




Noise in Electric Motors: A Comprehensive Review


Abstract
:1. Introduction
2. Acoustics and Noise Principles
2.1. Decibel Unit, Types A, B and C
2.2. Audible Spectrum. Octaves
2.3. Acoustic Pressure and Acoustic Power
2.4. Standards
- IEC 60034-9: Noise limits on rotating electrical machines.
- IEC 60034-14: Mechanical vibrations.
- ISO 1680: Test code for the measurement of airborne noise emitted by rotating electrical machinery.
- ISO 3740: Determination of sound power levels of noise sources. Guide for the use of basic standards.
3. Noise Sources in Electric Motors
- Of aerodynamic origin,
- Of mechanical origin, and
- Of electromagnetic origin.
3.1. Mechanical and Aerodynamic Noise
3.2. Electromagnetic Noise
3.2.1. Electromagnetic Forces
3.2.2. Natural Frequencies and Vibration Modes
3.2.3. Power Supply Control of the Electric Motor
3.2.4. Winding Influence
3.2.5. Noise in Induction Motors
3.2.6. Noise in PMMs
3.2.7. Noise in AFMs
4. Modeling, Analysis, and Calculation of Noise in Electric Motors
- Analytical calculations,
- Numerical calculations, and
- Semi-analytical calculations.
4.1. Natural Frequencies
4.2. Electromagnetic Forces
- Exact subdomain analysis,
- The magnetic equivalent circuit,
- Maxwell’s Tensor,
- The winding function approach,
- The conformal mapping method, and
- The virtual work principle.
4.2.1. Maxwell’s Tensor (MT)
4.2.2. The Virtual Work Principle (VWP)
4.3. Noise and Vibration Calculation
4.3.1. Analytical Calculations
4.3.2. Numerical Calculations
4.3.3. Semi-Analytical Calculations
5. Noise Reduction Methods
5.1. Noise Reduction in Induction Motors
5.2. Noise Reduction in PMMs
5.3. Noise Reduction in AFMs
5.4. Direct Noise Reduction Methods
6. Noise Measurement
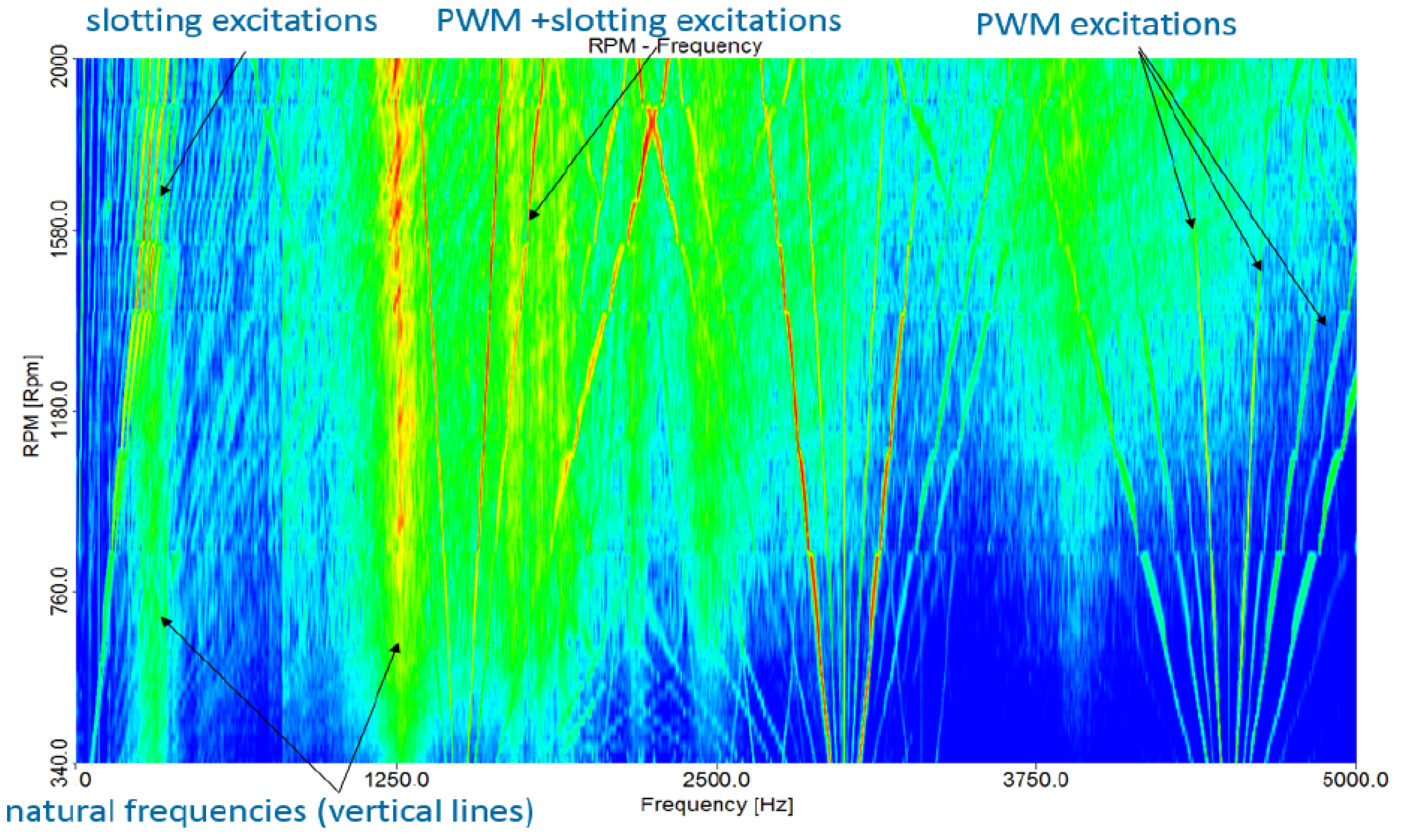
- y-axis: time, rotational speed, or supply frequency of the machine.
