






Universal Virtual Synchronous Generator Based on Extended Virtual Inertia to Enhance Power and Frequency Response


Abstract
:1. Introduction
- Established a small-signal model of the VSG system that reflects the coupling between the VSG active and reactive power loops, which is more detailed than the existing studies.
- Proposed a universal VSG control strategy based on extended virtual inertia (VSG-EVI). Compared with the existing methods of VSG oscillation suppression, the proposed method addresses the issue of the reduction of frequency support capability.
- The controller parametric design process is also very much simplified with the proposed intuitive extended virtual inertia, and comprehensive design constraints and a design flow considering both GC and SA modes are introduced.
- The proposed method is thoroughly validated by experiments, showing a significant improvement of the VSG power oscillation suppression in GC mode and the frequency stability in SA mode.
2. Small Signal Model of VSG
2.1. Accurate Small Signal Model of CVSG
2.2. GC Mode
2.3. SA Mode
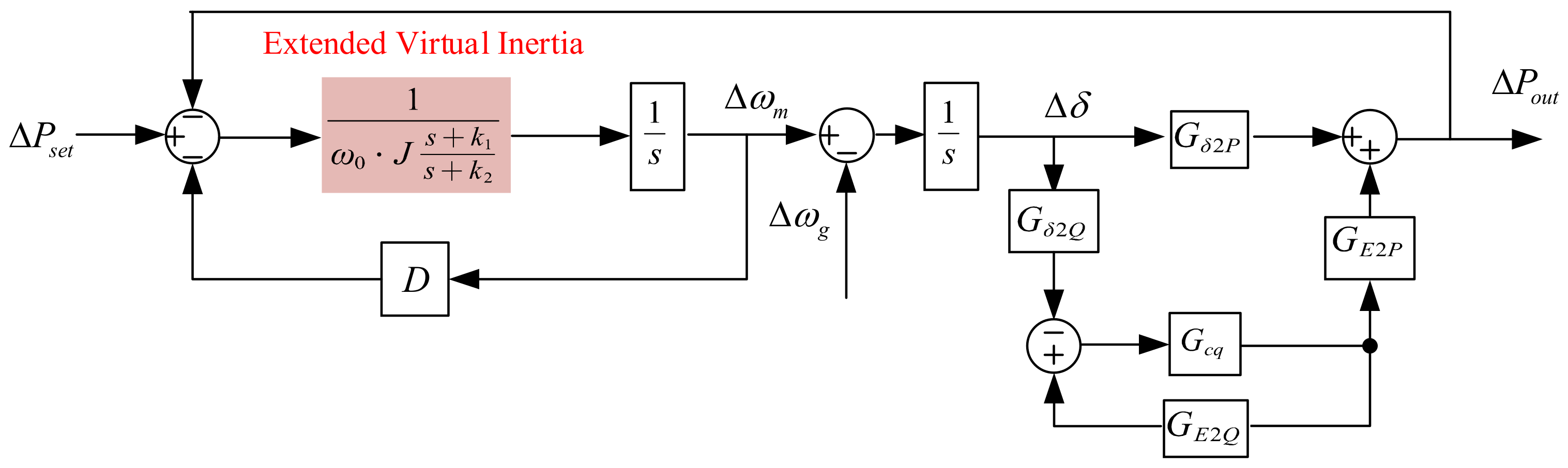
3. VSG-EVI Control Strategy
3.1. GC Mode
3.2. SA Mode
4. Parameter Design
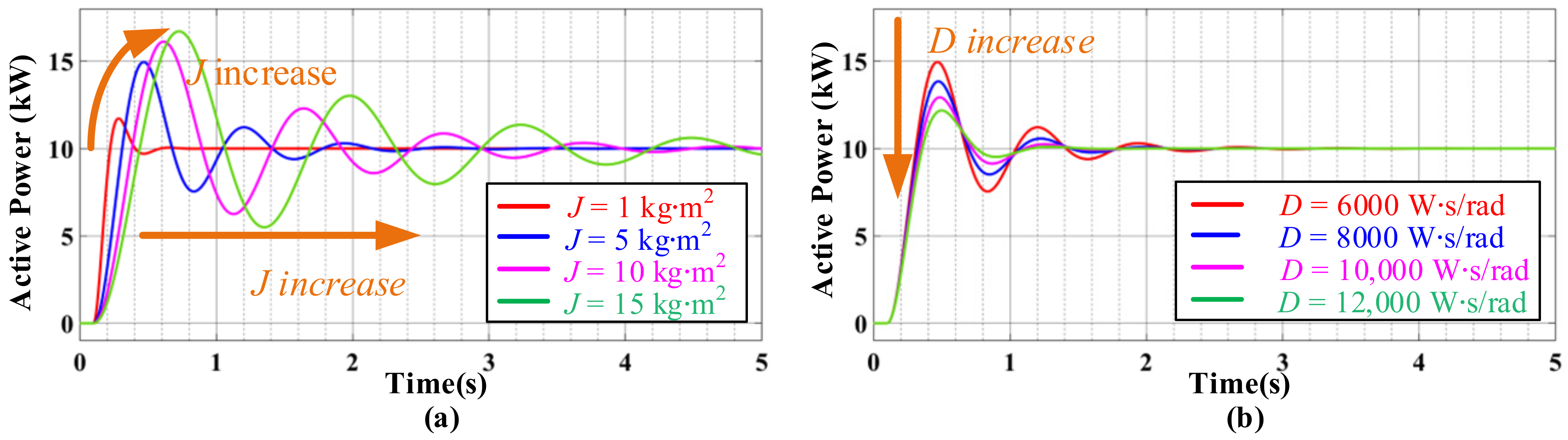
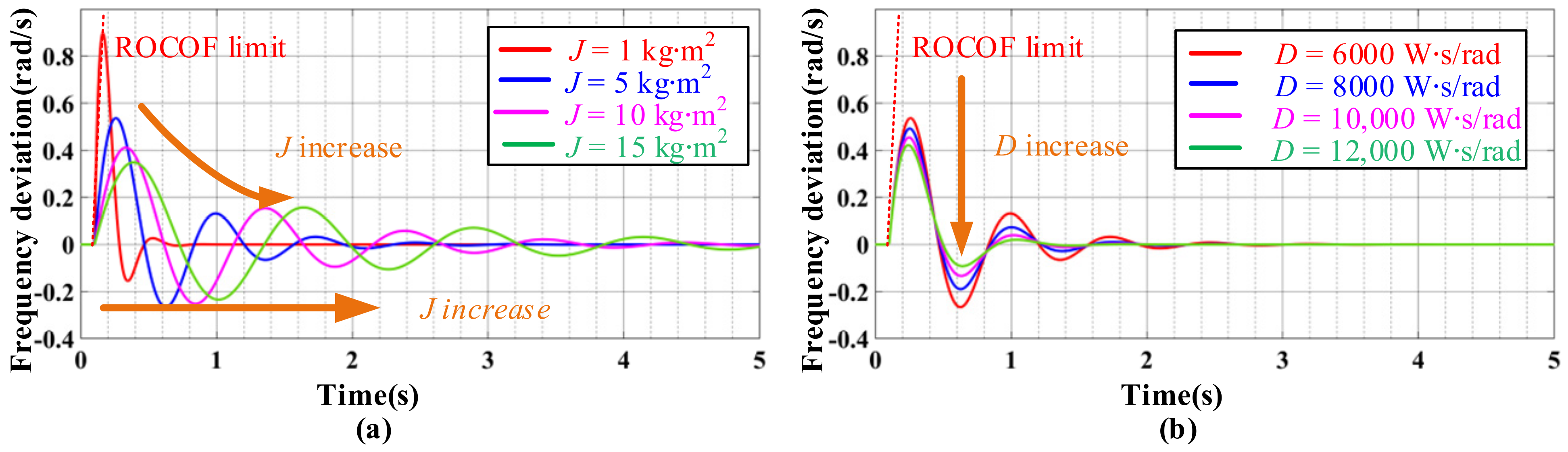
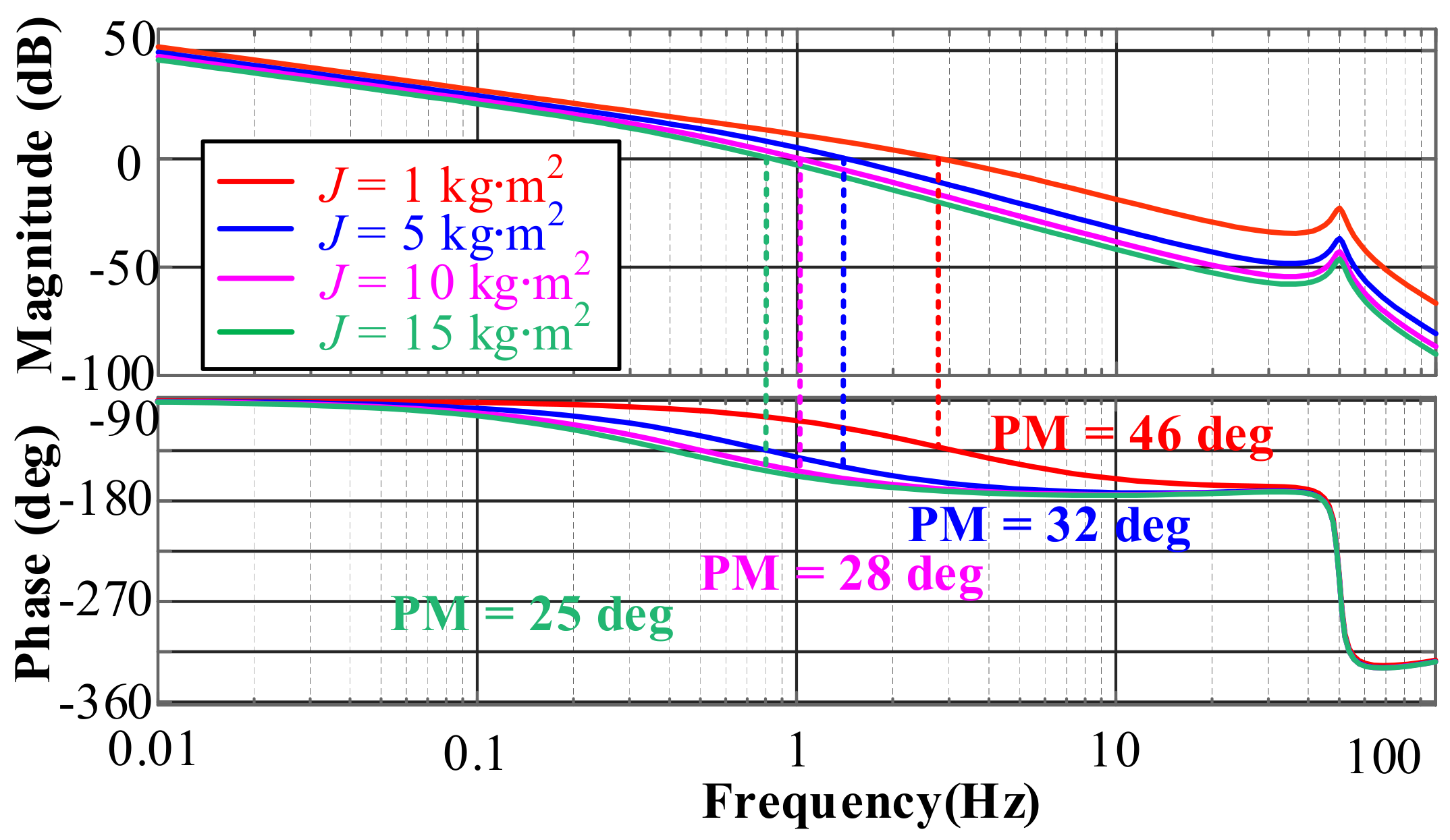
4.1. Constraints for J and D
4.2. Design of EVI Parameters
4.3. Parameter Design Flow
5. Experimental Verifications
5.1. SA Mode
5.2. GC Mode
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| J | Virtual inertia |
| D | Droop coefficient of active power control |
| Dq | Droop coefficient of reactive power control |
| K | Virtual excitation regulation coefficient |
| Pset, Qset | Command of power |
| Pout, Qout | Output power |
| ωm, ωref | Output frequency and reference frequency |
| Uout, Uref | Amplitude of voltage and reference voltage |
| Lg | The total equivalent line inductance |
| Rg | The total equivalent line resistance |
| Xg | The total equivalent line reactance |
