
Grid-Connected Phase-Locked Loop Technology Based on a Cascade Second-Order IIR Filter
Abstract
:1. Introduction
2. Analysis of the Standard MAF-PLL
3. The Proposed Method
3.1. Zero–Pole Replacement
3.2. Selection of Parameter r
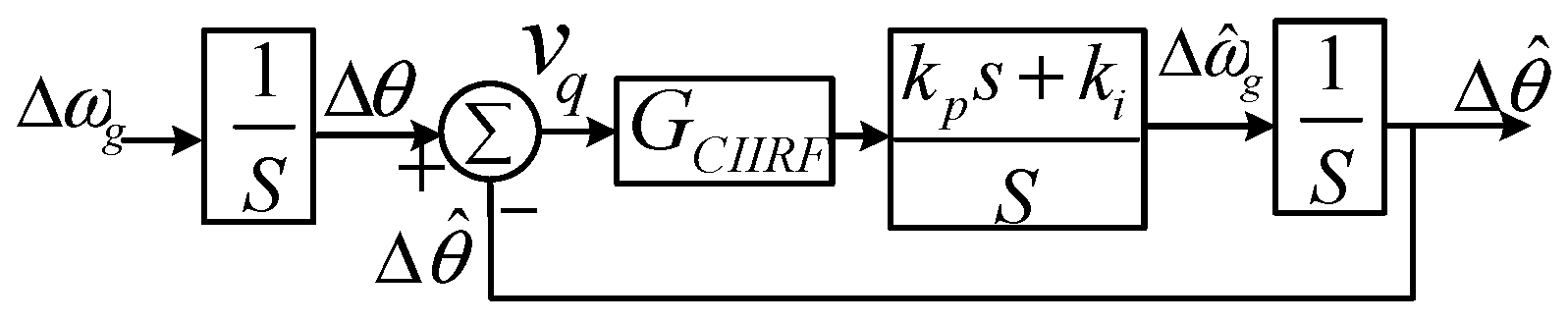
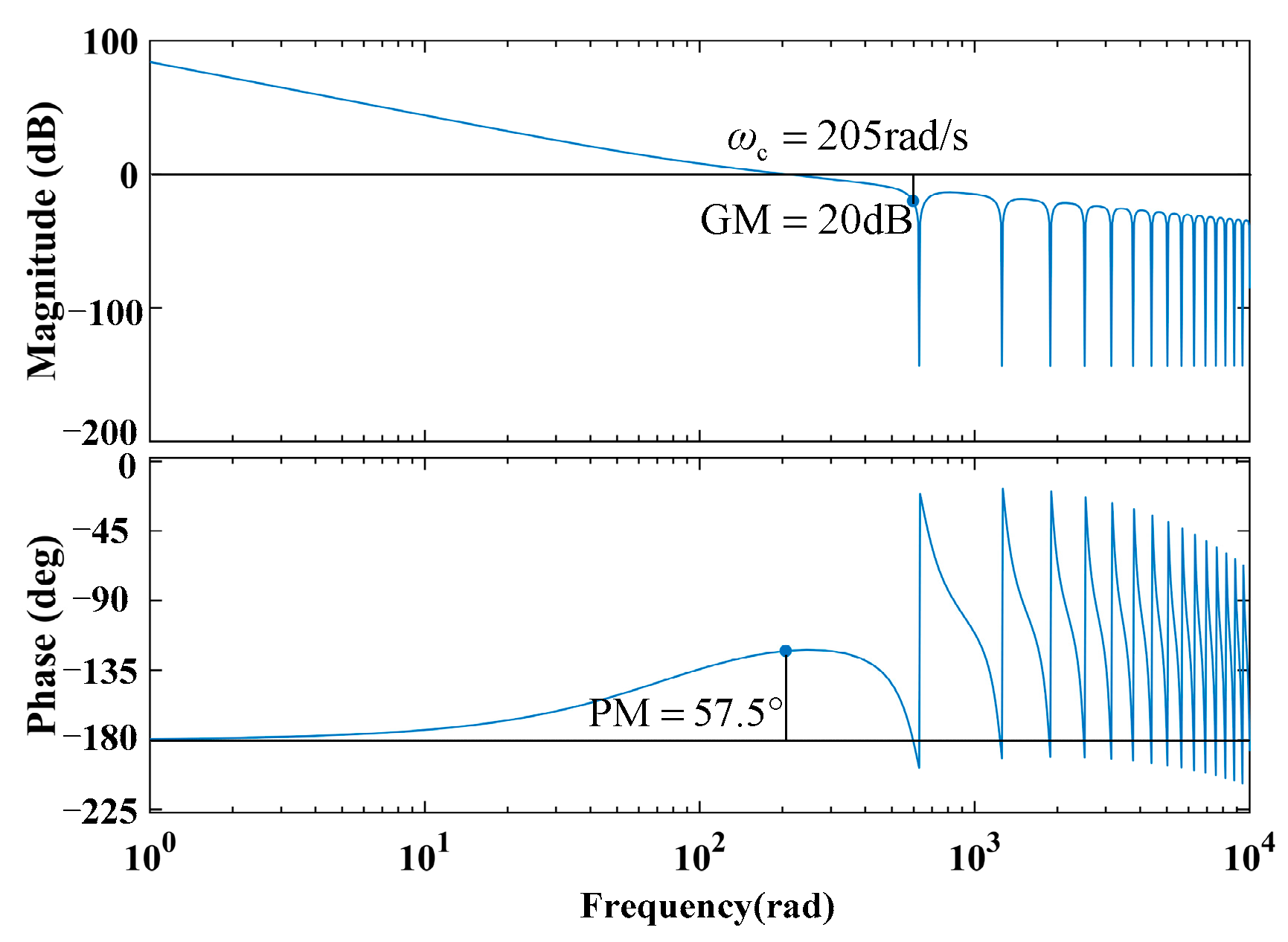
4. PI-Type Controller Parameter Design
