
Numerical Investigation of the Fracture Mechanism of Defective Graphene Sheets


Abstract
:1. Introduction
2. Model and Methodology
2.1. Equivalent Nonlinear Timoshenko Beams for Covalent Carbon–Carbon (C–C) Bonds
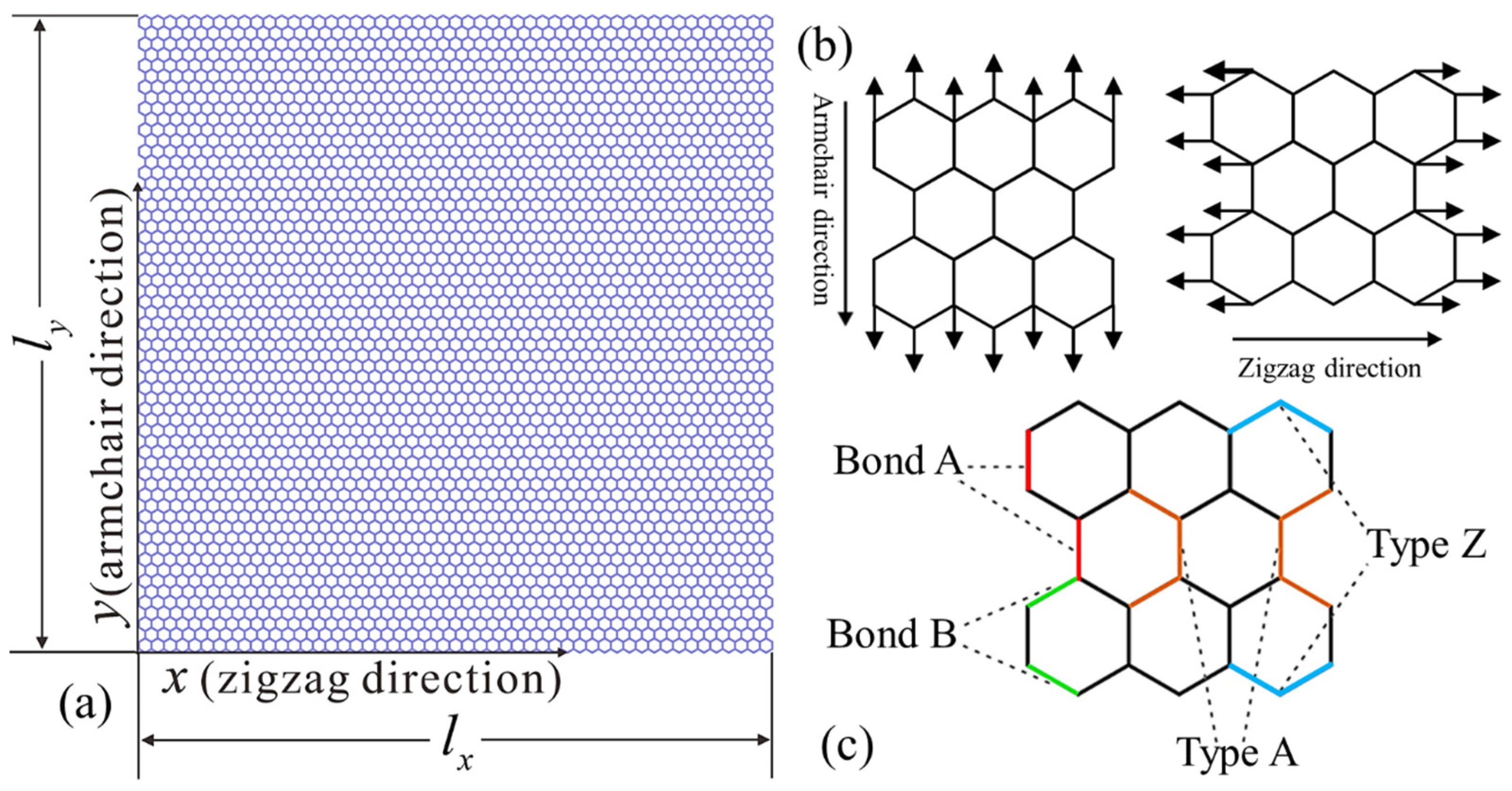
2.2. FE Model of the Pristine Graphene and Verifications
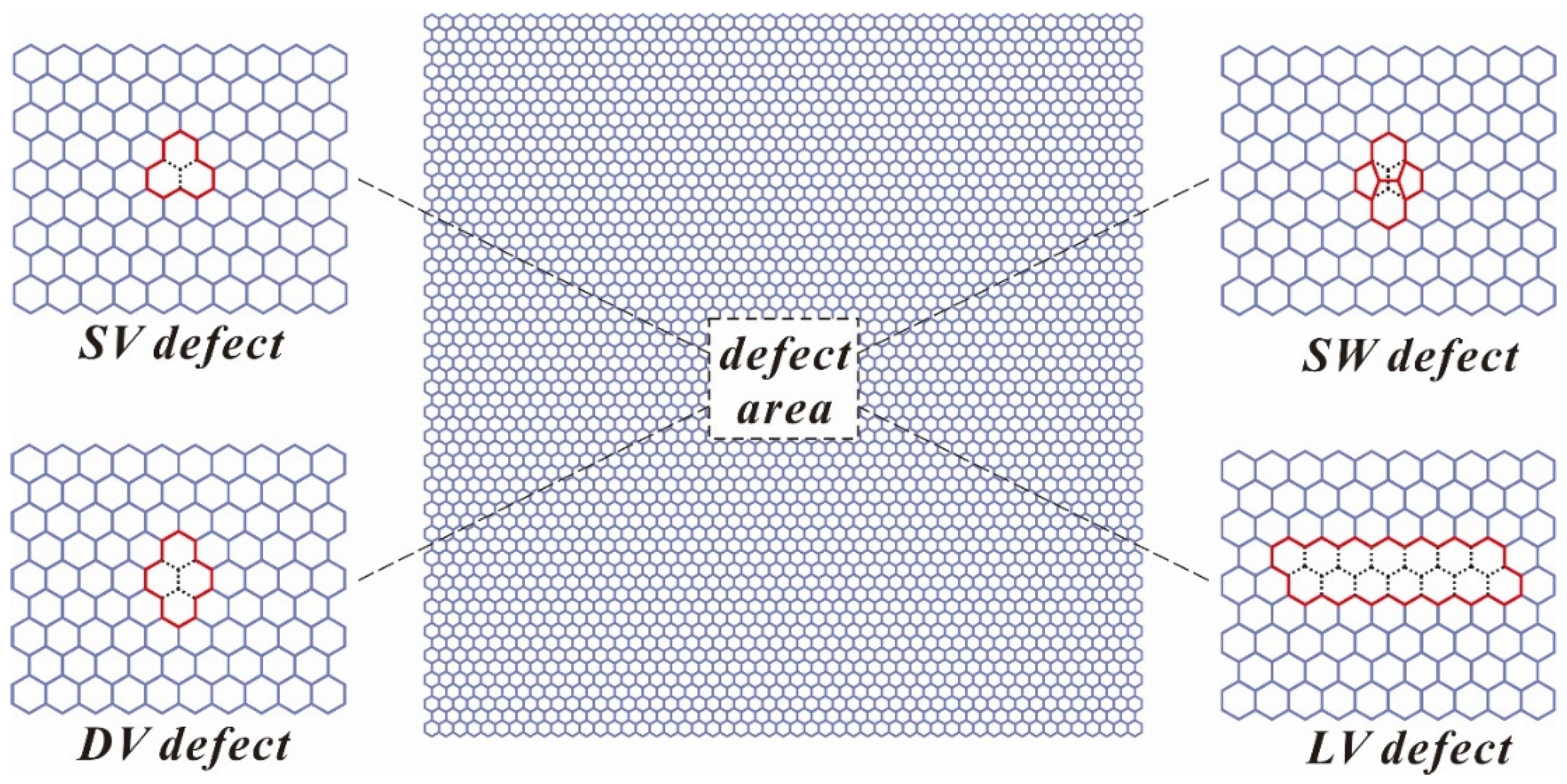
2.3. FE Model of the Defective Graphene
3. Results and Discussion
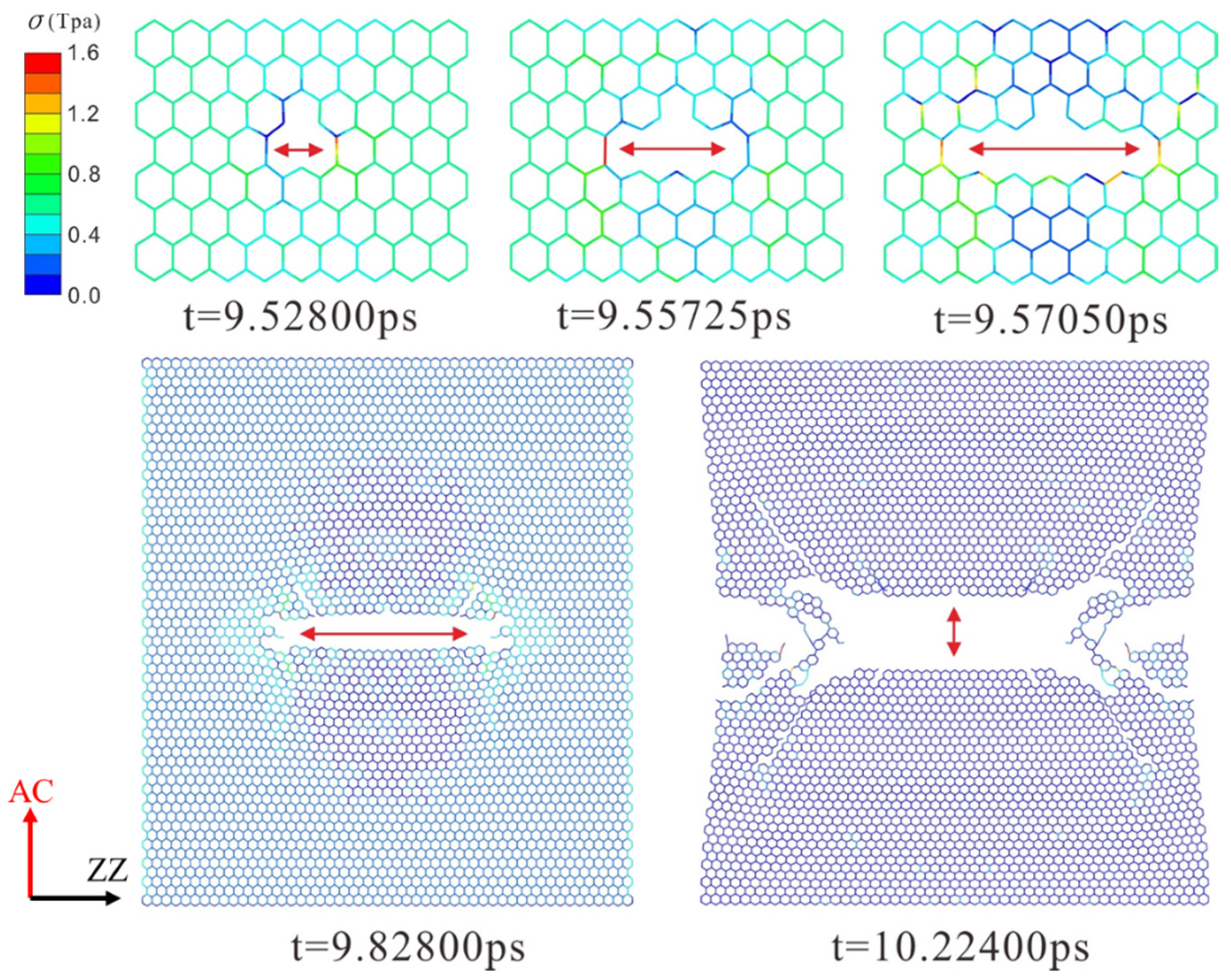
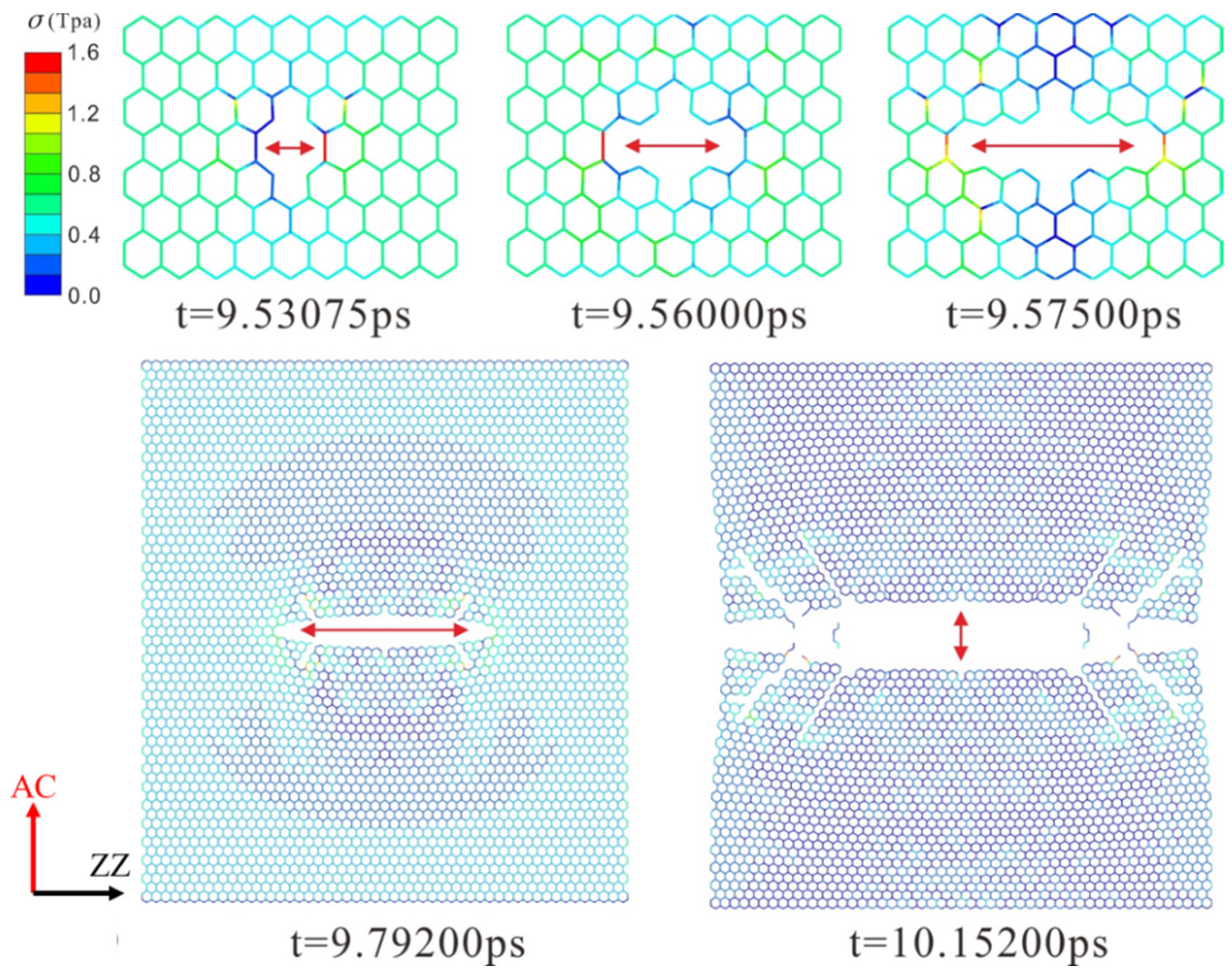
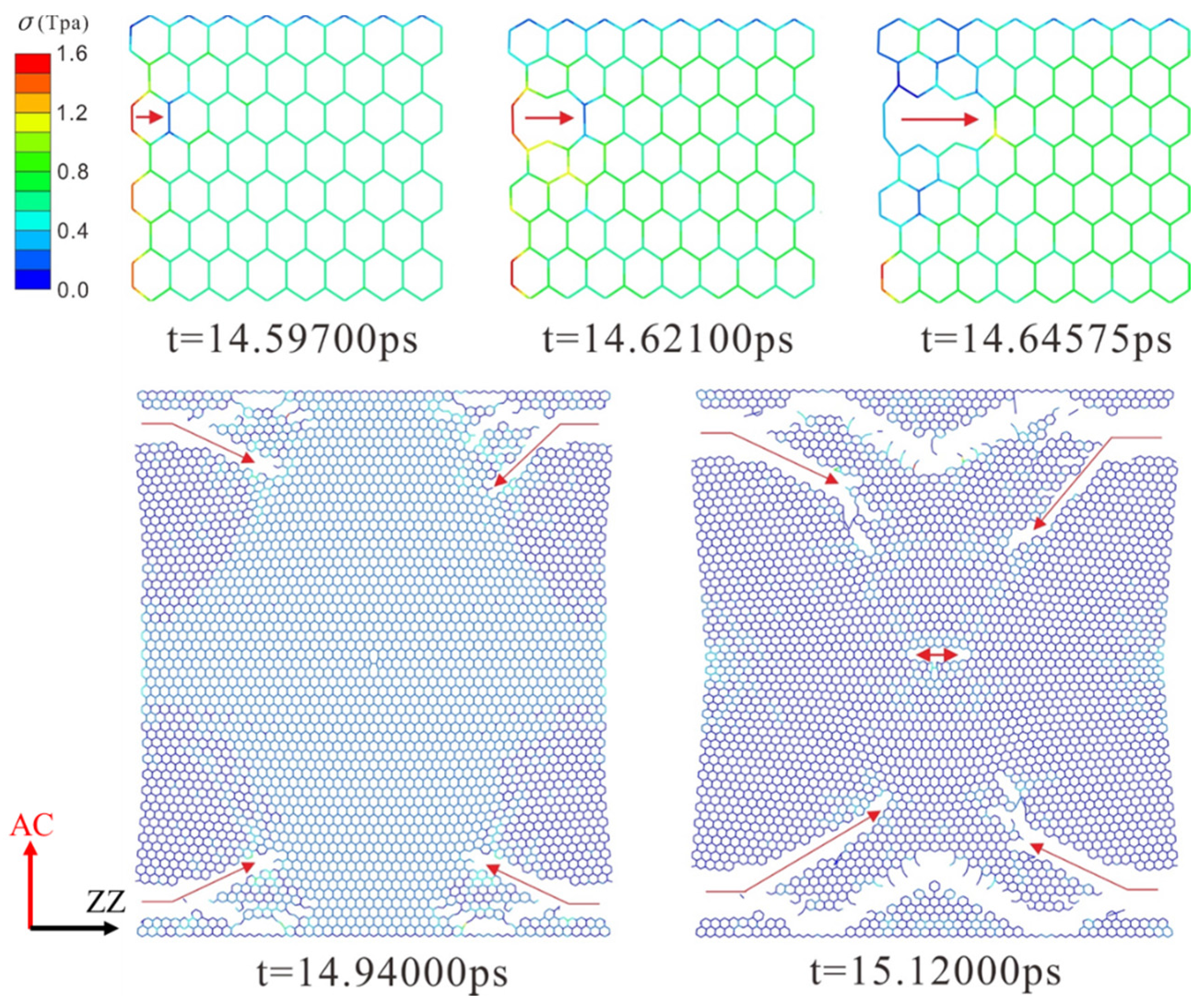
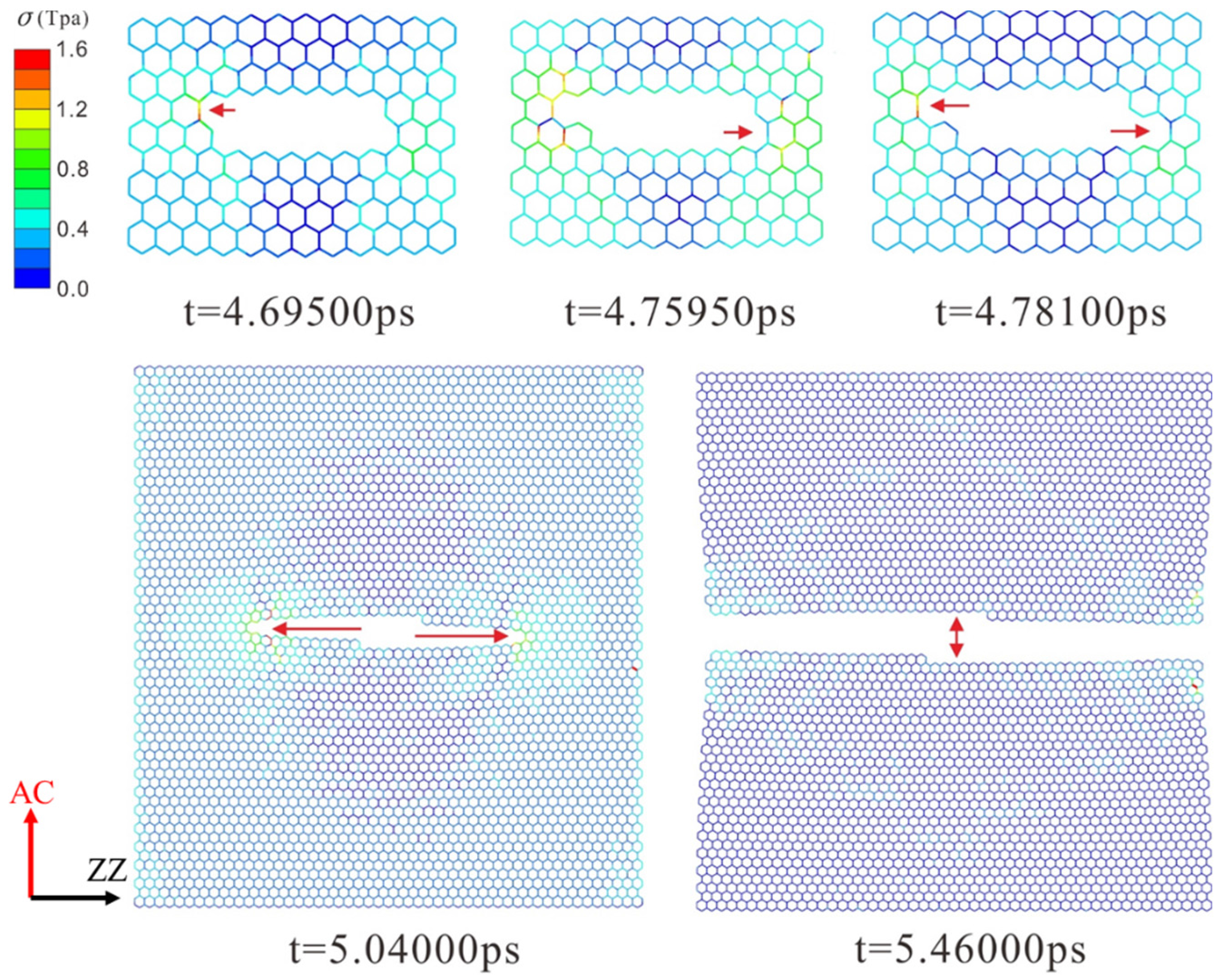
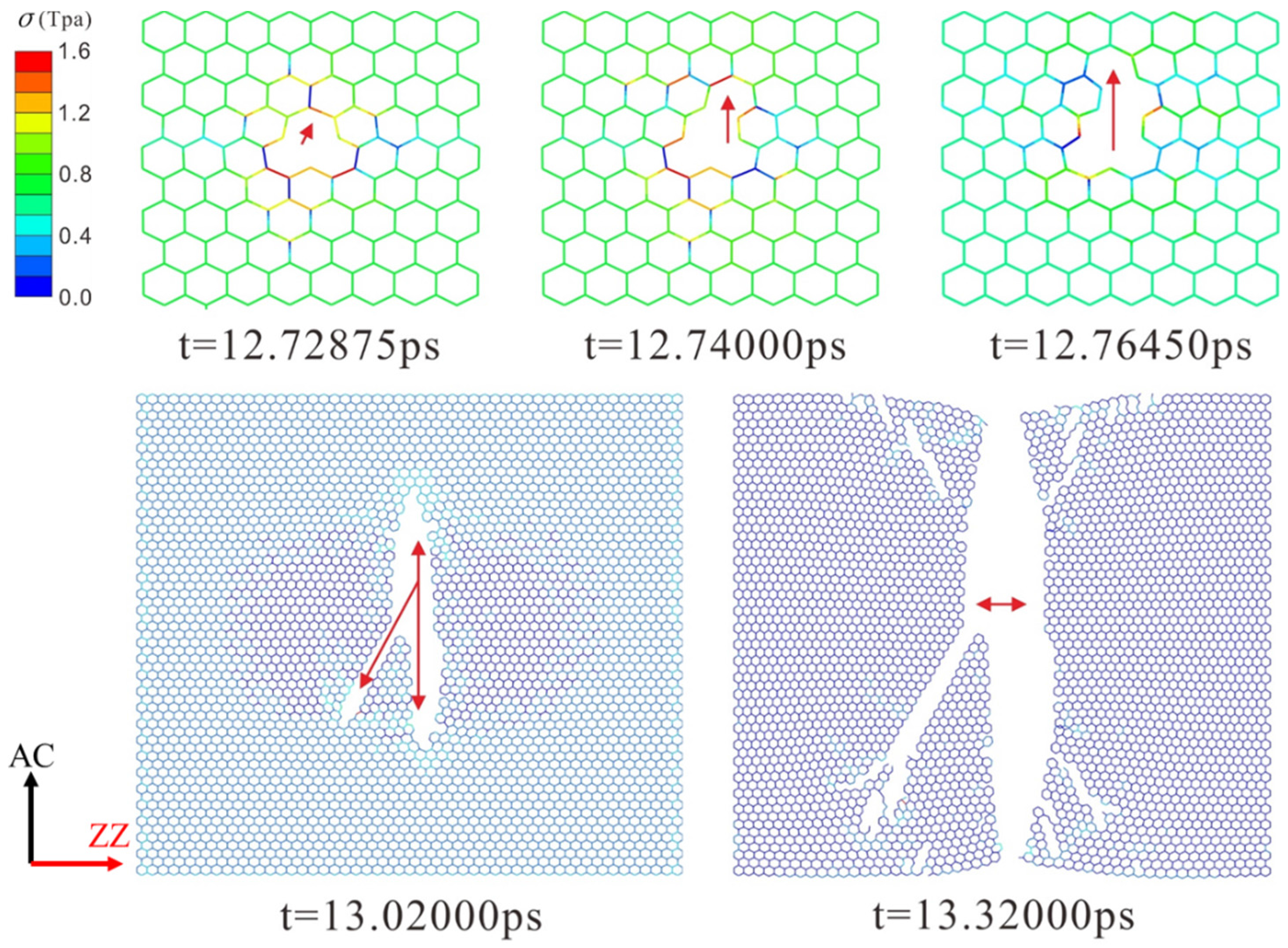
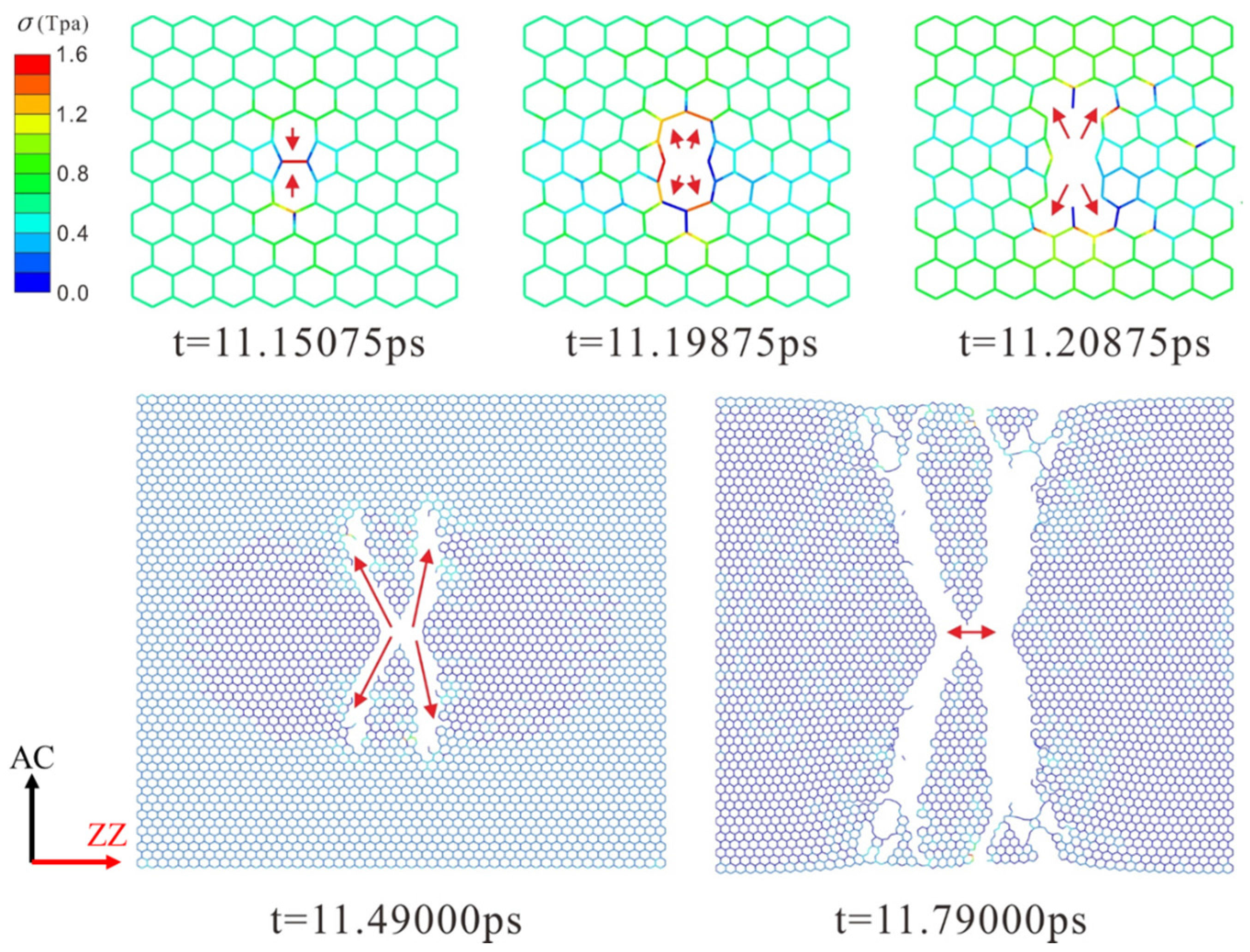
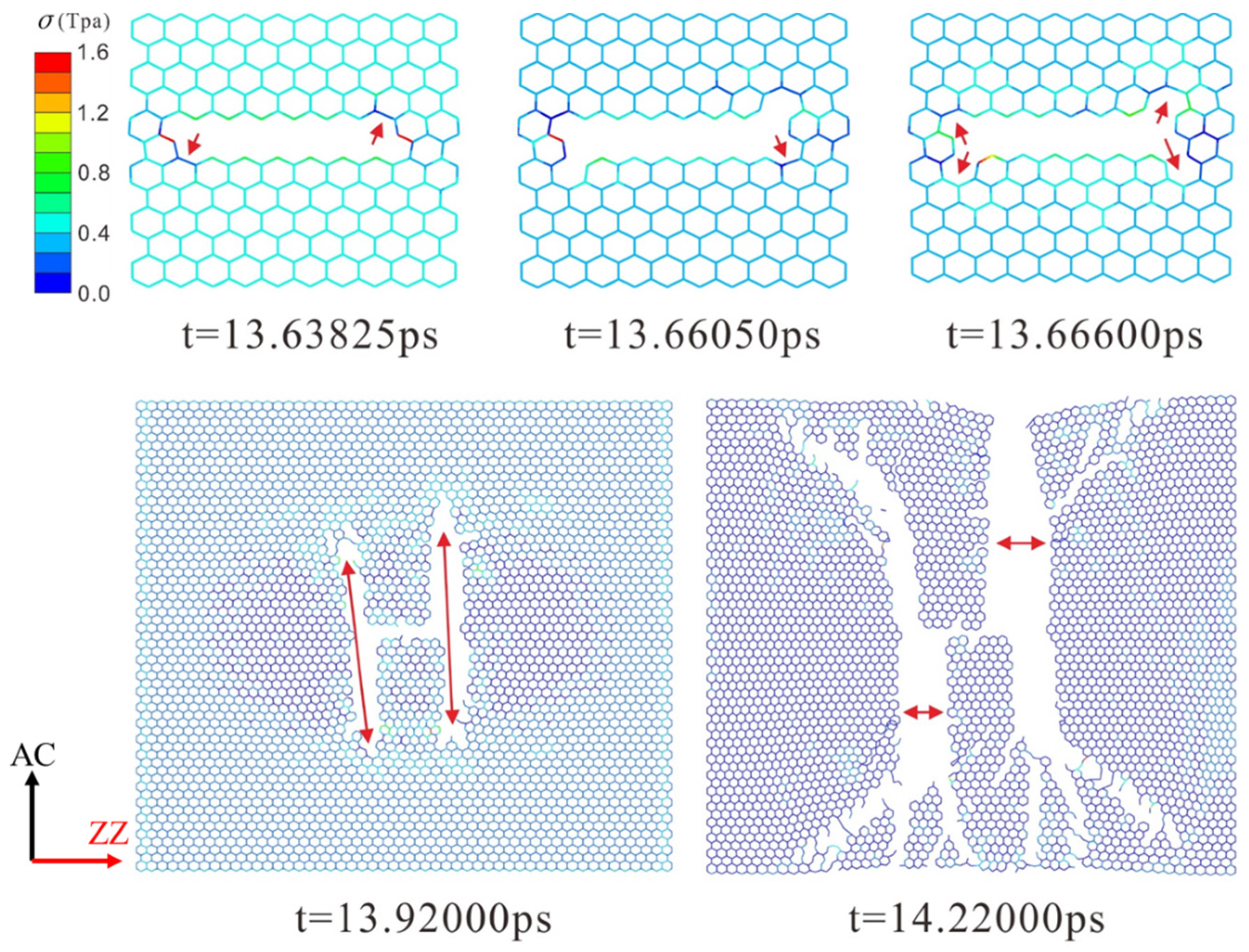
3.1. Dynamic Fracture of Graphene with Different Defects
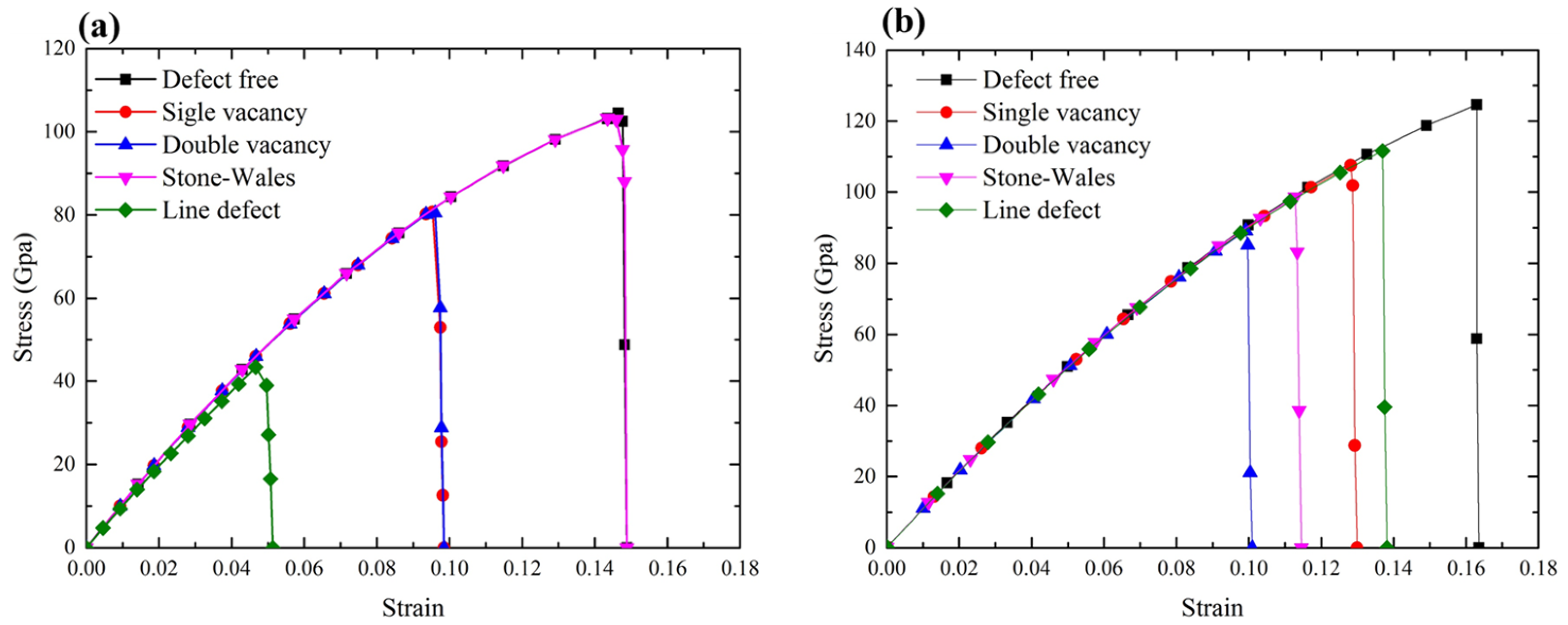
3.2. Fracture Strength of Graphene with Different Defects
4. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Novoselov, K.S.; Geim, A.K.; Morozov, S.V.; Jiang, D.; Zhang, Y.; Dubonos, S.V.; Grigorieva, I.V.; Firsov, A.A. Electric Field Effect in Atomically Thin Carbon Films. Science 2004, 306, 666–669. [Google Scholar] [CrossRef] [PubMed]
- Chen, H.; Müller, M.B.; Gilmore, K.J.; Wallace, G.G.; Li, D. Mechanically strong, electrically conductive, and biocompatible graphene paper. Adv. Mater. 2008, 20, 3557–3561. [Google Scholar] [CrossRef]
- Geim, A.K. Graphene: Status and Prospects. Science 2009, 324, 1530–1534. [Google Scholar] [CrossRef] [PubMed]
- Somani, P.R.; Somani, S.P.; Umeno, M. Planer nano-graphenes from camphor by CVD. Chem. Phys. Lett. 2006, 430, 56–59. [Google Scholar] [CrossRef]
- Green, A.A.; Hersam, M.C. Solution phase production of graphene with controlled thickness via density differentiation. Nano Lett. 2009, 9, 4031–4036. [Google Scholar] [CrossRef]
- Garaj, S.; Hubbard, W.; Golovchenko, J.A. Graphene synthesis by ion implantation. Appl. Phys. Lett. 2010, 97, 183103. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Han, Q.; Xin, D. Fracture analysis of single-layer graphene sheets with edge crack under tension. Mol. Simul. 2015, 41, 325–332. [Google Scholar] [CrossRef]
- Daniels, C.; Horning, A.; Phillips, A.; Massote, D.V.; Liang, L.; Bullard, Z.; Sumpter, B.G.; Meunier, V. Elastic, plastic, and fracture mechanisms in graphene materials. J. Phys. Condens. Matter 2015, 27, 373002. [Google Scholar] [CrossRef] [PubMed]
- Rajasekaran, G.; Narayanan, P.; Parashar, A. Effect of Point and Line Defects on Mechanical and Thermal Properties of Graphene: A Review. Crit. Rev. Solid State Mater. Sci. 2015, 41, 47–71. [Google Scholar] [CrossRef]
- Daly, M.; Reeve, M.; Singh, C.V. Effects of topological point reconstructions on the fracture strength and deformation mechanisms of graphene. Comput. Mater. Sci. 2015, 172–180. [Google Scholar] [CrossRef]