- x-axis: vibration frequency.
- z-axis: magnitude of vibration (displacement, velocity, or acceleration), in radial or tangential direction.
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hillhouse, J. Basic sound level knowledge for electric motor application. In Proceedings of the 2010 Record of Conference Papers Industry Applications Society 57th Annual Petroleum and Chemical Industry Conference (PCIC), San Antonio, TX, USA, 20–22 September 2010; pp. 1–8. [Google Scholar]
- Gieras, J.; Wang, C.; Lai, J. Noise of Polyphase Electric Motors; Taylor & Francis Group: Boca Ratón, FL, USA, 2005. [Google Scholar]
- Lara, F.R.; Jiménez-Romero, R.; Pérez-Hidalgo, F.; Redel-Macías, M.D. Influence of constructive parameters and power signals on sound quality and airborne noise radiated by Inverter-Fed Induction Motors. Measurement 2015, 73, 503–514. [Google Scholar] [CrossRef]
- Vijayraghavan, P.; Krishnan, R. Noise in electric machines: A review. IEEE Trans. Ind. Appl. 1999, 35, 1007–1013. [Google Scholar] [CrossRef]
- Finley, W. Noise in induction motors--Causes and treatments. IEEE Trans. Ind. Appl. 1990, 27, 55–63. [Google Scholar] [CrossRef]
- Tischmacher, H.; Tsoumas, I.; Eichinger, B.; Werner, U. Case studies of acoustic noise emission from inverter-fed asynchronous machines. In Proceedings of the XIX International Conference on Electrical Machines—ICEM 2010, Rome, Italy, 6–8 September 2010; pp. 1–8. [Google Scholar]
- Wang, C.; Astfalck, A.; Lai, J. Sound power radiated from an inverter-driven induction motor: Experimental investigation. IEEE Proc.-Electr. Power Appl. 2002, 149, 46–52. [Google Scholar] [CrossRef]
- Lo, E.; Chan, C.C.; Zhu, Z.Q.; Xu, L.; Howe, D.; Chau, K.T. Acoustic noise radiated by PWM-controllel induction machine drives. IEEE Trans. Ind. Electron. 2000, 47, 880–889. [Google Scholar] [CrossRef] [Green Version]
- Ellison, A.; Yang, S. Effect of rotor eccentricity on acoustic noise from induction motor. Proc. Inst. Electr. Eng. 1971, 118, 174–184. [Google Scholar] [CrossRef]
- Kim, D.-J.; Kim, H.j.; Hong, J.P.; Chuljun, P. Estimation of Acoustic Noise and Vibration in an Induction Machine Considering Rotor Eccentricity. IEEE Trans. Magn. 2014, 50, 857–860. [Google Scholar] [CrossRef]
- Xu, X.; Han, Q.; Chu, F. Review of Electromagnetic Vibration in Electrical Machines. Energies 2018, 11, 1779. [Google Scholar] [CrossRef] [Green Version]
- Amor, A.; Timar, P.L.; Poloujadoff, M. Induction squirrel cage machine design with minimization of electromagnetic noise. IEEE Trans. Energy Convers. 1996, 10, 681–687. [Google Scholar] [CrossRef]
- Souron, Q.; Le Besnerais, J.; Hecquet, M. Analysis of electromagnetically-induced vibrations of electrical machines based on spatiogram technique. In Proceedings of the XVII International Symposium on Electromagnetic Fields in Mechatronics, Electrical and Electronic Engineering, Valencia, Spain, 10–12 September 2015; pp. S23–S32. [Google Scholar]
- Weilharter, B.; Biro, O.; Rainer, S. Numerical investigation of the 3D vibrational behaviour of skewed induction machines due to rotating force waves. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2012, 31, 1503–1512. [Google Scholar] [CrossRef]
- Alger, P.L. The Magnetic Noise of Polyphase Induction Motors [includes discussion]. In Transactions of the American Institute of Electrical Engineers. Part III: Power Apparatus and Systems; IEEE: Piscataway, NJ, USA, 1954; Volume 73. [Google Scholar] [CrossRef]
- Valavi, M.; Nysveen, A.; Nilssen, R. Characterization of radial magnetic forces in low-speed permanent magnet wind generator with non-overlapping concentrated windings. In Proceedings of the 2012 XXth International Conference on Electrical Machines, Marseille, France, 2–5 September 2012; pp. 2943–2948. [Google Scholar]
- Benbouzid, M.; Reyne, G.; Dérou, S.; Foggia, A. Finite element modeling of a synchronous machine: Electromagnetic forces and modes shapes. IEEE Trans. Magn. 1993, 29, 2014–2018. [Google Scholar] [CrossRef]
- Valavi, M.; Nysveen, A.; Nilssen, R.; Rolvag, T. Slot Harmonic Effect on Magnetic Forces and Vibration in Low-Speed Permanent-Magnet Machine With Concentrated Windings. IEEE Trans. Ind. Appl. 2014, 50, 3304–3313. [Google Scholar] [CrossRef]