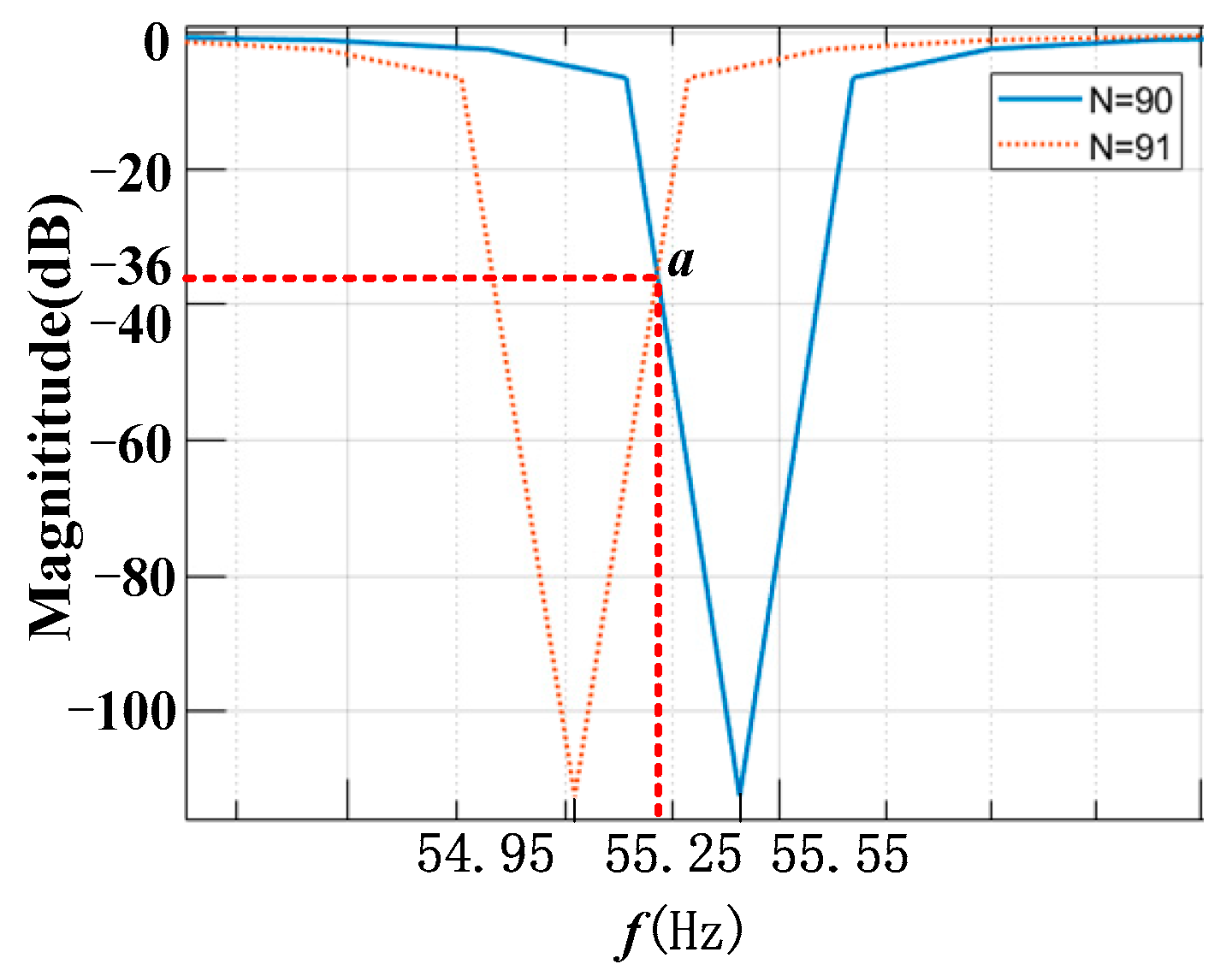
5. Frequency-Adaptive CIIRF Implementation
6. Simulation Analysis and Experimental Result
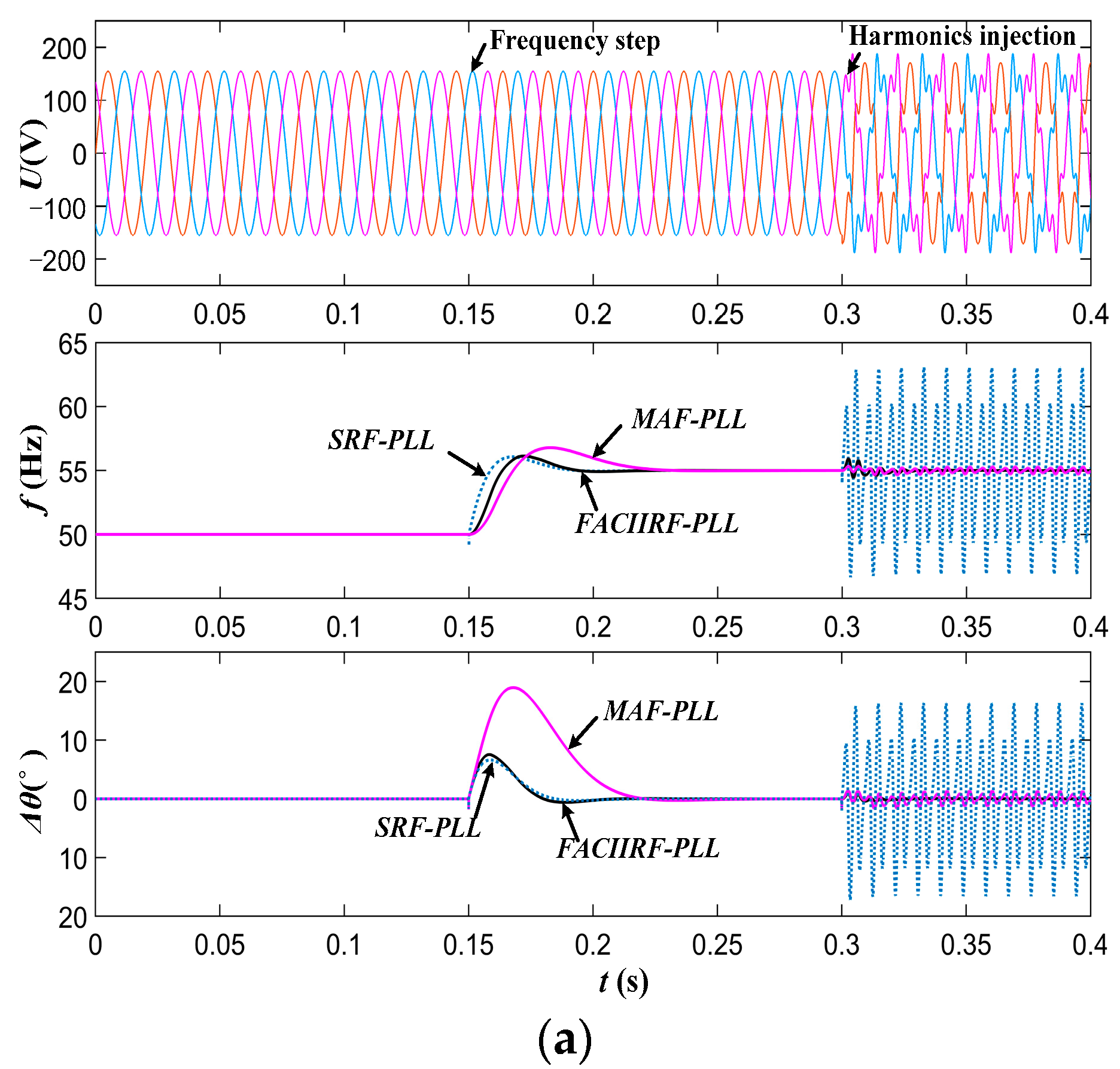