- Zhang, B.; Mei, L.; Xiao, H. Nanofracture in graphene under complex mechanical stresses. Appl. Phys. Lett. 2012, 101, 123915. [Google Scholar] [CrossRef]
- Wang, S.; Yang, B.; Yuan, J.; Si, Y.; Chen, H. Large-Scale Molecular Simulations on the Mechanical Response and Failure Behavior of a defective Graphene: Cases of 5-8-5 Defects. Sci. Rep. 2015, 5, 14957. [Google Scholar] [CrossRef] [PubMed]
- Xu, M.; Tabarraei, A.; Paci, J.T.; Oswald, J.; Belytschko, T. A coupled quantum/continuum mechanics study of graphene fracture. Int. J. Fract. 2012, 173, 163–173. [Google Scholar] [CrossRef]
- Georgantzinos, S.K.; Katsareas, D.E.; Anifantis, N.K. Limit load analysis of graphene with pinhole defects: A nonlinear structural mechanics approach. Int. J. Mech. Sci. 2012, 55, 85–94. [Google Scholar] [CrossRef]
- He, L.; Guo, S.; Lei, J.; Sha, Z.; Liu, Z. The effect of Stone-Thrower-Wales defects on mechanical properties of graphene sheets—A molecular dynamics study. Carbon 2014, 75, 124–132. [Google Scholar] [CrossRef]
