1. Introduction
In recent years, more electric aircraft (MEA) have become the research trend of modern aircraft due to their higher energy efficiency, reduced maintenance costs, and lower carbon dioxide emissions [
1,
2,
3]. Meanwhile, with the development of aircraft electrification, new electrical loads on aircraft will put forward higher requirements on power capacity, power quality, and power supply reliability of the electric power system (EPS) in MEA [
4,
5]. In order to meet the new requirements, many studies have been carried out on the architecture of the EPS in MEA [
6,
7,
8,
9], among which the ±270 V high voltage direct current (HVDC) power system is considered as a promising scheme and has attracted the interest of several research groups [
10,
11,
12]. Compared to the traditional 115 V AC power system on aircraft, the ±270 V HVDC power system has the advantages of lower total weight, larger power capacity, higher reliability, and easier parallel operation of multiple sources [
13,
14].
In the ±270 V HVDC power system of MEA, the AC generator power is converted and transmitted to the common HVDC bus via bipolar-output rectifiers, and then the onboard electrical loads are powered by the HVDC bus directly or through power converters [
7]. As can be seen, the bipolar-output rectifiers play an important role and are the key to establishing the bipolar HVDC power system for MEA. Meanwhile, in order to improve the adaptability of the EPS to unbalanced load conditions, the bipolar-output rectifier should be able to regulate the bipolar DC voltages actively and maintain the voltage balance between the bipolar DC ports. A general topology of bipolar-output active rectifier is constructed by two pulse width modulation (PWM) rectifiers connected in series at the DC port, but it requires a transformer with two secondary windings to withstand the DC offset voltage caused by the series connection [
15], which results in a significant increase in the weight of the rectifier. To solve this problem, an alternative approach is to add a voltage balancer to the output of a PWM rectifier. This topology requires only one PWM rectifier and can generate the bipolar DC outputs through the voltage balancer [
16]. However, the voltage balancer cannot increase the power rating of the converter, and it still needs extra power switches and auxiliary systems, which will lead to the increase in power loss, cost, and complexity of the converter [
17].
In order to establish the bipolar DC power system with a simplified converter topology, a three-phase coupled inductor-based bipolar-output active rectifier (TCIBAR) has been proposed and researched in [
18,
19]. The topology of TCIBAR can be simply constructed by adding a three-phase coupled inductor (TCI) to the conventional PWM rectifier, and the TCI is connected between the neutral points of the three-phase bridges and the neutral point of the DC-side split capacitors [
18]. Compared to the conventional PWM rectifier, the TCI can provide a new current-injection path to the neutral point of the split capacitors. Thus, by controlling the zero-sequence current in TCI, the current injected into the DC-side neutral point can be regulated. On this basis, the TCIBAR can actively adjust the DC-side neutral-point potential and realize the voltage balance control of the bipolar DC ports under different load conditions [
19]. In addition, compared with the two conventional bipolar-output active rectifiers mentioned above, TCIBAR has the advantages of fewer power switches, less complexity, and higher reliability [
18]. However, it needs to achieve the same target function with a simpler topology, which will inevitably put forward higher requirements for its control strategy. Therefore, an appropriate and effective control strategy is the key to the reliable operation of the TCIBAR.
For the PWM rectifier with unipolar DC output, the control strategies can generally be categorized into voltage-oriented control (VOC) and direct power control (DPC) [
20,
21]. In VOC, the three-phase AC currents are transformed into
d-axis and
q-axis DC components in the synchronous rotating reference frame, and PI controllers are usually employed to regulate the
dq-axes currents and calculate the voltage reference [
22]. Then, the obtained voltage reference can be modulated by space vector modulation (SVM). VOC shows good steady-state performance, but its dynamic behavior is highly dependent on the performance of the inner current loop and phase-locked loop [
22,
23]. In contrast to VOC, DPC directly takes the instantaneous active and reactive power of the converter as the control variables, and it selects the appropriate voltage vector to control the instantaneous power based on the pre-established switching table and the grid voltage angular position [
24,
25,
26]. As can be seen, DPC eliminates the inner current loop, phase-locked loop, and PWM generation module [
27]. Meanwhile, it can achieve fast dynamic response of the rectifier with simple control architecture [
27,
28,
29].
Obviously, applying DPC to the TCIBAR can share the advantages of DPC strategy and TCIBAR topology, and it can build a promising and competitive solution for the bipolar-output rectification in MEA. However, the research on DPC for bipolar-output active rectifiers is rare, and there is no DPC strategy applicable to the TCIBAR at present. Therefore, it is necessary and meaningful to explore a feasible DPC strategy for the TCIBAR.
In order to introduce the idea of DPC into the TCIBAR, the mathematical model of the TCIBAR is deduced and the basic principle of the classic DPC strategy is reviewed. However, the classic DPC strategy does not consider the influence of the zero-sequence voltage (ZSV) components in voltage vectors on the converter, which will lead to an uncontrollable zero-sequence current in TCI. Moreover, the classic DPC strategy does not involve the neutral-point potential control of the bipolar-output active rectifier, so it cannot maintain the voltage balance between bipolar DC ports, especially in the case of unbalanced port loads. Therefore, the reliable operation of TCIBAR cannot be guaranteed if the classic DPC strategy is directly applied to the TCIBAR. To overcome these shortcomings, a virtual vector-based direct power control (VVB-DPC) strategy is proposed for the TCIBAR in this paper, and the control architecture based on DPC is constructed for the TCIBAR for the first time.
The main innovations of the proposed VVB-DPC strategy are summarized as follows. First, a set of virtual vectors, which contain the same ZSV component, are derived based on the vector synthesis of adjacent non-zero voltage vectors. Second, by analyzing the effect of the virtual vectors on the power variation of TCIBAR, a virtual-vector switching table is established for the TCIBAR. Based on the virtual-vector switching table, the VVB-DPC strategy can realize the hysteresis power control of TCIBAR without causing the runaway of the zero-sequence current in TCI. Finally, in order to maintain the voltage balance between the bipolar DC ports of TCIBAR, a neutral-point potential control method based on DPC architecture is designed and integrated into the proposed VVB-DPC strategy. By inserting an appropriate zero vector with a certain duration in one control period, the proposed neutral-point potential control method can accurately generate the required ZSV without voltage modulation module and realize the regulation of the DC-side neutral-point potential of TCIBAR.
The rest of this paper is organized as follows.
Section 2 deduces the mathematical model of the TCIBAR, and the limitations of the classic DPC strategy in TCIBAR control are analyzed in
Section 3. In
Section 4, the proposed VVB-DPC strategy for TCIBAR is introduced in detail.
Section 5 presents the simulation results of the proposed VVB-DPC strategy. Experimental research is carried out to verify the feasibility and effectiveness of the proposed VVB-DPC strategy in
Section 6. Finally, the conclusions are drawn in
Section 7.
2. Mathematical Model of TCIBAR
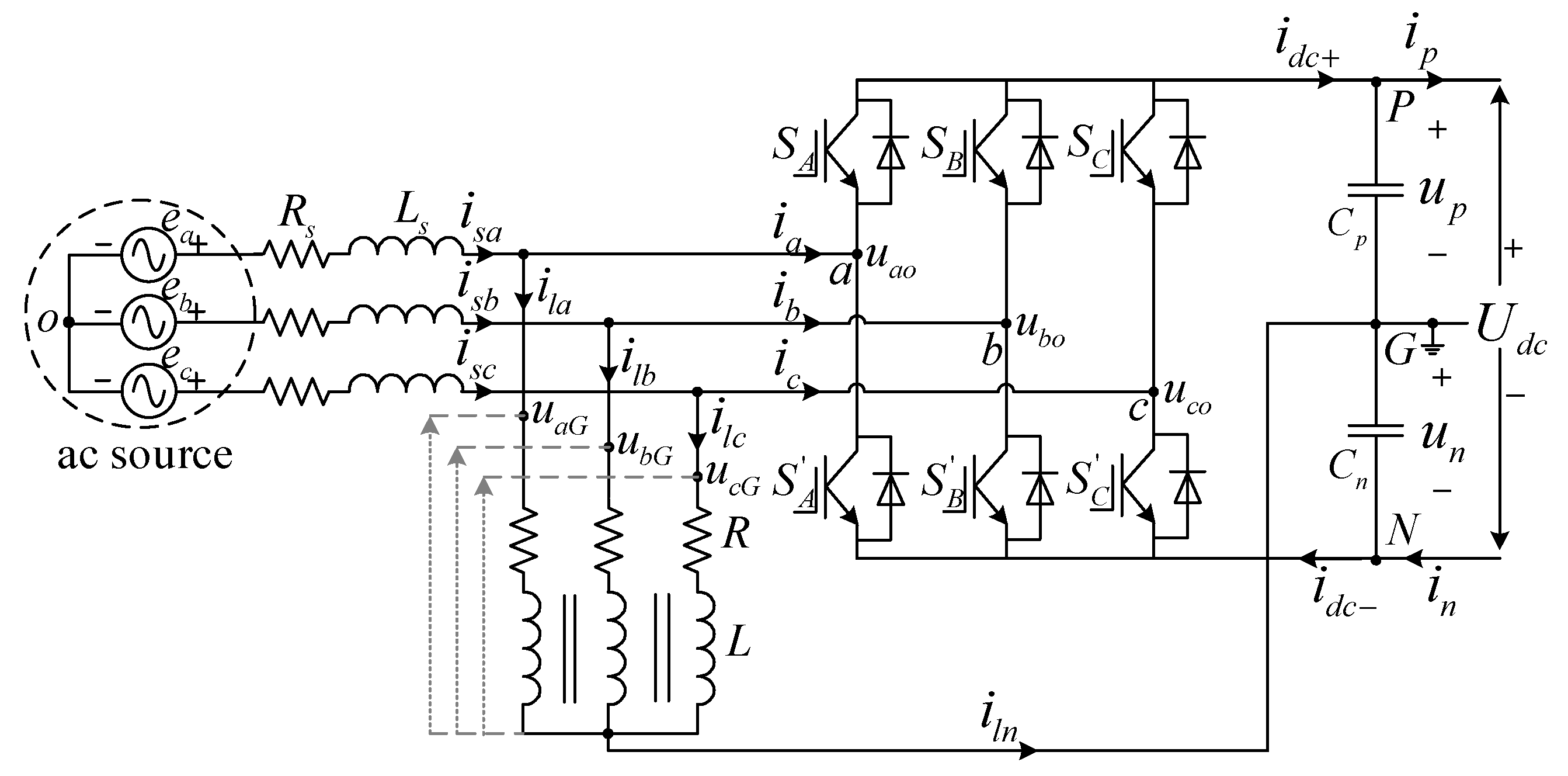
The main circuit topology of TCIBAR is depicted in
Figure 1. As can be seen, the TCIBAR consists of a two-level voltage source converter (VSC) and a symmetrical TCI. Meanwhile, it contains two branches in the topology, which are defined as AC-source branch and TCI branch in this paper. In
Figure 1,
SA~
SC and
~
are the upper and lower switches of the VSC, respectively, and
Rs and
R are the winding resistance of the filter inductor and the TCI. In addition, a three-phase AC source is used as the power supply instead of a generator.
