2.2. Alternative Algorithm Description
An Equivalent Consumption Minimization Strategy (ECMS) algorithm has been developed in the current study, as an alternative to the back-engineered RB one. Both of the algorithms—ECMS and the back-engineered one—are applied to the same vehicle simulator platform of parallel P2 PHEV that has been built in the AVL Cruise simulator platform. The ECMS algorithm aims at optimizing a predefined FC cost function for given operation conditions. The general cost function for fuel consumption optimization of a hybrid vehicle is given in Equation (1), where
is a performance index that needs to be minimized. The integral term represents the total fuel consumption over a complete driving profile, as it integrates the instantaneous FC
from an initial (
) to a terminal time stamp (
). FC depends on the normalized engine load function u that ranges between 0 (engine shut off) to 1 (operation at full power—
), according to Equation (2). The first term in Equation (1) is used as a soft constraint for the value of the SOC at the end of the cycle (
). With the use of the
function, SOC deviations from the final target value (
) are being penalized. The choice of the
value depends on the examined study. Usually, in PHEVs applications, the charge depletion is permitted because the battery can be charged from the electric power grid. As a result, for PHEVs applications, the
can be lower than the initial value of SOC [
8,
9].
The optimization of Equation (1) leads to the determination of the u for every second of the driving cycle, which in turn gives the instantaneous engine power output by means of Equation (2).
The ECMS optimization is subject to the conditions of the set of Equations (3)–(6). Equation (3) presents the power balance for the powertrain of a P2 parallel hybrid vehicle [
28]. The sum of the demanded power at wheels (
) and the mechanical power losses (
) must be equal to the mechanical power output from the main power units (electric motor power—
and engine power—
). If the vehicle velocity is known, then the
and
can be determined by a vehicle power-based model. We have set up a vehicle model in AVL Cruise for this purpose. So, with the use of Equation (3), the power output of the electric motor is determined.
Equations (4)–(6) correspond to the physical constraints of the powertrain components. Equation (4) suggests that the engine cannot overcome its full load curve, represented by the maximum engine power output (). The electric motor is also limited by its full load curve, depending on whether it works as a motor ( > 0) or generator ( < 0) (Equation (5)), with corresponding limits given by and . Finally, the battery SOC cannot exceed a range of maximum () and minimum () levels for the purpose of maintaining battery life (Equation (6)).
Optimizing Equation (1) within the set of Conditions (3)–(6) is only possible when the operation mission is known a priori. In the real-world, a priori knowledge of the driving profile application is known only over in-lab tests and not for on-road driving. For on-road operation, the ECMS will have to be locally optimized according to the present driving conditions. Such local optimization is achieved by means of Equation (7), where the integral term of Equation (1) has been eliminated. In Equation (7), the engine fuel rate
and the battery power flow expressed in terms of an equivalent fuel rate
(Equation (8)—where Q
LHV is the fuel’s lower heating value) result in an equivalent total fuel mass rate
by means of the equivalence factor
(Equation (9)). The latter comprises the constant term
and a penalization term
that depends on SOC. The
term is used as the main weighting factor of the
inside the cost function. The p penalizes deviations of the current SOC values from the target. The usage of the p term is similar to the one of the
term in Equation (1). The difference is that the penalization is made for the instantaneous values of SOC instead of the SOC value at the end of the cycle, because the optimization is only carried out locally. The battery power (
) in Equation (8) can be positive for power outflux from the battery (Equation (10a)) and negative when the EM acts as a generator that charges the battery (Equation (10b)), with
and
being the battery and electric motor efficiencies, respectively.
The algorithm basically decides on the engine operation variable u(t) in Equation (2) that leads to the lowest total equivalent fuel mass (). This procedure is repeated in every second of the complete mission profile. The algorithm takes into account two conditions regarding the potential battery charge or discharge. The first one is that a potential battery charge will lead to an SOC surplus, which can be utilized in the future. The second condition is that a present battery discharge generates a requirement for a future battery charge in order to retain the battery SOC within certain limits. An optimal solution can be guaranteed if the s term in Equation (7) is adapted appropriately (Equation (9)). In this way, although the s-by-s optimization cannot achieve as good a performance as the global optimal solution, it still produces a practical optimization solution that can be integrated in EMS without knowledge of the forthcoming driving profile.