- Le Besnerais, J. Vibro-Acoustic Analysis of Radial and Tangential Airgap Magnetic Forces in Permanent Magnet Synchronous Machines. IEEE Trans. Magn. 2014, 51, 8105609. [Google Scholar] [CrossRef]
- Lan, H.; Zou, J.; Xu, Y.; Zhao, B. Analysis of Global and Local Force Harmonics and Their Effects on Vibration in Permanent Magnet Synchronous Machines. IEEE Trans. Energy Convers. 2017, 32, 1523–1532. [Google Scholar] [CrossRef]
- Ellison, A.J.; Moore, C.J. Acoustic noise and vibration of rotating electric machines. Proc. Inst. Electr. Eng. 1968, 115, 1633–1640. [Google Scholar] [CrossRef]
- Saito, A.; Suzuki, H.; Kuroishi, M.; Nakai, H. Efficient forced vibration reanalysis method for rotating electric machines. J. Sound Vib. 2015, 334, 388–403. [Google Scholar] [CrossRef]
- Devillers, E.; Hecquet, M.; Le Besnerais, J.; Régniez, M. Tangential effects on magnetic vibrations and acoustic noise of induction machines using subdomain method and electromagnetic vibration synthesis. In Proceedings of the 2017 IEEE International Electric Machines and Drives Conference (IEMDC), Miami, FL, USA, 21–24 May 2017; pp. 1–8. [Google Scholar]
- Zuo, S.; Lin, F.; Wu, X. Electromagnetic Vibration and Noise Analysis of Permanent Magnet Synchronous Motor with Different Slot-pole Combinations. IET Electr. Power Appl. 2016, 10, 900–908. [Google Scholar] [CrossRef]
- Noda, S.; Mori, S.; Ishibashi, F.; Itomi, K. Effect of Coils on Natural Frequencies of Stator Cores in Small Induction Motors. IEEE Trans. Energy Convers. 1987, EC-2, 93–99. [Google Scholar] [CrossRef]
- Cristian, D.; Cassoret, B.; Brudny, J.-F.; Belgrand, T. AC Magnetic Circuits Using Nonsegmented Shifted Grain Oriented Electrical Steel Sheets: Impact on Induction Machine Magnetic Noise. IEEE Trans. Magn. 2012, 48, 1409–1412. [Google Scholar] [CrossRef]
- Watanabe, S.; Kenjo, S.; Ide, K.; Sato, F.; Yamamoto, M. Natural Frequencies and Vibration Behaviour of Motor Stators. IEEE Trans. Power Appar. Syst. 1983, PAS-102, 949–956. [Google Scholar] [CrossRef]
- Cai, W.; Pillay, P.; Tang, Z. Impact of stator windings and end-bells on resonant frequencies and mode shapes of switched reluctance motors. IEEE Trans. Ind. Appl. 2002, 38, 1027–1036. [Google Scholar] [CrossRef] [Green Version]
- Le Besnerais, J.; Fasquelle, A.; Hecquet, M.; Lanfranchi, V.; Brochet, P. A Fast Noise-Predictive Multiphysical Model of the PWM-controlled Induction Machine. In Proceedings of the International Conference on Electrical Machines (ICEM’06), Chania, Greece, 2–5 September 2006. [Google Scholar]
- Le Besnerais, J. Reduction of Magnetic Noise in PWM-Supplied Induction Machines-Low-Noise Design Rules and Multi-Objective Optimisation. Ph.D. Thesis, Ecole Centrale de Lille, Villeneuve-d’Ascq, France, 2008. [Google Scholar]
- Kaku, B.; Miyashita, I.; Sone, S. A novel prediction method of acoustic magnetic noise based on induction motor’s NHCC function. IEEE Trans. Ind. Electron. 1999, 46, 398–406. [Google Scholar] [CrossRef]
- Nau, S.L.; Mello, H.G.G. Acoustic noise in induction motors: Causes and solutions. In Proceedings of Record of Conference Papers. Industry Applications Society Forty-Seventh Annual Conference. 2000 Petroleum and Chemical Industry Technical Conference (Cat. No.00CH37112); IEEE: Piscataway, NJ, USA, 2000; pp. 253–263. [Google Scholar]
- Zhihuan, S.; Renyuan, T.; Shenbo, Y.; Hongyang, Z. The influence of vibration and acoustic noise of axial flux permanent magnet machines by inverter. In Proceedings of the 2010 International Conference on Mechanic Automation and Control Engineering, Wuhan, China, 26–28 June 2010; pp. 2423–2426. [Google Scholar]
- Xu, L.; Zhu, Z.Q.; Howe, D. Acoustic noise radiated from direct torque controlled induction motor drives. IEE Proc. -Electr. Power Appl. 2000, 147, 491–496. [Google Scholar] [CrossRef]
- Bouyahi, H.; Ben Smida, K.; Khedher, A. Experimental study of PWM strategy effect on acoustic noise generated by inverter-fed induction machine. Int. Trans. Electr. Energy Syst. 2019, 30, e12249. [Google Scholar] [CrossRef]
- Kumar, A.C.B.; Narayanan, G. Variable-Switching Frequency PWM Technique for Induction Motor Drive to Spread Acoustic Noise Spectrum With Reduced Current Ripple. IEEE Trans. Ind. Appl. 2016, 52, 3927–3938. [Google Scholar] [CrossRef]