In order to realize the effective and comprehensive control of TCIBAR, both the AC-source branch and the TCI branch need to be modeled and analyzed. Meanwhile, since the TCI provides a zero-sequence current path for the converter, the zero-sequence components in the circuit should be taken into account when establishing the mathematical model.
According to the reference directions of the voltages and currents in
Figure 1, the voltage equations of the AC-source branch can be written as follows:
where
ea,
eb, and
ec are the three-phase voltages of the AC source,
uao,
ubo, and
uco are the three-phase output voltages of the VSC, and
isa,
isb, and
isc are the three-phase input currents of the TCIBAR.
By applying the Park transformation, the voltage equations in Equation (1) can be transformed into the
dq0 coordinate system and expressed as
where
ω is the angular frequency of the AC source and the zero-sequence equation can be removed since
is0 = 0.
Meanwhile, based on the instantaneous power theory, the instantaneous active and reactive power of the TCIBAR can be expressed as Equation (3) in the
dq coordinate system,
where
p and
q are the active and reactive power of the TCIBAR, respectively.
In order to simplify the model and facilitate the subsequent analysis, the
dq coordinate system is oriented by the AC-source voltage vector, and thus the
q-axis component of the AC-source voltage is equal to zero, that is,
eq = 0. Then, by differentiating both sides of Equation (3), the active and reactive power variation rate of the TCIBAR can be written as
Regarding the AC source as an ideal voltage source, the
d-axis voltage
ed is a constant value, that is,
ded/
dt = 0. Substituting Equation (2) into Equation (4), the power model of the TCIBAR in the
dq coordinate system can be deduced as
Next, in order to realize the voltage balance control of the bipolar DC ports in TCIBAR, the voltage equations of the TCI branch are derived as
where
uaG,
ubG, and
ucG are the three-phase voltages across the TCI, and
LTCI and
RTCI are the inductance matrix and winding resistance matrix of the TCI, respectively.
As analyzed in [
19], the zero-sequence current in TCI can be controlled to maintain the voltage balance between the bipolar DC ports of TCIBAR. Meanwhile, a large zero-sequence current will flow through the TCI when the loads at the bipolar DC ports are seriously unbalanced. In order to reduce the probability of core saturation caused by the zero-sequence current, a balanced three-phase magnetic core, which cannot carry zero-sequence DC flux [
18], is applied to the TCI, and the corresponding inductance matrix and winding resistance matrix of the TCI are shown in Equation (7):
where
L and
M are the self-inductance and mutual inductance of the TCI.
By substituting Equation (7) into Equation (6) and applying the Park transformation, the voltage equations of the TCI branch in
dq0 coordinate system can be derived as
It can be seen from Equation (8) that the TCI with a balanced three-phase magnetic core has large dq-axes inductances and a small zero-sequence inductance. The large dq-axes inductances bring the advantages of reduced dq-axes currents and lower power loss, and the small zero-sequence inductance is conductive to the fast response of the zero-sequence current in TCI. Besides, according to the zero-sequence equation in Equation (8), it can be concluded that the zero-sequence current in TCI directly depends on the ZSV across the TCI. Therefore, the accurate control of the ZSV is the key to the effective regulation of the DC-side neutral-point potential of TCIBAR.
3. Limitations of Classic DPC in TCIBAR Control
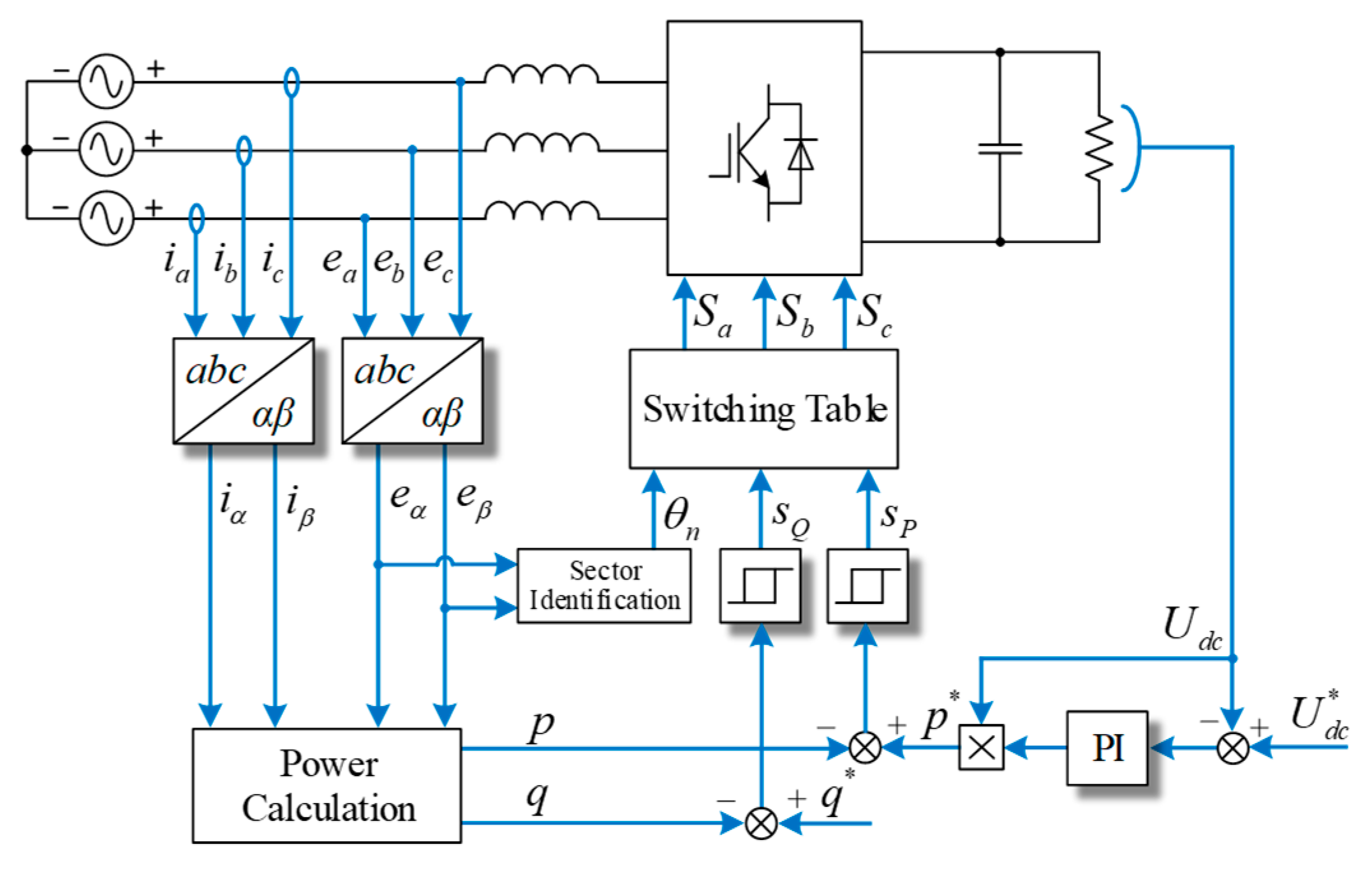
In order to introduce the control architecture of DPC into the TCIBAR, the basic principle of the classic DPC strategy is reviewed first. The classic DPC strategy has been widely used in the control of three-phase PWM rectifiers, and its control diagram is represented in
Figure 2.