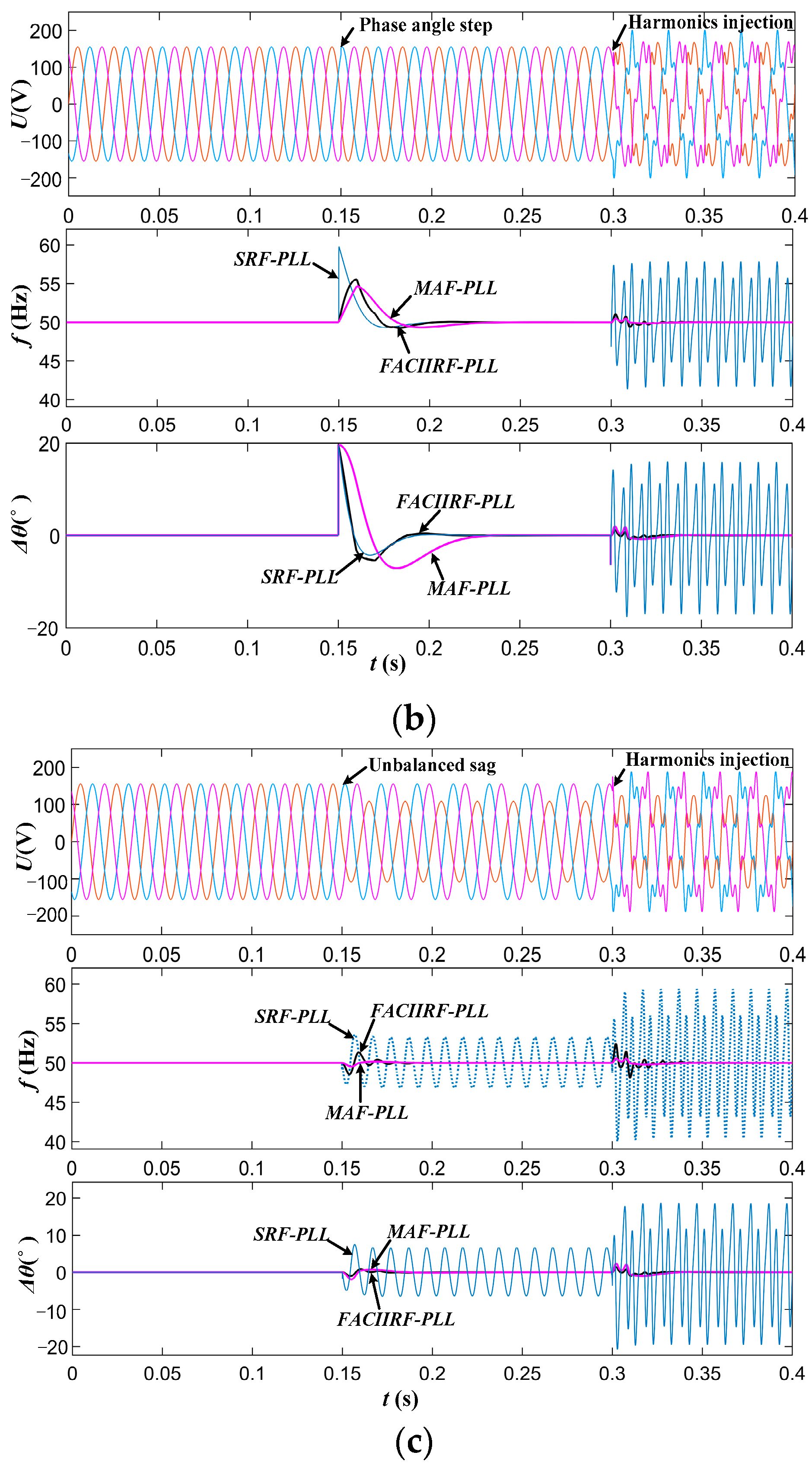
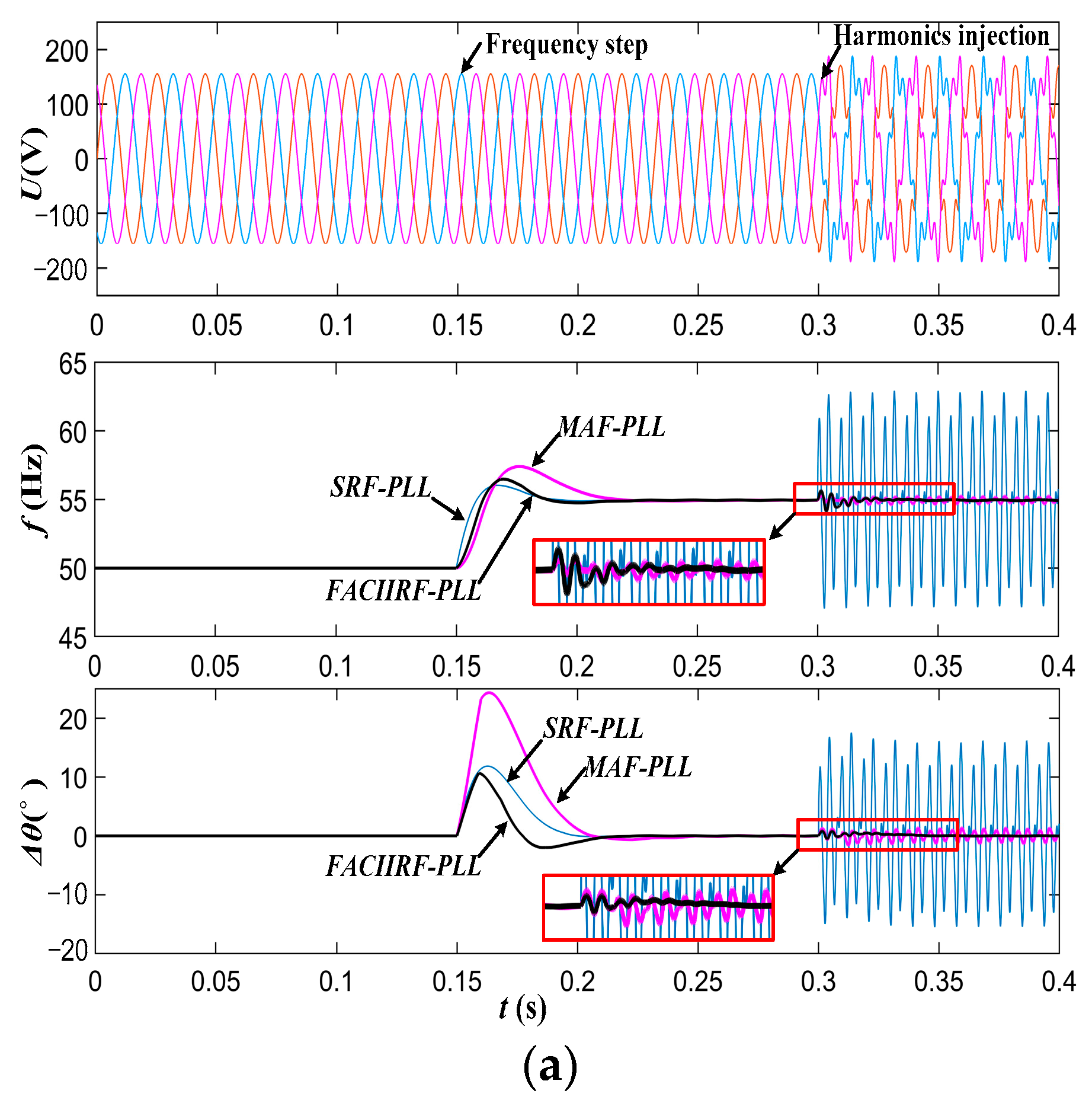
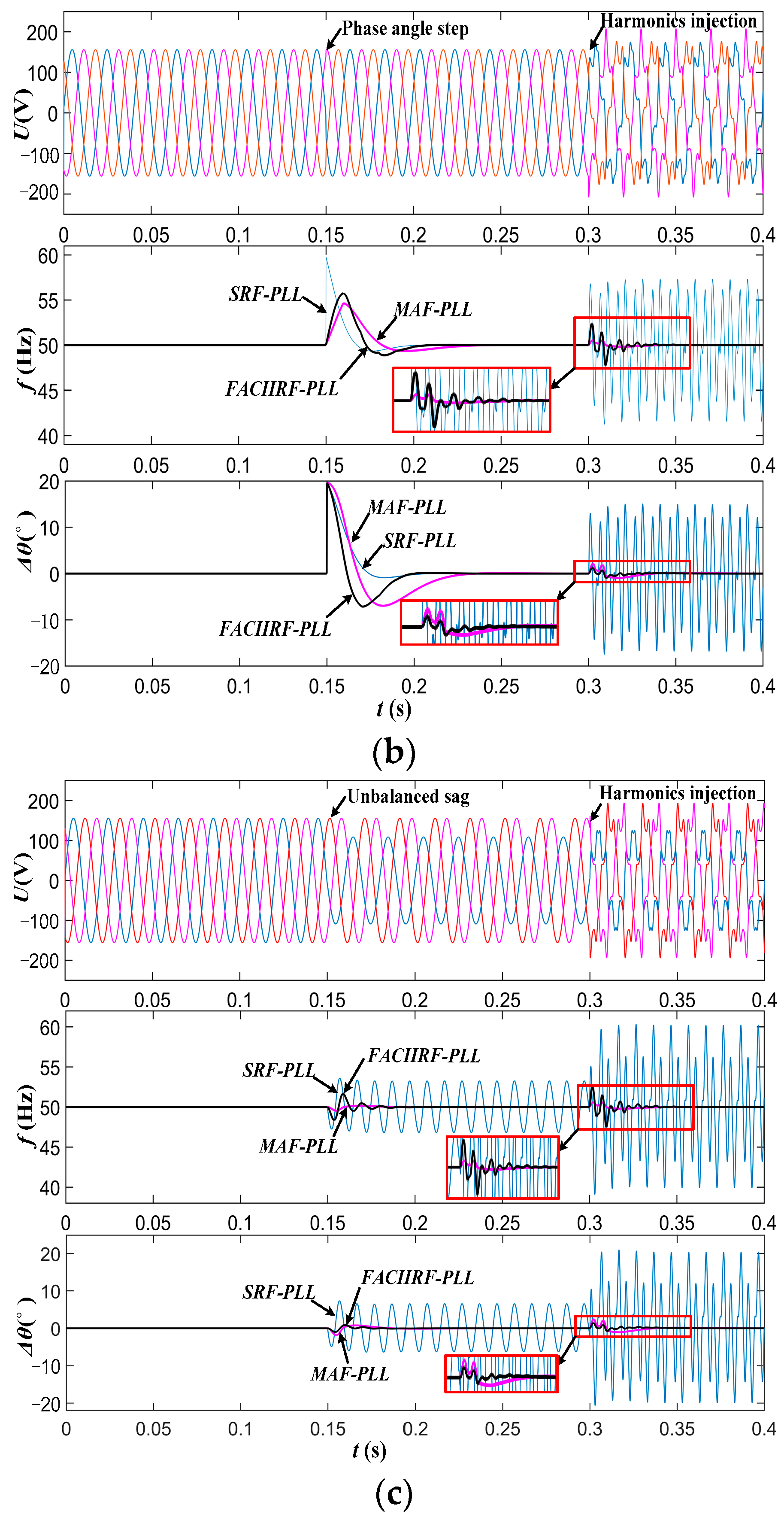
6.1. Simulation Analysis
- Case 1: The grid voltage undergoes a frequency step change of +5 Hz at time 0.15 s and injection of 0.2 pu for the 5th harmonic, 0.1 pu for the 7th harmonic, and 0.05 pu for the 11th harmonic at time 0.3 s.