Three alternative expressions for p have been examined in the current work (Equations (11a)–(11c)). In Type A expression, p is proportional to the difference of current SOC over a constant reference value
(Equation (12a)). Therefore, this expression tries to keep SOC at a value close to the reference one over the complete driving profile—and it is tuned by a proportional term (
). In Type B, the
value varies with travelled distance
(Equation (12b) [
29]). The algorithm also tries to keep the current SOC close to the
value, as in Type A. More specifically, in Type B, the
value starts with an initial value (
) and then the
decreases proportionally with the
until it reaches the target SOC value (
). In Type B, the total driving distance (
) must be either known or estimated. Some research articles mention that this type of linear SOC trajectory with distance seems to be close to the global optimal solution [
30,
31]. In Type C expression, a specific SOC window is used for determining p [
8] (Equation (11c)). More specifically, the
p value dependents on SOC, a target value for the SOC (
, selected maximum and minimum SOC values and a selected superscript for the penalization function (
). With this expression, SOC is retained above a certain level in order to ensure the battery physical constraints (
) proactively with the adaptation of the equivalence factor. Moreover, this expression constrains battery charging during charge sustain operation until a rational level (e.g.,
).
Attention is required in selecting the parameters for each expression to achieve feasible solutions. For example, in our effort for parameters tuning, we spotted that some parameter combinations led to extremely low SOC levels or even that the vehicle could not follow the speed profile. So, after a trial-and-error basis in order to achieve feasible solutions, the setup of the algorithm parameters is presented in
Table 3.
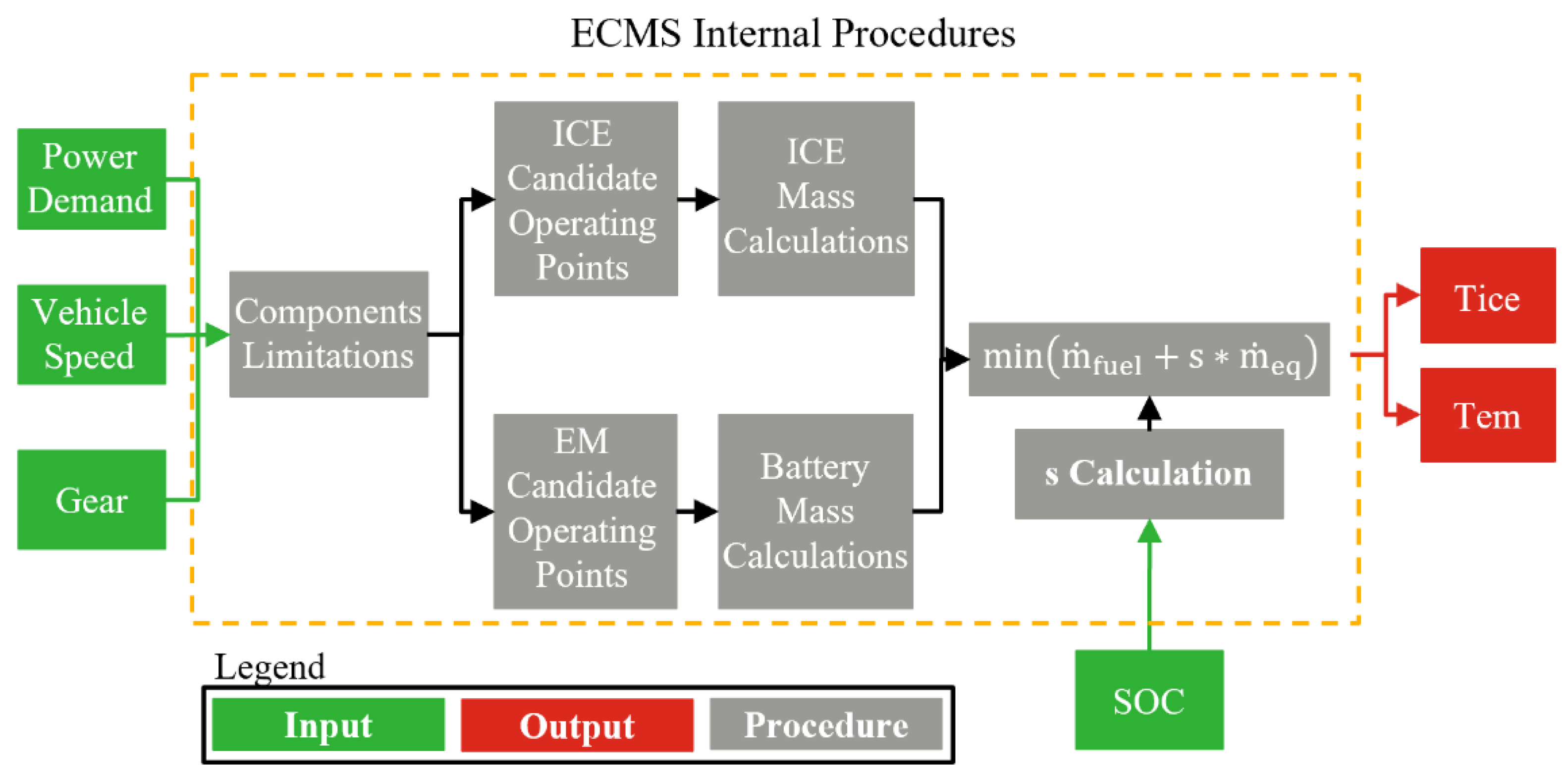
The ECMS algorithm flowchart is illustrated in
Figure 3. ECMS requires power demand, vehicle velocity, gear number and current SOC as input data. The first step is to select the numerical values for the physical limitations according Equations (4)–(6). After that, the algorithm calculates the equivalent fuel rate
for the different candidate operating points by adjusting the equivalent consumption of the electrical motor according to the SOC, as described in Equations (9) and (11a)–(12b). Finally, the algorithm selects the case with the minimum fuel mass, which is then translated into specific torque outputs of the ICE and the electric motor.