In the classic DPC strategy, the hysteresis power control is employed to realize the regulation of the DC-side bus voltage and the AC-side power factor of three-phase PWM rectifiers [
28]. It can be seen from
Figure 2 that the classic DPC strategy consists of five main parts, which are switching table, sector identification, power calculation, hysteresis power control, and DC bus voltage control. First, the instantaneous active and reactive power of the rectifier can be calculated based on the instantaneous power theory. In the meantime, the reference value of active power
p* is obtained by the closed-loop control of DC bus voltage, and the reactive power reference
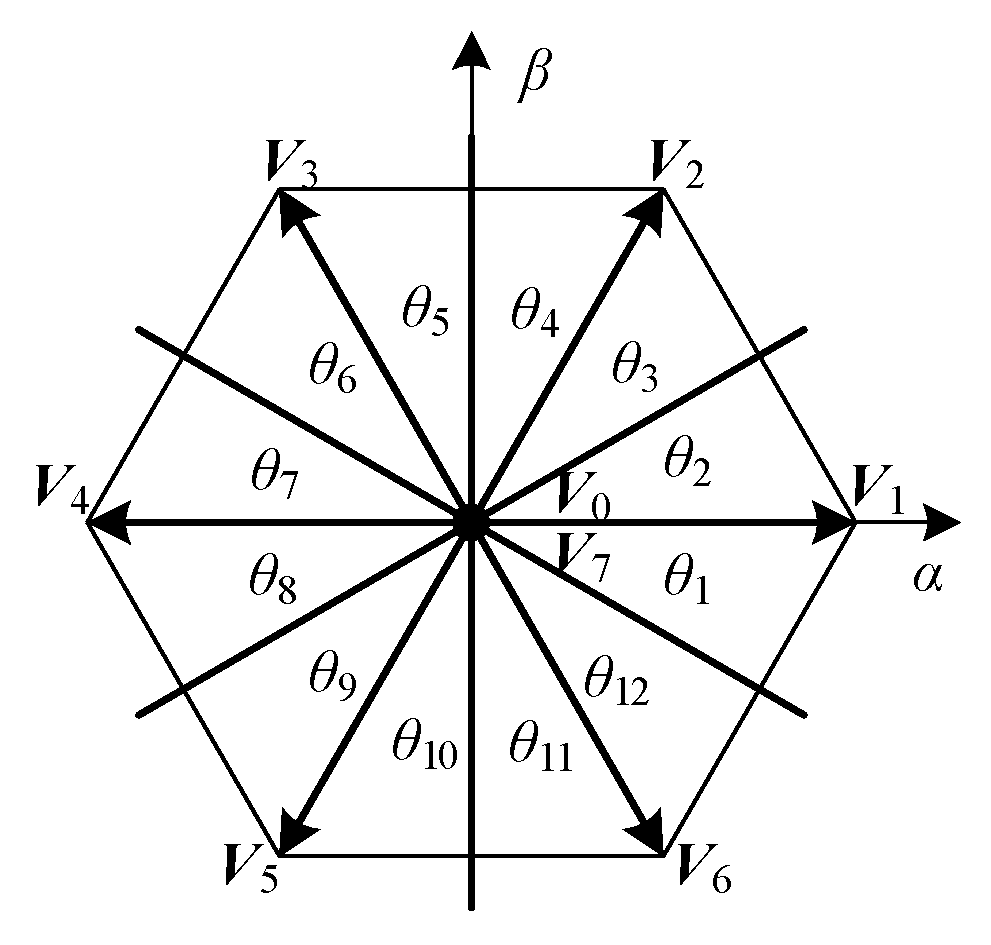
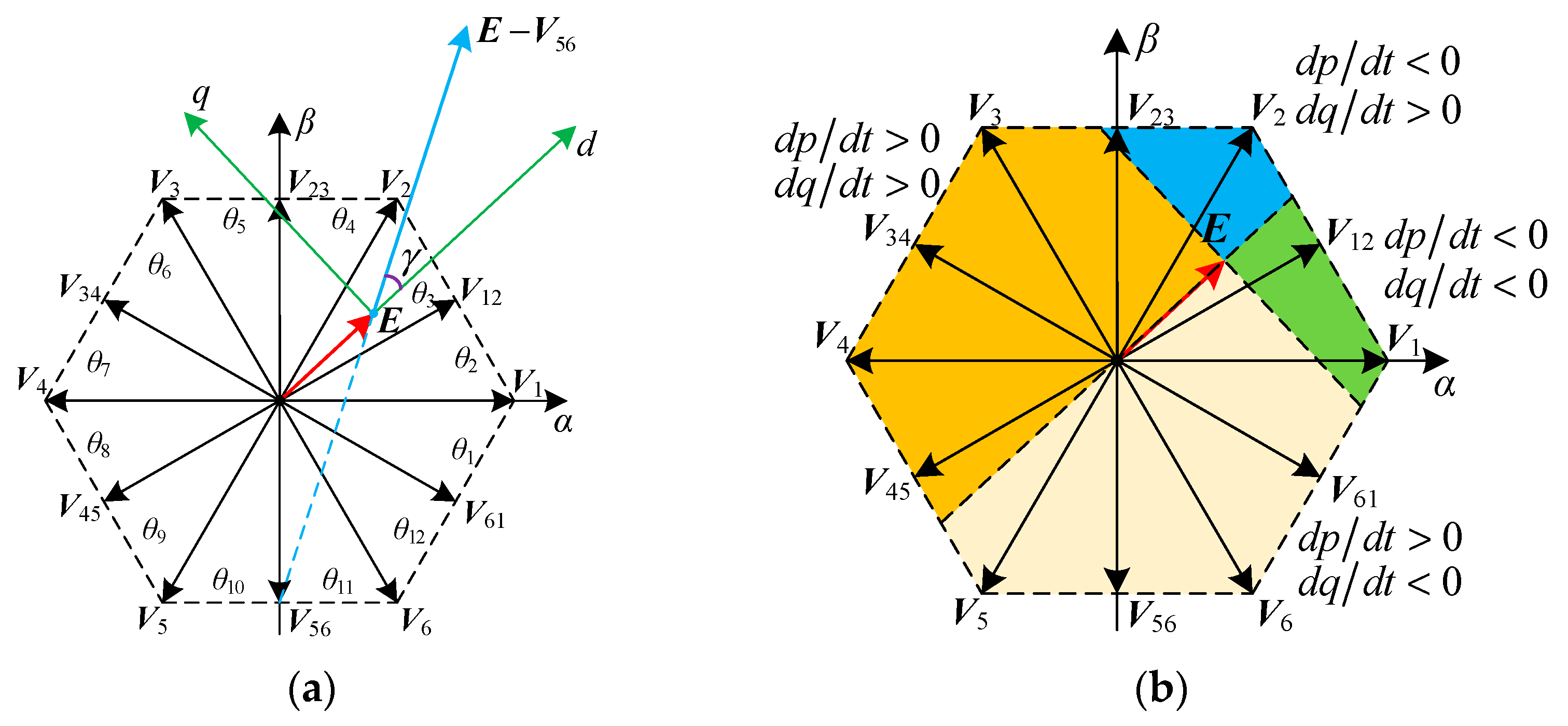
q* is usually set as zero to achieve the unit power factor of the converter. According to the instantaneous power errors, the outputs of the power hysteresis comparators are determined. Then, in order to identify the angular position of the AC-source voltage vector, the vector space is evenly divided into twelve sectors, as shown in
Figure 3, and the sector boundaries are defined as
where
θn is the sector number.
By calculating the phase angle of the AC-source voltage vector, the corresponding sector number can be determined. Finally, according to the outputs of the hysteresis comparators and the sector number, the desired voltage vector can be selected from the pre-defined switching table, which is established based on the effect of the basic voltage vectors (
V0~
V7) on the active and reactive power of the rectifier. The switching table of the classic DPC strategy is shown in
Table 1, where
sP and
sQ are the outputs of the active and reactive hysteresis comparators, respectively. In [
30,
31,
32], several new switching tables have been proposed for PWM rectifiers based on different optimization objectives, and it can be seen that the switching table affects the performance of the DPC strategy directly and is the key to the DPC strategy.
However, based on the observation of the above control diagram and switching table, it can be found that the classic DPC strategy has two limitations in the control of TCIBAR. First, since there is no zero-sequence current in the general three-phase PWM rectifiers, the classic DPC strategy does not need to consider the influence of different ZSV components in the basic voltage vectors on the rectifier. If classic DPC strategy is directly applied to the TCIBAR, it will inevitably result in an uncontrollable zero-sequence current in TCI, which will further cause the loss of control of the DC-side neutral-point potential and even lead to the oscillation and instability of the converter. Second, for the TCIBAR with bipolar DC outputs, it not only needs to ensure the stability of the total DC bus voltage, but also needs to regulate the neutral-point potential of the bipolar DC ports and maintain the voltage balance under unbalanced load conditions, which is not taken into account in the classic DPC strategy. Therefore, the classic DPC strategy is not applicable for the TCIBAR, and a VVB-DPC strategy will be proposed and detailed in the next section.
4. Proposed VVB-DPC for TCIBAR
In order to break through the limitations of the classic DPC and implement the DPC strategy in TCIBAR, the concept of virtual vector is introduced to extend the original voltage vectors, and a VVB-DPC strategy with the ability to regulate the neutral-point potential is explored for the TCIBAR in this section.
4.1. Derivation of Virtual Vector
An effective solution to the first problem mentioned above is to search for a set of new voltage vectors that contain the same ZSV component, so that the change in the selected voltage vectors will not affect the ZSV across the TCI. In order to find the new voltage vectors that meet the requirement, the ZSVs of the eight basic voltage vectors are deduced first.
By defining the switching function of the three-phase bridges in TCIBAR as
Sx (
x =
a,
b,
c), the three-phase voltages across the TCI can be expressed as
where
Sx = 0 and
Sx = 1 correspond to the on-state and off-state of the upper switch in the phase bridge
x, respectively. Besides,
ε (0 <
ε < 1) is defined as the voltage coefficient of the DC-side neutral point, and
εUdc is the actual voltage of the negative DC port of TCIBAR.
Then, by applying the Park transformation to Equation (10), the ZSV applied to the TCI can be calculated as follows
Substituting the switching states of the eight basic voltage vectors into Equation (11), the corresponding ZSV component in each basic voltage vector can be obtained and shown in
Table 2.
As can be seen from
Table 2, the ZSV components in different basic voltage vectors are not all the same and have four different cases:
in
V0,
in
V1,
V3,
V5,
in
V2,
V4,
V6 and
in
V7. Meanwhile, it can be found that, among the six non-zero voltage vectors, any two adjacent non-zero voltage vectors always generate the ZSVs of
and
. Based on this observation, a set of virtual vectors, which are synthesized by every two adjacent non-zero voltage vectors, are proposed to extend the original voltage vectors, and the virtual vector
Vmn is denoted as
where
Vm and
Vn are the adjacent non-zero voltage vectors,
Ts is the control cycle, and
tm and
tn are the action time of
Vm and
Vn in one control cycle. Meanwhile, the sum of
tm and
tn is equal to
Ts.