| Δx | Small signal of x |
| Gδ2P, GE2P, GU2P | Transfer function of active power |
| Gδ2Q, GE2Q, GU2Q | Transfer function of reactive power |
| Gcp, Gcp1, Gcq | Controller |
| Gop, Gop1 | Loop gain of active power control |
| k1, k2 | Parameter of VSG-EVI |
| ωc | Cut-off frequency |
References
- Mansouri, S.A.; Ahmarinejad, A.; Sheidaei, F.; Javadi, M.S.; Rezaee Jordehi, A.; Esmaeel Nezhad, A.; Catalão, J.P.S. A Multi-Stage Joint Planning and Operation Model for Energy Hubs Considering Integrated Demand Response Programs. Int. J. Electr. Power Energy Syst. 2022, 140, 108103. [Google Scholar] [CrossRef]
- Mansouri, S.A.; Rezaee Jordehi, A.; Marzband, M.; Tostado-Véliz, M.; Jurado, F.; Aguado, J.A. An IoT-Enabled Hierarchical Decentralized Framework for Multi-Energy Microgrids Market Management in the Presence of Smart Prosumers Using a Deep Learning-Based Forecaster. Appl. Energy 2023, 333, 120560. [Google Scholar] [CrossRef]
- Mansouri, S.; Ahmarinejad, A.; Javadi, M.; Esmaeel Nezhad, A.; Shafie-khah, M.; Catalão, J. Demand Response Role for Enhancing the Flexibility of Local Energy Systems. In Distributed Energy Resources in Local Integrated Energy Systems; Elsevier: Amsterdam, The Netherlands, 2021; pp. 279–313. ISBN 978-0-12-823899-8. [Google Scholar]
- Mansouri, S.A.; Ahmarinejad, A.; Nematbakhsh, E.; Javadi, M.S.; Jordehi, A.R.; Catalao, J.P.S. Energy Hub Design in the Presence of P2G System Considering the Variable Efficiencies of Gas-Fired Converters. In Proceedings of the 2021 International Conference on Smart Energy Systems and Technologies (SEST), Vaasa, Finland, 6–8 September 2021; pp. 1–6. [Google Scholar]
- Hosseini, S.E.; Ahmarinejad, A.; Tabrizian, M.; Bidgoli, M.A. Resilience Enhancement of Integrated Electricity-Gas-Heating Networks through Automatic Switching in the Presence of Energy Storage Systems. J. Energy Storage 2022, 47, 103662. [Google Scholar] [CrossRef]