- Singh, G.K. A research survey of induction motor operation with non-sinusoidal supply wave forms. Electr. Power Syst. Res. 2005, 75, 200–213. [Google Scholar] [CrossRef]
- Xu, Y.; Yuan, Q.; Zou, J.; Li, Y. Analysis of Triangular Periodic Carrier Frequency Modulation on Reducing Electromagnetic Noise of Permanent Magnet Synchronous Motor. IEEE Trans. Magn. 2012, 48, 4424–4427. [Google Scholar] [CrossRef]
- Nistor, C.G.; Plesa, O.I.; Scutaru, G.; Peter, I.; Ionescu, R.M. Numerical modeling of magnetic noise for three phase asynchronous motors through the software Flux 2D. In Proceedings of the 2012 International Conference on Applied and Theoretical Electricity (ICATE), Craiova, Romania, 25–27 October 2012; pp. 1–4. [Google Scholar]
- Ionescu, R.M.; Munteanu, A. A comparative study of the winding type influence on the noise level of two-speed three-phase induction motors. In Proceedings of the 2014 International Conference on Optimization of Electrical and Electronic Equipment (OPTIM), Cheile Gradistei, Romania, 22–24 May 2014; pp. 458–465. [Google Scholar]
- Güemes, J.; Iraolagoitia, A.; Fernández, P.; Donsión, M. Comparative study of PMSM with integer-slot and fractional-slot windings. In Proceedings of the XIX International Conference on Electrical Machines-ICEM 2010, Rome, Italy, 6–8 September 2010; pp. 1–6. [Google Scholar]
- Deng, W.; Zuo, S. Electromagnetic Vibration and Noise of the Permanent Magnet Synchronous Motors for Electric Vehicles: An Overview. IEEE Trans. Transp. Electrif. 2018, 5, 59–70. [Google Scholar] [CrossRef]
- Valavi, M.; Nysveen, A.; Nilssen, R. Magnetic forces and vibration in permanent magnet machines with non-overlapping concentrated windings: A review. In Proceedings of the 2012 IEEE International Conference on Industrial Technology, ICIT 2012, Athens, Greece, 19–21 March 2012. [Google Scholar] [CrossRef]
- Li, Z.; Di, C.; Bao, X. Analysis of vibration and noise of induction motor equipped with concentric single-double-layer star-delta winding. Chin. J. Electr. Eng. 2019, 5, 36–46. [Google Scholar] [CrossRef]
- Devillers, E.; Le Besnerais, J.; Souron, Q.; Hecquet, M. Characterization of acoustic noise and vibrations due to magnetic forces in induction machines for transport applications using MANATEE software. In Proceedings of ISMA; ISMA: Leuven, Belgium, 2016. [Google Scholar]
- Le Besnerais, J.; Lanfranchi, V.; Hecquet, M.; Lemaire, G.; Augis, E.; Brochet, P. Characterization and Reduction of Magnetic Noise Due to Saturation in Induction Machines. IEEE Trans. Magn. 2009, 45, 2003–2008. [Google Scholar] [CrossRef]
- Delaere, K.; Belmans, R.; Hameyer, K. Influence of rotor slot wedges on stator currents and stator vibration spectrum of induction machines: A transient finite-element analysis. IEEE Trans. Magn. 2003, 39, 1492–1494. [Google Scholar] [CrossRef]
- Kron, G. Induction Motor Slot Combinations Rules to Predetermine Crawling, Vibration, Noise and Hooks in the Speed-Torque Curve. Trans. Am. Inst. Electr. Eng. 1931, 50, 757–767. [Google Scholar] [CrossRef]
- Cheraghi, M.; Karimi, M.; Booin, M.B. An investigation on acoustic noise emitted by induction motors due to magnetic sources. In Proceedings of the 2018 9th Annual Power Electronics, Drives Systems and Technologies Conference (PEDSTC), Tehran, Iran, 13–15 February 2018; pp. 104–109. [Google Scholar]
- Cassoret, B.; Lecointe, J.P.; Brudny, J.F. Influence of the pole number on the magnetic noise of electrical ac machines. Prog. Electromagn. Res. B 2011, 33, 83–97. [Google Scholar] [CrossRef] [Green Version]
- Asano, Y.; Honda, Y.; Murakami, H.; Takeda, Y.; Morimoto, S. Novel noise improvement technique for a PMSM with concentrated winding. In Proceedings of the Power Conversion Conference-Osaka 2002 (Cat. No.02TH8579), Osaka, Japan, 2–5 April 2002; Volume 462, pp. 460–465. [Google Scholar]
- Islam, M.S.; Islam, R.; Sebastian, T. Noise and Vibration Characteristics of Permanent-Magnet Synchronous Motors Using Electromagnetic and Structural Analyses. IEEE Trans. Ind. Appl. 2014, 50, 3214–3222. [Google Scholar] [CrossRef]