Defining
V1,
V3, and
V5 as odd vectors and
V2,
V4, and
V6 as even vectors, it can be seen that the virtual vectors are synthesized by adjacent odd and even vectors in one control cycle. At the same time, the ZSV components in the odd and even vectors are
and
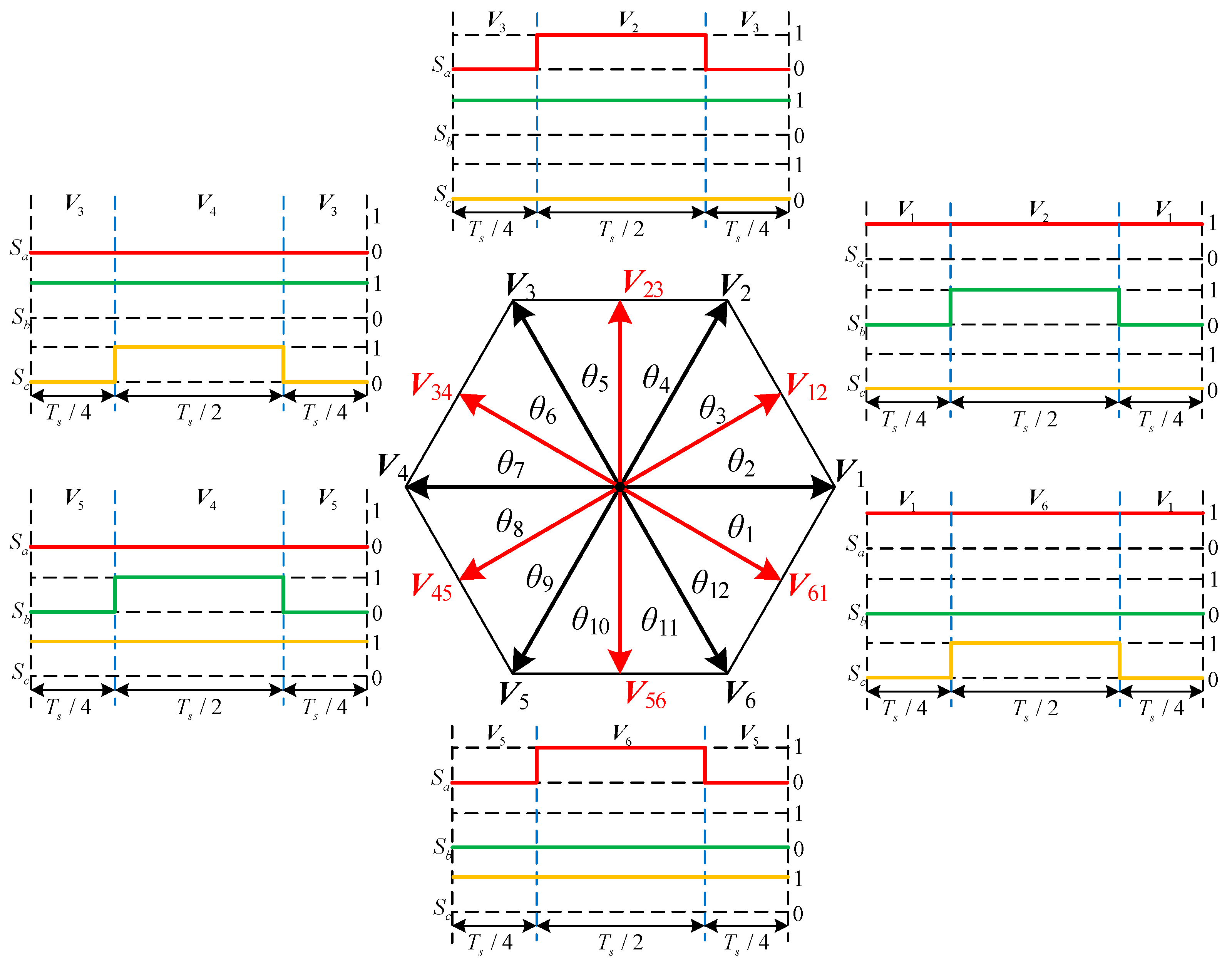
, respectively. Therefore, in order to make the ZSV component in each virtual vector equal, the odd and even vectors of each virtual vector should have the same action time ratio in one control cycle. In this paper, the action time of the even and odd vectors are set as
and
, respectively, where λ (
) is the time coefficient. On this basis, the switching functions of the virtual vectors, as well as the corresponding ZSV components, can be deduced based on the volt-second equivalent principle, as shown in
Table 3.
It can be seen, from
Table 3, that six virtual vectors can be synthesized by adjacent non-zero voltage vectors, and the virtual vectors have the same ZSV component, which can be expressed as
Besides, in order to realize the hysteresis power control of TCIBAR without affecting the DC-side neutral-point potential, the ZSV component in each virtual vector should be equal to zero, that is,
ul0 = 0. Meanwhile, considering that the bipolar DC voltages of the TCIBAR should be symmetrical in the HVDC power system of MEA, the voltage coefficient
ɛ should be equal to 0.5 in the steady state. Substituting
ul0 = 0 and
ɛ = 0.5 into Equation (13), the time coefficient
λ can be calculated as
Therefore, the time coefficient
λ is selected as 0.5 in this paper, which means that the adjacent odd and even vectors will each act for half of the control cycle to synthesize the desired virtual vectors. On this basis, the six virtual vectors adopted in this paper and their switching sequences are determined, as shown in
Figure 4. When the proposed six virtual vectors are used to implement the hysteresis power control of TCIBAR, the ZSV applied to the TCI can remain unchanged, so the zero-sequence current in the TCI will not be out of control under the action of virtual vectors.
4.2. Switching Table Based on Virtual Vectors
As described in
Section 3, the switching table is the key element of the DPC strategy. Therefore, in order to establish the switching table based on the virtual vectors and realize the hysteresis power control of TCIBAR, it is necessary to analyze the effect of each virtual vector on the power variation of TCIBAR.
Ignoring the winding resistance
Rs, the AC-source branch of TCIBAR satisfies the vector equation in Equation (15),
where
Is(0) and
Is(
t) are the AC-source current vector at time 0 and time
t, and
E is the AC-source voltage vector.
Considering that the vector
E−
Vmn remains almost unchanged in one control cycle
Ts, the variation of the AC-source current vector (Δ
Is) in a control cycle can be deduced according to Equation (15), as shown in Equation (16).
In addition, based on the power calculation formula in the
dq coordinate system, the power variation in one control cycle can be calculated as
where Δ
Id and Δ
Iq are the projection components of Δ
Is on the
d-axis and
q-axis, and
γ is the angle between Δ
Is and the
d-axis.
By substituting Equation (16) into Equation (17), the relationship between the vector
E−
Vmn and the power variation can be obtained as follows:
It can be seen from Equation (18) that the active power variation depends on the projection of
E−Vmn on the
d-axis, while the reactive power variation is determined by the projection of
E−Vmn on the
q-axis. Therefore, the effect of each virtual vector on the power variation of TCIBAR can be obtained according to the direction and amplitude of the projection of
E−Vmn on the
d-axis and
q-axis. Taking the AC-source voltage vector
E in the sector
θ3 as an example, the effect of different voltage vectors on the power variation of TCIBAR can be analyzed, and
Figure 5a shows the effect of the virtual vector
V56. In the meantime, the vector space can be divided into four areas according to the signs of the active and reactive power variation rates, as shown in
Figure 5b.
It can be seen from
Figure 5b that when the AC-source voltage vector
E is in the sector
θ3, the virtual vectors
V34,
V45,
V56, and
V61 will increase the active power of TCIBAR, while
V12 and
V23 will decrease the active power. At the same time, the reactive power of the TCIBAR will be increased by the virtual vectors
V23,
V34, and
V45 and decreased by
V56,
V61, and
V12. Thus, the appropriate virtual vector can be selected according to the outputs of the power hysteresis comparators. Similarly, when the AC-source voltage vector
E is in other eleven sectors, the same analysis method is used to select the corresponding virtual vectors and the complete virtual-vector switching table can be established, as shown in
Table 4.
Based on the virtual-vector switching table, the hysteresis power control of the TCIBAR can be realized, which results in an effective control of the DC bus voltage and AC-side power factor of the TCIBAR. Meanwhile, the DC-side neutral point potential will not be affected by the change in the selected virtual vectors.
4.3. Neutral-Point Potential Control Method Based on DPC Architecture
In order to maintain the voltage balance between the bipolar DC ports under unbalanced load conditions, a neutral-point potential control method based on DPC architecture is studied for the TCIBAR. As analyzed in
Section 2, the DC-side neutral-point potential of the TCIBAR can be regulated by the closed-loop control of the zero-sequence current in TCI, which is directly determined by the ZSV across the TCI. Thus, the key to the neutral-point potential control is the generation of the reference and actual values of ZSV.
First, in order to obtain the reference ZSV, a double closed-loop control algorithm is constructed with PI controllers, and the control variables of the outer and inner loops are the voltage difference between bipolar DC ports (Δ
u) and the zero-sequence current in TCI (
il0), respectively. Meanwhile, the PI controllers of Δ
u and
il0 can be designed by referring to the classical PI parameter design method in [
33,
34]. Based on this control algorithm, the reference value of ZSV can be obtained. However, since there is no voltage modulation module in the DPC architecture, the accurate generation of the actual ZSV is the critical problem in the neutral-point potential control of TCIBAR.
Substituting the switching states of six virtual vectors and two zero vectors into Equation (11), the actual ZSV components in virtual vectors and zero vectors can be derived, as shown in
Table 5.