- Barik, A.K.; Das, D.C. Integrated Resource Planning in Sustainable Energy-Based Distributed Microgrids. Sustain. Energy Technol. Assess. 2021, 48, 101622. [Google Scholar] [CrossRef]
- Bhuyan, M.; Das, D.C.; Barik, A.K. Proficient Power Control Strategy for Combined Solar Gas Turbine-wind Turbine Generator-biodiesel Generator Based Two Area Interconnected Microgrid Employed with DC Link Using Harris’s Hawk Optimization Optimised Tilt-integral-derivative Controller. Int. J. Numer. Model. 2022, 35, e2991. [Google Scholar] [CrossRef]
- Barakat, M.; Donkol, A.; Hamed, H.F.A.; Salama, G.M. Harris Hawks-Based Optimization Algorithm for Automatic LFC of the Interconnected Power System Using PD-PI Cascade Control. J. Electr. Eng. Technol. 2021, 16, 1845–1865. [Google Scholar] [CrossRef]
- Barik, A.K.; Das, D.C.; Latif, A.; Hussain, S.M.S.; Ustun, T.S. Optimal Voltage–Frequency Regulation in Distributed Sustainable Energy-Based Hybrid Microgrids with Integrated Resource Planning. Energies 2021, 14, 2735. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; de Vicuna, L.G.; Castilla, M. Hierarchical Control of Droop-Controlled AC and DC Microgrids—A General Approach Toward Standardization. IEEE Trans. Ind. Electron. 2011, 58, 158–172. [Google Scholar] [CrossRef]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodríguez, P. Control of Power Converters in AC Microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, B.; Wang, J.; Kim, J. Decentralized Energy Management System for Networked Microgrids in Grid-Connected and Islanded Modes. IEEE Trans. Smart Grid 2016, 7, 1097–1105. [Google Scholar] [CrossRef]
- Ratnam, K.S.; Palanisamy, K.; Yang, G. Future Low-Inertia Power Systems: Requirements, Issues, and Solutions—A Review. Renew. Sustain. Energy Rev. 2020, 124, 109773. [Google Scholar] [CrossRef]
- Fang, J.; Li, H.; Tang, Y.; Blaabjerg, F. On the Inertia of Future More-Electronics Power Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 2130–2146. [Google Scholar] [CrossRef]