- Boesing, M.; De Doncker, R. Exploring a vibration synthesis process for the acoustic characterization of electric drives. IEEE Trans. Ind. Appl. 2012, 48, 70–78. [Google Scholar] [CrossRef]
- Verez, G.; Barakat, G.; Amara, Y.; Hoblos, G. Impact of Pole and Slot Combination on Vibrations and Noise of Electromagnetic Origins in Permanent Magnet Synchronous Motors. IEEE Trans. Magn. 2015, 51, 8101104. [Google Scholar] [CrossRef]
- Jang, G.H.; Lieu, D.K. The effect of magnet geometry on electric motor vibration. IEEE Trans. Magn. 1991, 27, 5202–5204. [Google Scholar] [CrossRef]
- Krotsch, J.; Piepenbreier, B. Radial Forces in External Rotor Permanent Magnet Synchronous Motors With Non-Overlapping Windings. IEEE Trans. Ind. Electron. 2012, 59, 2267–2276. [Google Scholar] [CrossRef]
- Hao, Z.; Ma, Y.; Wang, P.; Luo, G.; Chen, Y. A Review of Axial-Flux Permanent-Magnet Motors: Topological Structures, Design, Optimization and Control Techniques. Machines 2022, 10, 1178. [Google Scholar] [CrossRef]
- Credo, A.; Tursini, M.; Villani, M.; Di Lodovico, C.; Orlando, M.; Frattari, F. Axial Flux PM In-Wheel Motor for Electric Vehicles: 3D Multiphysics Analysis. Energies 2021, 14, 2107. [Google Scholar] [CrossRef]
- Lu, M.H.; Jen, M.U. Acoustic characteristics concerning construction and drive of axial-flux motors for electric bicycles. In Proceedings of the 2013 World Electric Vehicle Symposium and Exhibition (EVS27), Barcelona, Spain, 17–20 November 2013; pp. 1–8. [Google Scholar]
- Wang, W.; Wang, H.; Karimi, H. Study on the Characteristics of Electromagnetic Noise of Axial Flux Permanent Magnet Synchronous Motor. Abstr. Appl. Anal. 2014, 2014, 764105. [Google Scholar] [CrossRef] [Green Version]
- Deng, W.; Zuo, S.; Lin, F.; Wu, S. Influence of Pole and Slot Combinations on Vibration and Noise in External Rotor Axial Flux in-Wheel Motors. IET Electr. Power Appl. 2017, 11, 586–594. [Google Scholar] [CrossRef]
- Slutskiy, D.; Aung, S.H.; Basnet, S. Comparison of Axial and Radial Flux Permanent Magnet Machines. In Proceedings of the 2022 North American Power Symposium (NAPS), Salt Lake City, UT, USA, 9–11 October 2022; pp. 1–6. [Google Scholar]
- Haodong, Y.; Chen, Y. Influence of Radial Force Harmonics With Low Mode Number on Electromagnetic Vibration of PMSM. IEEE Trans. Energy Convers. 2014, 29, 38–45. [Google Scholar] [CrossRef]
- Lecointe, J.P.; Romary, R.; Brudny, J.F.; Czapla, T. Five methods of stator natural frequency determination: Case of induction and switched reluctance machines. Mech. Syst. Signal Process. 2004, 18, 1133–1159. [Google Scholar] [CrossRef]
- Li, Q. A novel analytical method of calculating of stator natural frequency for axial flux permanent magnet machines. In Proceedings of the 2011 International Conference on Electrical Machines and Systems, Beijing, China, 20–23 August 2011; pp. 1–3. [Google Scholar]
- Boisson, J.; Louf, F.; Ojeda, J.; Mininger, X.; Gabsi, M. Analytical Approach for Mechanical Resonance Frequencies of High-Speed Machines. IEEE Trans. Ind. Electron. 2014, 61, 3081–3088. [Google Scholar] [CrossRef]
- McCloskey, A.; Arrasate, X.; Hernández, X.; Gómez, I.; Almandoz, G. Analytical calculation of vibrations of electromagnetic origin in electrical machines. Mech. Syst. Signal Process. 2018, 98, 557–569. [Google Scholar] [CrossRef]
- Xing, Z.; Wang, X.; Zhao, W. An Accurate Calculation Method of Natural Frequencies of the Radial-Flux Slotted Motors Considering End Covers. IEEE Trans. Ind. Electron. 2023, 70, 5516–5526. [Google Scholar] [CrossRef]
- Torregrossa, D.; Peyraut, F.; Fahimi, B.; M’Boua, J.; Miraoui, A. Multiphysics Finite-Element Modeling for Vibration and Acoustic Analysis of Permanent Magnet Synchronous Machine. IEEE Trans. Energy Convers. 2011, 26, 490–500. [Google Scholar] [CrossRef]
- Deng, W.; Zuo, S. Analytical Modeling of the Electromagnetic Vibration and Noise for an External Rotor Axial Flux in-Wheel Motor. IEEE Trans. Ind. Electron. 2018, 65, 1991–2000. [Google Scholar] [CrossRef]
- Pile, R.; Devillers, E.; Le Besnerais, J. Comparison of Main Magnetic Force Computation Methods for Noise and Vibration Assessment in Electrical Machines. IEEE Trans. Magn. 2018, 54, 8104013. [Google Scholar] [CrossRef] [Green Version]