It can be seen from
Table 5 that the actual ZSV components in different voltage vectors are related to the neutral-point potential of the TCIBAR, which has three different cases: (1)
in virtual vectors; (2)
in
V7; and (3)
in
V0. Because of the constraint that
, the ZSV components in
V0 and
V7 always have the opposite signs, and the three cases of the ZSV components satisfy the following inequality:
In addition, considering that the zero vectors do not affect the reactive power of the converter and have a weak influence on the active power, the actual ZSV can be accurately generated by inserting a zero vector (V0 or V7) with a certain duty ratio into the selected virtual vector within one control cycle. Meanwhile, the inserted zero vector and its action time are dependent on the reference value of the ZSV () and can be categorized as the following two cases.
In this case, the reference ZSV is greater than the actual ZSV component in the virtual vector. Therefore, the zero vector V7 is inserted, and the action time can be calculated as follows: where tmn and t7 are the action time of the selected virtual vector and the zero vector V7.
By solving the Equation (21), the action time tmn and t7 can be obtained as In this case, the zero vector V0 is inserted to synthesize the reference ZSV, and the action time can be calculated aswhere t0 is the action time of V0. Similarly, tmn and t0 can be obtained as follows: According to the above analysis and design, the action time of the selected virtual vector and zero vector in one control cycle is obtained, and the desired ZSV can be generated accurately. On this basis, the neutral-point potential control of TCIBAR can be successfully implemented in the DPC architecture.
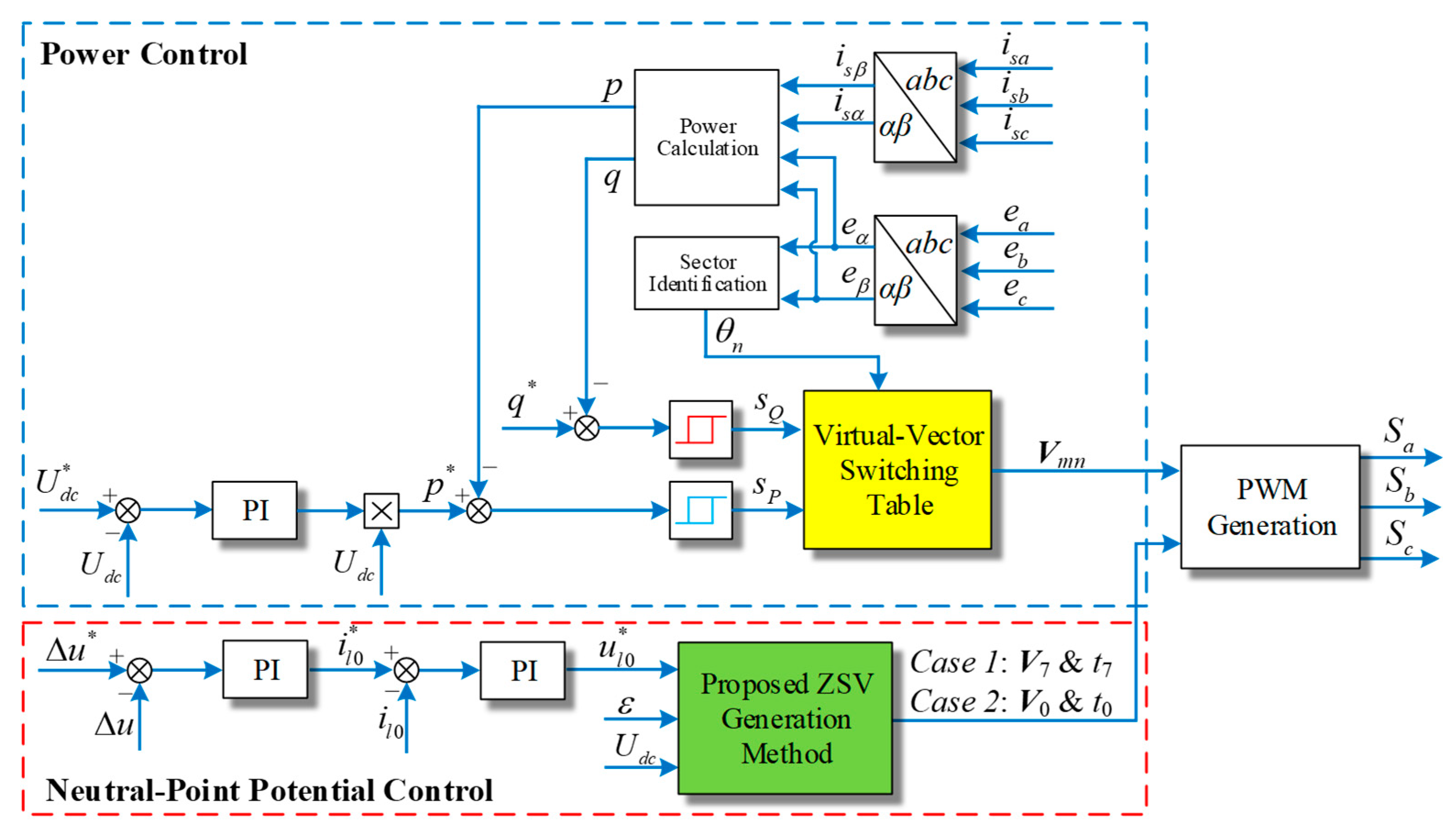
4.4. Overall Control Block Diagram of the Proposed VVB-DPC
Based on the above research and analysis, the overall control block diagram of the proposed VVB-DPC strategy is obtained, as shown in
Figure 6.
As can be seen from
Figure 6, the proposed VVB-DPC strategy mainly consists of power control and neutral-point potential control. Compared with the classic DPC strategy shown in
Figure 2, the VVB-DPC strategy introduces the virtual vectors to realize the hysteresis power control of the TCIBAR and can avoid the runaway of the zero-sequence current in TCI. Besides, the neutral-point potential control of the TCIBAR can be achieved by inserting an appropriate zero vector with a certain duty ratio in one control cycle.
5. Simulation Results
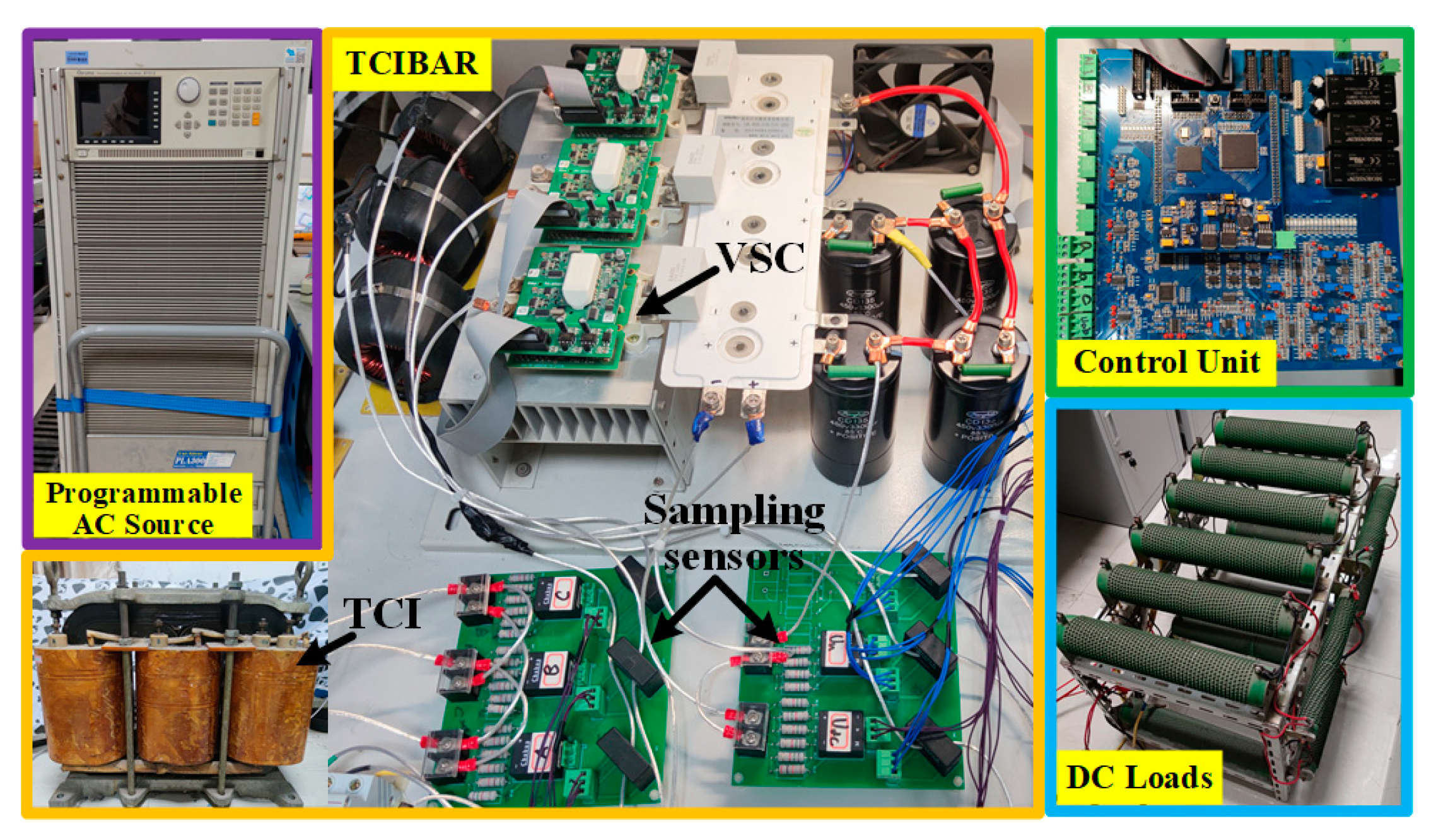
To verify the performance of the proposed VVB-DPC strategy, the simulation of a TCIBAR was carried out based on the software PLECS. The sampling frequency is 20 kHz, and the rated parameters of the TCIBAR are listed in
Table 6, which were used in both the simulations and experiments.