- Shazon, M.N.H.; Nahid-Al-Masood; Ahmed, H.M.; Deeba, S.R.; Hossain, E. Exploring the Utilization of Energy Storage Systems for Frequency Response Adequacy of a Low Inertia Power Grid. IEEE Access 2021, 9, 129933–129950. [Google Scholar] [CrossRef]
- Abuagreb, M.; Allehyani, M.F.; Johnson, B.K. Overview of Virtual Synchronous Generators: Existing Projects, Challenges, and Future Trends. Electronics 2022, 11, 2843. [Google Scholar] [CrossRef]
- Vorwerk, J.; Markovic, U.; Hug, G. Comparing the Damping Capabilities of Different Fast-Frequency Controlled Demand Technologies. In Proceedings of the 2021 IEEE Madrid PowerTech, Madrid, Spain, 28 June–2 July 2021; pp. 1–6. [Google Scholar]
- Shin, H.; Hur, J. Optimal Energy Storage Sizing with Battery Augmentation for Renewable-Plus-Storage Power Plants. IEEE Access 2020, 8, 187730–187743. [Google Scholar] [CrossRef]
- Allehyani, M.F.; Abuagreb, M.; Johnson, B.K. The Effect of Frequency Droop Damping on System Parameters and Battery Sizing During Load Change Condition. In Proceedings of the 2022 International Conference on Electrical, Computer and Energy Technologies (ICECET), Prague, Czech Republic, 20–22 July 2022; pp. 1–5. [Google Scholar]
- Abuagreb, M.; Ajao, B.; Herbert, H.; Johnson, B.K. Evaluation of Virtual Synchronous Generator Compared to Synchronous Generator. In Proceedings of the 2020 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 17–20 February 2020; pp. 1–5. [Google Scholar]
- Driesen, J.; Visscher, K. Virtual Synchronous Generators. In Proceedings of the 2008 IEEE Power and Energy Society General Meeting—Conversion and Delivery of Electrical Energy in the 21st Century, Pittsburgh, PA, USA, 20–24 July 2008; pp. 1–3. [Google Scholar]
- Duan, Q.; Zhao, C. Improved VSG Controlled SST in a Low-Voltage AC Distribution Network. In Proceedings of the 2021 IEEE Sustainable Power and Energy Conference (iSPEC), Nanjing, China, 23–25 December 2021; pp. 428–435. [Google Scholar]