- Pile, R.; Le Besnerais, J.; Parent, G.; Devillers, E.; Henneron, T.; Le Menach, Y.; Lecointe, J.-P. Analytical study of air-gap surface force -application to electrical machines. Open Phys. 2020, 18, 658–673. [Google Scholar] [CrossRef]
- Le Besnerais, J.; Lanfranchi, V.; Hecquet, M.; Brochet, P. Multiobjective Optimization of Induction Machines Including Mixed Variables and Noise Minimization. IEEE Trans. Magn. 2008, 44, 1102–1105. [Google Scholar] [CrossRef]
- Weilharter, B.; Biro, O.; Lang, H.; Ofner, G.; Rainer, S. Validation of a Comprehensive Analytic Noise Computation Method for Induction Machines. IEEE Trans. Ind. Electron. 2012, 59, 2248–2257. [Google Scholar] [CrossRef]
- Sathyan, S.; Aydin, U.; Belahcen, A. Acoustic Noise Computation of Electrical Motors Using the Boundary Element Method. Energies 2020, 13, 245. [Google Scholar] [CrossRef] [Green Version]
- Zuo, S.; Lin, F.; Wu, X. Noise Analysis, Calculation, and Reduction of External Rotor Permanent-Magnet Synchronous Motor. IEEE Trans. Ind. Electron. 2015, 62, 6204–6212. [Google Scholar] [CrossRef]
- Lin, F.; Zuo, S.; Deng, W.; Wu, S. Modeling and Analysis of Electromagnetic Force, Vibration and Noise in Permanent Magnet Synchronous Motor Considering Current Harmonics. IEEE Trans. Ind. Electron. 2016, 63, 7455–7466. [Google Scholar] [CrossRef]
- Deng, W.; Zuo, S. Axial Force and Vibroacoustic Analysis of External Rotor Axial Flux Motors. IEEE Trans. Ind. Electron. 2017, 65, 2018–2030. [Google Scholar] [CrossRef]
- Park, S.; Kim, W.; Kim, S.-I. A Numerical Prediction Model for Vibration and Noise of Axial Flux Motors. IEEE Trans. Ind. Electron. 2014, 61, 5757–5762. [Google Scholar] [CrossRef]
- Wang, C.; Lai, J.; Pulle, D.W.J. Prediction of acoustic noise from variable-speed induction motors: Deterministic versus statistical approaches. IEEE Trans. Ind. Appl. 2002, 38, 1037–1044. [Google Scholar] [CrossRef]
- Delaere, K.; Iadevaia, M.; Heylen, W.; Sas, P.; Hameyer, K.; Beimans, R. Statistical energy analysis of acoustic noise and vibration for electric motors: Transmission from air gap field to motor frame. In Proceedings of the Conference Record of the 1999 IEEE Industry Applications Conference. Thirty-Forth IAS Annual Meeting (Cat. No.99CH36370), Phoenix, AZ, USA, 3–7 October 1999; Volume 1893, pp. 1897–1902. [Google Scholar]
- Braunisch, D.; Ponick, B.; Bramerdorfer, G. Combined Analytical–Numerical Noise Calculation of Electrical Machines Considering Nonsinusoidal Mode Shapes. IEEE Trans. Magn. 2013, 49, 1407–1415. [Google Scholar] [CrossRef]
- Kim, D.-J.; Jung, J.-W.; Hong, J.P.; Kim, K.-J.; Chuljun, P. A Study on the Design Process of Noise Reduction in Induction Motors. IEEE Trans. Magn. 2012, 48, 4638–4641. [Google Scholar] [CrossRef]
- Wang, C.; Bao, X.; Xu, S.; Zhou, Y.; Xu, W.; Chen, Y. Analysis of Vibration and Noise for Different Skewed Slot Type Squirrel-Cage Induction Motor. IEEE Trans. Magn. 2017, 53, 8206006. [Google Scholar] [CrossRef]
- Besnerais, J.L.; Souron, Q. Design of quiet permanent magnet synchronous electrical motors by optimum skew angle. In Proceedings of the ICSV Conference, Athens, Greece, 10–14 July 2016. [Google Scholar]
- Lin, F.; Zuo, S.-G.; Deng, W.-Z.; Wu, S.-L. Reduction of vibration and acoustic noise in permanent magnet synchronous motor by optimizing magnetic forces. J. Sound Vib. 2018, 429, 193–205. [Google Scholar] [CrossRef]
- Wang, S.; Hong, J.; Sun, Y.; Cao, H. Effect Comparison of Zigzag Skew PM Pole and Straight Skew Slot for Vibration Mitigation of PM Brush DC Motors. IEEE Trans. Ind. Electron. 2019, 67, 4752–4761. [Google Scholar] [CrossRef]
- Dong, Q.; Liu, X.; Qi, H.; Sun, C.; Wang, Y. Analysis and evaluation of electromagnetic vibration and noise in permanent magnet synchronous motor with rotor step skewing. Sci. China Technol. Sci. 2019, 62, 839–848. [Google Scholar] [CrossRef]
- Zhou, G.; Shen, J. Rotor Notching for Electromagnetic Noise Reduction of Induction Motors. IEEE Trans. Ind. Appl. 2017, 53, 3361–3370. [Google Scholar] [CrossRef]
- Lan, H.; Chen, Q.; Zou, J.; Xu, Y.; Wang, M.; Liu, M. Influence of dummy slots on noise and vibration performance in permanent magnet synchronous machines. In Proceedings of the 2017 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Harbin, China, 7–10 August 2017; pp. 1–6. [Google Scholar]