- Case 2: The grid voltage undergoes a phase angle jump of +20° at time 0.15 s and an injection of 0.2 pu for the 5th harmonic, 0.1 pu for the 7th harmonic, and 0.05 pu for the 11th harmonic at time 0.3 s.
- Case 3: The grid voltage undergoes an A-phase amplitude drop of 0.3 pu at time 0.15 s and an injection of 0.2 pu for the 5th harmonic, 0.1 pu for the 7th harmonic, and 0.05 pu for the 11th harmonic at time 0.3 s.
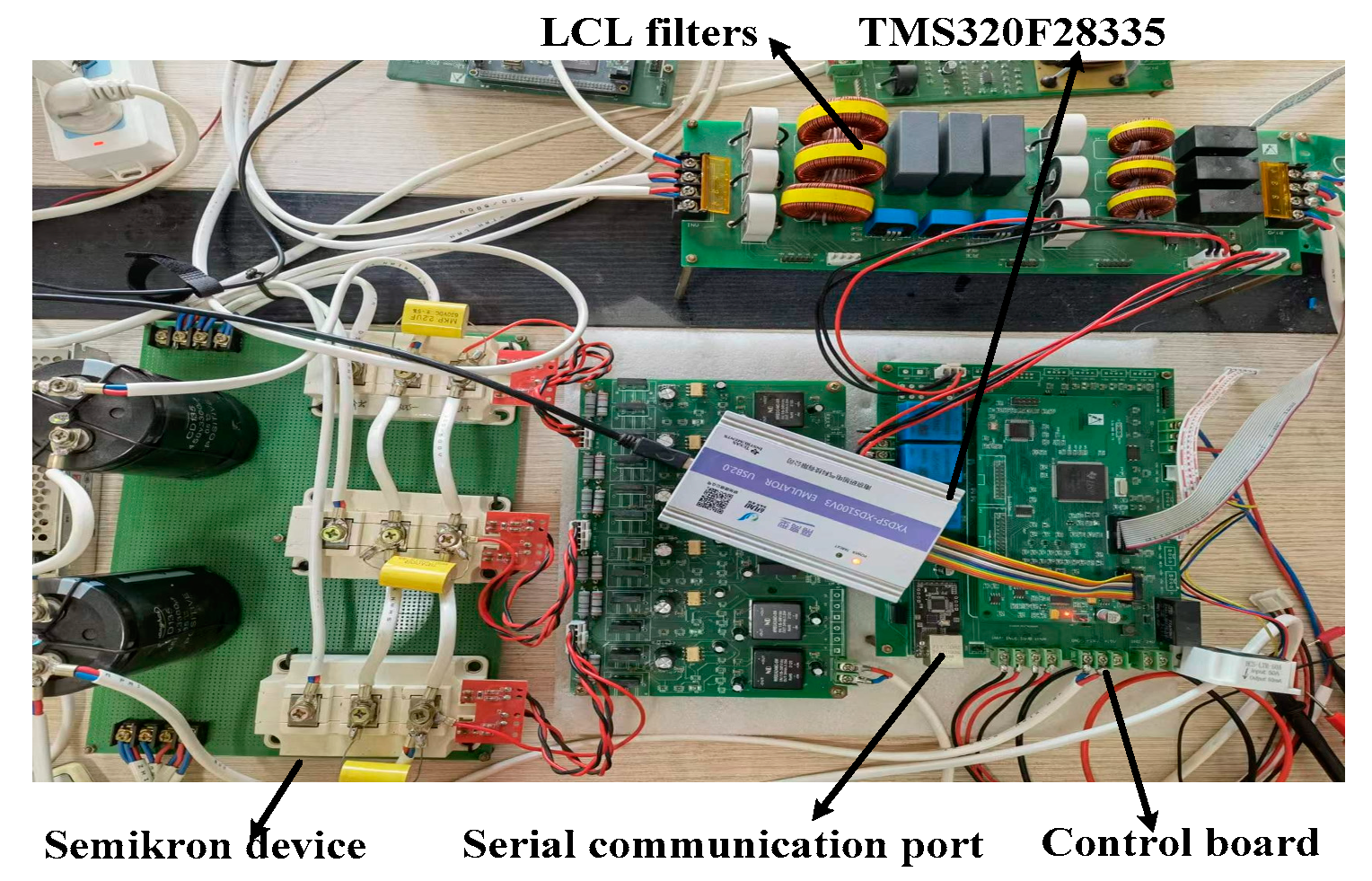
6.2. Experimental Results
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Golestan, S.; Guerrero, J.M.; Vasquez, J.C. Single-phase PLLs: A review of recent advances. IEEE Trans. Power Electron. 2017, 32, 9013–9030. [Google Scholar] [CrossRef]
- Hans, F.; Schumacher, W.; Harnefors, L. Small-Signal Modeling of Three-Phase Synchronous Reference Frame Phase-Locked Loops. IEEE Trans. Power Electron. 2017, 33, 5556–5560. [Google Scholar] [CrossRef]
- Dong, D.; Wen, B.; Boroyevich, D.; Mattavelli, P.; Xue, Y. Analysis of Phase-Locked Loop Low-Frequency Stability in Three-Phase Grid-Connected Power Converters Considering Impedance Interactions. IEEE Trans. Ind. Electron. 2015, 62, 310–321. [Google Scholar] [CrossRef]
- Golestan, S.; Guerrero, J.; Vasquez, J. Three-Phase PLLs: A Review of Recent Advances. IEEE Trans. Power Electron. 2017, 32, 1894–1907. [Google Scholar] [CrossRef]
- Rodriguez, P.; Luna, A.; Munoz-Aguilar, R.S.; Etxeberria-Otadui, I.; Teodorescu, R.; Blaabjerg, F. A Stationary Reference Frame Grid Synchronization System for Three-Phase Grid-Connected Power Converters Under Adverse Grid Conditions. IEEE Trans. Power Electron. 2011, 27, 99–112. [Google Scholar] [CrossRef]
- Rodriguez, P.; Teodorescu, R.; Candela, I.; Timbus, A.V.; Liserre, M.; Blaabjerg, F. New positive-sequence voltage detector for grid synchronization of power converters under faulty grid conditions. In Proceedings of the 2006 37th IEEE Power Electronics Specialists Conference, Jeju, Republic of Korea, 18–22 June 2006. [Google Scholar]
- Xie, M.; Wen, H.; Zhu, C.; Yang, Y. DC Offset Rejection Improvement in Single-Phase SOGI-PLL Algorithms: Methods Review and Experimental Evaluation. IEEE Access 2017, 5, 12810–12819. [Google Scholar] [CrossRef]
- Wang, J.; Liang, J.; Gao, F.; Zhang, L.; Wang, Z. A Method to Improve the Dynamic Performance of Moving Average Filter-Based PLL. IEEE Trans. Power Electron. 2015, 30, 5978–5990. [Google Scholar] [CrossRef]
- Golestan, S.; Guerrero, J.M.; Vidal, A.; Yepes, A.G.; Doval-Gandoy, J. PLL With MAF-Based Prefiltering Stage: Small-Signal Modeling and Performance Enhancement. IEEE Trans. Power Electron. 2016, 31, 4013–4019. [Google Scholar] [CrossRef]
- Golestan, S.; Ramezani, M.; Guerrero, J.M.; Freijedo, F.D.; Monfared, M. Moving Average Filter Based Phase-Locked Loops: Performance Analysis and Design Guidelines. IEEE Trans. Power Electron. 2014, 29, 2750–2763. [Google Scholar] [CrossRef]