- Wu, H.; Ruan, X.; Yang, D.; Chen, X.; Zhao, W.; Lv, Z.; Zhong, Q. Small-Signal Modeling and Parameters Design for Virtual Synchronous Generators. IEEE Trans. Ind. Electron. 2016, 63, 4292–4303. [Google Scholar] [CrossRef]
- Mercier, P.; Cherkaoui, R.; Oudalov, A. Optimizing a Battery Energy Storage System for Frequency Control Application in an Isolated Power System. IEEE Trans. Power Syst. 2009, 24, 1469–1477. [Google Scholar] [CrossRef]
- Zhang, Y.J.A.; Zhao, C.; Tang, W.; Low, S.H. Profit-Maximizing Planning and Control of Battery Energy Storage Systems for Primary Frequency Control. IEEE Trans. Smart Grid 2018, 9, 712–723. [Google Scholar] [CrossRef] [Green Version]
- Shang, L.; Dong, X.; Liu, C.; Gong, Z. Fast Grid Frequency and Voltage Control of Battery Energy Storage System Based on the Amplitude-Phase-Locked-Loop. IEEE Trans. Smart Grid 2022, 13, 941–953. [Google Scholar] [CrossRef]
- Alipoor, J.; Miura, Y.; Ise, T. Stability Assessment and Optimization Methods for Microgrid with Multiple VSG Units. IEEE Trans. Smart Grid 2018, 9, 1462–1471. [Google Scholar] [CrossRef]
- Hou, X.; Han, H.; Zhong, C.; Yuan, W.; Yi, M.; Chen, Y. Improvement of Transient Stability in Inverter-Based AC Microgrid via Adaptive Virtual Inertia. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–6. [Google Scholar]
- Qu, S.; Wang, Z. Cooperative Control Strategy of Virtual Synchronous Generator Based on Optimal Damping Ratio. IEEE Access 2021, 9, 709–719. [Google Scholar] [CrossRef]
- Li, J.; Wen, B.; Wang, H. Adaptive Virtual Inertia Control Strategy of VSG for Micro-Grid Based on Improved Bang-Bang Control Strategy. IEEE Access 2019, 7, 39509–39514. [Google Scholar] [CrossRef]
- Ren, M.; Li, T.; Shi, K.; Xu, P.; Sun, Y. Coordinated Control Strategy of Virtual Synchronous Generator Based on Adaptive Moment of Inertia and Virtual Impedance. IEEE J. Emerg. Sel. Top. Circuits Syst. 2021, 11, 99–110. [Google Scholar] [CrossRef]
- Yang, Y.; Xu, J.; Li, C.; Zhang, W.; Wu, Q.; Wen, M.; Blaabjerg, F. A New Virtual Inductance Control Method for Frequency Stabilization of Grid-Forming Virtual Synchronous Generators. IEEE Trans. Ind. Electron. 2023, 70, 441–451. [Google Scholar] [CrossRef]