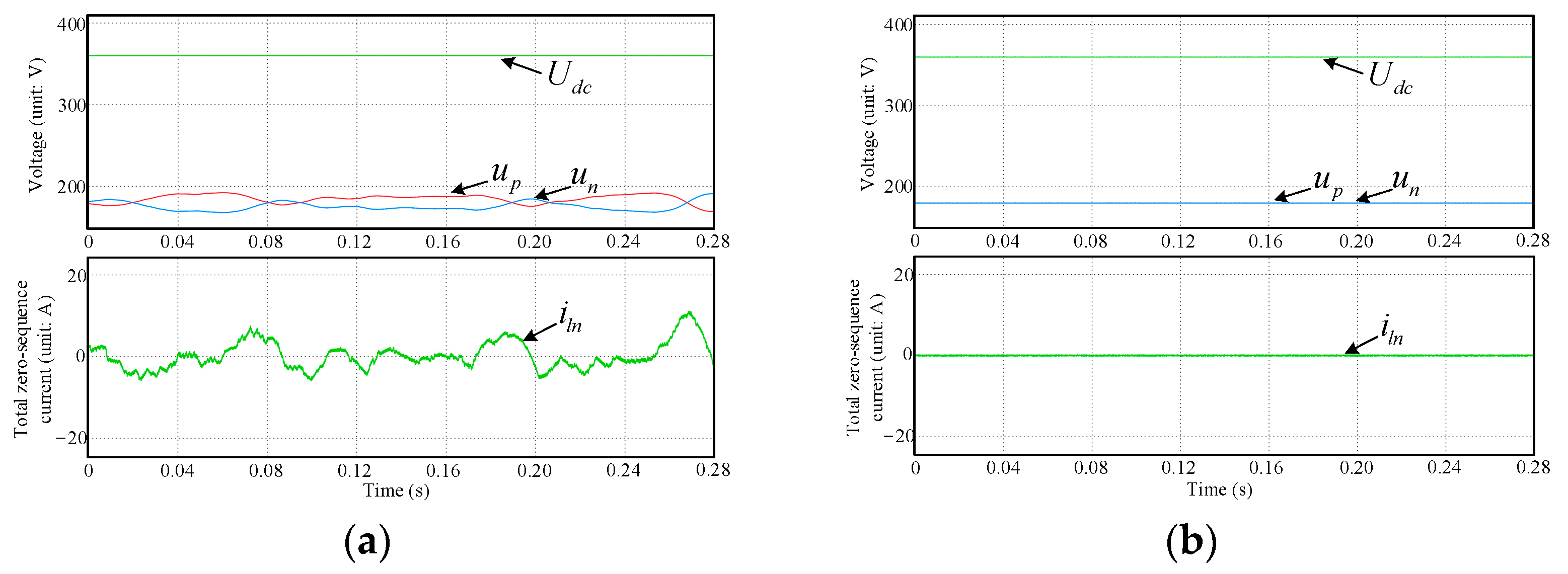
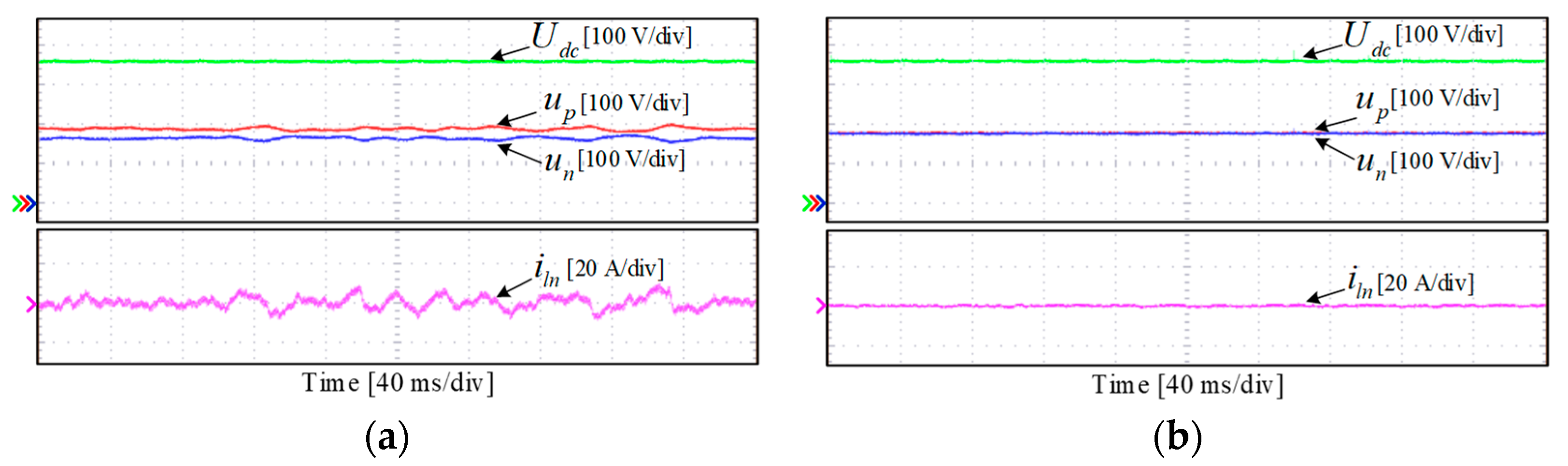
The simulations of the classic switching table and the proposed virtual-vector switching table have been performed, respectively, and the corresponding results are shown in
Figure 7. As can be seen, the classic switching table causes an uncontrollable total zero-sequence current (
iln) in the TCI and leads to a voltage imbalance between the bipolar DC ports. However, the proposed switching table does not affect the zero-sequence current in TCI and can realize the effective control of both the DC bus voltage and neutral-point potential, which verifies the feasibility of the proposed VVB-DPC strategy.