- Karimi-Ghartemani, M.; Khajehoddin, S.A.; Jain, P.K.; Bakhshai, A.; Mojiri, M. Addressing DC Component in PLL and Notch Filter Algorithms. IEEE Trans. Power Electron. 2012, 27, 78–86. [Google Scholar] [CrossRef]
- Lee, K.J.; Lee, J.P.; Shin, D.; Yoo, D.W.; Kim, H.J. A Novel Grid Synchronization PLL Method Based on Adaptive Low-Pass Notch Filter for Grid-Connected PCS. IEEE Trans. Ind. Electron. 2013, 61, 292–301. [Google Scholar] [CrossRef]
- Li, Y.; Wang, D.; Han, W.; Tan, S.; Guo, X. Performance Improvement of Quasi-Type-1 PLL by using a Complex Notch Filter. IEEE Access 2016, 4, 6272–6282. [Google Scholar] [CrossRef]
- Golestan, S.; Guerrero, J.M.; Vasquez, J.C. Steady-State Linear Kalman Filter-Based PLLs for Power Applications: A Second Look. IEEE Trans. Ind. Electron. 2018, 65, 9795–9800. [Google Scholar] [CrossRef]
- Wang, Y.F.; Li, Y.W. Analysis and Digital Implementation of Cascaded Delayed-Signal-Cancellation PLL. IEEE Trans. Power Electron. 2011, 26, 1067–1080. [Google Scholar] [CrossRef]
- Golestan, S.; Ramezani, M.; Guerrero, J.M.; Monfared, M. dq-Frame Cascaded Delayed Signal Cancellation- Based PLL: Analysis, Design, and Comparison With Moving Average Filter-Based PLL. IEEE Trans. Power Electron. 2015, 30, 1618–1632. [Google Scholar] [CrossRef]
- Gude, S.; Chu, C.C. Three-Phase PLLs by Using Frequency Adaptive Multiple Delayed Signal Cancellation Prefilters Under Adverse Grid Conditions. IEEE Trans. Ind. Appl. 2018, 54, 3832–3843. [Google Scholar] [CrossRef]
- Rodriguez, P.; Luna, A.; Candela, I.; Mujal, R.; Teodorescu, R.; Blaabjerg, F. Multiresonant Frequency-Locked Loop for Grid Synchronization of Power Converters Under Distorted Grid Conditions. IEEE Trans. Ind. Electron. 2010, 58, 127–138. [Google Scholar] [CrossRef]
- Karimi-Ghartemani, M.; Iravani, M.R. A Method for Synchronization of Power Electronic Converters in Polluted and Variable-Frequency Environments. IEEE Trans. Power Syst. 2004, 19, 1263–1270. [Google Scholar] [CrossRef]
- Golestan, S.; Freijedo, F.D.; Vidal, A.; Guerrero, J.M.; Doval-Gandoy, J. A Quasi-Type-1 Phase-Locked Loop Structure. IEEE Trans. Power Electron. 2014, 29, 6264–6270. [Google Scholar] [CrossRef]
- Luo, W.; Wei, D. A Frequency-Adaptive Improved Moving-Average-Filter-Based Quasi-Type-1 PLL for Adverse Grid Conditions. IEEE Access 2020, 8, 54145–54153. [Google Scholar] [CrossRef]
- Robles, E.; Ceballos, S.; Pou, J.; Martín, J.L.; Zaragoza, J.; Ibañez, P. Variable-Frequency Grid-Sequence Detector Based on a Quasi-Ideal Low-Pass Filter Stage and a Phase-Locked Loop. IEEE Trans. Power Electron. 2010, 25, 2552–2563. [Google Scholar] [CrossRef]
- Mirhosseini, M.; Pou, J.; Agelidis, V.G.; Robles, E.; Ceballos, S. A Three-Phase Frequency-Adaptive Phase-Locked Loop for Independent Single-Phase Operation. IEEE Trans. Power Electron. 2014, 29, 6255–6259. [Google Scholar] [CrossRef]