- Meng, X.; Liu, J.; Liu, Z. A Generalized Droop Control for Grid-Supporting Inverter Based on Comparison between Traditional Droop Control and Virtual Synchronous Generator Control. IEEE Trans. Power Electron. 2019, 34, 5416–5438. [Google Scholar] [CrossRef]
- Li, M.; Yu, P.; Hu, W.; Wang, Y.; Shu, S.; Zhang, Z.; Blaabjerg, F. Phase Feedforward Damping Control Method for Virtual Synchronous Generators. IEEE Trans. Power Electron. 2022, 37, 9790–9806. [Google Scholar] [CrossRef]
- Gao, C.; Liu, X.; Chen, H. Research on the Control Strategy of Distributed Energy Resources Inverter Based on Improved Virtual Synchronous Generator. Sci. Rep. 2017, 7, 9025. [Google Scholar] [CrossRef] [PubMed] [Green Version]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Vg | 220 V | C | 30 uF |
| Vdc | 700 V | L2 | 1500 uH |
| f0 | 50 Hz | D | 6000 |
| S* | 10 kVA | J | 5.5 |
| fsw | 20 kHz | k1 | 10 |
| L1 | 400 uH | k2 | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Yang, B.; Xu, S.; Du, M.; Lu, S. Universal Virtual Synchronous Generator Based on Extended Virtual Inertia to Enhance Power and Frequency Response. Energies 2023, 16, 2983. https://doi.org/10.3390/en16072983
Liu H, Yang B, Xu S, Du M, Lu S. Universal Virtual Synchronous Generator Based on Extended Virtual Inertia to Enhance Power and Frequency Response. Energies. 2023; 16(7):2983. https://doi.org/10.3390/en16072983
Chicago/Turabian StyleLiu, Hao, Bo Yang, Song Xu, Mingjian Du, and Shuai Lu. 2023. "Universal Virtual Synchronous Generator Based on Extended Virtual Inertia to Enhance Power and Frequency Response" Energies 16, no. 7: 2983. https://doi.org/10.3390/en16072983
APA StyleLiu, H., Yang, B., Xu, S., Du, M., & Lu, S. (2023). Universal Virtual Synchronous Generator Based on Extended Virtual Inertia to Enhance Power and Frequency Response. Energies, 16(7), 2983. https://doi.org/10.3390/en16072983