- Xiao, J.R.; Staniszewski, J.; Gillespie, J.W. Fracture and progressive failure of defective graphene sheets and carbon nanotubes. Compos. Struct. 2009, 88, 602–609. [Google Scholar] [CrossRef]
- Baykasoglu, C.; Mugan, A. Nonlinear fracture analysis of single-layer graphene sheets. Eng. Fract. Mech. 2012, 96, 241–250. [Google Scholar] [CrossRef]
- Canadija, M.; Brčić, M.; Brnić, J. Bending behaviour of single-layered graphene nanosheets with vacancy defects. Eng. Rev. 2013, 33, 9–14. [Google Scholar]
- Zhang, B.; Xiao, H.; Yang, G.; Liu, X. Finite element modelling of the instability in rapid fracture of graphene. Eng. Fract. Mech. 2015, 141, 111–119. [Google Scholar] [CrossRef]
- Scarpa, F.; Adhikari, S.; Srikantha, P.A. Effective elastic mechanical properties of single layer graphene sheets. Nanotechnology 2009, 20, 2643–2646. [Google Scholar] [CrossRef] [PubMed]
- Belytschko, T.; Xiao, S.P.; Schatz, G.C.; Ruoff, R.S. Atomistic simulations of nanotube fracture. Phys. Rev. B Condens. Matter 2002, 65, 121. [Google Scholar] [CrossRef]
- Wang, M.C.; Yan, C.; Ma, L.; Hu, N.; Chen, M.W. Effect of defects on fracture strength of graphene sheets. Comput. Mater. Sci. 2012, 54, 236–239. [Google Scholar] [CrossRef]
- Liu, F.; Ming, P.; Li, J. Ab initio calculation of ideal strength and phonon instability of graphene under tension. Phys. Rev. B 2007, 76, 471–478. [Google Scholar]
- Ansari, R.; Ajori, S.; Motevalli, B. Mechanical properties of defective single-layered graphene sheets via molecular dynamics simulation. Superlattices Microstruct. 2012, 51, 274–289. [Google Scholar] [CrossRef]
- Lee, C.; Wei, X.; Kysar, J.W.; Hone, J. Measurement of the elastic properties and intrinsic strength of monolayer graphene. Science 2008, 321, 385–388. [Google Scholar] [CrossRef] [PubMed]