- Lan, H.; Zou, J.; Xu, Y.; Wang, M.; Yan, L. Characterization and Reduction of Zeroth Spatial-Order Radial Force in Permanent Magnet Synchronous Machines. In IET Conference Proceedings; Institution of Engineering and Technology: Guiyang, China, 2018; pp. 72–78. [Google Scholar] [CrossRef]
- Xing, Z.; Wang, X.; Zhao, W. Research on weakening measure of radial electromagnetic force waves in permanent magnet synchronous motors by inserting auxiliary slots. IET Electr. Power Appl. 2020, 14, 1381–1395. [Google Scholar] [CrossRef]
- Khan, M.A.; Khan, F.; Rahman, L.U.; Fatima, A. Analysis and Electromagnetic Noise suppression of three-phase Squirrel Cage Induction Motor. In Proceedings of the 2018 International Conference on Computing, Electronic and Electrical Engineering (ICE Cube), Quetta, Pakistan, 12–13 November 2018; pp. 1–5. [Google Scholar]
- Ye, F.; Liu, W. Analysis and Optimization of Electromagnetic Noise of Interior Permanent Magnet Synchronous Motor for Vehicle. IOP Conf. Ser. Mater. Sci. Eng. 2020, 768, 062009. [Google Scholar] [CrossRef]
- Wang, Y.; Gao, H.; Wang, H.; Ma, W. NVH Optimization Analysis of Permanent Magnet Synchronous Motor by Rotor Slotting. Vehicles 2020, 2, 287–303. [Google Scholar] [CrossRef]
- Putri, A.; Rick, S.; Franck, D.; Hameyer, K. Application of Sinusoidal Field Pole in a Permanent-Magnet Synchronous Machine to Improve the NVH Behavior Considering the MTPA and MTPV Operation Area. IEEE Trans. Ind. Appl. 2016, 52, 2280–2288. [Google Scholar] [CrossRef]
- Le Besnerais, J.; Lanfranchi, V.; Hecquet, M.; Romary, R.; Brochet, P. Optimal Slot Opening Width for Magnetic Noise Reduction in Induction Motors. IEEE Trans. Energy Convers. 2010, 24, 869–874. [Google Scholar] [CrossRef]
- Jung, J.-W.; Lee, S.-H.; Lee, G.-H.; Hong, J.P.; Lee, D.-H.; Kim, K.-N. Reduction Design of Vibration and Noise in IPMSM Type Integrated Starter and Generator for HEV. IEEE Trans. Magn. 2010, 46, 2454–2457. [Google Scholar] [CrossRef]
- Wang, S.; Li, H. Reduction of Electromagnetic Vibration and Noise in Permanent Magnet Motor for EVs by Optimizing Design of Rotor Based on GPR-PSO Model. J. Electr. Eng. Technol. 2020, 15, 1231–1243. [Google Scholar] [CrossRef]
- Besnerais, J.L.; Souron, Q. Effect of magnetic wedges on electromagnetically-induced acoustic noise and vibrations of electrical machines. In Proceedings of the 2016 XXII International Conference on Electrical Machines (ICEM), Lausanne, Switzerland, 4–7 September 2016; pp. 2217–2222. [Google Scholar]
- Bauw, G.; Balavoine, F.; Cassoret, B.; Ninet, O.; Romary, R. Damper winding for noise and vibration reduction of PWM-fed induction machines. In Proceedings of the 2017 IEEE International Electric Machines and Drives Conference (IEMDC), Miami, FL, USA, 21–24 May 2017; pp. 1–6. [Google Scholar]
- Besnerais, J.L.; Brando, G.; Dannier, A.; Pizzo, A.D.; Noia, L.P.D.; Rizzo, R.; Castellini, L.; Andrea, M.D. Analysis of noise reduction in a low speed and high torque PMSM with tooth concentrated windings. In Proceedings of the 2016 Eleventh International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 6–8 April 2016; pp. 1–6. [Google Scholar]
- Devillers, E.; Hecquet, M.; Le Besnerais, J.; Lecointe, J.-P. Effect of the load angle on radial and tangential magnetic forces in Permanent Magnet Synchronous Machines. In Proceedings of the ISEF, 2017, Lodz, Poland, 14–16 September 2017. [Google Scholar]
- Ni, S.; Bauw, G.; Romary, R.; Cassoret, B.; Le Besnerais, J. Damper Winding for Noise and Vibration Reduction of a Permanent Magnet Synchronous Machine. Sensors 2022, 22, 2738. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.H.; Hong, J.P. A Study on the Acoustic Noise Reduction of Interior Permanent Magnet Motor with Concentrated Winding. In Proceedings of the 2008 IEEE Industry Applications Society Annual Meeting, Edmonton, AB, Canada, 5–9 October 2008; pp. 1–5. [Google Scholar]
- Deng, W.; Zuo, S. Noise Reduction of Axial-Flux Motors by Combining Various Pole-Arc Coefficients and Circumferential Shifting of Permanent Magnets: An Analytical Approach. IET Electr. Power Appl. 2019, 13, 951–957. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, Y.; Li, N. Analysis and Reduction of Electromagnetic Noise of Yokeless and Segmented Armature Axial Flux Motor. In Proceedings of the 2022 25th International Conference on Electrical Machines and Systems (ICEMS), Chiang Mai, Thailand, 29 November–2 December 2022; pp. 1–6. [Google Scholar]