- Li, J.; Wang, Q.; Xiao, L.; Hu, Y.; Wu, Q.; Liu, Z. An αβ-Frame Moving Average Filter to Improve the Dynamic Performance of Phase-Locked Loop. IEEE Access 2020, 8, 180661–180671. [Google Scholar] [CrossRef]
- Freijedo, F.D.; Doval-Gandoy, J.; Lpez, O.; Acha, E. A Generic Open-Loop Algorithm for Three-Phase Grid Voltage/Current Synchronization With Particular Reference to Phase, Frequency, and Amplitude Estimation. IEEE Trans. Power Electron. 2009, 24, 94–107. [Google Scholar] [CrossRef]
- Gonzalez-Espin, F.; Figueres, E.; Garcera, G. An Adaptive Synchronous-Reference-Frame Phase-Locked Loop for Power Quality Improvement in a Polluted Utility Grid. IEEE Trans. Ind. Electron. 2012, 59, 2718–2731. [Google Scholar] [CrossRef]
- Freijedo, F.D.; Doval-Gandoy, J.; Lopez, O.; Fernandez-Comesana, P.; Martinez-Penalver, C. A Signal-Processing Adaptive Algorithm for Selective Current Harmonic Cancellation in Active Power Filters. IEEE Trans. Ind. Electron. 2009, 56, 2829–2840. [Google Scholar] [CrossRef]
- Tahir, M.; Mazumder, S.K. Improving Dynamic Response of Active Harmonic Compensator Using Digital Comb Filter. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 994–1002. [Google Scholar] [CrossRef]
- IEEE Standard 519-2014; IEEE Recommended Practice and Requirements for Harmonic Control in Electrical Power Systems. IEEE: New York, NY, USA, 2014.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Harmonic Order h | h < 11 | 11 ≤ h and h < 17 | 17 ≤ h and h < 23 | 23 ≤ h and h < 35 | h ≥ 35 | Total Distortion |
|---|---|---|---|---|---|---|
| Distortion Limits | 4.0% | 2.0% | 1.5% | 0.6% | 0.3% | 5.0% |
| Voltage harmonics | 30% | 5% | 0 | 0 | 0 | 35% |
| After Filtering | 0.47% | 0.08% | 0 | 0 | 0 | 0.55% |
| PLL | Case 1 | Case 2 | Case 3 |
|---|---|---|---|
| SRF-PLL | 22.46 | 22.48 | 22.41 |
| MAF-PLL | 1.89 | 0.19 | 0.15 |
| FACIIRF-PLL | 0.32 | 0.21 | 0.16 |
| PLL | Computing Overhead (μs) | Harmonic Suppression | Dynamic Performance |
|---|---|---|---|
| SRF-PLL | 13 | Poor | Average |
| MAF-PLL | 25 | Excellent | Average |
| FACIIRF-PLL | 29 | Excellent | Good |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ke, S.; Li, Y. Grid-Connected Phase-Locked Loop Technology Based on a Cascade Second-Order IIR Filter. Energies 2023, 16, 3967. https://doi.org/10.3390/en16093967
Ke S, Li Y. Grid-Connected Phase-Locked Loop Technology Based on a Cascade Second-Order IIR Filter. Energies. 2023; 16(9):3967. https://doi.org/10.3390/en16093967
Chicago/Turabian StyleKe, Shanwen, and Yuren Li. 2023. "Grid-Connected Phase-Locked Loop Technology Based on a Cascade Second-Order IIR Filter" Energies 16, no. 9: 3967. https://doi.org/10.3390/en16093967
APA StyleKe, S., & Li, Y. (2023). Grid-Connected Phase-Locked Loop Technology Based on a Cascade Second-Order IIR Filter. Energies, 16(9), 3967. https://doi.org/10.3390/en16093967