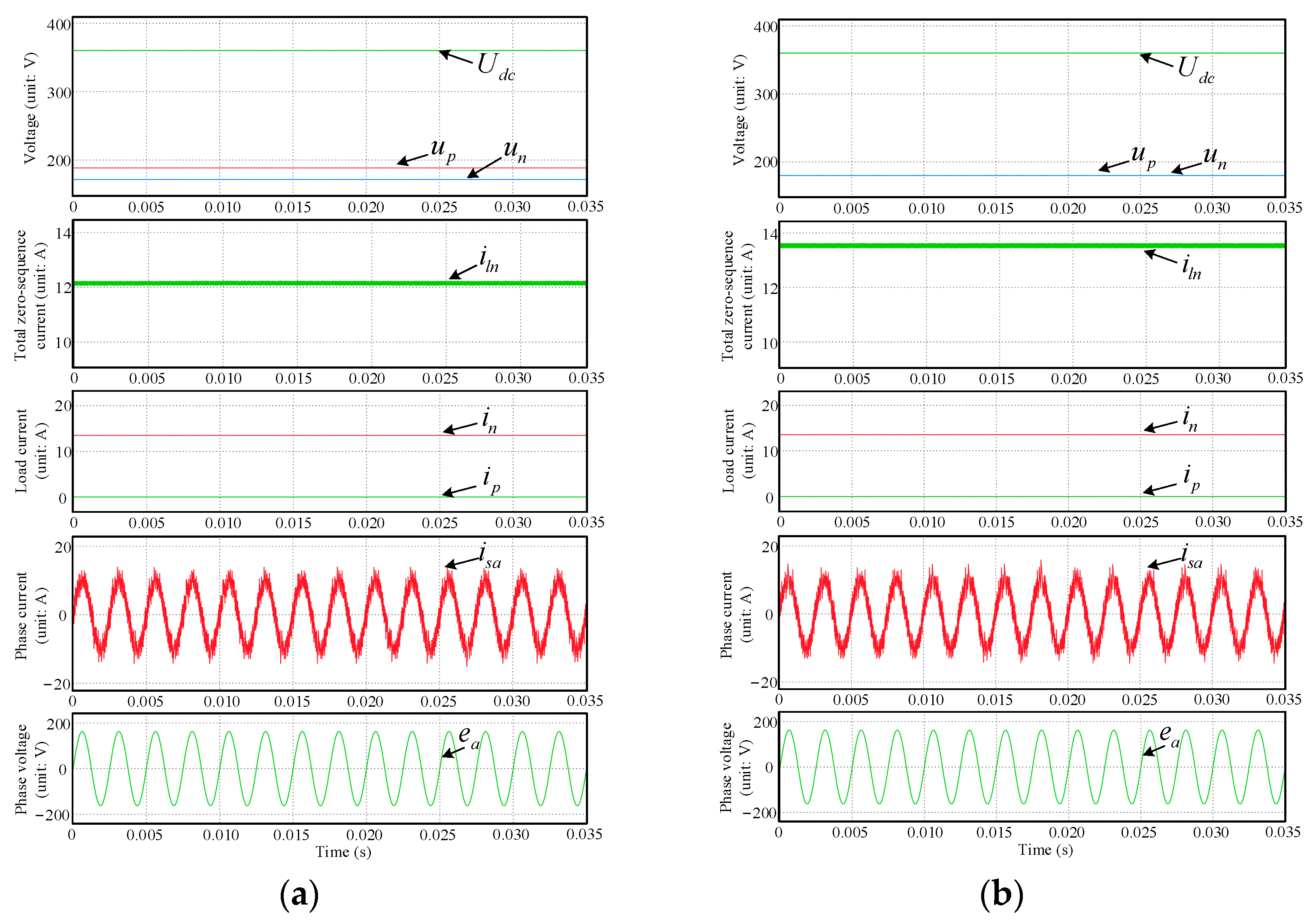
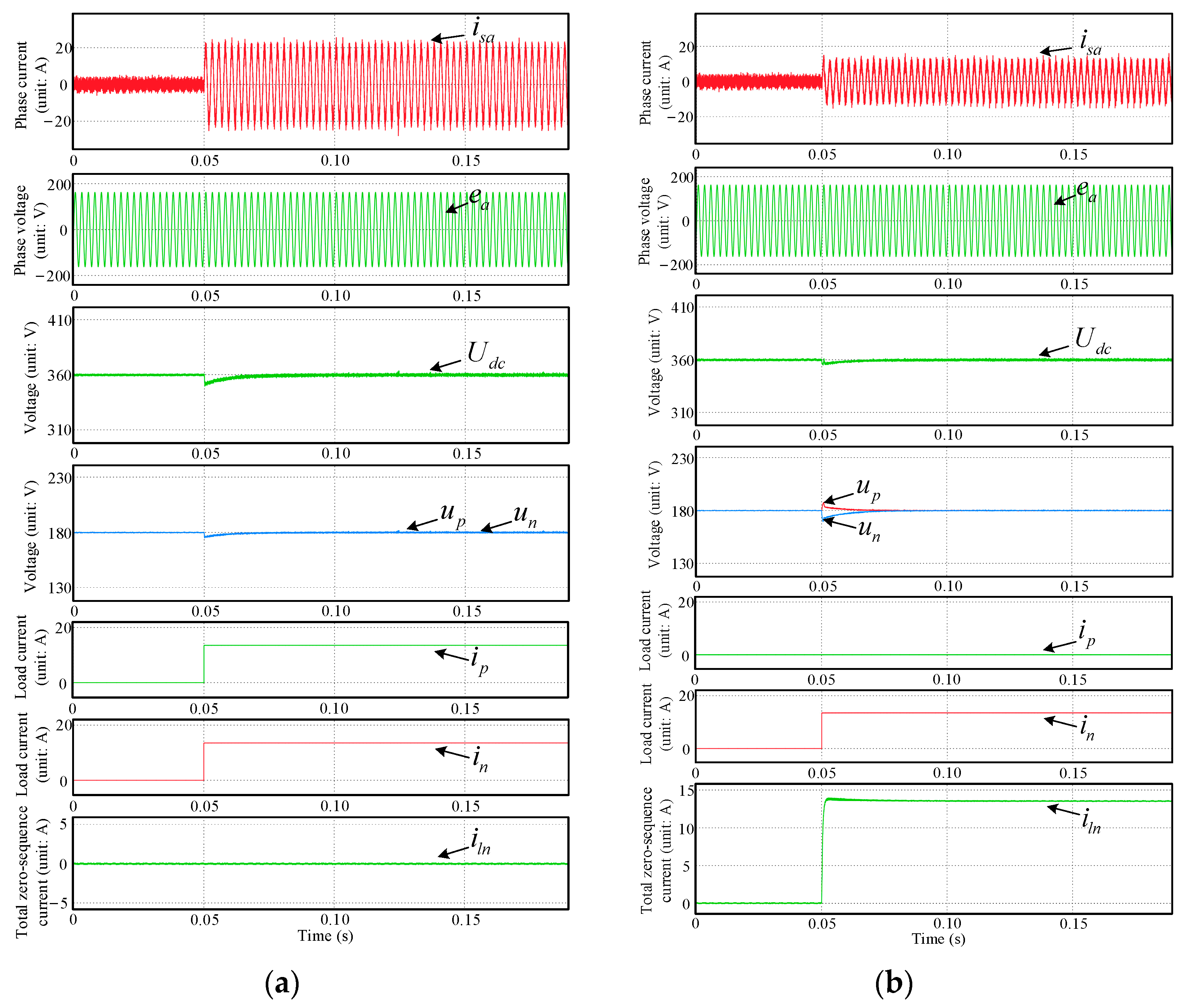
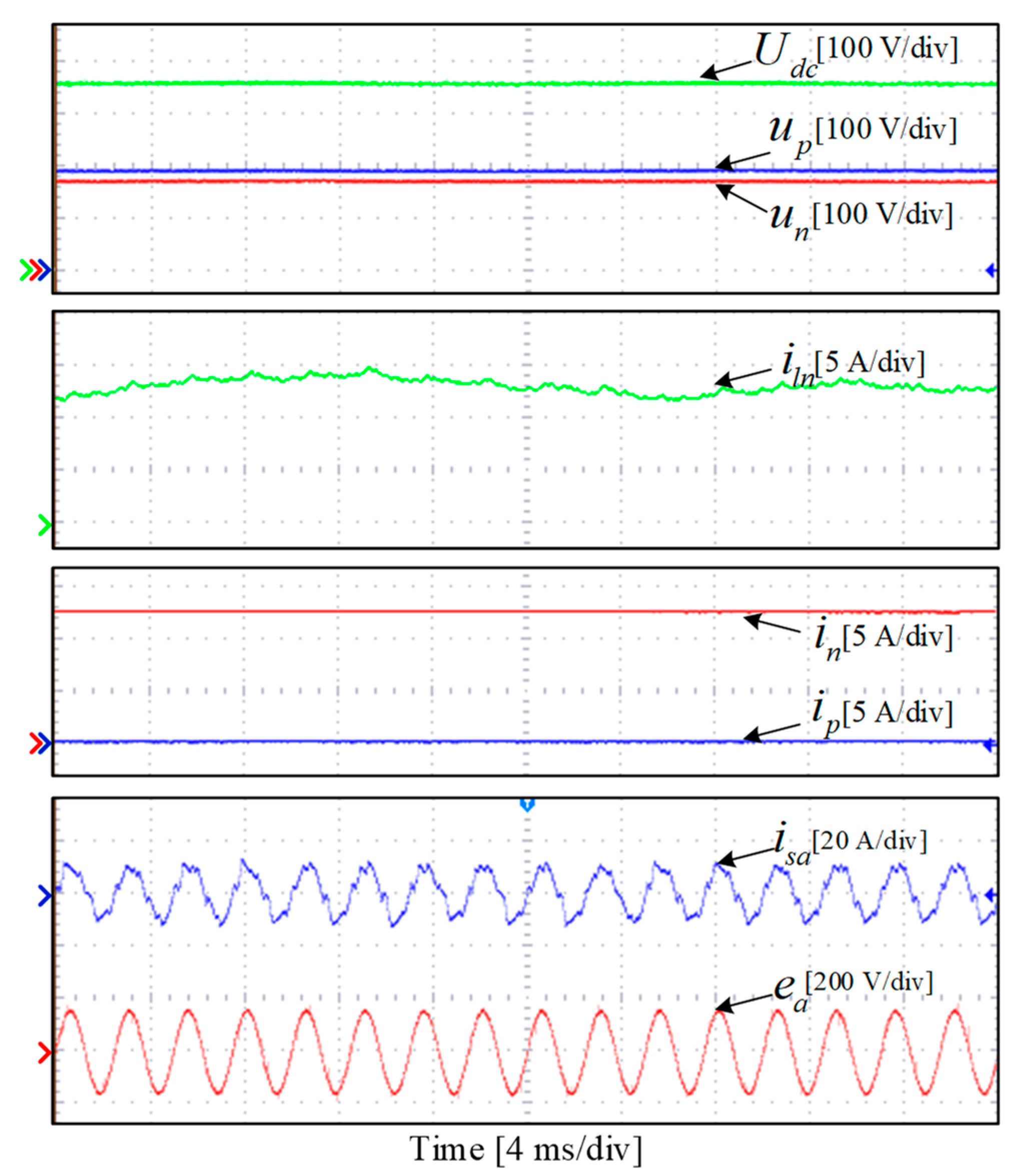
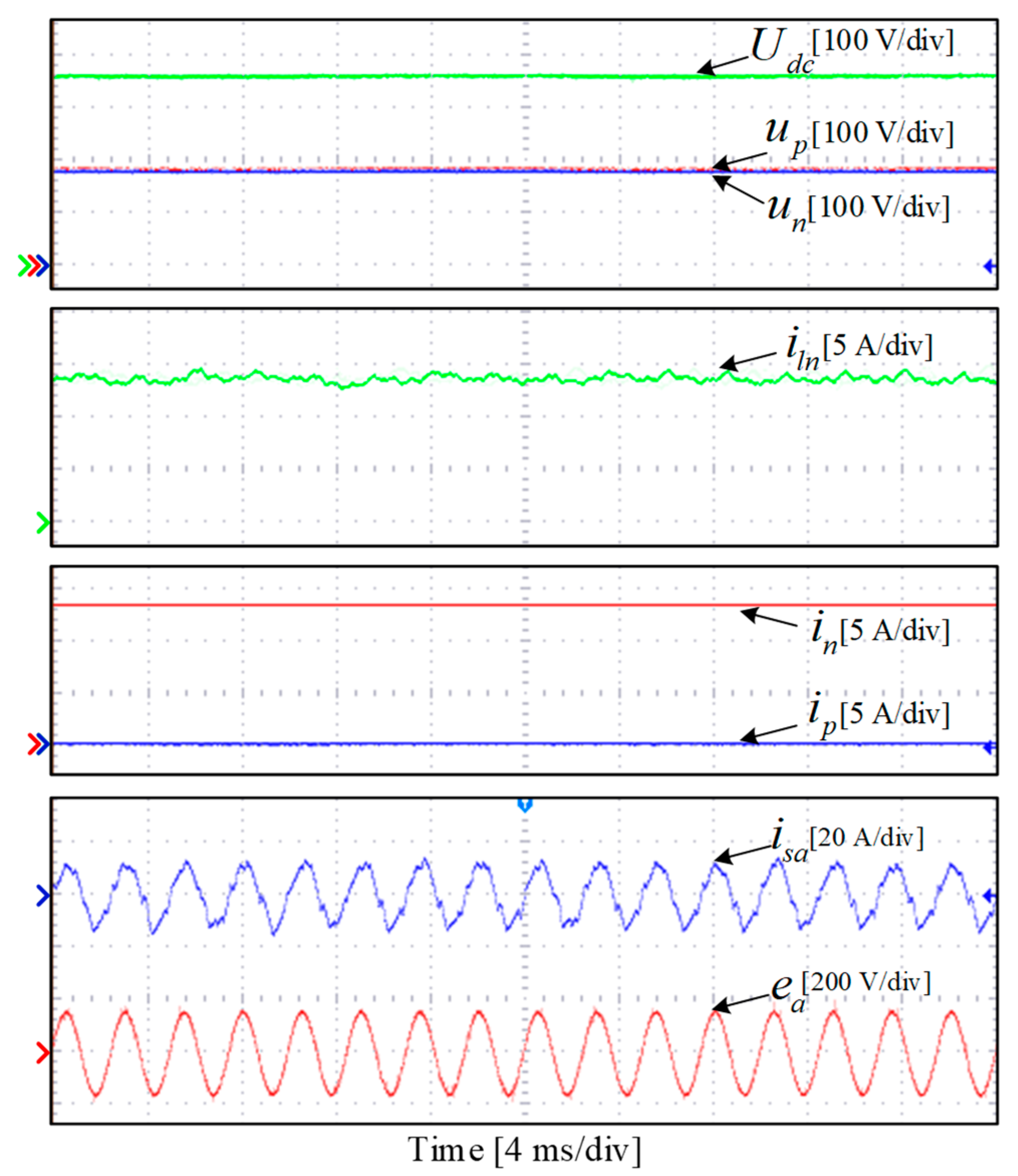
The simulation results under unbalanced load condition are shown in
Figure 8, where only the negative DC port of TCIBAR is connected with a 13.3 Ω resistor. To better demonstrate the effect of the proposed neutral-point potential control method, the simulation results with and without the neutral-point potential control are presented in
Figure 8a,b for comparison. It can be seen from
Figure 8 that the proposed neutral-point potential control method can effectively eliminate the voltage imbalance between the bipolar DC ports under unbalanced load conditions.