- Letelier, A.; Gonzalez, D.; Tapia, J.; Wallace, R.R.; Valenzuela, M. Cogging Torque Reduction in an Axial Flux PM Machine via Stator Slot Displacement and Skewing. IEEE Trans. Ind. Appl. 2007, 43, 685–693. [Google Scholar] [CrossRef]
- Baig, M.; Ikram, J.; Iftikhar, A.; Bukhari, S.S.H.; Khan, N.; Ro, J.-S. Minimization of Cogging Torque in Axial Field Flux Switching Machine Using Arc Shaped Triangular Magnets. IEEE Access 2020, 8, 227193–227201. [Google Scholar] [CrossRef]
- Gulec, M.; Aydin, M. Magnet asymmetry in reduction of cogging torque for integer slot axial flux permanent magnet motors. IET Electr. Power Appl. 2014, 8, 189–198. [Google Scholar] [CrossRef]
- Kumar, P.; Srivastava, R. Cost-effective stator modification techniques for cogging torque reduction in axial flux permanent magnet machines. In Proceedings of the 2018 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Bangkok, Thailand, 6–9 June 2018; pp. 1–5. [Google Scholar]
- Wanjiku, J.; Khan, M.; Barendse, P.; Pillay, P. Influence of Slot-Openings and Tooth Profile on Cogging Torque in Axial-Flux PM Machines. IEEE Trans. Ind. Electron. 2015, 62, 7578–7589. [Google Scholar] [CrossRef]
- Dzhankhotov, V.; Pyrhönen, J. Passive LC Filter Design Considerations for Motor Applications. IEEE Trans. Ind. Electron. 2013, 60, 4253–4259. [Google Scholar] [CrossRef]
- Cassoret, B.; Corton, R.; Roger, D.; Brudny, J.F. Magnetic noise reduction of induction machines. IEEE Trans. Power Electron. 2003, 18, 570–579. [Google Scholar] [CrossRef]
- Girgin, M.T.; Aydin, M. Elimination of Cogging Torque for Axial Flux Permanent Magnet Motors Based on Current Harmonic Injection. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23–26 August 2020; pp. 1117–1122. [Google Scholar]
- Marignetti, F.; Rubino, G.; Boukadida, Y.; Conti, P.; Gregorio, F.D.; Iengo, E.; Longobardi, V.G. Noise and vibration analysis of an inverter-fed three-phase induction motor. In Proceedings of the 2020 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Sorrento, Italy, 24–26 June 2020; pp. 157–161. [Google Scholar]
- Le Besnerais, J.; Lanfranchi, V.; Hecquet, M.; Brochet, P. Characterization and Reduction of Audible Magnetic Noise Due to PWM Supply in Induction Machines. IEEE Trans. Ind. Electron. 2010, 57, 1288–1295. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Central Frequency [Hz] | Cutoff Frequency [Hz] |
|---|---|
| 22 | |
| 31.5 | |
| 45 | |
| 63 | |
| 88 | |
| 125 | |
| 177 | |
| 250 | |
| 354 | |
| 500 | |
| 707 | |
| 1000 | |
| 1414 | |
| 2000 | |
| 2828 | |
| 4000 | |
| 5657 | |
| 8000 | |
| 11,314 |
| Calculation Method | Reference | Test Results | Remarks |
|---|---|---|---|
| Analytical | [64] | Yes | Results comparison between 5 different calculation methods, 2 of them analytical |
| [65] | Yes | AFM natural frequency calculation | |
| [66] | Yes | Two methods: Stator density modification and addition of mass points | |
| [67] | No | Adds equivalent material properties to stator teeth and winding combination Validation with FEM | |
| [68] | Yes | End covers are taken into account | |
| FEM | [69] | Yes | Comparison between only the stator and the stator, cooling system and housing |
| [68] | Yes | Stator and winding taken into account for the FEM calculation |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gonzalez, P.; Buigues, G.; Mazon, A.J. Noise in Electric Motors: A Comprehensive Review. Energies 2023, 16, 5311. https://doi.org/10.3390/en16145311
Gonzalez P, Buigues G, Mazon AJ. Noise in Electric Motors: A Comprehensive Review. Energies. 2023; 16(14):5311. https://doi.org/10.3390/en16145311
Chicago/Turabian StyleGonzalez, Patxi, Garikoitz Buigues, and Angel Javier Mazon. 2023. "Noise in Electric Motors: A Comprehensive Review" Energies 16, no. 14: 5311. https://doi.org/10.3390/en16145311
APA StyleGonzalez, P., Buigues, G., & Mazon, A. J. (2023). Noise in Electric Motors: A Comprehensive Review. Energies, 16(14), 5311. https://doi.org/10.3390/en16145311