency class. As it is the result of collaboration between a university and an electrical motor manufacturing company within a research project, the latter imposed the values for the outer stator/inner rotor diameters, and also the type and size of the magnets. Six virtual prototypes were developed and simulated using the Altair FluxMotor software.
The first requirement for all virtual prototypes was to provide the targeted mechanical power (i.e., 3 kW) and consequently the nominal torque of 19.1 Nm. To obtain an efficiency value of at least 90.4% at the nominal operating point, fine changes were made to the geometrical parameters, namely, variations in the stator inner/rotor outer diameters, the stator slot geometry, the wire diameter and the magnets’ distance relative to the rotor outer periphery. Out of the six virtual prototypes, four had an interior PM, one had a V-shaped PM and one a double V-shaped PM. The stack length was adapted to host either three magnets of 35 mm in series (for the first four virtual prototypes), three magnets of 33.5 mm (VP5) or four magnets of 33.5 mm (VP6).
Additional measures were taken to reduce the electromagnetic torque ripple as much as possible through changes in the shape/dimension of the stator slot opening and the magnets’ placement in the rotor. Among the six virtual prototypes, the best overall performance for the nominal operating point was obtained for the versions with 36 stator slots and interior PM (labeled in text as VP2), which reached a nominal efficiency of 94.5% and a torque ripple of 11.61%, along with a reduced total mass (i.e., 17.6 kg). Nevertheless, when analyzing the torque–speed–efficiency maps, the VP1 and VP3 versions had the optimal behavior. Among these latter two, VP1 had lower iron losses (21 vs. 32 W), a lower torque ripple (21.15 vs. 27.87%), a smaller mass (18 vs. 19 kg) and a simpler rotor design.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}