2.3. Corrections for the Assessment of Different Algorithms
The assessment of different EMS algorithms needs to be carried out on a fair basis. Each EMS algorithm leads to different decisions for engine and motor engagement (Equation (2)) that may slightly affect the speed of the vehicle due to power availability and gear change interference. The different speed profiles will, in turn, result in a slightly different demanded power profile for each algorithm. These differences could have been avoided by backward modeling, because this approach guarantees that the vehicle exactly follows the target speed. However, in our approach, the forward modeling is chosen because forward simulators are based on physical causality. With these simulators, online control strategies can be developed [
8]. Moreover, the SOC difference between trip start and end may differ between various algorithms. Nevertheless, when assessing the impacts of different algorithms on FC, one needs to make sure that the distance, demanded energy, and SOC differences are identical in the various simulations.
A method to adjust for such potential differences is, therefore, introduced. Assuming a total energy consumption over a theoretical accurate driving profile in each simulation, variations of this profile will lead to energy differences, not because of EMS performance but because of distance and SOC variations in each simulation. A corrected fuel-equivalent energy consumption (CE) can, therefore, be estimated from the simulated one (SE) by correcting for deviations in the SOC (
), propulsion energy (
) and contribution of regenerative braking (
) in Equation (13).
correction is needed to make sure that all simulations result in identical final SOC. The
term corrects for slight differences in the driving profile (speed, acceleration and distance) of the simulations of a given driving sequence. Finally,
adjusts the energy consumption when the simulated regenerative braking energy benefits are different from the ones calculated in the theoretically accurate driving profile. In that way, the energy differences due to driving profile variations at the braking phases can be corrected. The corrected energy correction of Equation (13) should be implemented in all relevant works where different optimization algorithms are being compared.
Equation (14) describes
as the fuel energy delivery that covers the difference between the simulated and reference depleted energies from the battery (
). In the denominator of Equation (14), the average product of the individual components’ efficiencies has been considered for the time moments that the battery is charged from the ICE, with
being the ICE efficiency. The calculation for the reference value of the depleted battery energy is presented in Equation (15). The value is calculated as a difference from a final SOC level, which in our case has been selected to be 14%, with
and
being the battery capacity and average battery voltage, respectively.
The
—Equation (16)—is the fuel energy that should be supplied to equalize the simulated energy demand at gearbox (
) with the one calculated from the theoretical speed profile (
). The ICE efficiency should be the average one during positive power demand at gearbox inlet (
).
—Equation (17)—is the energy demand for vehicle motion for positive tractive force at the wheels (
), with
and
being the force, theoretical vehicle speed and average transmission efficiency from gearbox inlet to vehicle wheels, respectively.
consists of a polynomial function of vehicle speed (which corresponds to road loads) and the term for vehicle acceleration (Equation (18)—
,
,
are coast down test coefficients and
is the vehicle mass).
ΔE
REG—Equation (19)—expresses the potential fuel energy that can be saved if the simulated speed profile was identical to the theoretical one (
) during decelerations. The simulated battery energy influx is calculated for the time instances that the power demand at gearbox inlet is negative. To convert the battery energy influx difference to fuel energy, the same average product of efficiencies as the one in Equation (14) has been used. The
—Equation (20)—is the potential energy of braking that can be recuperated. In this calculation, the negative energy influx from the wheels (
) is calculated based on Equation (21). In the current study, the share of the total braking energy that can be recuperated (
) is assumed to be 40% of the total braking energy, while the rest is consumed at the mechanical brakes. The losses from the gearbox inlet up to the battery have been taken into account by the average product of the EM and battery efficiencies during the time events that
is negative.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}