- Omeltchenko, A.; Yu, J. Crack front propagation and fracture in a graphite sheet: A molecular-dynamics study on parallel computers. Phys. Rev. Lett. 1997, 78, 2148–2151. [Google Scholar] [CrossRef]
- Zhang, B.; Yang, G.; Xu, H. Instability of supersonic crack in graphene. Phys. Rev. B Condens. Matter 2014, 434, 145–148. [Google Scholar] [CrossRef]
- Lin, Q.Y.; Zeng, Y.H.; Liu, D.; Jing, G.Y.; Liao, Z.M.; Yu, D. Step-by-Step Fracture of Two-Layer Stacked Graphene Membranes. ACS Nano 2014, 8, 10246–10251. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bond cross-sectional diameter, d | 0.089 nm |
|---|---|
| Bond length, r0 | 0.142 nm |
| Cross-sectional area, A | 6.22 × 10 –3 nm2 |
| Moment of inertia, Ib | 3.08 × 10 –3 nm4 |
| Young’s modulus, Eb | 19.5 TPa |
| Poisson’s ratio, μb | 0.23 |
| Shear modulus, Gb | 7.93 TPa |
| Direction | Young’s modulus (TPa) | Poisson’s Ratio |
|---|---|---|
| AC direction | 1.075 | 0.172 |
| ZZ direction | 1.096 | 0.162 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, N.; Ren, Z.; Jing, G.; Guo, J.; Peng, B.; Jiang, H. Numerical Investigation of the Fracture Mechanism of Defective Graphene Sheets. Materials 2017, 10, 164. https://doi.org/10.3390/ma10020164
Fan N, Ren Z, Jing G, Guo J, Peng B, Jiang H. Numerical Investigation of the Fracture Mechanism of Defective Graphene Sheets. Materials. 2017; 10(2):164. https://doi.org/10.3390/ma10020164
Chicago/Turabian StyleFan, Na, Zhenzhou Ren, Guangyin Jing, Jian Guo, Bei Peng, and Hai Jiang. 2017. "Numerical Investigation of the Fracture Mechanism of Defective Graphene Sheets" Materials 10, no. 2: 164. https://doi.org/10.3390/ma10020164
APA StyleFan, N., Ren, Z., Jing, G., Guo, J., Peng, B., & Jiang, H. (2017). Numerical Investigation of the Fracture Mechanism of Defective Graphene Sheets. Materials, 10(2), 164. https://doi.org/10.3390/ma10020164