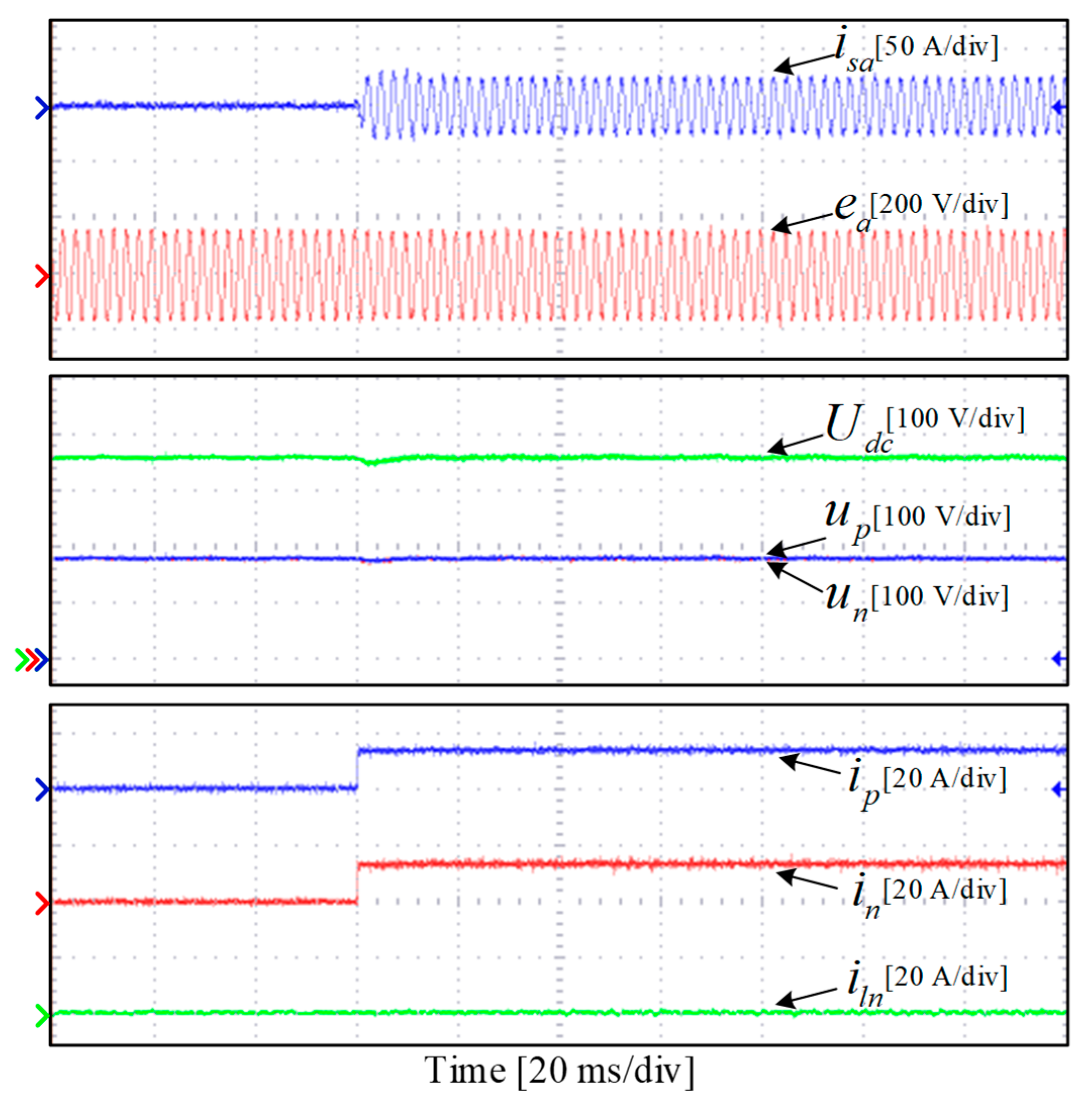
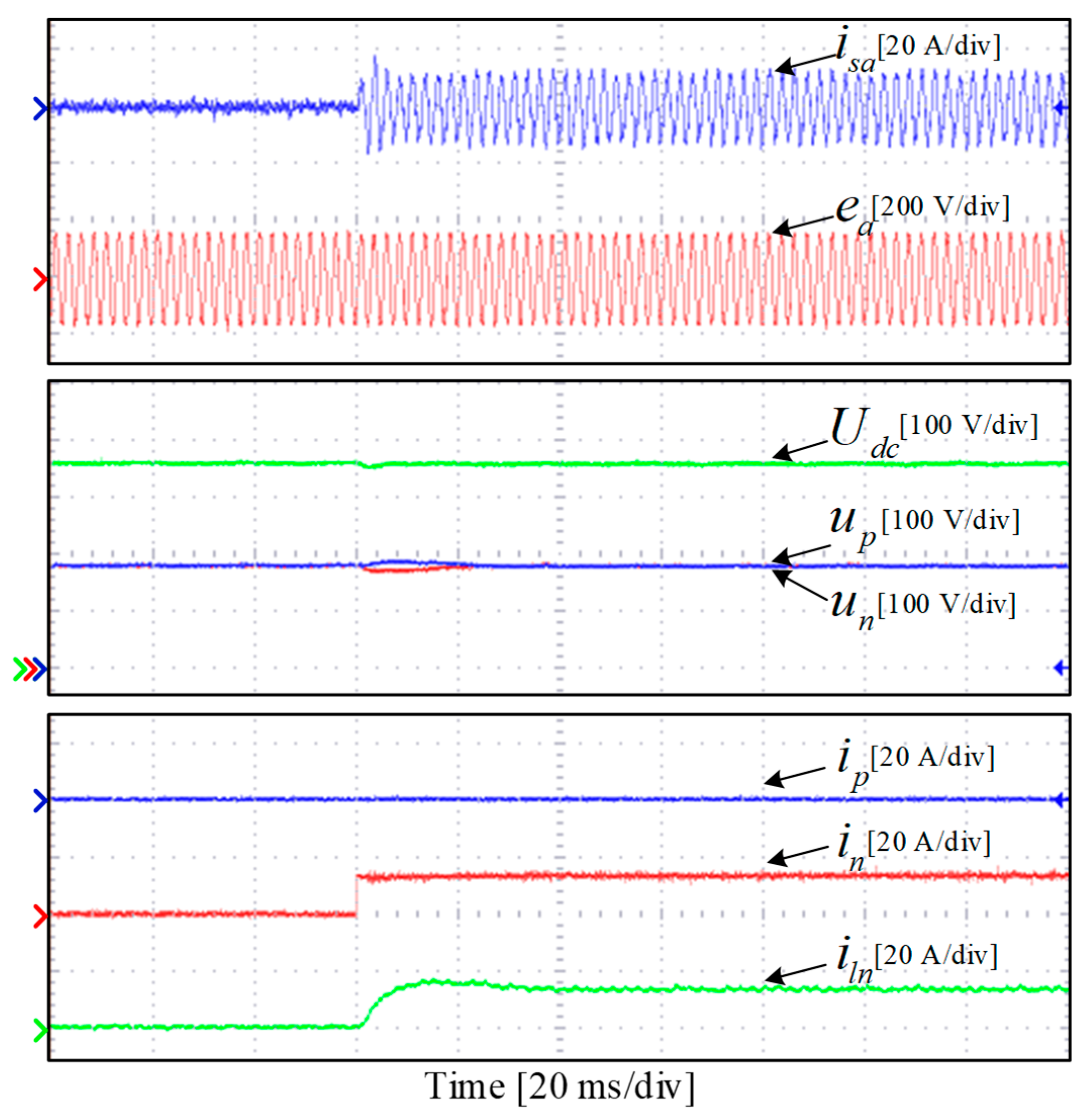
Figure 9 further presents the dynamic simulation results of the proposed VVB-DPC strategy under balanced and unbalanced load conditions, where the unbalanced load condition is the same as above, and the balanced load condition is constructed by connecting 13.3 Ω resistors to both the positive and negative DC ports. As can be seen, the proposed VVB-DPC strategy can not only respond immediately to restore the DC bus voltage to the rated value, but also quickly rebalance the DC voltages between the bipolar DC ports after the unbalanced load is switched on.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}